基于PIC單片機的數顯扭矩扳手控制系統設計*
2022-03-23 06:01:46陳建軍汪小武夏政誠
傳感器與微系統 2022年3期
關鍵詞:單片機
陳建軍, 謝 峰, 汪小武, 馬 亮, 夏政誠
(安徽大學 電氣工程與自動化學院,安徽 合肥 230601)
0 引 言
隨著工業進程的發展,不同機械部件之間的聯結趨于精密。然而,傳統的機械扳手因無法提供較大扭矩及控制精度低等原因會出現“欠擰緊”與“超擰緊”現象,因而無法確保聯結的可靠性和滿足現代化生產的要求,所以,研制一款控制精度較高的數顯扭矩扳手具有很高的實用價值[1]。
針對數顯扳手扭矩輸出的控制,許多學者做了深入的研究。李晶設計了一種霍爾傳感器用于監測控制扭矩,并將扭矩信息處理后通過數碼管進行顯示,但該方案的整體控制功能簡單,控制精度稍低[2];石延平等人從傳感器出發,利用壓磁效應研制出一種非接觸式動態扭矩傳感器可實現對扭矩值的輸出控制[3];為解決扭矩傳感器安裝不易等問題,盧臘等人基于應變檢測原理和無線傳輸技術設計出一種動態扭矩測量系統來實現對扭矩的控制[4];湯春球、李博文等則利用扭矩轉角法來控制扭矩的輸出,可實現對扭矩的精準控制[5,6]。上述方案均采用扭矩傳感器進行扭矩監控,雖能精確控制扭矩輸出,但由于扭矩扳手工作環境惡劣,外部環境中存在大量的電磁干擾,扭矩傳感器很可能因為采集的數據出錯而導致顯示錯誤甚至失控等問題,具有極大的安全隱患。
本文提出了一種通過檢測扳手運行中的電流和轉速信號來控制扭矩輸出的方案。該方案能準確傳遞輸出扭矩、有效控制電機正反轉及反映系統異常工作狀態,大大地提高了系統的安全性和準確性。實驗結果表明,系統誤差達到預期設計要求,扭矩輸出穩定、精確,完成了一種新型數顯扭矩扳手的研制。
1 數顯扭矩扳手系統方案
1.1 控制系統的原理
本設計使用直流有刷電機進行扭矩輸出。在直流電動機運轉中,電機軸上的動力學方程為[7]
(1)
式中Tem為電磁轉矩,T1為負載轉矩,T2為空載轉矩,J為轉動慣量,GD2為電機軸上的飛輪慣量。
當電機運轉中,由于空載T2很小,可忽略不計,所以由式(1)可得
(2)
直流電動機所產生的電磁轉矩Tem為
Tem=CTΦIa
(3)
式中CT=Np/2πa為轉矩常數;Φ為電樞磁通。
聯立式(2)、式(3)可得負載轉矩T1為
(4)
由式(4)可知負載轉矩與轉子電流和轉速之間的關系方程T1=f(Ia,n)。由以上分析可知電機的電磁轉矩隨著電樞電流的增加而線性增加,當負載較大時,電樞反應的去磁作用會使電磁轉矩略有下降。而電機空載時,電樞電流Ia=Ia0,電磁轉矩Tem=CTΦIa0=T2;帶動負載時T′em-T1-T2=(GD2/375)×(dn/dt);可得到電機負載運行時轉矩與除去空載運行電樞的電流增量和扭矩之間的關系方程T1=f(ΔIa,n)[7]。綜上所述,電機的負載扭矩由電機運行時的電流和轉速決定,所以,可通過檢測電流和轉速信號進而得到電機具體的負載扭矩值。
1.2 系統整體方案設計
采用模塊化的思想設計系統硬件電路,主要有主控制器模塊、電機驅動模塊、參數檢測模塊、電源模塊、人機交互模塊、系統保護模塊以及上位機通信模塊。系統原理如圖1所示。

圖1 硬件電路總框圖
2 系統硬件設計
2.1 主控制模塊
選取PIC18F4520單片機為主控制器,它價格低廉,抗干擾能力強。該單片機采用互補金屬氧化物半導體(complementary metal oxide semiconductor,CMOS)結構,功耗極低,其I/O端口具有25 mA吸入/拉出電流,可直接用于驅動繼電器和光耦[8]。還具有8通道10位模數轉換器,3個定時器,2個捕獲/比較/脈寬調制(pulse width modulation,PWM)功能,以滿足控制系統對信號采集的要求,同時還有數據存儲和與計算機通信的功能。
2.2 電機驅動模塊
采用了PWM控制HIP4081電機驅動芯片調節晶閘管導通的方式來控制電機的啟動。該方式可降低電機啟動時的瞬時電流,能保護整個電路并提高信號采集精度。HIP4081驅動芯片輸出電流峰值為2 A,工作頻率為1 MHz,具有DIS禁止端,能夠控制芯片所有端口的輸入,方便與外圍電路結合組成保護電路。如圖2所示,用4個金屬氧化物半導體場效應管(metal oxide semiconductor field effect transistor,MOSFET)和電機組成H型驅動電路,將HIP4081驅動芯片的ALI和BLI接到單片機上,由單片機提供相應的PWM驅動信號,該信號經驅動芯片控制H橋可實現電機平穩啟動和正、反轉。

圖2 電機驅動電路
2.3 參數采集模塊
參數采集分為電流采集和轉速采集兩部分。使用ACS758電流傳感器采集電流信號。該傳感器可測量0~100 A的電流,靈敏度40 mV/A。如圖3所示,采集的電流信號從IP+端口進入ACS758模塊,經ACS758處理后從VIOUT口輸出。為了提高電流的采集精度,將采集的電流信號經過濾波后,從OPAI輸出到單片機的RA1接口,經A/D轉換后變成數字量并存儲在寄存器中以備隨時調用。

圖3 電流檢測電路
使用霍爾轉速傳感器測量電機的轉速。其工作原理是在電機軸上安裝磁性轉盤,傳感器安裝在磁體旁邊,當電機轉動時將帶動磁盤轉動,傳感器每檢測到一次磁體就會輸出一個相應的脈沖,求得單位時間的脈沖數便可得被測轉速[9]。本設計使用SJ1092H型霍爾轉速傳感器,其頻響特性處于0~20 kHz,負載能力最大20 mA。電路如圖4所示,為了提高轉速采集的精確度,加入了RC電路,可有效消除轉速信號的高平干擾。
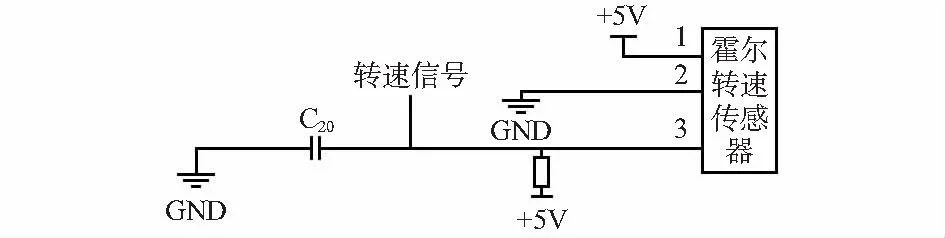
圖4 轉速檢測電路
3 系統軟件設計總方案
軟件開發環境是由MPLAB、HI-TECH和PIC單片機聯合組成。使用C語言在MPLAB上進行編寫,用HI-TECH進行編譯并下載到PIC單片機中。該軟件可實現程序的在線編程和修改,簡單方便。
1)系統上電后,初始化各端口寄存器和模塊。隨后在扭矩設置界面設定扭矩,選擇電機正反轉方向,按下啟動按鍵,進入PWM驅動程序。將單片機的CCP1設置為PWM模式,并給周期寄存器設定初始周期和脈寬值。打開TMR2定時器,逐漸增加脈寬值到100 %,隨后關閉CCP1并將RC2引腳置1,保持電機平穩運轉。
2)轉速采集使用CCP模塊捕捉單個脈沖的上升沿時間Tk1和下降沿時間Tk2,則周期T=2(Tk2-Tk1),頻率f=1/T,根據式n=60f/p可計算出轉速;電流信號則使用電流傳感器采集。
3)利用單片機內置的10位高速A/D模塊對采集數據進行轉換。為了保證采集數據的準確性,使用滑動加權平均濾波算法對數據進行平滑濾波。原理為:定義長度M=10的序列,每次采集的數據都從序列尾部輸入。當數據多余10個時,多余的數據會從頭部移除,對10個數據加權后取平均值作為采樣輸出值。其公式如下
(5)
式中ci為加權系數,ci=1/Δ;其中,Δ=1+e-r+e-2r+…+e-(N-1)r,r為滯后時間。
4)將采集的轉速和電流輸入單片機中計算出當前的扭矩值,與設定的扭矩值比較。當計算的扭矩值和設定的數值相等時,電機停止轉動,顯示“完成”字樣。若小于設定值,則繼續工作直至達到預設值時停止。整個過程都會對電壓、溫度和電流進行檢測,一旦出現異常系統會自動停止并顯示。
4 系統性能測試與精度檢測
為了驗證設計的數顯扭矩扳手控制系統的控制精度,需要進行實驗測試。在完成所有硬件模塊調試和軟件編程后,搭建如圖5所示的扭矩測試平臺進行測試。本實驗選取1 200~3 000 N·m測試范圍,間隔300 N·m測試一次,每次測試3組取平均值。測得數據如表1所示。

圖5 扭矩測試平臺

表1 測試數據 (N·m)
4.1 測試數據分析與校準
理論上,電動扳手的設定值應與實際值保持一致。但是由于影響扳手的精度除了建立模型對應的轉速、電流之外,還受電機的機械因素等影響,加上扳手使用中溫度升高會影響磁通量,而理論考慮時認為磁通量為定值,因此出現表1所示情況。
針對這種情況,將測試數據導入MATLAB中,使用線性回歸的方法對數據進行擬合、校準。取線性回歸模型的數學方程為
y=a+bx+ε
(6)
式中a為截距項,b為斜率項,ε為誤差項,x為設定扭矩值,y為實際扭矩值。當誤差項ε達到最小可得到期望曲線。由于ε可為正值或負值,所以將ε達到最小轉換為ε平方和最小問題。計算公式如下
(7)
若使J(a,b)達到最小,可對a,b求偏導來求解參數a和b,進而得到J(a,b)的最小值。計算公式如下
(8)
聯立式(6)~式(8)可得
(9)
扳手使用前,需先采集x1=1 200 N·m和x2=3 000 N·m兩個點對應的實際值,代入式(6)、式(9)中計算出線性回歸曲線,按照校正后的曲線模型進行扭矩輸出。這種方法的優點是能有效避免電機在生產中造成的參數不一致等因素對扭矩輸出的影響,大大提高扭矩控制精度。
4.2 系統精度檢測與誤差分析
在扳手使用前先測量1 200 N·m和3 000 N·m對應的扭矩值進行參數校準。校準完成后通過扭矩測量平臺進行扭矩輸出精度測試,測得數據如表2所示。

表2 校準后測試結果
由表2可知,在1 200~3 000 N·m的扭矩測試范圍中,該數顯扭矩扳手能以設定的扭矩對螺栓進行緊固,扭矩輸出相對誤差最高為4.51 %,最低為1.27 %,且扭矩輸出較為平穩,離散性較小,控制精度均優于±5 %,系統控制精度滿足設計要求,數顯扭矩扳手功能基本實現。
然而理論上設定的扭矩應該和實際輸出的扭矩保持一致。分析±5 %的誤差存在的原因是:影響扳手的精度除了建立模型對應的轉速、電流之外,還受電機的機械因素等影響;扳手運轉中,測量設備間的機械摩擦阻力影響了一部分扭矩輸出;扭矩測量儀器存在著±1 %的系統測量誤差。
5 結 論
本文以PIC單片機為核心,通過合理的軟件和硬件設計,在節約成本的同時完成了數顯扭矩扳手控制系統的設計。實驗結果表明:本文系統實現了對扭矩輸出的精確控制,扭矩相對誤差控制在±5 %以內,并具有可靠性高,工作狀態可追溯及方便攜帶等優點,達到了預期設計要求,具有廣泛的應用前景。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
