基于指定性能的非線性系統數據驅動滑模控制
2022-03-21 14:29:32楊祎桀曲袁超
沈陽師范大學學報(自然科學版) 2022年6期
楊祎桀, 劉 冬, 曲袁超
(1. 沈陽航空航天大學 自動化學院, 沈陽 110136; 2. 遼寧大學 數學與統計學院, 沈陽 110136)
0 引 言
隨著科學技術的快速發展,實際受控系統的復雜性日益增加,使得系統建模愈加困難。在此背景下,系統在線數據的利用顯得格外重要。數據驅動控制方法在控制器設計過程中只使用輸入輸出數據,而不需要系統的精確數學模型,從而引起了研究人員的廣泛興趣。近年來,出現了許多數據驅動控制方法,如無模型自適應控制[1]、虛擬參考反饋整定[2]和迭代學習控制[3]等。
現代控制理論與方法可以很好地解決機理模型可精確獲取和機理模型可獲取但含有不確定因素2種被控對象。但對于復雜的高階、強非線性的被控對象,機理模型很難建立或不可獲取。因此,無模型自適應控制方法由于不需要數學模型的顯式或隱式知識而引起了廣泛關注。無模型自適應控制方法首先在文獻[4]中被提出,在文獻[5-7]中被擴展和完善。基于動態線性化技術和偽偏導數的概念,研究人員沿閉環系統的動態操作點建立了一系列的局部動態線性化數據模型,包括緊格式動態線性化、偏格式動態線性化和全格式動態線性化等效的局部動態線性化數據模型。迄今為止,無模型自適應控制已成功應用于許多領域,如無人駕駛技術等[8]。
另一方面,滑模控制方法因其對不確定性和外界干擾的魯棒性以及具有較快的收斂速度而得到廣泛應用。為了充分利用無模型自適應控制和滑模控制的優點,文獻[9]中引入了一種基于無模型自適應控制的離散滑模控制器。隨后,在文獻[9]的啟發下,出現了各種類型的無模型自適應滑模控制器。在文獻[10]中,針對不確定機器人系統模型不準確和參數時變的問題,提出了一種無模型自適應滑模控制方法,證明了即使在無法建立準確模型的情況下,所提出的方法也可使不確定機器人系統穩定。滑模控制中的抖顫問題不可避免地影響著控制性能,為此,研究人員提出了許多抑制抖顫問題的方法,如趨近律法和邊界層法等。
為了實現靜態和瞬態條件下的跟蹤性能, 同時保證變換誤差系統的穩定性, 在文獻[11]中提出了指定性能控制方法。 近年來,許多文獻將指定性能控制方法與其他方法相結合并應用于各種系統中。 如文獻[12]在考慮指定性能和全狀態約束的基礎上提出了一種事件觸發自適應控制算法, 解決了一類非嚴反饋非線性多智能體系統的一致性跟蹤問題。 針對一類帶有輸入死區約束的嚴反饋非線性系統, 文獻[13]將指定性能控制與模糊控制、最優控制、backstepping方法及命令濾波技術和自適應動態規劃技術相結合, 設計了一種最優反饋控制器。
基于上述討論,針對單輸入單輸出離散非線性系統,本文提出了一種基于指定性能的無模型自適應滑模控制方法。與已有的具有預先定義性能的滑模控制器設計文獻相比,本文引入一種新的正切型誤差轉換函數,以保證跟蹤誤差收斂到預定義的可調邊界內,不同于現有的常用誤差轉換函數[14]。 除此之外,將一種新的滑模控制框架與指定性能方法相結合,并通過構造符號之間的關系,證明了系統的穩定性和收斂性。 與現有的指定性能方案[15-17]相比,該設計方法僅依賴于被控對象的輸入輸出測量數據,在提高工業信息利用率的同時,消除了建模所帶來的困擾。
1 問題描述
1.1 非線性系統的動態線性化
考慮下列離散時間非線性系統:
y(k+1)=f(u(k),…,u(k-nu),y(k),…,y(k-ny))
(1)
其中:函數f(·) 代表未知的非線性函數;u(k)和y(k)分別為系統在k時刻的輸入和輸出;nu和ny為它們相應的階數。
假設1 函數f(·)關于系統輸入u(k),u(k-1),…,u(k-nu)的偏導數連續。
假設2 非線性系統(1)滿足廣義利普希茨條件。即對于任意時刻k,若||φ(k)||≠0,則有|Δy(k+1)|≤χ||φ(k)||成立。其中φ(k)=[Δy(k);Δu(k)],Δy(k)=y(k)-y(k-1), Δu(k)=u(k)-u(k-1),χ為一個大于零的常數。
從實際角度來看,假設1描述了常見非線性系統的一般條件,假設2表示系統輸出變化率是受系統輸入變化率限制的,因而上述2個假設具有合理性。基于以上2個假設,引入一個被稱為偽偏導數的時變向量ψ(k)=[ψ(1,k);ψ(2,k)],使得系統(1)被描述為
y(k+1)=y(k)+φT(k)ψ(k)
(2)
考慮以下代價函數:

(3)

(4)

1.2 指定性能函數
考慮以下的離散時間正遞減邊界和光滑函數ρ(k):
追蹤誤差定義為e(k)=yd(k)-y(k),yd(k)為預期軌跡,α和β為2個正數,代表著追蹤誤差的邊界范圍可調。邊界初值ρ(0)>邊界終值ρ(∞)>0,γ∈(0,1)為收斂率。顯然,光滑函數ρ(k)是收斂的。
指定性能控制保證了追蹤誤差維持在預定義的邊界(5)內。在嚴格單調遞增函數Ω(ε(k))中引入變換誤差ε(k),使得
e(k)=ρ(k)Ω(ε(k))
(8)
其中遞增函數Ω(ε(k))對于任意ε(k)∈R有以下性質:
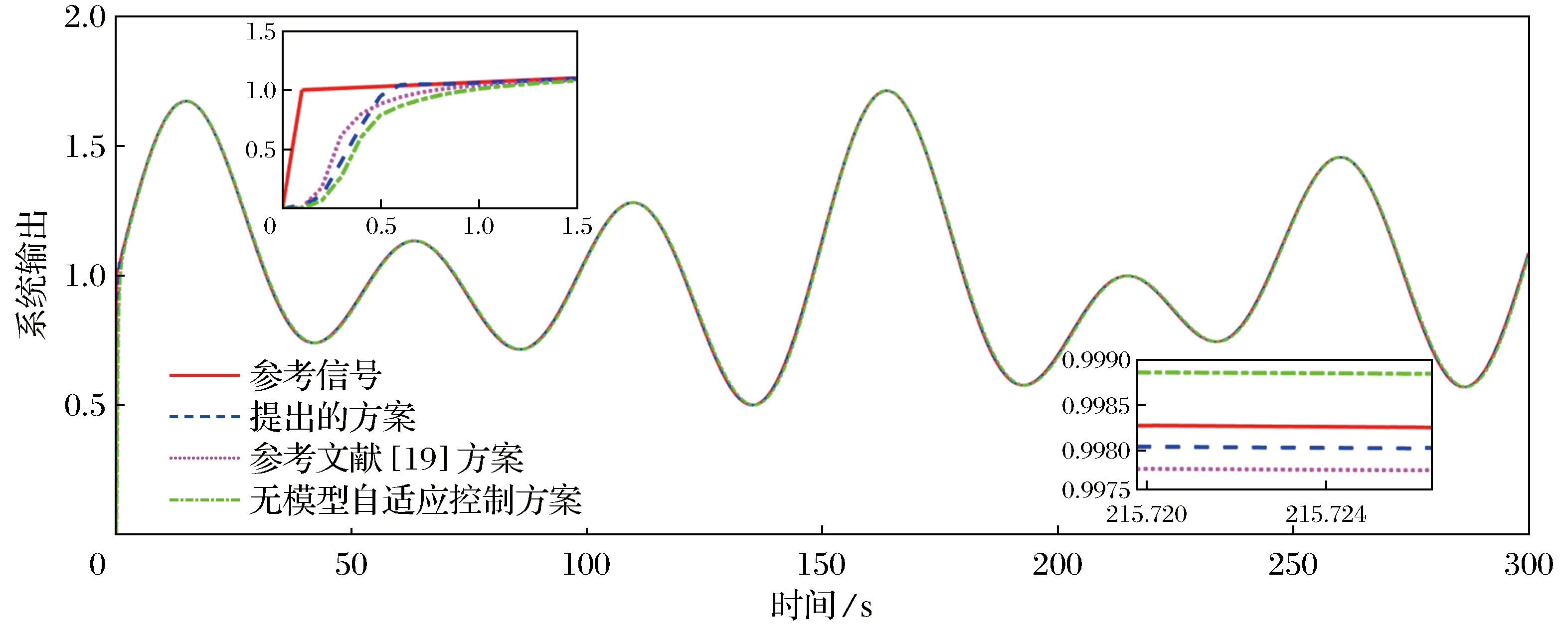
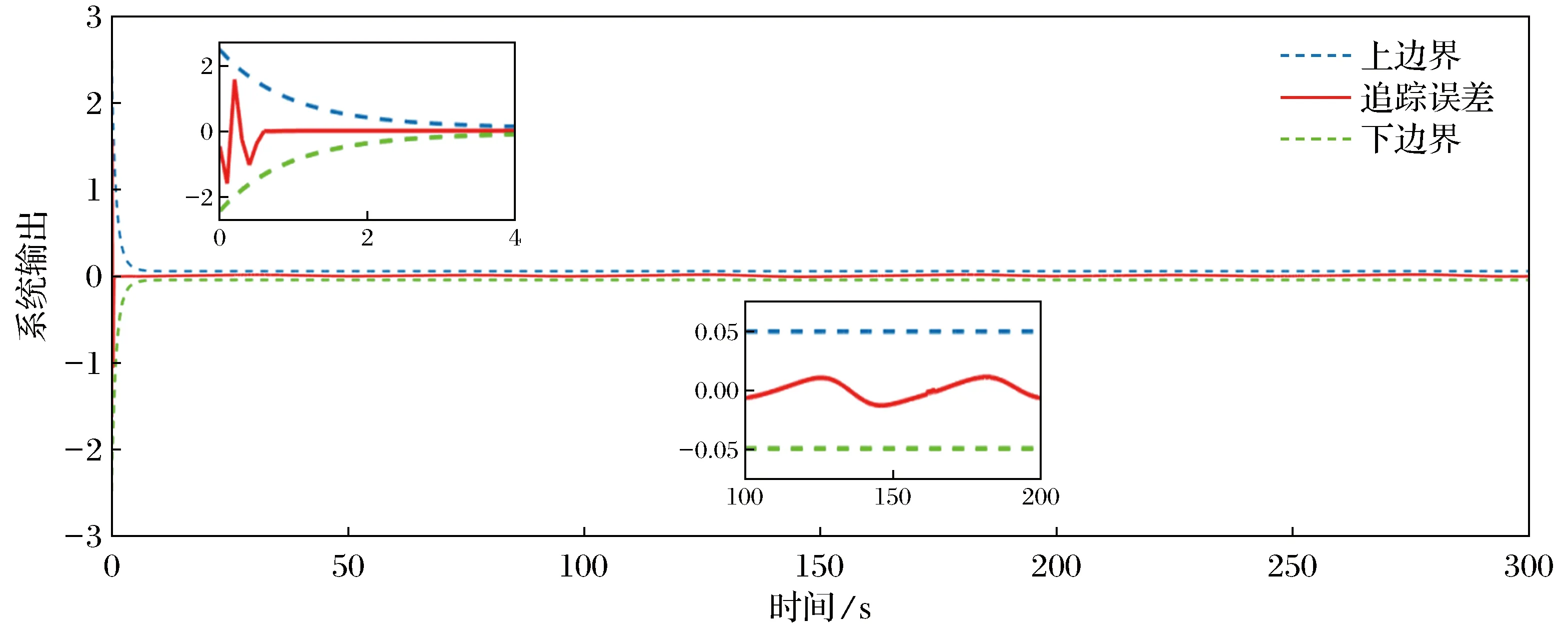
選擇合適的參數初值使得-ρ(0) (9) 因此,ε(k)可以表示為 (10) 當α≠β時,2個可調收斂邊界的參數函數α(k),β(k)調整如下: 其中α(0)和β(0)為α(k)和β(k)的初值,滿足如下條件: 修改后的收斂域和變換誤差函數重新定義為 在接下來的控制器設計中將會使用修改后的約束條件。另外,約束條件(13)和max{·}函數的存在保證了任意時刻下的Ω(ε(k))∈(-1,1)。 此外,參數ρ(0),ρ(∞)和γ是影響控制性能的關鍵因素。參數ρ(0)表示初始階段誤差的基本最大約束值,參數ρ(∞)決定穩態跟蹤誤差的最大允許邊界,參數γ為可調約束邊界的收斂速度。 不同于一般的滑模面,本節對于離散時間非線性系統(1),在如下的滑模面構造中考慮變換誤差ε(k),而不是傳統的追蹤誤差e(k)。 s(k)=s(k-1)+κε(k)-ε(k-1) (15) 其中1<κ<2。在變換誤差式的作用下,式(15)可以進一步表示為 (16) (17) 在趨近律Δs(k+1)=s(k+1)-s(k)的作用下,結合式(16)和式(17),可以推導出如下的等效控制律: (18) u(k)=u(k-1)+ue(k)+us(k) (19) 給出開關控制律us(k)如下: (20) (21) 為方便起見,定義以下函數: (22) 聯立式(16)、式(17)、式(21)和式(22),滑動函數可以更新為 (23) 引理1[18]由正切函數的(2,2)階帕德近似可得以下關系: 定理1 在任意時刻k,θ(k)與ε(k)符號相同,與ε(k+1)符號相反。 再聯立式(17)、式(21)和式(22)可得 (24) (25) 從引理2可以得到 (26) 通過已知的符號關系不難看出ε(k)tan(θ(k))+κ>0恒成立。 將式(25)的兩邊同除以θ(k),再由引理2可推導出以下恒不等式: (27) 對于該不等式,假設θ(k)>0,可知ε(k)/(ε(k)tan(θ(k))+κ)>ε(k+1)。 1) 若ε(k)>0,由于ε(k)tan(θ(k))+κ>0,可以推導出ε(k+1)/ε(k)小于1/(ε(k)tan(θ(k))+κ)的最小值為0。也就是說,此時ε(k)與ε(k+1)符號相反。 2) 若ε(k)<0,同理可以推導出ε(k+1)/ε(k)大于1/(ε(k)tan(θ(k))+κ)的最大值為+∞,此時顯然產生了矛盾。 綜上所述,在θ(k)>0的假設下可知ε(k)>0且ε(k+1)<0。那么在θ(k)<0時,同理可知ε(k)<0且ε(k+1)>0。由此證明了θ(k)與ε(k)符號相同且與ε(k+1)符號相反的結論。 定理2 考慮帶有變換誤差函數(14)和滑模面(15)的離散時間非線性系統(1),滑動變量s(k)可以在控制律(21)的作用下保持在一定區域內,同時變換誤差的有界使得指定的追蹤性能被保證。 證明 首先通過之前構造的符號關系來討論θ(k)與ε(k)之間的大小關系,由式(25)可得 再由1<κ<2和引理2可知:當θ(k)>0時,有θ(k)>ε(k)>0;當θ(k)<0時,有θ(k)<ε(k)<0。 步驟1 由式(23)可知 由于s(k)和θ(k)符號相同且ε(k)tan(θ(k))+κ>0,不難得出Δs(k+1)s(k)<0,這也就意味著若滑動變量s(k)在準滑動域外時,會在接下來的時刻向準滑動域收斂。 步驟2 由之前對ξ(k+1)的定義可得 (28) 定義如下的準滑動域: 當s(k)?Λ時,由步驟1可知滑動變量s(k)會逐漸向準滑動域Λ收斂。當s(k)∈Λ時,由式(23)和上述推導過程可以保證k+1時刻的滑動變量同樣被約束在準滑動域內,即s(k+1)∈A。 回顧公式(15)不難看出ε(k)有界,也就意味著追蹤誤差滿足條件(13)。同時通過式(28)和反正切函數的性質可以進一步給出k+1時刻的追蹤誤差在如下范圍內: -ρ(∞)-τs 綜上,滑動變量s(k)和追蹤誤差e(k)的全局有界性得證。 為了驗證所設計的具有指定性能的無模型自適應滑模控制方案的有效性,考慮如下的離散時間非線性模型: 參考信號選擇為 對控制效果有較大影響的一些參數和初值選擇如下:γ=0.03,γ越大,可調邊界的收斂速度越快;ρ(∞)=0.05,決定著穩定后誤差的約束范圍和跟蹤效果;τs=0.001,與滑模控制的抖顫影響成正比;κ=1.6,對控制的跟蹤精度有一定的影響;ρ(0)=0.5,代表可調邊界的初始值;α(0)=β(0)=5,決定了初始狀態下可調邊界的放大比例;ψ(0)=[1.8;8.2],為偽偏導數時變向量的初始值,影響著整體的控制性能。其他參數選擇為:σ=δ=0.1,μ=λ=1。將所提出的方案與傳統的無模型自適應方案和文獻[19]中的無模型自適應滑模控制方案相比較,在關鍵參數一致的情況下,各控制方案的跟蹤效果如圖1所示,所提出方案的跟蹤誤差約束效果如圖2所示。 圖1 跟蹤效果對比曲線Fig.1 Tracking effect comparison curve 從圖1的控制效果可以看出,3種控制方案均可以起到較好的跟蹤效果,并基本消除了滑模控制所帶來的抖顫影響,而所提出的方案也具有更為優秀的快速性和跟蹤精度。 圖2 跟蹤誤差約束效果Fig.2 Tracking error constraint effect 從圖2的跟蹤誤差約束效果可以看出,提出的方案在所有時刻都可以將追蹤誤差限制在一定范圍內。由此也驗證了所提出的具有指定性能的無模型自適應滑模控制方案的有效性。 本文對于一類離散時間單輸入單輸出系統提出了一種新穎的帶有指定性能的數據驅動自適應滑模控制方案。在無模型自適應控制的框架下,將一種帶有正切型誤差變換函數的指定性能控制方法與滑模控制方法相結合,保證了追蹤誤差在任意時刻都可以收斂到指定的范圍中。通過構造參數符號之間的關系證明了滑動函數的有界性,并仿真驗證了所提出方案的可行性與優越性。未來的研究工作將會考慮多輸入多輸出系統和多智能體系統,并對現有方案進行進一步的優化與加強。
1.3 修改收斂域
2 具有指定性能的無模型自適應滑模控制
2.1 控制器設計






2.2 符號關系的構造






3 控制系統的穩定性分析



4 仿真驗證
5 結 語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38工業設計(2022年8期)2022-09-09 07:43:20軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50數學物理學報(2020年2期)2020-06-02 11:29:24家庭影院技術(2017年9期)2017-09-26 03:41:45光學精密工程(2016年6期)2016-11-07 09:07:19Coco薇(2016年2期)2016-03-22 02:42:52Coco薇(2015年1期)2015-08-13 02:47:34