基于徑向基點(diǎn)插值法的旋轉(zhuǎn)Mindlin 板高次剛?cè)狁詈蟿恿W(xué)模型1)
2022-03-19 01:54:52杜超凡鄭燕龍章定國周曉婷
力學(xué)學(xué)報 2022年1期
杜超凡 * 鄭燕龍 * 章定國 周曉婷 *
* (揚(yáng)州大學(xué)建筑科學(xué)與工程學(xué)院,江蘇揚(yáng)州 225000)
? (南京理工大學(xué)理學(xué)院,南京 210094)
引言
在現(xiàn)代工程領(lǐng)域中,隨著航空航天和民用機(jī)械工程等領(lǐng)域的快速發(fā)展,對柔性多體系統(tǒng)在高速化及大變形工況下的可靠性要求越來越高.許多構(gòu)件如太陽能帆板、風(fēng)力發(fā)電機(jī)葉片、直升機(jī)旋翼及渦輪機(jī)葉片等都屬于柔性構(gòu)件搭載于剛性主體的剛-柔耦合結(jié)構(gòu).這類結(jié)構(gòu)在經(jīng)歷大范圍剛體運(yùn)動的同時還存在著柔性構(gòu)件的變形,且相互耦合,呈現(xiàn)出的動力學(xué)行為十分復(fù)雜.由于對這類經(jīng)歷大范圍運(yùn)動柔性梁的剛-柔耦合動力學(xué)行為的研究比較成熟,因此常將這類板式結(jié)構(gòu)簡化為一維梁進(jìn)行建模分析[1-3].這種簡化往往只適用于長寬比很大的細(xì)長構(gòu)件,對于長寬比相差不大的板式結(jié)構(gòu),如太陽能帆板等這種簡化顯然是不合理的,仿真結(jié)果會有很大誤差,必須用板的理論來建模分析[4-11].從國內(nèi)外學(xué)者研究中發(fā)現(xiàn),對做大范圍運(yùn)動矩形板的研究有兩個共同點(diǎn):一是變形場的離散方法都是假設(shè)模態(tài)法或有限元法[12-13];二是在建模過程中,大都采用忽略剪切變形的薄板理論,同時引入小變形假設(shè),認(rèn)為與非線性耦合項(xiàng)相關(guān)的一些高階項(xiàng)可以直接去掉,并不影響最終結(jié)果.這就導(dǎo)致兩點(diǎn)不足:一是變形場離散方法的單一,在旋轉(zhuǎn)柔性梁的分析中已經(jīng)說明了假設(shè)模態(tài)法的不足[14-15],而有限元法又存在網(wǎng)格畸變和難以構(gòu)造高階形函數(shù)的問題;二是隨著柔性構(gòu)件尺寸、厚度的增大或構(gòu)件材料柔性的增加,被省略的剪切變形和非線性耦合項(xiàng)相關(guān)的高階項(xiàng)的影響將逐漸增大[16-19],必須考慮其影響建立更加精確的高次耦合動力學(xué)模型.陳思佳等[20]考慮了非線性耦合項(xiàng)的高階項(xiàng),建立了既適用于小變形又適用于大變形問題的旋轉(zhuǎn)柔性梁的高次剛?cè)狁詈蟿恿W(xué)模型,彌補(bǔ)了一次近似耦合模型在處理柔性梁大變形問題上的不足.因此,為了得到更精確的仿真結(jié)果,使用新的變形場離散方法和依據(jù)中厚板理論建模[21-23]獲得更精確的動力學(xué)方程將顯得很有必要.無網(wǎng)格法作為一種新的變形場離散方法,已廣泛應(yīng)用于板的靜力學(xué)和自由振動分析中[24-30],但在柔性多體系統(tǒng)領(lǐng)域鮮有報道[31-32].將其應(yīng)用到做大范圍轉(zhuǎn)動的矩形板中,將極大豐富柔性多體系統(tǒng)領(lǐng)域中的變形場離散方法.
本文采用無網(wǎng)格徑向基點(diǎn)插值法(RPIM)描述柔性板的變形場,考慮經(jīng)典薄板理論中被忽略的剪切變形的影響,保留動能中與非線性耦合變形量相關(guān)的高階項(xiàng),同時考慮了板的平動,建立了較為完整的旋轉(zhuǎn)矩形板高次剛-柔耦合動力學(xué)模型.該模型既能處理薄板問題,又能處理中厚板問題,既能處理小變形問題,又能處理大變形問題.將仿真結(jié)果與傳統(tǒng)的假設(shè)模態(tài)法和有限元法對比,表明徑向基點(diǎn)插值法的正確性,同時說明無網(wǎng)格法用于該領(lǐng)域的可推廣性.
1 旋轉(zhuǎn)Mindlin 板動力學(xué)建模
1.1 系統(tǒng)的動能和勢能
圖1 所示為做大范圍運(yùn)動的矩形板模型,其中坐標(biāo)系O-XYZ為慣性坐標(biāo)系,o-xyz為連體坐標(biāo)系,且連體坐標(biāo)系所在平面與薄板未變形的中面重合,其3 個方向的單位矢量分別為e1,e2,e3.板長為L,寬為H,厚度為h,密度為ρ,彈性模型為E,泊松比為μ.

圖1 作大范圍運(yùn)動的矩形板Fig.1 Rectangular plate with large overall motion
P0為變形前板中面上一點(diǎn),變形后移至P點(diǎn),變形位移矢量為u,在連體坐標(biāo)系下各分量為(u1,u2,u3).基于Mindlin 板理論,板中任意一點(diǎn)變形位移矢量為u,在連體坐標(biāo)系下為各分量為(u1,u2,u3).其中縱向位移u1,u2可用板中面上(z=0)的變形u01,u02表示為

式中,w1和w2分別為板中面內(nèi)沿x和y方向的實(shí)際伸長量,為二次耦合變形量,傳統(tǒng)的零次近似模型建立在結(jié)構(gòu)動力學(xué)小變形假設(shè)的基礎(chǔ)上,并沒有考慮二次耦合變形量.φx和 φy分別為橫截面相對于y軸和x軸的轉(zhuǎn)角.任意P點(diǎn)在慣性坐標(biāo)系O-XYZ下的速度矢量可表示為

式中,Vo和 ωA分別為連體坐標(biāo)系相對于慣性坐標(biāo)系的速度和角速度矢量,ρ0為點(diǎn)P0在連體坐標(biāo)系中位置矢量,VPA為P點(diǎn)相對連體坐標(biāo)系的速度矢量.各矢量在連體坐標(biāo)系的分量形式為


將以上各式代入式(2)中,可得

系統(tǒng)的動能為

考慮剪切變形的影響,任一點(diǎn)處的應(yīng)變?yōu)?/p>

對各項(xiàng)同性材料,其應(yīng)力為

系統(tǒng)勢能為

式中,U1和U2分別為板面內(nèi)變形能、板橫向彎曲和剪切變形能,表達(dá)式分別為

1.2 系統(tǒng)的動力學(xué)方程
將問題域離散為若干個節(jié)點(diǎn),將矩形板問題域用N個場節(jié)點(diǎn)表示,如圖2 所示.形函數(shù)由支持域中所包含的節(jié)點(diǎn)形成,具體表達(dá)式在文獻(xiàn)[31]中有詳細(xì)闡述.

圖2 矩形板無網(wǎng)格法離散Fig.2 Meshless discretization of rectangular plates
與薄板理論建模不同,Mindlin 板理論由于考慮橫向剪切應(yīng)力對變形的影響,因此變形前垂直于中面的直法線變形后將變?yōu)榍€,橫截面相對于x軸和y軸的轉(zhuǎn)角不再是薄板理論中撓度u3的一階導(dǎo)數(shù),為獨(dú)立變量,表示為

式中,n為計算點(diǎn)支持域內(nèi)的節(jié)點(diǎn)數(shù),φ1i(x,y),φ2i(x,y),φ3i(x,y) ,φ4i(x,y) ,φ5i(x,y) 為支持域內(nèi)對應(yīng)節(jié)點(diǎn)的形函數(shù),通常令 φji(x,y) (j=1,2,···,5) 相同.q1(t)和q2(t) 為相應(yīng)節(jié)點(diǎn)面內(nèi)縱向變形位移列陣,q3i(t)為相應(yīng)節(jié)點(diǎn)橫向變形及截面轉(zhuǎn)角組成的列陣.對 應(yīng)u3和兩個轉(zhuǎn)角的形函數(shù)行陣及q3i(t) 的表達(dá)式為

為表述方便,以下表達(dá)式中略去自變量x,y,t.
令 Φ4=zφ4,Φ5=zφ5,將式(15)代入式(1),得變量u1,u2及其速度為

式中,H1(x,y)和H2(x,y) 為耦合形函數(shù),表示如下

下標(biāo)中“,”表示對坐標(biāo)求偏導(dǎo)數(shù).







式中,a01,a02,a03為基點(diǎn)加速度在連體坐標(biāo)系下的分量,表達(dá)式為

各常數(shù)陣為



式(24)即為系統(tǒng)的高次剛-柔耦合動力學(xué)方程,該模型既能處理大變形問題又能處理小變形問題,彌補(bǔ)了一次近似模型在處理大變形問題時的不足.其中帶雙下劃線的項(xiàng)是由于考慮了非線性二次耦合變形量的高階項(xiàng)而推導(dǎo)出的.若去掉這些雙下劃線的項(xiàng),則式(24)退化為一次近似模型;若去掉單下劃線的項(xiàng),則退化為零次近似模型.
2 數(shù)值仿真
2.1 剪切閉鎖
當(dāng)使用Mindlin 厚板理論分析薄板問題時,往往會發(fā)生剪切閉鎖現(xiàn)象.為了使推導(dǎo)的動力學(xué)方程能正確仿真薄板問題,應(yīng)首先對剪切閉鎖現(xiàn)象進(jìn)行研究.
考慮如圖3 所示的矩形板,其參數(shù)為:長a=10.0 m,寬b=10.0 m,彈性模量E=1.0 GPa,泊松比μ=0.3,厚度為h.定義一個撓度系數(shù) ξ,表達(dá)式為

圖3 矩形板受力圖Fig.3 Force diagram of rectangular plate

式中,wmax為板的最大撓度值,P為集中力載荷,D為板的彈性剛度,表達(dá)式為

表1 為不同節(jié)點(diǎn)個數(shù)下,使用徑向基點(diǎn)插值法求得的四邊簡支、厚長比h/a=0.01 且中心點(diǎn)受集中力P=100 N 作用的薄板撓度系數(shù).CPT 和FSDT 分別表示經(jīng)典薄板理論和Mindlin 板理論.從表中可知,當(dāng)節(jié)點(diǎn)個數(shù)為17 × 17 左右,可得到與文獻(xiàn)基本相同的解,基于Mindlin 板理論的解比經(jīng)典薄板理論解更精確.在以下仿真中,離散節(jié)點(diǎn)個數(shù)都選取17 ×17.

表1 四邊簡支、中心點(diǎn)受集中力作用的薄板撓度系數(shù) (h/a=0.01)Table 1 Deflection coefficient of thin plates subjected to concentrated force at the center point with SSSS boundary condition (h/a =0.01)
表2 為不同邊界條件的厚長比h/a=0.1,中心點(diǎn)受集中力P=100 N 作用的厚板撓度系數(shù),分別使用經(jīng)典薄板理論(CPT)和Mindlin 板理論(FSDT).為表述方便,做如下規(guī)定,板四邊按左上右下順序排列,簡支邊界用S 表示,固支邊界用C 表示,如SCSC 表示左右邊界簡支,上下邊界固支,SCCS 表示左下簡支,右上固支.從表中可知,基于Mindlin 板理論的結(jié)果與文獻(xiàn)[33]提供的解析解結(jié)果基本一致,且總比基于經(jīng)典薄板理論的結(jié)果大.同時說明經(jīng)典薄板理論只能處理薄板問題,而Mindlin 板理論即可以處理厚板問題,又可以處理薄板問題,并且精度更高,因此具有更廣泛的應(yīng)用價值.

表2 不同邊界條件和受力情況下厚板撓度系數(shù)(h/a=0.01)Table 2 Deflection coefficient with different boundary conditions and forces (h/a=0.1)
當(dāng)板厚度更薄即厚長比更小時,基于Mindlin 板理論將出現(xiàn)剪切閉鎖現(xiàn)象.在有限元法中,通常通過構(gòu)造高階單元形函數(shù)來消除剪切閉鎖現(xiàn)象.根據(jù)這一思想,在無網(wǎng)格法中同樣可以通過構(gòu)造高階形函數(shù)來消除剪切閉鎖現(xiàn)象,而可方便的構(gòu)造高階形函數(shù)正是無網(wǎng)格法的優(yōu)勢,通過添加高階多項(xiàng)式基函數(shù)即可完成.表3 表示受集中力作用,四邊簡支的矩形板在不同厚長比下的撓度系數(shù) ξ .從表中可明顯看出,當(dāng)厚長比小于0.001 時,添加低階多項(xiàng)式的徑向基點(diǎn)插值法出現(xiàn)剪切閉鎖現(xiàn)象,求得的撓度系數(shù)比解析解小很多.當(dāng)添加的多項(xiàng)式為15 和18 項(xiàng)時,可消除剪切閉鎖現(xiàn)象.厚長比為0.000 1 的板是極端情況,現(xiàn)實(shí)中并不存在,因此對于基于Mindlin 板理論的徑向基點(diǎn)插值法,添加15 項(xiàng)多項(xiàng)式基函數(shù)即可消除剪切閉鎖現(xiàn)象.需要注意的是,此時需增大支持域尺寸,否則將導(dǎo)致力矩矩陣不可求逆,支持域的無量綱尺寸通常取為 αs=4.1 .當(dāng)厚長比較大即不發(fā)生剪切閉鎖現(xiàn)象時,添加多項(xiàng)式基函數(shù)對解的精度影響并不大,因此對于中厚板,為提高計算效率,可選擇不添加多項(xiàng)式基函數(shù).圖4 所示為受集中力作用四邊簡支板在不同厚長比下,數(shù)值解與文獻(xiàn)提供的解析解的比值.從圖中可更直觀地看出,當(dāng)厚長比小于0.001 時,添加低階多項(xiàng)式基函數(shù)發(fā)生明顯的剪切閉鎖現(xiàn)象,當(dāng)多項(xiàng)式基函數(shù)為15 和18 項(xiàng)時,可消除剪切閉鎖現(xiàn)象.當(dāng)厚長比較大時,多項(xiàng)式基函數(shù)對結(jié)果影響并不明顯.

圖4 多項(xiàng)式基函數(shù)對剪切閉鎖的影響Fig.4 Influence of polynomial basis function on shear locking

表3 受集中力作用四邊簡支板不同厚長比下的撓度系數(shù)Table 3 Deflection coefficient with different aspect ratios
2.2 大范圍運(yùn)動已知的動力學(xué)仿真
考慮如圖5 所示的作定軸轉(zhuǎn)動的中心剛體-矩形懸臂板,與中心剛體固連.中心剛體以角速度 ω 繞y軸旋轉(zhuǎn),板的材料參數(shù)為:長度a=1.828 8 m,寬度b=1.219 2 m,厚度h=2.54 mm,彈性模量E=70 GPa,密度ρ=2000 kg/m3,泊松比取0.3,中心剛體半徑R取0.ω1=ω3=0, ω2=ω , ω˙1=ω˙3=0 ,ω˙2=,給定的角速度規(guī)律為
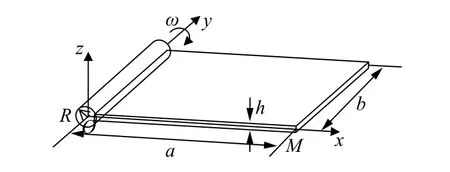
圖5 作定軸轉(zhuǎn)動矩形薄板Fig.5 Configuration of rotating cantilever plate

式中,T=30 s .
圖6 為Ω=20 rad/s 時,本文方法與參考文獻(xiàn)[6]中矩形薄板外側(cè)角點(diǎn)M的橫向變形位移歷程的對比.從圖中可以看出,本文RPIM 的仿真結(jié)果與參考文獻(xiàn)的仿真結(jié)果高度吻合,驗(yàn)證了本文動力學(xué)模型的正確性.圖7 所示分別為 Ω=0.2 Hz和Ω=0.75 Hz時板外側(cè)角點(diǎn)M的橫向變形.從兩圖中可以看出,當(dāng)轉(zhuǎn)速較低時,零次近似模型、一次近似模型和高次模型的差別并不大,但零次近似模型的最大值比一次近似模型和高次模型的稍大.當(dāng)轉(zhuǎn)速較高時,零次近似模型與另兩種模型出現(xiàn)很大區(qū)別.零次近似模型結(jié)果發(fā)散,仿真失敗,而一次近似模型和高次模型結(jié)果收斂,且仿真結(jié)果高度吻合.這與旋轉(zhuǎn)柔性梁中的分析結(jié)論相同,說明零次近似模型忽略耦合變形量存在建模理論的缺陷,其剛度陣隨著轉(zhuǎn)速的增大而減小,產(chǎn)生動力柔化效應(yīng),這也是造成在轉(zhuǎn)速較低時其變形比一次近似模型大的原因.而一次近似模型和高次模型考慮了耦合變形量,其剛度陣隨著轉(zhuǎn)速的增大而增大,產(chǎn)生動力剛化效應(yīng),符合實(shí)際情況,同時也說明本文所建高次模型的正確性.進(jìn)一步研究發(fā)現(xiàn),對于大范圍運(yùn)動已知的情況,隨著轉(zhuǎn)速的增加,高次模型并沒有比一次近似模型優(yōu)越,相反使計算效率降低很多.因此對于該類問題的研究優(yōu)先選用一次近似模型.

圖6 外側(cè)角點(diǎn)橫向變形比較Fig.6 Comparison of lateral deformation of outer corner point M

圖7 矩形薄板外側(cè)角點(diǎn)的橫向變形Fig.7 Lateral deformation of outer corner point M
圖8 為 Ω=0.2 Hz 時使用不同離散方法獲得的一次近似模型板外側(cè)角點(diǎn)M的橫向變形,其中假設(shè)模態(tài)法和有限元法基于經(jīng)典薄板理論,徑向基點(diǎn)插值法基于Mindlin 板理論.有限元法分別使用8 ×4 個矩形單元和2 × 8 × 4 個三角形單元,徑向基點(diǎn)插值法離散為16 × 8 個節(jié)點(diǎn).從圖中可看出,各離散方法的仿真結(jié)果基本一致.圖8(b)為勻速轉(zhuǎn)動階段的局部放大圖,同樣可看出各離散方法的響應(yīng)頻率及振幅基本一致.圖9 為 Ω=0.2 Hz 時使用不同離散方法獲得的一次近似模型板外側(cè)角點(diǎn)M的橫向變形速度.如圖所示,各離散方法的仿真結(jié)果基本一致,從局部放大圖中可知,大范圍運(yùn)動轉(zhuǎn)速恒定時的速度響應(yīng)頻率和振幅也基本一致.

圖8 矩形薄板外側(cè)角點(diǎn)橫向變形(Ω=0.2 Hz)Fig.8 Lateral deformation of outer corner point M(Ω=0.2 Hz)

圖9 矩形薄板外側(cè)角點(diǎn)橫向變形速度(Ω=0.2 Hz)Fig.9 Lateral deformation rate of outer corner point M(Ω=0.2 Hz)
圖10 為 Ω=0.75 Hz 時使用不同離散方法獲得的一次近似模型板外側(cè)角點(diǎn)M的橫向變形.從圖中可看出,各方法的仿真結(jié)果基本一致.圖10(b)為勻速轉(zhuǎn)動階段的局部放大圖,各方法的響應(yīng)振幅和頻率并沒有 Ω=0.2 Hz 時吻合的好,但也相差不大.其中假設(shè)模態(tài)法、三角形單元有限元法的仿真結(jié)果最吻合,徑向基點(diǎn)插值法的響應(yīng)振幅最大,而矩形單元有限元法響應(yīng)振幅最小.從縱坐標(biāo)的數(shù)量級來看,這種差別是極微小的,都能滿足實(shí)際的工程需要.圖11為 Ω=0.75 Hz 時使用不同離散方法獲得的一次近似模型板外側(cè)角點(diǎn)M的橫向變形速度.同樣的,各方法的仿真結(jié)果基本一致.圖11(b)為勻速轉(zhuǎn)動階段的局部放大圖,如圖所示,與橫向變形的局部放大圖中的變化相同,我們可得出同樣的結(jié)論.

圖10 矩形薄板外側(cè)角點(diǎn)橫向變形(Ω=0.75 Hz)Fig.10 Lateral deformation of outer corner point M(Ω=0.75 Hz)
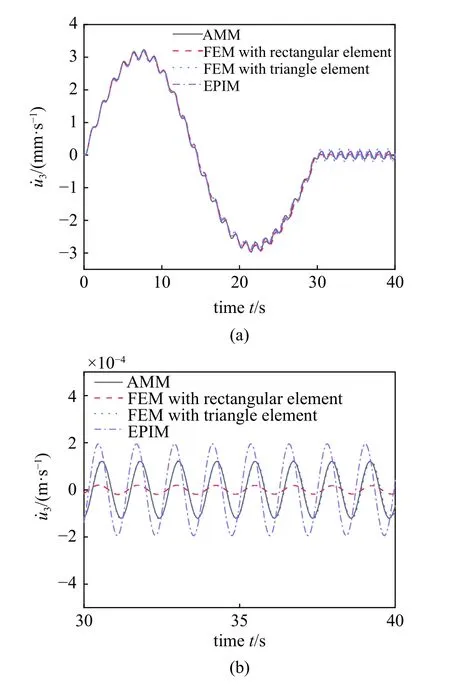
圖11 矩形薄板外側(cè)角點(diǎn)橫向變形速度(Ω=0.75 Hz)Fig.11 Lateral deformation rate of outer corner point M(Ω=0.75 Hz)
圖12 為 Ω=10 Hz 時使用不同離散方法獲得的一次近似模型板外側(cè)角點(diǎn)M的橫向變形.從圖中可看出,仿真結(jié)果在10 s 之前基本一致.隨著仿真時間的增加,有限元法結(jié)果發(fā)散,計算失敗.而徑向基點(diǎn)插值法結(jié)果收斂,體現(xiàn)了無網(wǎng)格法計算上的優(yōu)勢.

圖12 矩形薄板外側(cè)角點(diǎn)橫向變形(Ω=10 Hz)Fig.12 Lateral deformation of outer corner point M(Ω=10 Hz)
圖13 為在三維空間轉(zhuǎn)動的矩形板,矩形板固結(jié)于一繞Y軸作定軸轉(zhuǎn)動的中心剛體上.慣性坐標(biāo)系O-XYZ的原點(diǎn)O和矩形板連體坐標(biāo)系o的距離r=0.2 m.連體坐標(biāo)系中單位方向矢量e1和e2分別和未變形矩形板長度和寬度平行,e3垂直于矩形板中面.(e1,e2,e3)可由慣性坐標(biāo)系O-XYZ經(jīng)過三次繞軸旋轉(zhuǎn)獲得,3 個歐拉角和系統(tǒng)所有參數(shù)與文獻(xiàn)[6]相同.圖14 為Ω=10 rad/s 時,矩形板外側(cè)角點(diǎn)P橫向變形同文獻(xiàn)[6]對比圖,從圖中可以看出,本文的仿真結(jié)果與參考文獻(xiàn)的仿真結(jié)果高度吻合,驗(yàn)證了本文動力學(xué)模型處理三維算例的正確性.

圖13 三維空間轉(zhuǎn)動板Fig.13 Rotating plate in 3-D

圖14 矩形薄板外側(cè)角點(diǎn)P橫向變形(Ω=10 rad/s)Fig.14 Lateral deformation of outer corner point P(Ω=10 rad/s)
2.3 大范圍運(yùn)動未知的動力學(xué)仿真
板的材料參數(shù)為:長度a=1.0 m,寬度b=0.5 m,厚度h=2.5 mm,彈性模量E=70 GPa,密度ρ=3000 kg/m3,泊松比取0.3,中心剛體半徑R取0.假定施加在中心剛體繞y軸方向的外力偶矩為

其中,T=2 s.
圖15 所示分別為τ0=5 N·m 和τ0=70 N·m 時一次近似模型和高次模型板外側(cè)角點(diǎn)M的橫向變形.從兩圖中可以看出,當(dāng)τ0=5 N·m 時,一次近似模型和高次模型的仿真結(jié)果高度吻合,此時柔性板外側(cè)角點(diǎn)最大變形位移約為0.03 m,屬于小變形,說明兩種模型均適于小變形情形.當(dāng)驅(qū)動力偶矩τ0=70 N·m,一次近似模型結(jié)果發(fā)散,仿真失敗,而高次模型仿真結(jié)果仍然收斂.此時柔性板外側(cè)角點(diǎn)最大變形位移約為0.4 m,對于長為1 m 的板而言屬于大變形.由此可知,對于大變形情形,一次近似模型并不適用,而高次模型仍然適用.同時也說明二次耦合變形量的高階項(xiàng)在大變形情形下尤為重要,不能忽略.

圖15 矩形薄板外側(cè)角點(diǎn)橫向變形Fig.15 Lateral deformation of outer corner point M
3 結(jié)論
本文采用無網(wǎng)格徑向基點(diǎn)插值法描述柔性板的變形場,基于一階剪切變形理論,保留動能中有關(guān)非線性耦合項(xiàng)的高階量,通過構(gòu)造高階形函數(shù)避免了徑向基點(diǎn)插值法出現(xiàn)剪切閉鎖的現(xiàn)象,建立了能處理不同厚長比的作大范圍運(yùn)動矩形板的高次剛-柔耦合動力學(xué)模型.通過靜力學(xué)算例驗(yàn)證避免剪切閉鎖方法的正確性.分別運(yùn)用假設(shè)模態(tài)法、有限元法和徑向基點(diǎn)插值法及兩種板的建模理論對作定軸轉(zhuǎn)動的中心剛體與懸臂板的動力剛化問題進(jìn)行動力學(xué)仿真,其仿真結(jié)果與已有文獻(xiàn)一致,說明本文徑向基點(diǎn)插值法建立的模型是正確的,也說明了在同等條件下,無網(wǎng)格法具有計算上的優(yōu)勢.比較了傳統(tǒng)的零次近似模型、一次近似模型和高次模型之間的差異,發(fā)現(xiàn)傳統(tǒng)的零次近似模型只能適用于轉(zhuǎn)速很低的情況,適用范圍狹窄,而一次近似模型和高次模型既適用于低轉(zhuǎn)速又適用于高轉(zhuǎn)速的情況,證明了考慮耦合變形量的必要性.研究發(fā)現(xiàn),高次模型由于考慮了非線性耦合變形項(xiàng)的高階量,相對于一次近似模型,計算效率降低很多,因此仿真時優(yōu)先選用一次近似模型;一次近似模型只適用于小變形情況,而高次模型既適用于小變形情況,又適用于大變形情況.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
小學(xué)生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數(shù)學(xué)小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(2016年12期)2016-12-26 21:37:36
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
