星基ADS-B監(jiān)視性能評估軟件設計與實現(xiàn)
2022-03-18 05:01:06王鳳鑫劉海濤李保國
計算機應用與軟件 2022年3期
關鍵詞:水平
王鳳鑫 劉海濤 李保國 孫 沂
1(中國民航大學電子信息與自動化學院 天津 300300)2(中星中航通用航空產(chǎn)業(yè)投資有限公司 云南 昆明 650211)3(民航安徽空管分局 安徽 合肥 230041)
0 引 言
星基廣播式自動相關監(jiān)視系統(tǒng)(星基ADS-B)是實現(xiàn)廣域范圍內(nèi)航空器監(jiān)視的主要技術手段[1]。2014年MH370航班失聯(lián)事件后,為解決傳統(tǒng)陸基監(jiān)視系統(tǒng)無法實現(xiàn)陸地偏遠地區(qū)、海洋及南北兩極航空器監(jiān)視覆蓋的問題,國際民航組織(ICAO)提出了星基監(jiān)視的概念,將ADS-B接收機部署于低軌道衛(wèi)星中,并利用多顆低軌道衛(wèi)星形成覆蓋全球的星基ADS-B系統(tǒng)。與傳統(tǒng)的陸基監(jiān)視系統(tǒng)相比,星基ADS-B系統(tǒng)具有覆蓋范圍廣、不受地理環(huán)境限制、可滿足航空器持續(xù)監(jiān)視等多方面優(yōu)勢[1,7]。
2008年德國航空航天中心提出了星基ADS-B的概念,并于2013年5月發(fā)射了首顆搭載ADS-B接收機的PROBA-V實驗衛(wèi)星,驗證了星基ADS-B技術的可行性[2];2013年11月丹麥GomSpace公司發(fā)射GomX-1實驗衛(wèi)星,用于低軌衛(wèi)星ADS-B信號的接收實驗[3];2015年9月,國防科技大學發(fā)射了“天拓三號”實驗衛(wèi)星,基于該實驗衛(wèi)星開展星基ADS-B信號接收方面的研究[3];2018年美國Aireon公司Iridium-NEXT 66顆在軌衛(wèi)星部署完成[4],并于2019年4月在北大西洋上空全面投入運行,提供星基ADS-B數(shù)據(jù)服務。
為解決星基ADS-B系統(tǒng)監(jiān)視性能指標評測問題,參考EUROCONTROL相關技術規(guī)范[8],設計實現(xiàn)星基ADS-B監(jiān)視性能評估軟件。首先闡明了監(jiān)視性能評估技術指標及評估方法,隨后介紹了星基ADS-B監(jiān)視性能評估軟件的總體架構、數(shù)據(jù)接入與處理模塊、航跡顯示模塊及監(jiān)視性能評估模塊的設計思路,最后利用“天拓三號”實驗衛(wèi)星數(shù)據(jù),對星基ADS-B系統(tǒng)監(jiān)視性能評估軟件進行測試。
1 相關研究
目前國內(nèi)外航空監(jiān)視系統(tǒng)性能評估軟件分為兩類,一類針對空管自動化系統(tǒng)監(jiān)視性能進行評估,如EUROCONTROL的SASS-C,通過導入多源監(jiān)視數(shù)據(jù)并對數(shù)據(jù)進行重構得到參考數(shù)據(jù),再將評估數(shù)據(jù)與參考數(shù)據(jù)比較判斷其是否符合EUROCONTROL當前監(jiān)視性能標準,適用范圍較廣,局限性在于需要多種監(jiān)視數(shù)據(jù)作為參考數(shù)據(jù)源,且授權、維護費用較高[5];第二類是以雷達系統(tǒng)評估為主的專用評估工具,如Intersoft-Electronics公司開發(fā)的RASS系列工具和FAA開發(fā)的RBAT,能夠?qū)走_系統(tǒng)進行深入的分析,但不適用于星基ADS-B系統(tǒng)[6]。
在星基ADS-B系統(tǒng)監(jiān)視性能評估方面,尚無明確的國際標準。文獻[2]提出了目標檢測概率、目標識別概率等性能參數(shù)的評估方法,對PROBA-V衛(wèi)星載荷于北大西洋、太平洋等越洋航線上的監(jiān)視性能進行評估;文獻[4]給出載荷覆蓋范圍、可用性、傳輸延遲、更新間隔等性能參數(shù)評估方法,對銥星系統(tǒng)相關性能進行評估;文獻[7]通過將“天拓三號”實驗衛(wèi)星下傳位置數(shù)據(jù)與航路中心線比較,證明了星基ADS-B航跡數(shù)據(jù)誤差符合正態(tài)分布。
2 監(jiān)視性能評估方法
參照空管自動化系統(tǒng)監(jiān)視數(shù)據(jù)接入最低標準[8],同時結合國內(nèi)星基ADS-B實驗系統(tǒng)的條件[3,9],從水平位置、氣壓高度、航跡速度三方面,給出星基ADS-B系統(tǒng)更新概率、更新間隔、目標丟失概率、航跡誤差的統(tǒng)計方法。
2.1 測量間隔
測量間隔(Measurement interval,MI)用于評估監(jiān)視系統(tǒng)數(shù)據(jù)項更新概率,而非監(jiān)視性能評估參數(shù)[8]。根據(jù)星基ADS-B系統(tǒng)主要應用于洋區(qū)、極地、偏遠地區(qū)的特點,執(zhí)行最低水平間隔5海里評估標準,設置MI為8 s[11]。
2.2 水平位置/氣壓高度更新概率
水平位置/氣壓高度更新概率(Probability of update,PU)定義為監(jiān)視系統(tǒng)在每一個規(guī)定的測量間隔內(nèi)提供目標水平位置/氣壓高度有效數(shù)據(jù)的概率[8],以水平位置為例,其統(tǒng)計方法如下:
1) 以水平位置起始點為首個測量間隔中心,按規(guī)定測量間隔對航跡進行時間分割,分割方法如圖1所示。

圖1 水平位置更新概率示意圖
2) 計算當前航跡測量間隔的總數(shù)量NT。
3) 計算測量間隔中存在有效水平位置數(shù)據(jù)項的測量間隔數(shù)量NR。其中有效數(shù)據(jù)判斷標準為:(1) 數(shù)據(jù)項具備正確的目標身份標識;(2) 數(shù)據(jù)項具備正確的時間信息;(3) 在水平間隔為5海里空域時,水平位置誤差小于2 100 m;(4) 在垂直間隔最低標準2 000英尺空域時,氣壓高度誤差小于300英尺。
4) 按式(1)計算單航跡水平位置更新概率PU:
(1)
5) 計算監(jiān)視系統(tǒng)覆蓋范圍內(nèi)整體水平位置更新概率PUA,如式(2)所示,其中N為監(jiān)視系統(tǒng)覆蓋范圍內(nèi)的航跡總數(shù)。
2.3 目標丟失概率
目標丟失概率定義為監(jiān)視系統(tǒng)連續(xù)丟失目標位置消息的概率[8]。如圖2所示,當兩個連續(xù)的完整目標報告時間間隔大于26.4 s(MI×3×110%)時,目標處于丟失狀態(tài)。
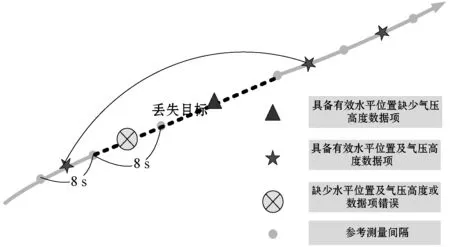
圖2 目標丟失示概率示意圖
對于星基ADS-B系統(tǒng),完整的目標報告應具備有效水平位置和氣壓高度。目標丟失概率RG計算方法如下:
首先,計算監(jiān)視系統(tǒng)覆蓋范圍內(nèi)航跡的測量間隔總和NA,如式(3)所示:
(3)
然后,計算目標丟失概率RG,如式(4)所示:
(4)
式中:NG為每次目標丟失所占的測量間隔數(shù)量;g為目標丟失發(fā)生的頻數(shù)。
2.4 水平位置誤差均方根
水平位置誤差(Horizontal position error)定義為目標水平位置測量值與相應的水平位置參考值間的二維歐氏距離[8],式(5)為水平位置誤差均方根(Root-Mean-Square,RMS)的計算公式:
(5)
式中:n為水平位置總數(shù);E為水平位置誤差。速度矢量、氣壓高度誤差均方根的統(tǒng)計方法與水平位置相同。
2.5 更新間隔
更新間隔(Update Interval,UI)定義為監(jiān)視系統(tǒng)連續(xù)兩次正確接收目標位置消息的時間間隔[9]。更新間隔統(tǒng)計方法如下:
計算相鄰兩條ADS-B位置消息的更新間隔TUI,如式(6)所示:
TUI=ti-ti-1
(6)
式中:ti為該目標第i條位置消息的正確接收時刻;ti-1為該目標第i-1條位置消息的正確接收時刻。
根據(jù)EUROCAE相關技術規(guī)范,在低密度航線上(Low-Density En-Route),空中交通管制系統(tǒng)要求位置消息的更新間隔以96%概率小于8 s[13],按式(7)計算96%的位置消息更新間隔T96%:
P(TUI≤T96%)=96%
(7)
3 軟件框架設計
星基ADS-B監(jiān)視性能評估軟件是集數(shù)據(jù)接收、解析、處理、存儲、顯示、監(jiān)視性能指標評估于一體的自動化信息處理系統(tǒng)。軟件基于面向?qū)ο蠓椒ㄔO計,采用Visual Studio 2017開發(fā)平臺,基于MFC建立人機交互界面,其總體框架設計如圖3所示。

圖3 星基ADS-B監(jiān)視性能評估軟件總體架構
軟件由數(shù)據(jù)接入處理模塊,監(jiān)視性能評估模塊及航跡顯示模塊組成。數(shù)據(jù)接入及處理模塊用于完成星基ADS-B數(shù)據(jù)的接入、解析、數(shù)據(jù)融合及存儲工作。航跡顯示模塊用于實現(xiàn)星基ADS-B監(jiān)視性能評估軟件地理信息繪制及航跡顯示功能。監(jiān)視性能評估模塊完成空中位置、速度矢量更新概率、更新間隔、誤差均方根、目標丟失概率等監(jiān)視性能指標統(tǒng)計分析及顯示功能。
4 功能模塊設計
4.1 數(shù)據(jù)接入與處理模塊
數(shù)據(jù)接入與處理模塊由數(shù)據(jù)接收、消息解析、數(shù)據(jù)更新、數(shù)據(jù)存儲四個單元構成。
數(shù)據(jù)接收單元負責接入衛(wèi)星向地面?zhèn)魉偷脑糀DS-B消息,接入方式為消息記錄文件導入或ADS-B地面接收機TCP通信傳輸。采用多個獨立接入線程共享內(nèi)容緩沖區(qū)的方式來實現(xiàn)數(shù)據(jù)共享與傳輸,保證了星基ADS-B數(shù)據(jù)的實時接入及處理。
消息解析單元對接入的每條ADS-B消息進行解析。星基ADS-B系統(tǒng)采用DF-17數(shù)據(jù)編碼標準,對航班某一時刻速度、位置、航班號等狀態(tài)信息單獨編碼為112 bit的數(shù)據(jù)幀進行下傳[12]。該單元首先記錄消息接收時間,然后進行CRC校驗、并按照RTCA DO260-B標準[12]進行消息解析。
數(shù)據(jù)融合單元將解析結果融合為航班飛行狀態(tài),解決方法為創(chuàng)建包括消息接收時間、ICAO地址碼、消息類型、航班號、空中位置、速度、航向、導航完整類別在內(nèi)的數(shù)據(jù)緩沖區(qū),消息解析完畢后根據(jù)ICAO地址碼查找該航班上一時刻飛行狀態(tài),替換相應數(shù)據(jù),實現(xiàn)數(shù)據(jù)融合。
數(shù)據(jù)存儲單元將數(shù)據(jù)處理結果存入數(shù)據(jù)庫,數(shù)據(jù)庫采用Microsoft SQL Sever以滿足大量數(shù)據(jù)管理的需求,采用ADO(ActiveX Data Objects)對象實現(xiàn)對數(shù)據(jù)庫的訪問,通過調(diào)用自定義存儲過程完成數(shù)據(jù)表的創(chuàng)建、刪除等數(shù)據(jù)整理工作。
4.2 地理信息及航跡顯示模塊
地理信息及航跡顯示模塊用于實現(xiàn)軟件背景地圖和目標航跡的顯示,顯示內(nèi)容包括行政區(qū)域、河流、航路、鐵路、危險區(qū)、近進區(qū)等。軟件啟動時預先加載Shapefile文件作為地理信息數(shù)據(jù)來源,采用MFC的CDC類實現(xiàn)圖形繪制功能,基于消息映射機制實現(xiàn)地圖拖動、縮放等功能。
實現(xiàn)地理信息及航跡的繪制需要將繪制點的大地坐標轉(zhuǎn)換為屏幕顯示坐標,解決方法為首先采用墨卡托投影完成大地坐標與平面坐標的轉(zhuǎn)換,再將投影直角坐標系按照地圖比例尺轉(zhuǎn)換為屏幕坐標系即可得到屏幕顯示坐標[14-15]。
4.3 監(jiān)視性能評估模塊
監(jiān)視性能評估為軟件的核心功能,該模塊首先通過讀取數(shù)據(jù)庫信息得到航班相關飛行狀態(tài)記錄,隨后采用卡爾曼濾波對原始航跡數(shù)據(jù)進行處理,得到參考航跡,以此完成監(jiān)視性能的評估工作,最后以直方圖和統(tǒng)計數(shù)據(jù)的方式顯示統(tǒng)計結果。
監(jiān)視性能評估流程如圖4所示,選擇需要評估的航班,根據(jù)ICAO地址在數(shù)據(jù)庫中檢索該航班當天所有航行狀態(tài)記錄,篩選出空中位置消息和速度消息,根據(jù)速度消息對航行狀態(tài)進行分類,判斷依據(jù)為:(1) 當縱向速度大于等于每分鐘200英尺且小于等于每分鐘8 000英尺時,航班處于爬升/下降狀態(tài);(2) 當橫向加速度大于等于1.5 m/s2時,航班處于轉(zhuǎn)彎狀態(tài)。式(8)給出了橫向加速度為1.5 m/s2時角速度W(單位:°/s)與速度V(單位:節(jié))的關系[8]:

圖4 監(jiān)視性能評估流程
W=1.67/V
(8)
為評估星基ADS-B系統(tǒng)航跡誤差,需要得到參考航跡,軟件基于卡爾曼濾波算法,根據(jù)前一時刻目標狀態(tài)估計值和當前時刻測量值對當前時刻狀態(tài)進行最優(yōu)估計,得到參考航跡[16],以水平位置為例,計算流程如圖5所示。

圖5 參考位置點建立流程
由于卡爾曼濾波適用于線性、離散系統(tǒng),星基ADS-B系統(tǒng)輸出的水平位置所在坐標系為WGS84坐標系,速度矢量信息所在坐標系為平面直角坐標系,需要對位置信息進行坐標轉(zhuǎn)換。采用大地主題解算的方法,以首個空中位置點為平面直角坐標原點,根據(jù)前兩點大地坐標求出前兩點大地線長及方位角,推算第二個空中位置點平面直角坐標,以此類推完成坐標轉(zhuǎn)換,且誤差檢核結果在10-16~10-12之間,可以有效避免坐標系轉(zhuǎn)換帶來的誤差[17]。
4.4 圖形界面設計
為更加直觀地顯示監(jiān)視性能評估結果,設計了支持人機交互的可視化圖形界面,如圖6-圖9所示,分別展示了軟件界面、航行情報顯示界面、航跡顯示界面和評估結果可視化界面。
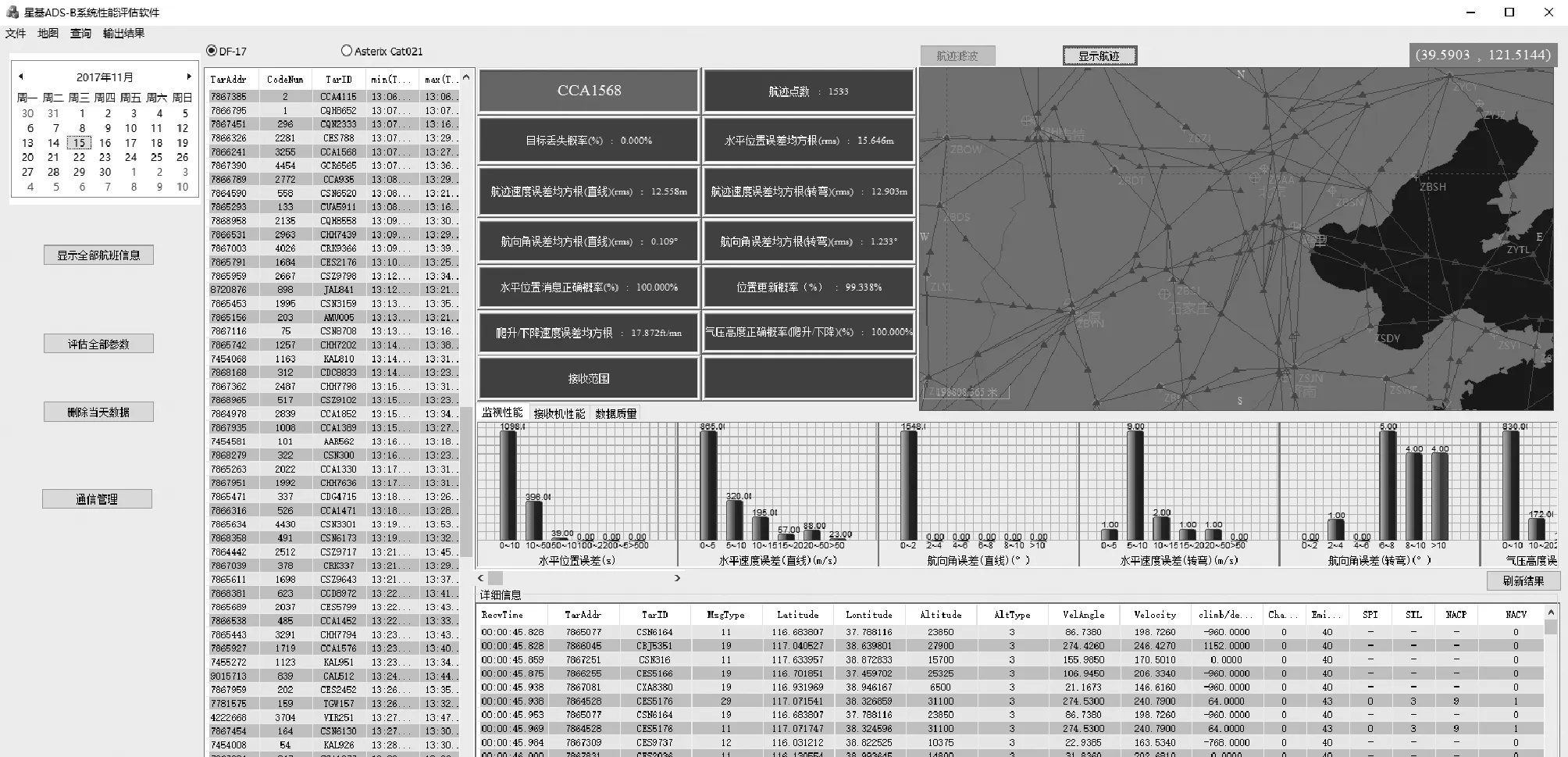
圖6 星基ADS-B監(jiān)視性能評估軟件界面

圖7 航行情報顯示

圖8 航跡顯示界面
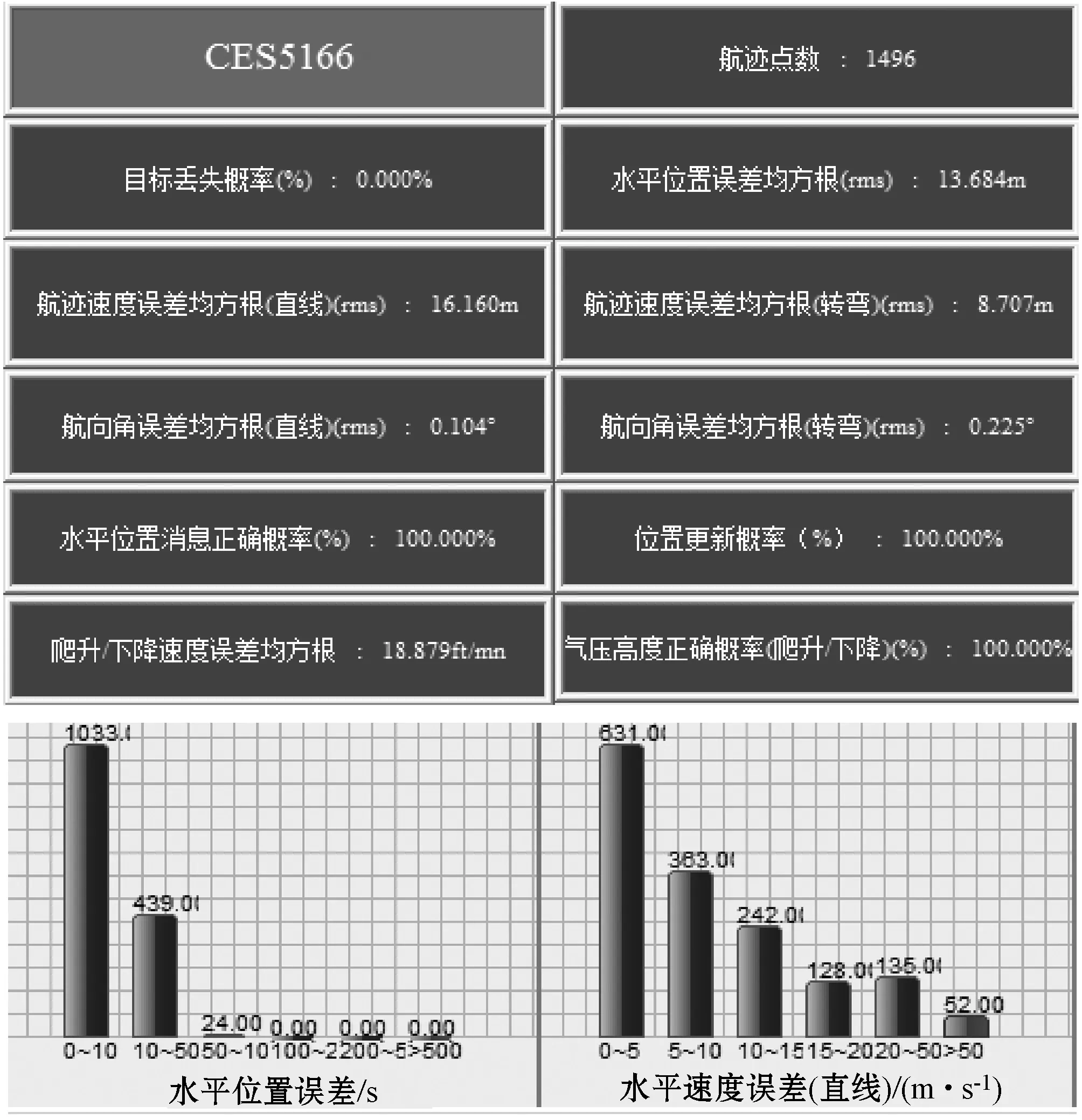
圖9 評估結果可視化界面
圖7顯示為航行情報信息表格,每一行容納一架航班消息統(tǒng)計信息并實時刷新,ICAO地址、接收消息數(shù)量、航班號、監(jiān)視起始時間、監(jiān)視結束時間按列分別顯示。圖8顯示為地理信息、航班原始航跡、參考航跡。圖9以直方圖和統(tǒng)計數(shù)據(jù)的方式顯示監(jiān)視性能評估結果,其中直方圖的橫軸為監(jiān)視性能參數(shù)范圍,縱軸為在此范圍內(nèi)的消息數(shù)量。
5 應用驗證
采用國防科技大學“天拓三號”衛(wèi)星數(shù)據(jù)開展星基ADS-B系統(tǒng)監(jiān)視性能評估工作。對衛(wèi)星下傳數(shù)據(jù)進行解析,效果如圖10所示。

圖10 “天拓三號”衛(wèi)星下傳數(shù)據(jù)顯示
為分析星基ADS-B系統(tǒng)對越洋航班的監(jiān)視能力,選取衛(wèi)星接收機2016年10月23日下傳數(shù)據(jù)中途經(jīng)大西洋的7架航班航行情報進行統(tǒng)計分析,統(tǒng)計結果如表1所示。

表1 “天拓三號”實驗數(shù)據(jù)評估結果
可以看出,在單載荷覆蓋范圍下,星基ADS-B系統(tǒng)對航班的平均監(jiān)視時間為134 s;在監(jiān)視時間內(nèi),7架航班位置消息更新概率大于97%、水平位置誤差均方根小于550 m,均滿足ATM系統(tǒng)5海里間隔監(jiān)視性能標準[8]。
為評估星基ADS-B系統(tǒng)在單載荷覆蓋范圍下的監(jiān)視性能,對“天拓三號”2016年10月17日至24日下傳數(shù)據(jù)進行整理,篩選出位置消息數(shù)量大于50的航跡共4 281條,統(tǒng)計每條航跡水平位置均方根誤差及位置更新間隔,匯總統(tǒng)計結果如圖11、圖12所示。

圖11 水平位置誤差均方根誤差分布

圖12 位置更新概率分布
可以看出,在7日數(shù)據(jù)匯總統(tǒng)計圖中水平位置誤差均方根小于550 m。位置更新概率大于90%的比例為76.9%。
6 結 語
針對星基ADS-B系統(tǒng)監(jiān)視性能評估需求,參考民航現(xiàn)有標準設計實現(xiàn)星基ADS-B監(jiān)視性能評估軟件,并利用“天拓三號”實驗數(shù)據(jù)對監(jiān)視性能評估軟件進行測試。
測試結果表明:(1) 單顆衛(wèi)星載荷覆蓋范圍下,水平位置誤差均方根小于550 m,滿足ATM系統(tǒng)5海里間隔監(jiān)視性能標準;(2) 7日數(shù)據(jù)匯總統(tǒng)計中,位置更新概率大于90%的比例為76.9%,表明在單顆衛(wèi)星載荷覆蓋下,星基ADS-B系統(tǒng)存在航空器位置消息接收數(shù)量不足的問題。
猜你喜歡
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
火花(2019年12期)2019-12-26 01:00:28
人大建設(2019年6期)2019-10-08 08:55:48
人大建設(2019年12期)2019-05-21 02:55:32
雜文月刊(2018年21期)2019-01-05 05:55:28
人大建設(2017年6期)2017-09-26 11:50:44
學苑創(chuàng)造·A版(2015年11期)2016-01-14 09:03:27
俄羅斯問題研究(2012年1期)2012-03-25 09:54:45
中國火炬(2010年12期)2010-07-25 13:26:22
中國火炬(2010年8期)2010-07-25 11:34:30