城市交通信號定時控制和感應控制的應用
2022-03-18 09:24:07于明寶張耀王麗麗
交通科技與管理 2022年4期
于明寶 張耀 王麗麗


摘要 城市交通擁堵程度與人民群眾幸福指數密切相關,文章以城市交通信號定時控制和感應控制作為研究對象,介紹了交通信號控制系統硬件結構,分析了各種控制方式的優勢與不足。針對定時控制和感應控制應用的問題進行了分析,結果表明,在交通高峰時,經過優化的TOD固定配時控制方案是最有效的控制策略;在交通在低峰時,采用全感應或半感應是最有效的信號控制策略。
關鍵詞 交通信號;擁堵;定時;感應
中圖分類號 U491.4文獻標識碼 A文章編號 2096-8949(2022)04-0001-03
0 引言
隨著車輛、城市人口的持續增加,城市的道路變得更加擁擠,需要通過科學的方法實現對交通信號的有效控制。通過協調控制交通信號控制可以減輕突發性交通事件的影響,充分發揮交通控制和管理作用,最大限度方便行人通行、合理分配路權、有效控制互相沖突交通流、有效管理大交通流量的交叉口。
1 智能交通信號機
智能交通信號機在交通信號燈、信息展示屏、停車位誘導屏、車輛檢測與測速器的控制與管理上應用,可與控制中心平臺相連接,實現區域管控和交通優化,是“物聯網”智慧城市交通系統的重要組成部分。智能交通信號機系統核心結構如圖1。
智能交通信號機的核心功能共分為五個層次:核心層、控制層、文件及設備驅動層、外設層、輔助層。
2 交通信號控制方法
交通信號控制方法可以分為:定時控制、感應控制和自適應控制三種。其系統硬件結構如圖2。
定時控制(固定配時控制)主要依據交通歷史數據,分別就周內日或特殊假日不同時段的交通需求建立不同的配時方案,雖能兼顧不同時段的交通需求,卻易忽略時段內交通需求的變化,常造成綠燈時間的不足或損失[1]。
感應控制是在路口各方向靠近停止線的地方設置車輛檢測器,交通信號機接收車輛檢測器發送的車流信息,針對路口實際交通狀況,對單點路口或干道綠波帶做合理交通信號控制,從而實現合理的相位控制、最小的時間損失、節能環保的目標。交通信號機處理所有車輛檢測器輸入信息,確認紅燈時是否有車輛在等待或綠燈延長時間時的交通需求,并大致可分為半感應和全感應兩種控制方式。能更有效地利用綠燈時間,達到路口交通效益最大的目標。
自適應控制把交通系統看作一個不確定系統。通過測量車流量、停車次數、延誤時間和排隊長度等狀態量反饋來實現信號配時的動態優化調整。
3 半感應控制
半感應控制是針對次要道路或左轉相位執行交通需求的信號管制,只有在確實有交通需求(次要道路或左轉相位有車輛申請)時才將通行權開放給次要道路或左轉相位,如此可使綠燈時間經常開放給交通量較高的主要道路,但若次要道路考量到行人過街時,則次要道路須維持每周期有最短綠燈時間方便行人通行,唯在感應相位有車輛申請時,綠燈時間是依車輛多寡來延長,其綠燈時間最多延長至所設定的最長綠燈時間值;當感應相位無車輛申請時,若不考量行人時則執行感應相位跳躍,減少綠燈時間的損失。
4 全感應控制
全感應控制比較適合應用于單點控制路口,因為交叉路口上的信號燈的管制配時,是由信號機根據路口各臨近路段上的交通需求進行開放綠燈顯現時間,也就是各相位時間是由信號機依據各臨近路段上的實際交通量以靈活的微調配時,而不需要考量到綠波帶續進控制。
感應控制所依據主要的控制參數為信號機所設定的“最小綠燈時間、最長綠燈時間及單位延長時間、延遲時間”;最小綠燈時間在于確保綠燈始亮時,在車輛檢測區至停止線的車輛及欲過街道的行人均能安全通過路口。執行感應控制的相位在執行最小綠燈時間結束后,再根據車輛的感應間距,配合單位延長時間,延長綠燈時間至最長綠燈時間結束該相位綠燈燈號,或當紅燈相位有車輛申請時,同時感應相位前后車輛間距時間大于單位延長時間亦須結束綠燈燈號。
5 定時控制和感應控制的應用
5.1 行人過街控制
當交通量相當高且相鄰兩路口間距相當長,行人過街又屬必要時,可設置協調式路段行人過街感應控制。其運行方式如下:
(1)平常干道維持綠燈,當有行人感應申請時,干道須經過設定的最短綠燈時間后,執行如下運算及分析再決定是否開放行人綠燈:現行配時方案執行時間若是屬干道相位時間,則仍維持干道綠燈,直到干道綠燈時間結束。現行配時方案執行時間若是屬行人過街相位時間,則分析其剩余時間;若大于行人過街相位最短綠燈時間,則結束干道相位綠燈,開放行人過街相位綠燈。現行配時方案執行時間若是屬行人過街相位時間,則分析其剩余時間;若小于行人過街相位最短綠燈時間,則仍維持干道綠燈,等下一周期才開放行人過街相位綠燈。
(2)干道有最短綠燈時間保護,必須等到最短綠燈時間結束,才能運算分析是否開放行人過街相位綠燈。
(3)行人通行最長綠燈時間是依行人步速(1.2 m/s),路寬,行人激活誤差等因素推算。
行人過街相位綠燈時間=最后通過的行人起步延誤時間(≥5 s)+(路寬÷行人過1.2 m/s)-黃燈時間
(4)為與前后相鄰路口協調控制,其配時周期與前后相鄰路口的一致。
5.2 公交優先感應控制
公交優先感應控制采用主動式控制方式,借助檢測器及通信技巧,如果有公交被檢測到時,對具有通行權限的車輛,保持其行進方向的綠燈狀態;如果該方向綠燈即將結束,控制系統通過檢測器采集的信息,判斷該路口是否還有公交車輛通過。對在紅燈相位到達的公交,系統能在現行綠燈相位經過最短綠燈時間后,立即將現有紅燈切換,提前開啟公交優先綠燈以保障公交通行。
要達到快速公交系統準點控制須解決的是路口信號的延誤與停靠站區服務時間的延誤,影響快速公交系統旅行時間的主要因素為行駛速度、停站延誤與信號延誤。行駛速度的差異主要是快速公交系統駕駛的駕車習慣與反應時間,由于其變異難以估算,一般將其忽略不計;在停站延誤部分,影響停站延誤的因素相當多,而在快速公交系統特性的營運之下,會使停站服務時間產生較大的變異無非就是上下車乘客數量的多少,使得快速公交到站的時間無法精確掌握,造成管理上相當不便。
車輛檢測系統是交通控制中采集車流信息的主要工具,由于公交運行路權形態具備公交專用道及混合運行形態,若采用一般車輛感應檢測器僅能適用于具有公交專用道的路口,但若需同時解決混合車流情況下,檢測器須采用較先進的設備(如:車載機),才能正確檢測公交到達及一般車輛的信息。
5.3 環島路口信號控制
5.3.1 環島信號控制問題
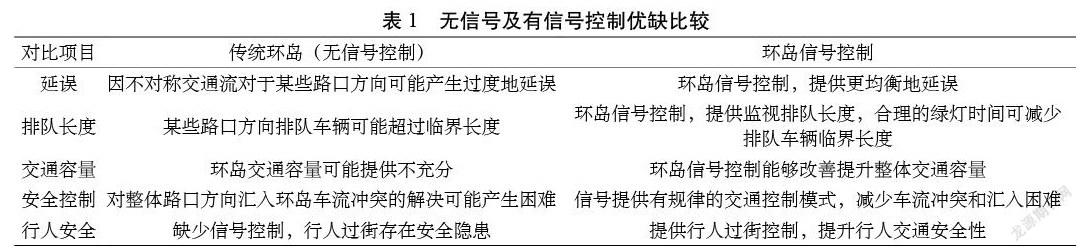
環島路口原是避免使用信號控制的一種有效的路口交通控制方式,但隨著環島路口交通量的增長,并且超過某一臨界值時,尤其在交通擁堵時段常因環內來自不同的入口車流比率,造成直行與左轉車輛沖突而形成嚴重的交通擁堵,致使行人及自行車在安全上產生問題;環島路口裝置信號控制,在交通管理上主要功能在于解決環內因車流轉向產生沖突干擾所引起的交通擁堵,進而提升交通容量及行人、自行車交通安全。無信號及有信號控制優缺比較見表1。
5.3.2 環島交通改善方法
四岔道環島信號控制:為解決環內車流交織區及沖突點,通常在環內畫上左轉專用停止線及裝置信號燈,左轉車輛在停止線等候綠燈,避免與直行車輛沖突,信號相位控制采用兩相位環內遲閉控制方式用以清除環內排隊車輛;遲閉時間是由交通流量及可存放的排隊車輛數來決定。如果兩對向車流不對稱或五岔道以上時,亦可采多相位環內遲閉控制方式,若是有些岔道車流不多,該車道可改為單行道[2]。
環島路口通常位于重要干道交會處,所以在交通控制中心協調控制下:可采用臨界路口控制策略疏解其飽和流量,避免環島某一臨近路段的擁堵而造成群組或整個路網的交通癱瘓。在臨界路口控制模式下,環島信號控制脫離干道協調控制,采用獨立路口運作,用于增加臨界路段的疏解流量減少擁堵程度。通常交控中心依據車輛采集的交通數據來分析、判斷路口的擁堵狀況、各流向的交通需求量,再由交控中心下傳新的配時方案控制環島信號。
6 結論
交通設計和信號控制是疏解交通問題及改善交通現狀有效的技術措施。在交通高峰時期,經過優化的TOD固定配時控制方案是最有效的控制策略。TOD方案是根據控制中心對近期交通流量的趨勢經優化產生并下載到信號機執行的運行方案。在交通低峰時采用全感應或半感應是最有效的信號控制策略。感應控制適用于非重現性交通擁擠,交通量高低相差比較懸殊而變化無定的交叉路口。城市交通信號控制系統與先進公交系統、先進車輛控制系統等相互之間的結合則是更深入的課題。
參考文獻
[1]劉智勇. 智能交通控制理論及其應用[M]. 北京:科學出版社,2003.
[2]陳學文. 城市快速路匝道優化控制策略與方法研究[D].長春:吉林大學, 2008.