復雜電網下基于CSDFT-MAF-PLL的電壓同步方法
2022-03-17 03:27:00陳偉,何山,2
電力系統及其自動化學報 2022年3期
陳 偉 ,何 山 ,2
(1.新疆大學電氣工程學院,烏魯木齊 830049;2.可再生能源發電與并網控制教育部工程研究中心,烏魯木齊 830049)
以風電、光伏為代表的新能源發電并網運行,需準確獲取電網電壓的相角、頻率和幅值等信息,以提升系統故障恢復時間及并網能力[1-2]。鎖相環PLL(phase-locked loop)作為并網的關鍵環節,直接影響電力轉換系統的穩定性與可靠性[3],其快速精準的鎖相能力對電力電子裝置并網具有十分重要的作用。
同步旋轉坐標系鎖相環SRF-PLL(synchronous reference frame PLL)在電力電子和電力系統中應用廣泛[4-5],理想電網下,能快速準確地提取相位信息;復雜電網下,需降低鎖相環帶寬,以提高諧波抑制能力,但響應速度下降[6]。文獻[7]提出SRFPLL存在相位與頻率檢測緊密耦合問題,諧波或任何類型的故障失衡引起的誤差嚴重影響鎖相性能。文獻[8]提出附加前置解耦單元的準一階鎖相環,結合級聯延遲消去法,增強系統抗諧波能力,該前置濾波環節只適合頻率波動小的系統,復雜電網條件下效果不佳。
為克服SRF-PLL在抑制直流分量及諧波方面的不足,文獻[9]利用解耦雙同步參考坐標系鎖相環DDSRF-PLL(decoupled double SRF-PLL)提取三相電壓正、負序分量,利用解耦模塊消除擾動,但該方法結構復雜,給系統帶來一定延遲。
為克服DDSRF-PLL結構復雜和延遲問題,文獻[10]提出雙二階廣義積分器鎖相環DSOGI-PLL(double second-order generalized integrator PLL),電網畸變程度低時,能快速有效鎖定相位,但在含直流偏置及多次諧波等復雜電網下,提取的同步信號會出現較大波動。
為克服DSOGI正交信號發生器DSOGI-QSG(DSOGI-quadrature signals generator)在復雜電網下提取同步信號困難問題,文獻[11]提出結構簡便、濾波程度高的滑動平均濾波鎖相環MAF-PLL(moving average filter PLL),滑窗寬度的選取基準直接影響濾波效果及動態特性。為克服該弊端,文獻[12]提出雙滑動平均濾波鎖相環,并附加角頻率重構模塊以消除鎖相誤差,該滑窗寬度設置較大,提升了動態特性,但該鎖相環設計只針對單相系統。
滑動離散傅立葉算法SDFT(sliding discrete Fourier transform)是諧波測量中使用最廣泛的算法之一。電力系統的諧波成分通常是時變的,特別是在較長傳輸距離的弱配電網中,直接進行頻譜分析會由于泄漏和柵欄效應導致結果不準確。文獻[13]針對SDFT頻譜泄漏問題,提出建立泄漏狀態下的相角或幅值關系,間接計算電網頻率,但復雜系統對關系式本身會造成影響。
針對上述問題,文中設計思路如下:首先,為解決常規SDFT容易出現頻譜泄漏問題,提出固定滑窗-變滑窗結構的級聯型滑動離散傅立葉變換方法,后級SDFT滑窗寬度依據實時檢測的電網頻率調整,利用DFT相角特性,生成每一相虛擬正交信號,提取基波信號;其次,設計附加相位補償MAF正、負序分離模塊,既能準確濾除負序分量,又能避免因MAF階數過高造成的相位延遲;最后,仿真驗證方法有效性。
1 復雜電網多故障誤差分析
以SRF-PLL為例,分析系統在出現三相電壓不平衡、含直流偏移及多次諧波分量下的動態性能。假設:
(1)輸入信號為理想三相正弦波;
(2)在變量發生變化之前,系統已達到穩態;
(3)推導過程在時域下進行,系統視為零狀態系統。
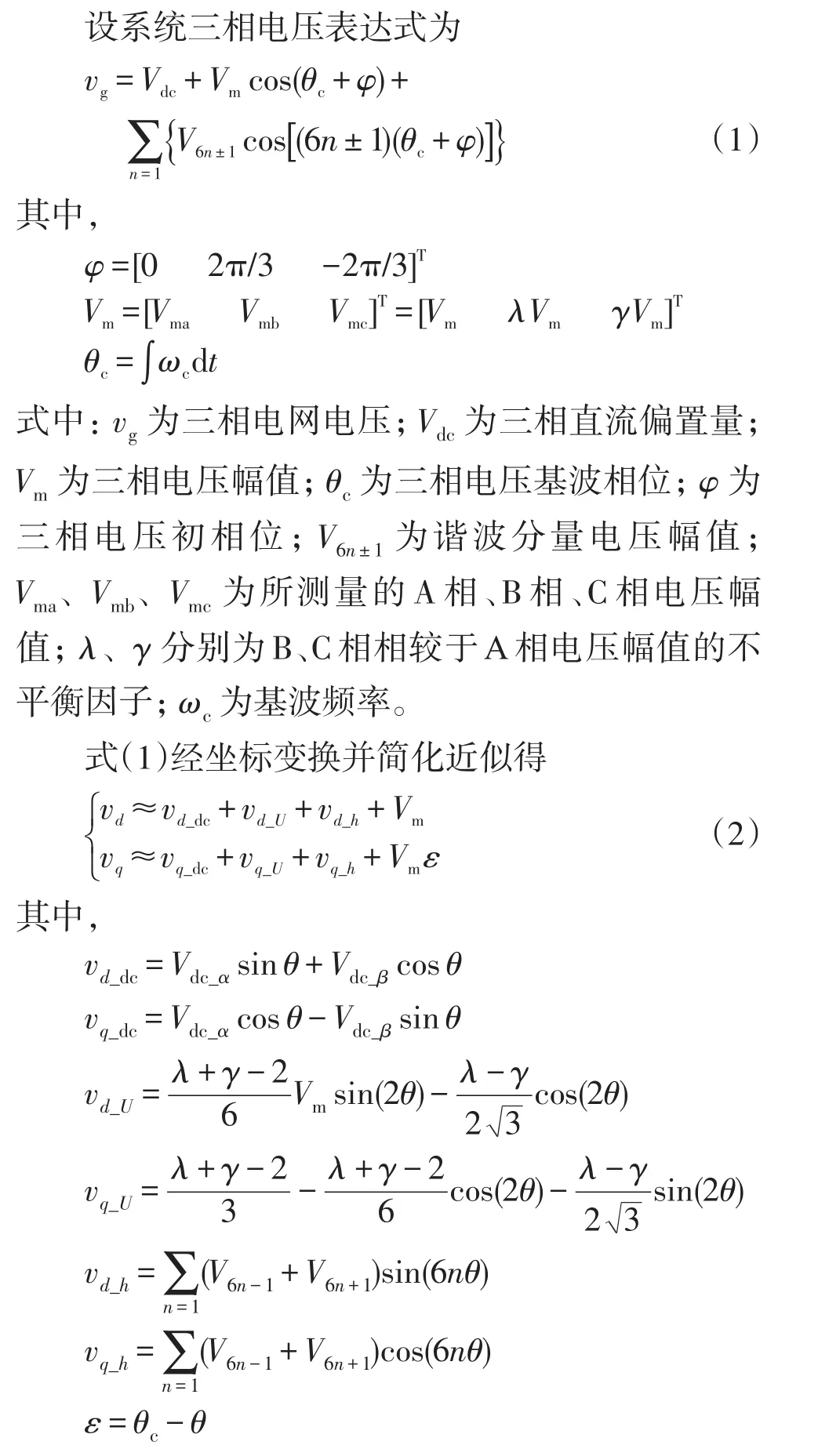
式中:vd、vq為 d、q坐標下電壓分量;vd_dc、vq_dc為直流偏移分量在d、q坐標下產生的電壓分量;vd_U、vq_U為電壓相位不平衡在d、q坐標下產生的電壓分量;vd_h、vq_h為諧波分量在d、q坐標下產生的電壓分量;Vdc_α、Vdc_β為α、β坐標下直流偏移分量;θ為檢測的三相電壓相位角;ε為相位誤差。
由式(2)可知:由直流偏移引起的誤差具有與電網電壓相同的頻率分量;三相電壓不平衡誤差分量為2倍頻擾動分量;電網非3倍奇次諧波分量會產生6倍頻擾動誤差。理想電網下,三相電壓信號通過坐標變換轉換為dq坐標下的電壓分量,SRFPLL對信號進行處理,可快速精確地跟蹤相位,但其結構無法克服在三相電壓不平衡、含直流偏移及多次諧波污染下的擾動誤差。
2 CSDFT-QSG頻率自適應設計
2.1 CSDFT-QSG設計
DFT算法可提取電網輸入信號中的基波信號,消除鎖相外環中的諧波分量及直流分量,但需要計算完整一個周期才更新一次數據。基于樣本數據的相似性,由前一階段窗口函數的頻譜特性所生成的遞推關系,可推算出當前時刻的頻譜。SDFT算法依據固定窗口隨時間滑動提取樣本數據[14]。
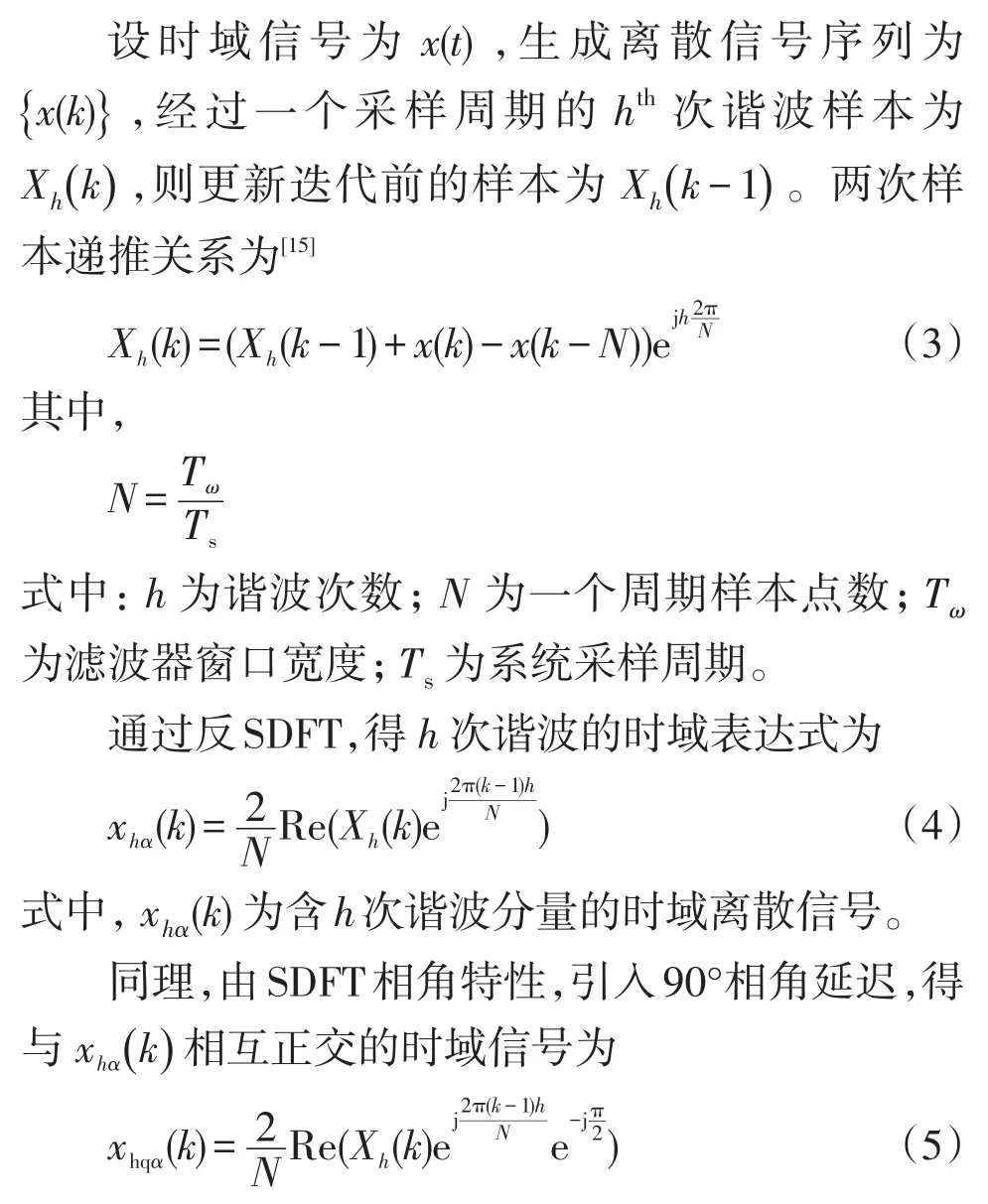
由式(4)、(5)可知,輸入電網電壓信號,生成其虛擬正交信號,提取基波信號,具體結構如圖1所示。
圖1 SDFT-QSG結構Fig.1 Structure of SDFT-QSG
圖1中,vα(k) 、vqα(k)為前級結構輸出的虛擬正交信號。
由式(3)~(5)得SDFT-QSG的z域傳遞函數為[16]
傳遞函數伯德圖如圖2所示。
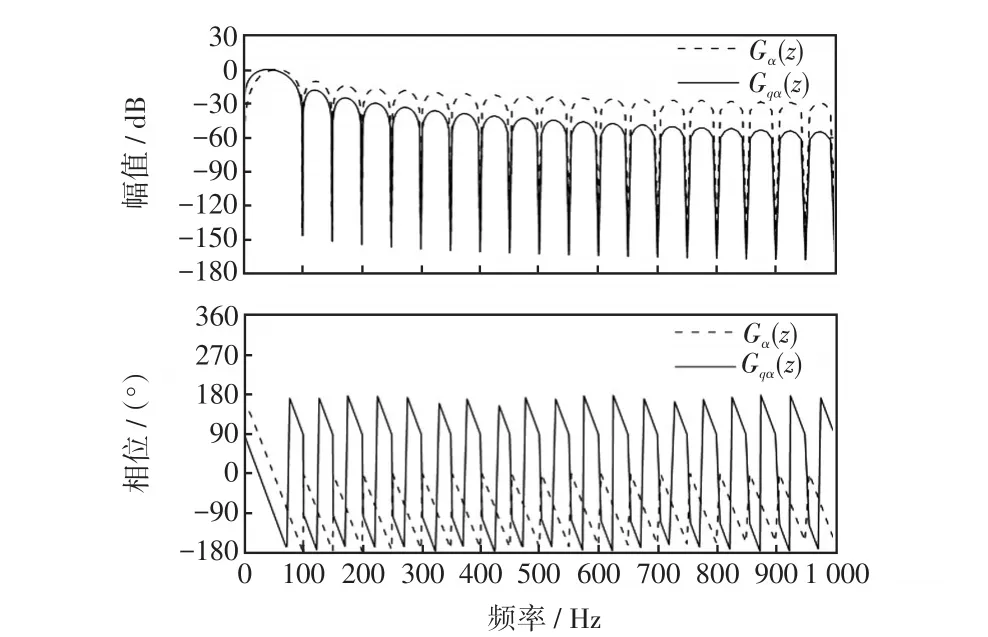
圖2 SDFT-QSG伯德圖Fig.2 Bode diagram of SDFT-QSG
由圖2可知:SDFT-QSG在指定頻率處,幅值增益衰減大,理論上可完全濾除畸變電網下多次諧波及直流偏移分量。
由文獻[15]可知,若SDFT采樣頻率非電網電壓基波頻率的N倍,系統將會發生頻譜泄漏,影響采樣精度,且SDFT-QSG提取的基波信號也會產生偏差,諧波與直流分量無法完全消除,系統會存在穩態誤差。
針對此問題,設計一種固定滑窗寬度-變滑窗寬度相結合機制的級聯型滑動窗離散傅立葉變換結構。
由圖2可知,vα(k)在基波頻率處與v(k)同相位,故以 vα(k)作為后級設計輸入端,其結構如圖3所示。
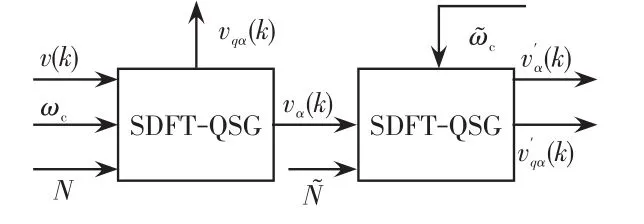
圖3 CSDFT-QSG結構Fig.3 Structure of CSDFT-QSG
2.2 后級頻率自適應設計
由式(3)可知,通過改變樣本周期點數N和系統的采樣周期Ts都可改變濾波器的窗口長度Tω,以達到后級SDFT-QSG頻率自適應。改變系統采樣周期,需每次周期迭代時,都依據電網電壓反饋的實時頻率更新采樣頻率 fs,數字處理器需要較大存儲空間,實現復雜。故此,采用更新樣本周期點數N,即

實際采集到的電網頻率通常不是整數,即使為整數,經式(7)運算,N也可能不為整數,需要進行取整運算,實現過程為

2.3 SDFT-QSG動態性能分析
經前文分析,前級SDFT采樣點數N取128,SDFT-QSG對諧波及直流偏移分量的抑制能力強。由文獻[15]可知,系統動態響應能力與樣本點數密切相關,樣本點數越大,系統動態響應速度越慢,這與鎖相環快速精準的鎖相能力相悖,故需要驗證SDFT結構動態性能。SOGI-QSG為常規正交信號發生器,具有較好的諧波抑制能力與動態響應能力,但對直流偏移分量抑制不佳。對SDFT與SOGI進行階躍響應對比,驗證SDFT的動態響應能力、抑制直流偏移能力。仿真結果如圖4所示。結果表明,SOGI-QSG的α與qα信號動態響應時間均優于SDFT,但SDFT也在一個基波周期20 ms達到穩態。SDFT-QSG的α與qα信號超調量較低,且穩態輸出為零,能夠較好地濾除直流偏移分量;而SOGIQSG的qα信號穩態輸出不為零,無法濾除直流偏移分量,其α與qα信號都存在穩態誤差。綜合考量,SDFT-QSG動態性能更優。
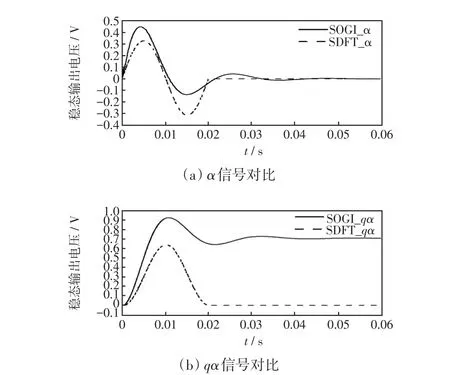
圖4 動態響應對比Fig.4 Comparison of dynamic response
3 MAF正、負序分量分離設計
不平衡電網電壓存在負序分量,將SDFT-QSG提取到的正交信號代入正、負序分量計算模塊PNSC(positive negative sequence calculator)原則上可消除負序分量,但電網畸變程度高將導致SDFT頻譜泄漏嚴重,PNSC交叉分解矩陣會導致相位檢測出現嚴重波動,影響頻率精度,故設計滑動平均濾波方法進行正、負序分離。
3.1 MAF原理分析
滑動平均濾波器MAF(moving average filter)的離散域傳遞函數為[11]

式中:Nm為MAF采樣點數(也稱濾波器階數),Nm=Tωmfsm,Tωm為MAF窗口寬度,其大小既影響濾波性能,又影響系統動態響應速度,Tωm越大,MAF濾波效果越好,但動態響應速度越慢;fsm為滑動平均濾波器采樣頻率。
取 Nm=100,fsm=10 kHz,則Tωm=0.01 s,相應的伯德圖如圖5所示。
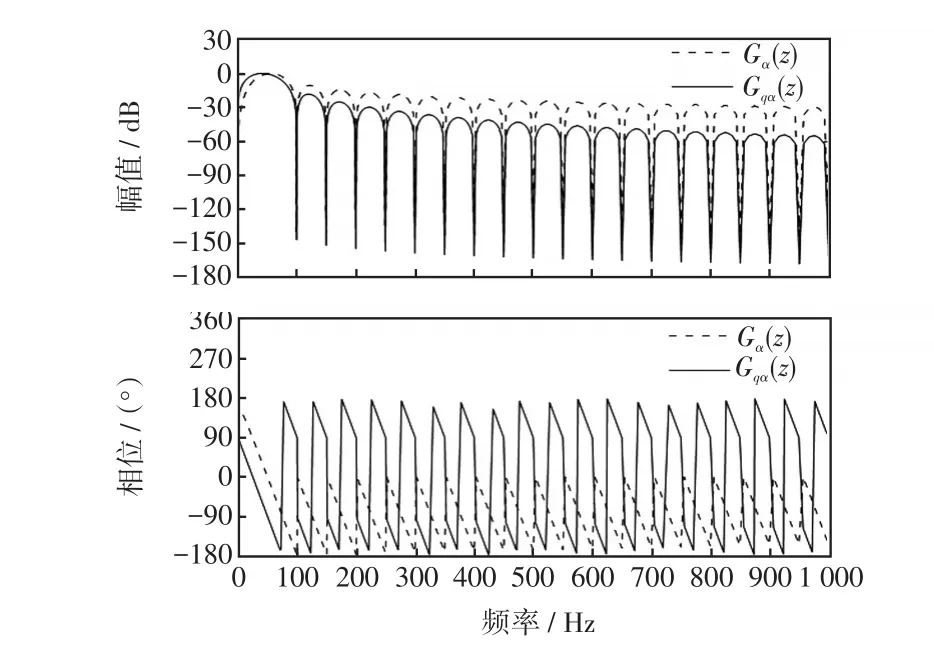
圖5 MAF伯德圖Fig.5 Bode diagram of MAF

式中,Tsm為MAF采樣周期。
由式(10)及圖5可知,MAF可抑制特定頻次的諧波分量,但對直流分量無抑制作用。
3.2 電壓負序分量擾動分析
設αβ兩相靜止坐標系下的電壓表達式為

式中:U+、U-分別為正、負序基波電壓幅值;φ-為負序分量相對正序分量的初始相位角。
對式(11)進行Park變換,得dq兩相旋轉坐標系下的電壓表達式為

當鎖相環鎖定電網電壓正序分量旋轉位置時,即θ=ωct,式(12)改寫為

由式(13)可知:經坐標變換,正序分量轉化為直流分量,負序分量轉化為2倍頻分量。畸變電網下,負序分量對鎖相環產生較大擾動,使其無法準確檢測出正序分量相位信息。
3.3 負序分量消除設計
由上述分析,欲滿足精準鎖相的條件是:uq=0,而MAF對直流分量無抑制作用,故不會干擾系統判斷。負序分量通過坐標變換轉化為2倍頻分量,設計的核心是衰減100 Hz處頻率,由圖5可知,在100 Hz處,增益為-160 dB,滿足既定要求。
MAF負序分量消除原理如圖6所示。
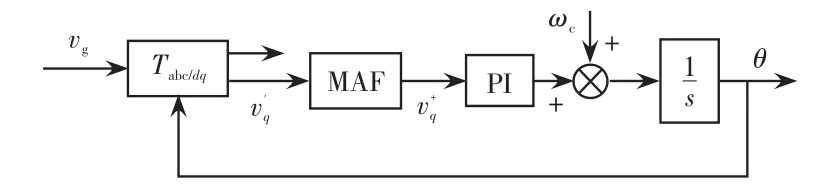
圖6 MAF負序分量消除結構Fig.6 Structure of MAF negative-sequence component elimination
圖6中,基于MAF負序分量消除具體步驟如下:
(1)通過坐標變換將abc三相靜止坐標轉換為dq兩相同步旋轉坐標;
(2)將輸出的q軸分量經過滑動平均濾波,濾除二倍頻分量;
(3)根據輸出的q軸信號進行SRF-PLL相位檢測控制,得到相角信息,并通過反饋環節為Park變換提供相位參考,通過PI控制調節,使直流分量為0,完成鎖相。
3.4 PI參數設計
建立電壓含擾動分量的小信號模型,如圖7所示。
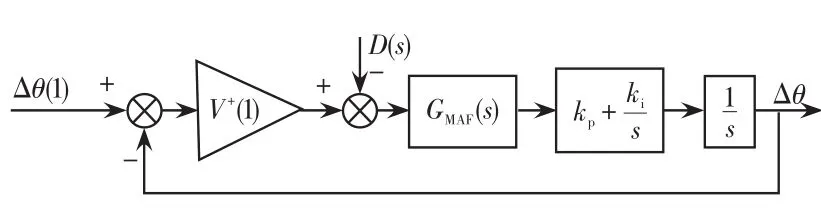
圖7 MAF-PLL小信號模型結構Fig.7 Structure of MAF-PLL small signal model

故 ξ>1,根據參考文獻[17],對鎖相環暫態過程與穩定性進行綜合考量,本文取ξ=2.4,kp=83.33,ki=2 893.5。
3.5 基于相位補償MAF動態性能設計
為提高MAF的動態性能,需對MAF引起的相位延遲進行補償。實現這一目標的簡單方法是在MAF控制回路中加入相位超前補償器[18]。
借鑒文獻[18]補償器的傳遞函數,設計MAF傳遞函數的逆函數,以有效補償MAF引起的相位延遲。傳遞函數為
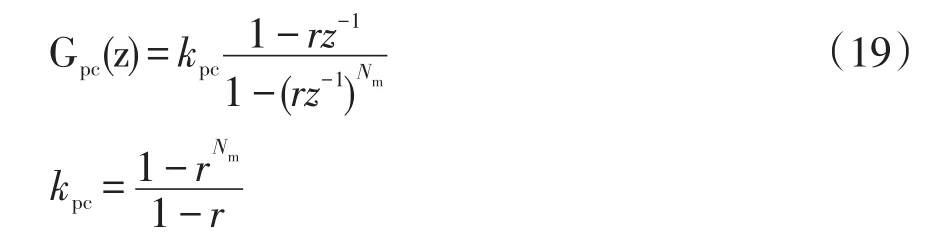
式中:kpc為傳遞函數幅值增益系數;r∈[0 1)為衰減因子。
帶有相位補償器的MAF,其衰減因子r取0.90、0.95、0.99的頻率響應如圖8所示。r為0時,系統傳遞函數不變,r為1時,相位補償控制器成為全通濾波器。結合MAF傳遞函數,權衡動態響應速度與濾除由負序分量引起的二倍頻振蕩,本文r取0.99,可有效補償由MAF引起的相位延遲。
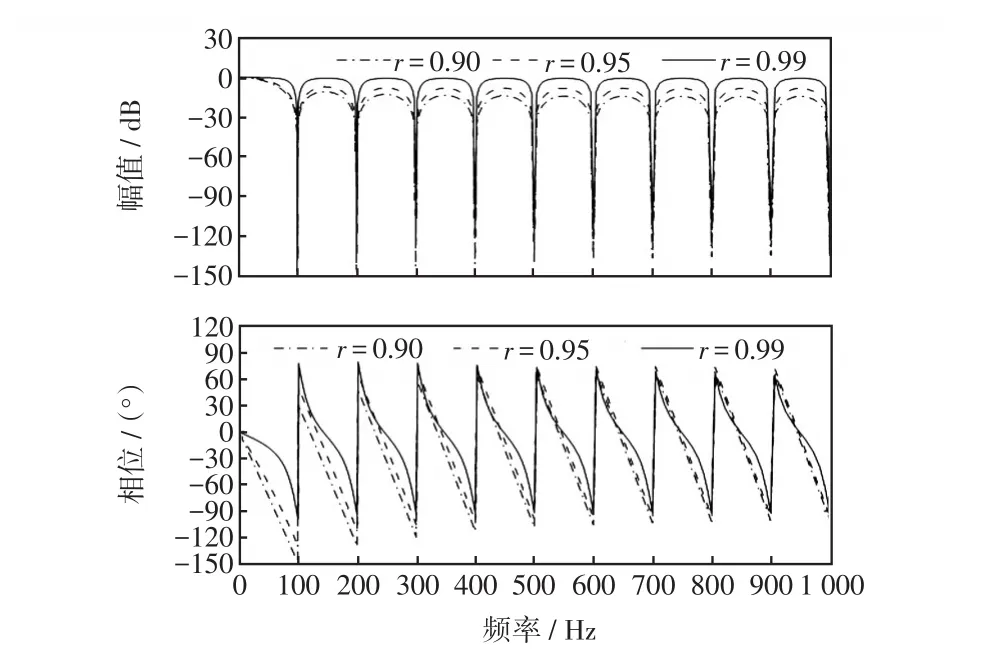
圖8 基于相位補償的MAF伯德圖Fig.8 Bode diagram of MAF based on phase compensation
由圖8可知,r=0.99系統動態特性更好。
綜上分析,設計的鎖相環結構如圖9所示。
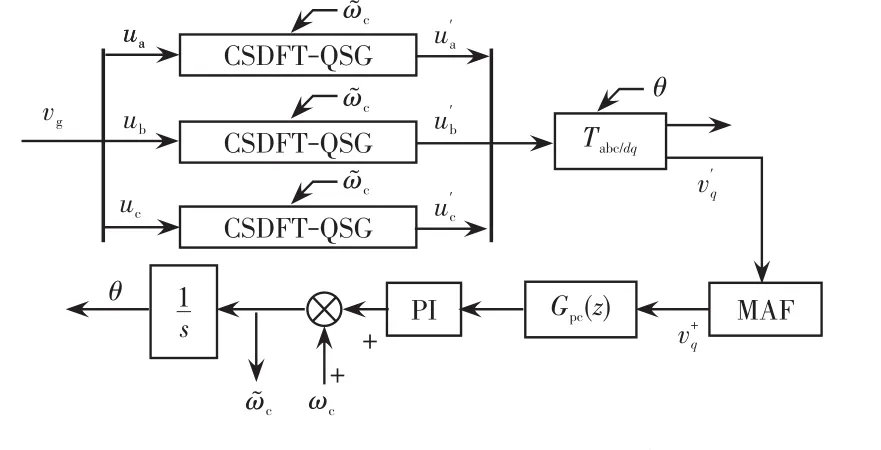
圖9 CSDFT-MAF-PLL結構Fig.9 Structure of CSDFT-MAF-PLL
4 仿真驗證與分析
為驗證所提方法正確性與可行性,在Matlab/Simulink中搭建仿真模型。將DSOGI-PLL、SDFTPLL和CSDFT-MAF-PLL進行對比分析驗證。為均衡DSOGI-PLL濾波性能和動態響應時間,阻尼系數設為0.707。CSDFT-QSG前級端N為128,采樣頻率fs為12.8 kHz。系統參數為:額定電壓有效值Vg為220 V,額定頻率為50 Hz,初始相位為0°。仿真工況設置為4種,如表1所示,具體故障類型設置為5種,如表2所示。
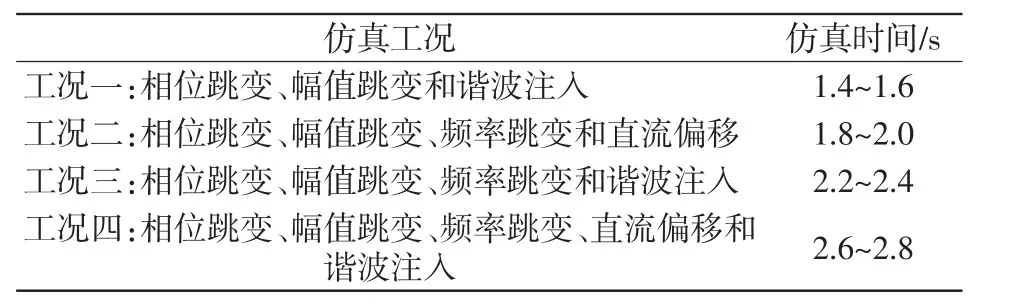
表1 仿真工況設計Tab.1 Design of simulation conditions
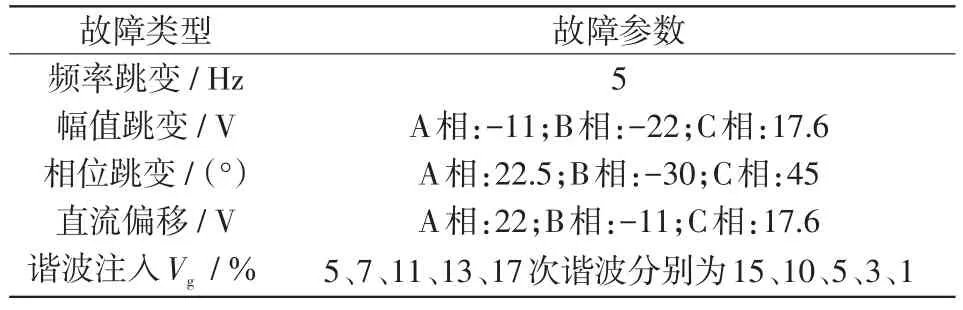
表2 故障類型設計Tab.2 Design of fault types
4.1 工況一
在1.4~1.6 s,進行工況一故障測試,仿真結果如圖10所示。
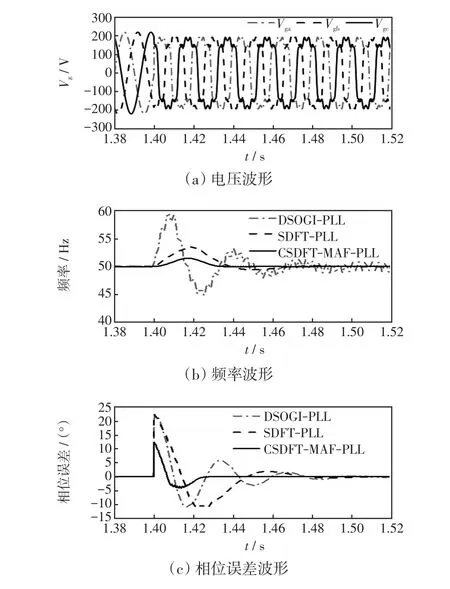
圖10 工況一仿真波形Fig.10 Simulation waveforms in Condition 1
由圖10可見:DSOGI-PLL頻率超調大,峰值為59.76 Hz,在既定時間內不能趨于穩定;SDFT-PLL超調了3.62 Hz;CSDFT-MAF-PLL超調量僅為1.5 Hz。SDFT-PLL相位誤差最大達22.5°,說明PNSC結構對SDFT有干擾。
4.2 工況二
在1.8~2.0 s,進行工況二故障測試,仿真結果如圖11所示。
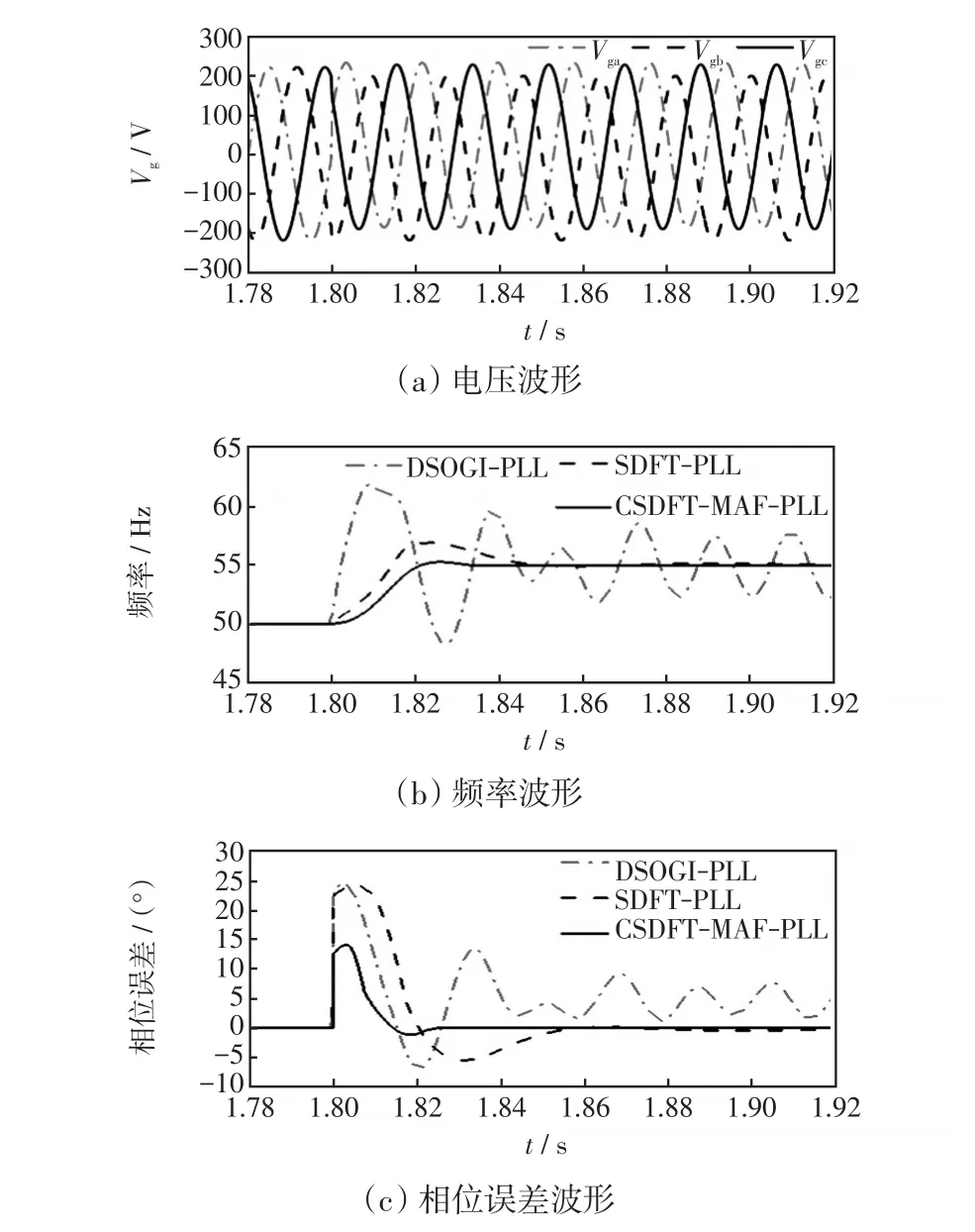
圖11 工況二仿真波形Fig.11 Simulation waveforms in Condition 2
由圖11可見:相較于工況一,DSOGI-PLL波動劇烈程度降低,但峰值增量提升,說明DSOGI結構對頻率跳變與直流偏移量敏感程度高;CSDFTMAF-PLL相位誤差最小達到-1°,比工況一提升約3.5°,故其對諧波注入較為敏感。
4.3 工況三
在2.2~2.4 s,進行工況三故障測試,仿真結果如圖12所示。
由圖12可見:DSOGI-PLL頻率動態峰值達到65 Hz,說明頻率跳變和多次諧波同時并存,對DSOGI模塊影響劇烈,而所設計的鎖相環超調量為0.27 Hz,并無明顯變化,說明所提策略魯棒性強。
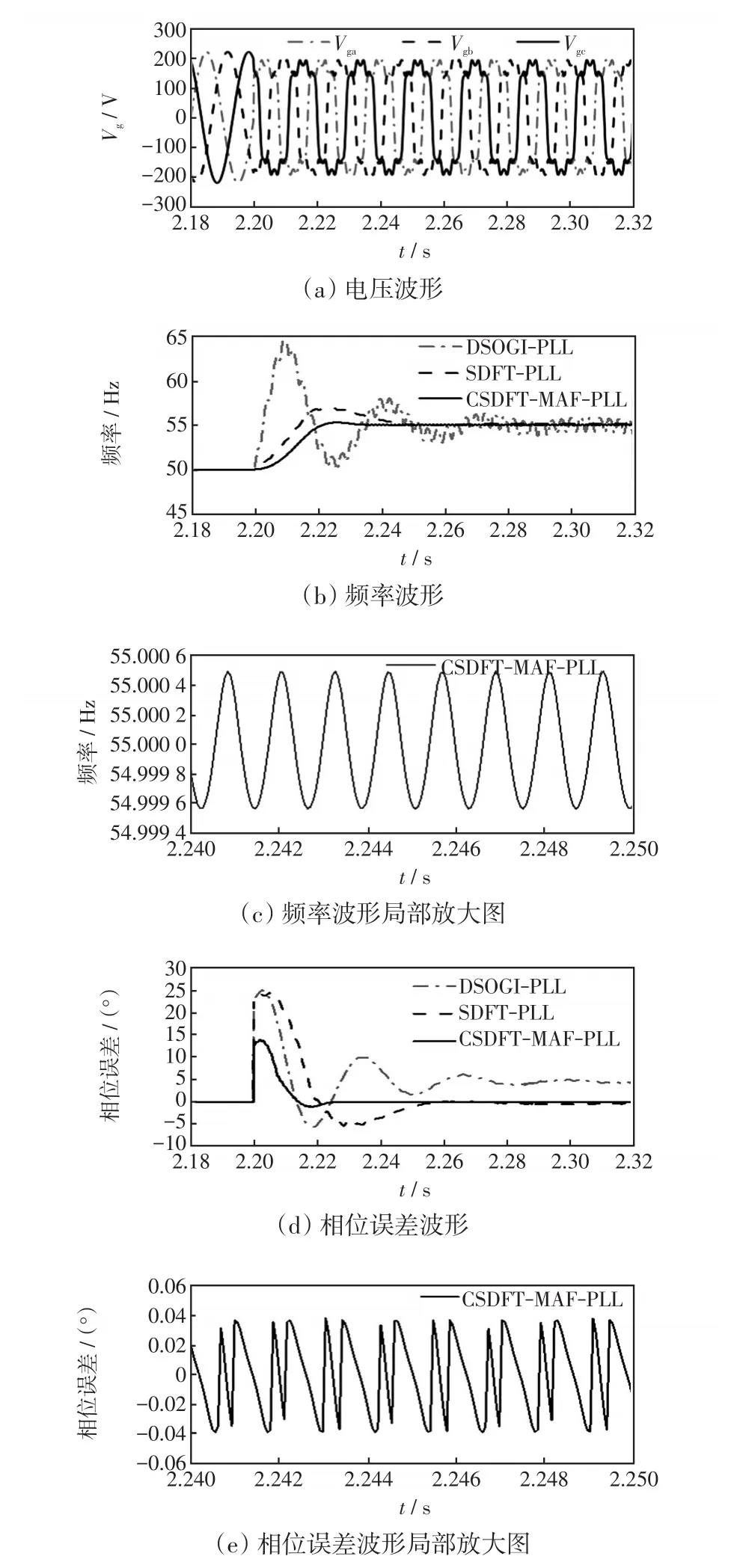
圖12 工況三仿真波形Fig.12 Simulation waveforms in Condition 3
4.4 工況四
在2.6~2.8 s,進行工況四故障測試,仿真結果如圖13所示。
由圖13可見,工況四最為復雜,相較于工況三,CSDFT-MAF-PLL穩態相位誤差約為0.059°,比工況三提高約0.02°,頻率變化不明顯。DSOGI-PLL頻率誤差大,且波動明顯。
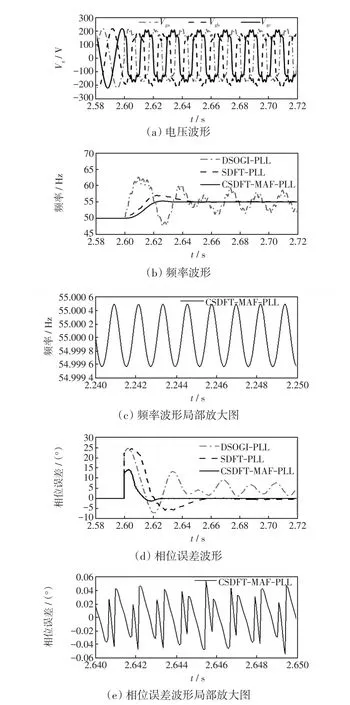
圖13 工況四仿真波形Fig.13 Simulation waveforms in Condition 4
綜上分析:數字濾波器采樣數據較大,SDFTPLL及CSDFT-MAF-PLL動態響應時間均滯后DSOGI-PLL,但在規定時限內;對比工況一、三,DSOGI-PLL相位穩態波動基本一致,但工況三下的相位誤差明顯高于工況一,可見DSOGI結構對頻率跳變很敏感,而設計的CSDFT結構降低了頻率跳變對頻譜泄漏的影響程度,相位誤差穩定在±0.04°;工況二、四與工況一、三對比,直流偏移使DSOGI-PLL頻率與相位誤差無法在額定百分比下達到穩態,而CSDFT結構波形光滑,穩態無誤差,諧波注入對其有一定影響,相位誤差增加,但在預期之內。綜合4種工況,都發生幅值與相位跳變,系統存在負序分量,而仿真結果表明所設計的MAF負序分量消除模塊效果顯著。CSDFT-MAF-PLL鎖相動態響應時間較快,并不因MAF的引入對系統造成很大延遲,說明所提相位補償控制器的有效性。相較于文獻[12],穩態精度及動態響應速度均有明顯改善。
5 結論
針對SDFT-PLL在復雜電網條件下鎖相優勢與不足展開研究,結合MAF優良濾波性能,設計CSDFT-MAF-PLL。理論分析與仿真驗證得出以下結論:
(1)提出CSDFT-QSG結構,顯著提升系統諧波抑制與直流偏移消除能力,并對頻率、幅值、相位跳變不敏感,以電網實時頻率作為后級SDFT滑窗寬度選取依據,從而減小SDFT因頻譜泄漏導致的頻率穩態誤差;
(2)提出MAF負序分量消除設計,將三相電網電壓的正序分量送入SRF-PLL,負序分量轉化為二倍頻分量被抑制;
(3)提出相位補償控制器,克服MAF相位延遲的弊端,使所設計的鎖相環在各種工況下,達到穩態的時間均保持在1.5個基波周期左右。
本文建立單機無窮大電網系統,進行了4種工況下鎖相并網性能研究,模型結構相對單一。下一步研究可以結合雙饋風電系統,開展鎖相環動態特性對系統慣性響應及穩定性分析。