弱電網下電壓源型逆變器鎖相環的改進
2022-03-16 07:39:34王靜茹張福民李占凱劉國鑫牛運騰
電測與儀表 2022年3期
關鍵詞:系統
王靜茹,張福民,李占凱,劉國鑫,牛運騰
(1.河北工業大學 省部共建電工裝備可靠性與智能化國家重點實驗室,天津 300130;2. 河北省電磁場與電器可靠性重點實驗室,天津 300130)
0 引 言
目前,可再生能源分布式發電已經成為建設環境友好和可持續發展社會的關鍵要素之一。由于新能源多位于偏遠地區、海島等區域,大量非線性負載和長距離傳輸線路的使用導致分布式發電系統與主電網的連接程度變弱[1]。通常使用短路比(Short Circuit Ratio,SCR)對分布式發電與主電網連接強度進行描述,一般將SCR值小于6的電網稱為弱電網[2]。
弱電網并網系統具有高阻抗的特點,大量電力電子器件的接入會產生多種諧波干擾;并網運行過程中產生的頻率偏差、電壓閃變等問題導致諧波失真[3],電能質量和系統穩定性無法保障。并網逆變器作為新能源與公共電網并網能量傳遞的的中間環節,研究其系統穩定性影響因素以及控制方法的改進具有重要的實際工程意義[4]。與傳統的逆變器相比,VSC具有更靈活且穩定的控制性能,被廣泛應用于新能源并網系統中[5]。然而,研究表明,采用標準矢量控制策略的VSC在連接至弱交流電網時會產生穩定性和控制性能問題[6]。
PLL作為VSC的核心環節,是影響并網VSC穩定性最主要的因素[7]。弱電網并網環境對PLL性能提出更高的要求。目前,已有大量研究針對弱電網的影響對PLL的性能進行改進[8-11]。為了提高PLL的抗電壓波動的能力,文獻[8]提出了一種基于雙二階廣義積分器的鎖相環(Double Second-Order Generalized Integrator PLL,DSOGI-PLL)它在電壓擾動時具有良好的動態特性,但不能有效抑制諧波的影響,且結構設計復雜;在傳統基于同步旋轉坐標系下的鎖相環(Synchronous Reference Frame PLL,SRF-PLL)的控制回路中加入MAF,可以大幅提高鎖相環的濾波能力[9],但由于MAF具有延遲特性,產生相位延遲導致動態響應時間變長。在文獻[10]中,擴展的PLL(Ex-tended SRF-PLL,ESRF-PLL),在電壓不平衡條件下實現零相位誤差,但在弱電網頻率變化時發生故障。另外,文獻[11]根據對稱分量法提出來一種基于增強型鎖相環的三相增強型鎖相環(Three-Phase-Enhanced PLL,3EPLL)采用四個單相鎖相環,具有較好濾波性能以及動態響應,更適用于弱電網環境,但計算量很大。上述文獻從不同角度對鎖相環的動態性能進行了改進,但受PLL性能折中的限制,在弱電網下電壓頻率波動較大時,濾波性能與鎖相精度不能兼顧。
針對弱電網下并網逆變器的控制要求,重點研究了弱電網下并網VSC中PLL的改進方法,利用MAF良好的濾波性能,抑制弱電網中多種諧波分量;采用超前補償器補償MAF的相位延遲以提高系統的動態響應;引入前饋頻率估計環,精確跟蹤輸入信號的頻率和相位,通過優化PLL動態性能,進而提高并網VSC的魯棒性。仿真驗證改進的PLL在弱電網下的有效性;建立并網VSC系統實驗平臺對所述改進方法進行驗證。
1 并網VSC系統模型
并網VSC系統由LCL濾波器、鎖相環和控制器(外環控制、內環控制)等部分組[12-14]。圖1為并網VSC系統結構圖。
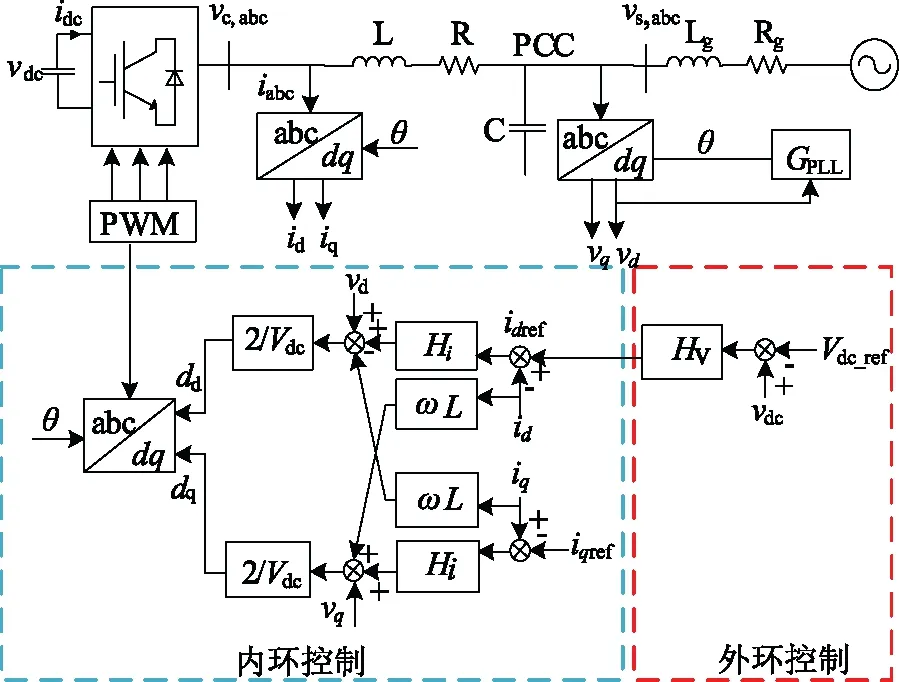
圖1 并網VSC系統結構示意圖
圖1中,vdc表示直流電壓;idc是直流電流;iabc為逆變器側電流;L為逆變器側濾波電感;R為電感L上寄生電阻;C為濾波電容;Lg為電網電感;Rg為電感Lg上電阻,其中L、C、Lg組成LCL濾波器;ω為工頻角頻率;下標c表示控制回路坐標,s表示系統回路坐標。本文采用的控制策略包括內部電流解耦控制和外直流電壓控制,所有控制器均為PI控制。
根據圖1并網VSC系統結構,可以得到dq坐標系下并網逆變器的小信號模型[9]:
(1)

(2)
(3)
根據并網VSC系統結構圖可以得到內環電流控制與外環電壓控制的方程分別為:
(4)
(5)

(6)
式中kp、ki、kvp和kvi分別為電流與電壓控制回路的比例系數和積分系數。Gci為電流環PI控制矩陣:
(7)
考慮到PLL的影響,逆變器系統通常有兩個旋轉dq坐標系,分別是系統dq坐標系和控制電路dq坐標系。一般情況下控制電路dq坐標應與系統坐標重合,但在弱電網下,電網阻抗的存在使得PCC點電壓具有擾動,PLL的動態特性會對并網逆變器系統產生影響,并且兩坐標的相位角也會產生差異。這種差異將影響控制電路dq坐標系下的電壓、電流和占空比[15]。
PLL的PI控制和傳遞函數為表達式為:
(8)
(9)

(10)
同理得到:
(11)
(12)

結合上述方程,可以得到并網VSC小信號控制模型,如圖2所示。

圖2 并網VSC系統小信號控制模型
根據圖2可推導出直流側輸出阻抗[15]:
(13)
由基于阻抗的穩定性判據可知:
(14)
當式(14)滿足廣義奈奎斯特準則,則系統穩定[16]。
通過上述分析得出,PLL的動態性能影響并網逆變器系統的各個環節,對PLL動態性能進行針對性的改進可以使VSC系統更適用于弱電網并網環境。
2 VSC系統中PLL控制方法的改進
弱電網條件下諧波干擾增多,電壓頻率波動較大,導致PLL輸出相位產生偏差,進而造成VSC輸出電流諧波失真,因此需對PLL在諧波抑制以及對頻率跟蹤方面的能力進行針對性的改進。
與其它PLL比,MAF-PLL能夠有效抑制諧波分量,可顯著提高PLL在諧波干擾下的魯棒性。但MAF的引入會造成相位延遲,導致VSC動態響應較慢。而在弱電網下,PLL面臨的并網環境更為復雜,動態響應時間相對延長,故需要消除MAF導致的相位延遲。為了使PLL更適用于弱電網環境,在保持MAF-PLL良好濾波性能的基礎上,對其控制環路進行改進。
MAF是一種線性相位濾波器[6],其在連續域和離散域的傳遞函數分別為:
(15)
式中Tω是MAF窗口長度;N是MAF窗口長度內的樣本數,由式(15)可知,MAF結構簡單,計算量低、易于數字化實現。
圖3為標準的基于平均滑動濾波器鎖相環的結構,它由傳統的同步參考坐標系的PLL和平均滑動濾波器組成。

圖3 MAF-PLL控制框圖
為了提高MAF-PLL的動態性能,本文將相位超前補償器引入到PLL控制回路中。另外,針對弱電網下電壓頻率波動較大的問題,引入前饋頻率估計回路,以動態適應頻率偏差,減少因弱電網下電壓頻率波動時導致的PLL相位估計誤差。改進后的PLL控制框圖如圖4所示。

圖4 基于超前補償器與前饋頻率估計的PLL控制
三相電壓va、vb、vc表示為:
(16)
利用Clarke變換將這些信號轉換為靜止參考坐標系下信號vα和vβ:
(17)
再利用Park變換將這些信號轉換到dq坐標系。
(18)
式中Δθ=θ*-θ,表示鎖相環估計相位θ*與實際相位θ的變差;U為電壓幅值。根據上述公式可以得到下列三角函數關系式,并利用該三角函數進行頻率估計:
θ=arctan(vα-vβ)
(19)
ω=dθ/dt
(20)
LPF為一階低通濾波器,將濾波器的時間常數設為0.01 s,則鎖相環的傳遞函數為:
(21)
式中τ是低通濾波器的時間常數。從前饋環路測得的頻率ωf與Δω相加,得到精估計頻ω*。ωf通過前饋頻率估計環,隨輸入頻率動態變化,因此可以快速消除頻率誤差。應用終值定理估計頻率波動時的穩態相位誤差,計算如下:
(22)
(23)
由上述分析可知,將前饋環路添加到現有的環路中可將系統頻率變化時的穩態誤差降低為零。針對MAF引起的相位滯后問題,可以將超前相位補償器的傳遞函數設置為MAF傳遞函數的逆函數,從而有效地補償由MAF引起的相位滯后。其表達式為:
(24)
式中r∈[0 1]稱為衰減因子;N如前所述,是MAF窗口長度內的采樣個數。
k=(1-rN)/(1-r)
(25)
式中k是一個簡單的增益,它使補償器的直流增益正常化。圖5顯示了在r的三個不同取值下,MAF的頻率響應以及MAF和相位超前補償器共同作用時的頻率響應。可以看出,r取值越接近1,超前補償器的補償效果越好。文中選取r=0.99。

圖5 不同r取值時GMAF與GMAFGc的頻率響應
由于補償器的傳遞函數幾乎接近MAF傳遞函數的逆函數,因此,GMAF與Gc乘積約為1,因此得到改進后的PLL的傳遞函數為:
(26)
上述分析表明,弱電網并網電壓頻率偏差較大時,前饋頻率估計環的加入可以提高PLL對頻率跟蹤能力,提高鎖相精度;超前補償器的使用可以有效補償由MAF引起的相位滯后問題,提高系統動態響應。
3 仿真與實驗
3.1 改進的PLL有效性驗證
為驗證所提出的鎖相環在弱電網下的有效性和優越性,在MATLAB/Simulink環境下進行了仿真。分別在系統加入頻率階躍、相角躍變、以及多種諧波擾動模擬弱電網并網環境,將該方法與較為常見和先進的DSOGI-PLL[8]、MAF-PLL[9]、ESRF-PLL[10]和3EPLL[11]進行了性能對比。
圖6給出了對比結果。在t=300 ms時,電網頻率階躍變化1 Hz;t=350 ms時,在保持1 Hz頻率階躍下,電網電壓發生30o的相角躍變;在t=400 ms時,除上述擾動外,加入第5、7、11次諧波擾動且電壓幅值相對原輸入電壓增加20%,模擬弱電網下的復雜擾動。

圖6 電網擾動下PLLs的仿真對比
表1~表3總結了在上述電網擾動情況下,DSOGI-PLL、MAF-PLL、ESRF-PLL和3EPLL以及改進的PLL的動態性能。數據分別顯示了暫態峰值相位誤差(Δφmax)和穩態峰值相位誤差(ΔφSTmax),暫態最大頻率偏差(ΔFmax)和穩態最大頻率偏差(ΔFSTmax)以及響應時間Δt。

表1 頻率階躍時PLL性能對比

表2 電壓不平衡時PLL性能對比
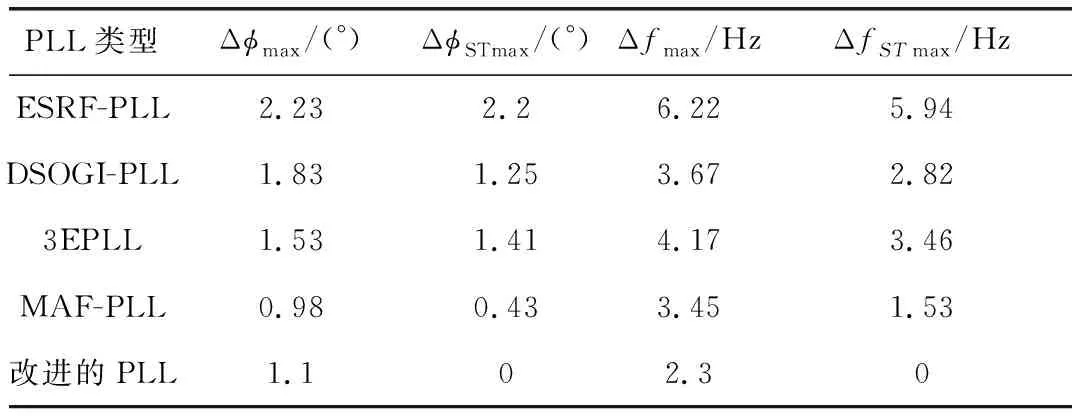
表3 復雜電網擾動下PLL性能對比
由圖6和表1~表3的對比結果可以看出,在不平衡電壓條件下,ESRF-PLL峰值誤差較小,響應時間最短,但是,該鎖相環沒有頻率自適應功能,因此在頻率階躍后產生穩態相位誤差。DSOGI-PLL和3EPLL在頻率階躍與電壓波動后,相位與頻率的穩態誤差均為零,但在面臨多種諧波與電壓波動疊加的擾動時,不能穩定的跟蹤頻率與相位。而MAF-PLL在此情況下仍能較準確地實現相位跟蹤,但受相位延遲的影響,其動態響應最為緩慢;同時輸出的信號中存在一定的波紋,這是由于弱電網環境下的MAF-PLL對頻率的跟蹤能力下降導致的[9]。
基于超前補償器與前饋頻率估計的PLL在保持MAF良好的濾波性能的基礎上,不僅在頻率階躍和電壓相角躍變時實現精準鎖相,在電網擾動條件較為復雜的弱電網環境下也可以快速動態響應。超前補償器的加入明顯的減少了鎖相環的響應時間,前饋頻率估計方法的使用,提高鎖相環對頻率和相位的跟蹤能力,使得在電網條件比較惡劣的情況下,輸出的信號波形較為平滑,系統穩定性大大提高,更適用于弱電網環境。
3.2 弱電網并網VSC系穩定性驗證
根據圖2的VSC系統框架圖,建立并網逆變器系統的阻抗模型。在SCR為3.2的條件下,得到并網VSC系統奈奎斯特曲線。表4為具體參數。

表4 PLL、電網阻抗和 LCL 濾波器參數取值
圖7(a)、圖7(b)表示在SCR為3.2的弱電網條件下,分別采用SRF-PLL和基于超前補償器與前饋頻率估計的PLL時,并網VSC系統的奈奎斯特曲線。根據奈奎斯特穩定性判據[16]分析得出,圖7(a)曲線包圍(-1,j0)點,該系統處于不穩定狀態。圖7(b)曲線不再包圍(-1,j0)點,此時的VSC系統處于穩定狀態。對比加入優化方案前后的奈奎斯特曲線可知,加入改進后的MAF-PLL可以使并網VSC系統在弱電網條件下具有穩定性。
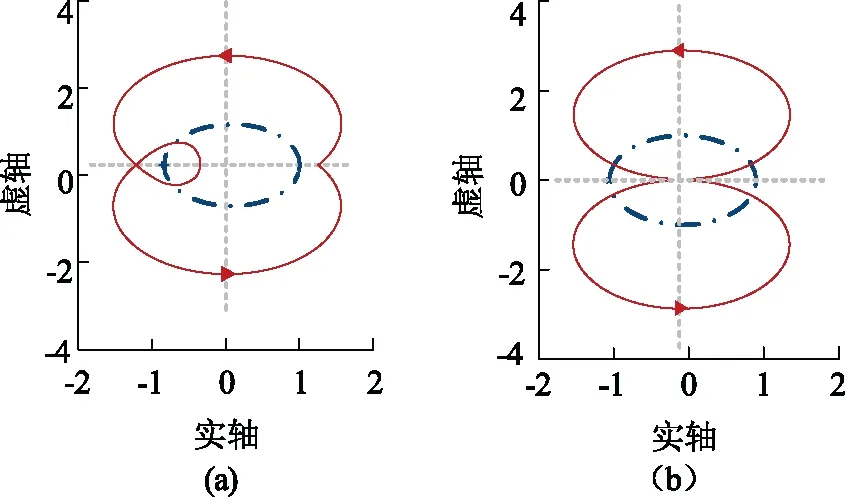
圖7 SCR為3.2條件下VSC系統奈奎斯特曲線
為驗證仿真結果,進行相應的實驗測試,根據圖2控制框圖,搭建基于DSP的并網VSC原理樣機,實驗采用某公司的TMS320F28335作為主控芯片進行數字信號處理;由可編程直流電源模擬新能源分布式發電直流側,可編程交流電源與RLC模擬主電網側與弱電網電網阻抗特性;利用基于LabVIEW設計的虛擬信號發生器模擬諧波、頻率階躍,電壓相位幅值波動等擾動信號;利用電流霍爾LT58-S7測量并網電流igabc。具體參數見表5。
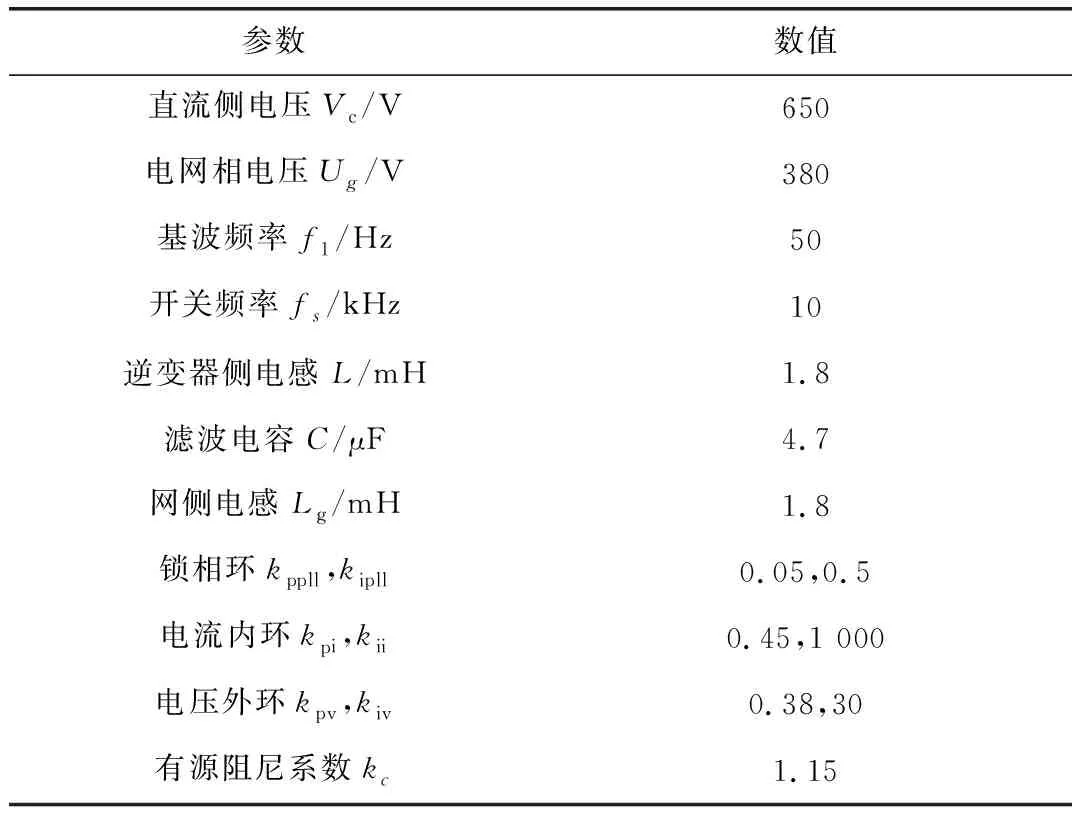
表5 PLL、電網阻抗和LCL濾波器參數取值
在t=0 s時令電網電壓頻率階躍1 Hz,相角增加10°。由于MAF-PLL的帶寬較小,且存在相位延遲的情況,調節時間較長,因此在擾動加入30 ms后進行測量。
由圖8可知,采用MAF-PLL的并網VSC系統需經過76 ms恢復到穩定狀態,穩定后并網電流igabc的畸變率為3.3%。由圖9可知,采用改進后的PLL的并網VSC系統,在擾動加入30 ms后,系統恢復時間Δt縮短為47 ms,且穩定后的并網電流igabc的畸變率減少為2.7%。分析結果可以得出,MAF-PLL加入超前補償器后使得并網VSC系統動態性能變好,且輸出誤差更小,實驗結果與3.1節仿真結果一致。

圖8 采用MAF-PLL時并網電流igabc波形
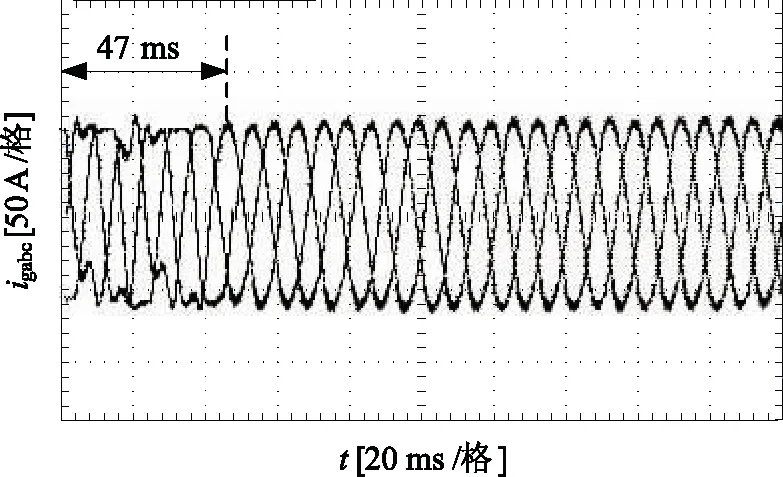
圖9 采用改進的PLL時并網電流igabc波形
為了驗證在弱電網下改進后的PLL對并網VSC穩定性的影響。在t=0時向電網注入第5次、7次、11次諧波,同時將電網電壓頻率由50 Hz變為51 Hz且電壓幅值提高10%來模擬弱電網并網時產生的復雜擾動。
擾動加入2 s后進行測量。由圖10可知,由于頻率跟蹤誤差以及對特定諧波抑制能力較差,采用MAF-PLL的并網VSC輸出電流產生畸變,系統無法恢復穩定;圖11表明,采用基于超前補償器與前饋頻率估計的PLL的并網逆變器系統,消除了頻率跟蹤誤差,有效抑制諧波分量,在系統穩定后輸出并網電流igabc波形十分接近理想波形。分析結果可知,采用改進的PLL的VSC系統在復雜的電網擾動下,仍能保證并網VSC系統穩定。實驗結果驗證了仿真結果的正確性。

圖10 復雜擾動下采用MAF-PLL并網電流igabc
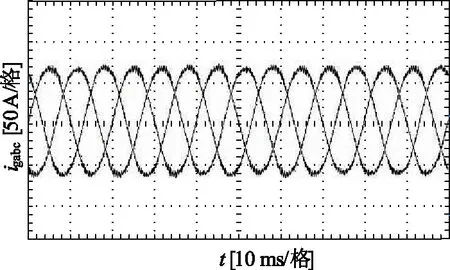
圖11 復雜擾動下采用改進的PLL時并網電流igabc
以上實驗結果表明,弱電網并網產生的諧波與電壓頻率及幅值波動會導致并網VSC系統失穩。通過加入基于超前補償器與前饋頻率估計的PLL可以有效濾除復雜諧波干擾,消除并網VSC系統輸出頻率和相位誤差,增強動態響應,顯著提高并網VSC系統在復雜擾動下的魯棒性,使VSC系統更適用于弱電網并網環境。實驗結果驗證了理論分析的正確性。
4 結束語
針對弱電網下,存在電網電壓頻率波動、多種諧波干擾時PLL對頻率和相位跟蹤性能較差導致并網逆變器失穩的問題,文中提出了一種將超前相位補償器與前饋頻率估計環引入標準的MAF-PLL的改進方法。分析了MAF-PLL的性能,利用超前相位補償器補償由MAF導致的相位延遲;在此基礎上引入前饋頻率估計回路,有效提高弱電網下,PLL的鎖相精度精度。通過對比仿真,得到改進后的PLL在頻率階躍、電壓波動、諧波干擾環境下的優越性。根據并網VSC系統模型圖,建立并網VSC阻抗模型。在SCR為3.2的條件下,得到的并網VSC系統奈奎斯特曲線表明改進后的MAF-PLL可以使并網VSC系統在弱電網條件下具有穩定性。搭建VSC系統實驗平臺對本文所述改進方法進行了驗證。實驗結果表明,經PLL改進后的VSC系統在弱電網條件下具有更快的動態響應,以及在復雜擾動下有更好魯棒性,逆變器入網電能質量得到了保證。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
