電動自行車騎行人交通違法行為演化博弈分析
2022-03-16 08:34:18湯天培
計算機仿真 2022年2期
關鍵詞:策略
湯天培,王 華,陳 豐,曹 陽
(1.南通大學交通與土木工程學院,江蘇 南通 226019;2.新加坡國立大學工程學院,新加坡 117576;3.同濟大學交通運輸工程學院,上海 200092)
1 引言
電動自行車已經成為我國居民日常出行的主要交通方式之一,但由電動自行車騎行人引發的交通事故在不斷增加。相關研究表明[1-4],電動自行車騎行人的交通違法行為(包括闖紅燈、超速騎行、占用機動車道騎行、逆向騎行等)是導致電動自行車相關交通事故的主要原因之一。現有研究主要從個體特征(性別、年齡等)[5,6]、認知心理(態度、主觀規范、知覺行為控制、道德規范、從眾傾向等)[6]、交通運行條件(機動車交通量、違法騎行人數量)[5]、交通設施條件(交叉口類型、交叉口大小、遮雨棚等)[7,8]等方面研究其對騎行人交通違法行為的影響,而忽略了交通執法者執法策略對交通違法行為的影響。目前僅有交通執法策略對機動車駕駛人交通違法行為影響的相關研究。比如,劉翰寧等[9]建立了階位罰款額度優化模型,提出了遞增式階梯罰款機制。Wong等[10]基于多項Logit模型,采用震懾效果指標量化處罰水平產生的影響,研究發現提高處罰額度和違法扣分能有效降低駕駛人違法行為。Sze等[11]評估了處罰和違法監控綜合策略的效果,研究表明該綜合策略能有效降低駕駛人的違法比例。由此可見,鮮有文獻深入探究交通執法策略對電動自行車騎行人交通違法行為的影響機理。
對電動自行車騎行人而言,會根據感知收益差、處罰額度、社會負面影響,以及自身對于交通執法者以往的執法概率的認知,進行交通違法行為的決策。對交通執法者而言,受限于警力限制,警力無法覆蓋區域內每個路段,交通執法者會根據處罰額度、執法成本、社會負面影響,以及騎行人群體以往的違法概率,綜合決策在區域路網內警力或交通監控攝像頭對路段和交叉口的覆蓋密度,即執法概率。因此,兩者之間存在博弈關系,即騎行人“違法”或“不違法”的策略選擇與交通執法者“執法”或“不執法”的策略選擇是一個互動的動態演化過程。而演化博弈論就是將博弈分析與動態演化相結合的分析方法[12-14],可應用于探究電動自行車騎行人與交通執法者策略選擇的演化博弈過程與規律,并通過仿真分析處罰額度、感知收益差、執法成本和社會負面影響,對博弈雙方策略選擇概率的影響,揭示不同交通執法策略對電動自行車騎行人交通違法行為的影響機理。
2 電動自行車騎行人與交通執法者的演化博弈模型分析
2.1 博弈模型假設
基于對電動自行車騎行人與交通執法者策略選擇的合理考慮,提出以下假設。
假設1:騎行人的策略集為{違法、不違法},交通執法者的策略集為{執法、不執法}。其中,“不執法”是指在區域路網內沒有警力巡邏或交通監控攝像頭。
假設2:騎行人和交通執法者都是在不確定情況下選擇策略,博弈雙方均為有限理性的,無法通過一次博弈而獲取自身的最大收益策略,必須通過不斷的重復博弈才能獲取最大收益策略。
假設3:研究主要考慮騎行人群體違法行為決策,不考慮騎行人個體特征的差異影響,仿真參數采用群體平均值,因此對群體的行為決策而言,分析結果仍然是合理的。
假設4:騎行人在選擇違法策略時,認為違法后發生交通事故的概率為零,即在決策是否違法時未考慮可能發生交通事故后的成本。相關研究表明,雖然大部分的駕駛人能意識到交通違法行為會產生事故風險,但是他們仍然樂觀的相信這些交通事故不會發生[15]。
2.2 博弈矩陣構建
當騎行人選擇“違法”,交通執法者選擇“執法”,即“違法-執法”策略時,騎行人的收益為V1-Cp,其中V1為騎行人認為單次違法行為后產生的平均感知收益(單位:元),Cp為交通執法者對單次違法行為的平均處罰額度(單位:元);交通執法者的收益為Cp-Ce,其中Ce為交通執法者單次執法的平均執法成本(單位:元)。當騎行人選擇“違法”,交通執法者選擇“不執法”,即“違法-不執法”策略時,騎行人的收益為V1,交通執法者的收益為-I,其中I為單次違法行為未被處罰產生的平均社會負面影響,用經濟成本反應該影響(單位:元)。騎行人選擇“不違法”,交通執法者選擇“執法”,即“不違法-執法”策略時,騎行人的收益為V2,交通執法者的收益為-Ce,其中V2為騎行人認為單次不違法產生的平均感知收益(單位:元)。騎行人選擇“不違法”,交通執法者選擇“不執法”,即“不違法-不執法”策略時,騎行人的收益為V2,交通執法者的收益為0。由此可得,電動自行車騎行人與交通執法者的博弈矩陣,見表1。
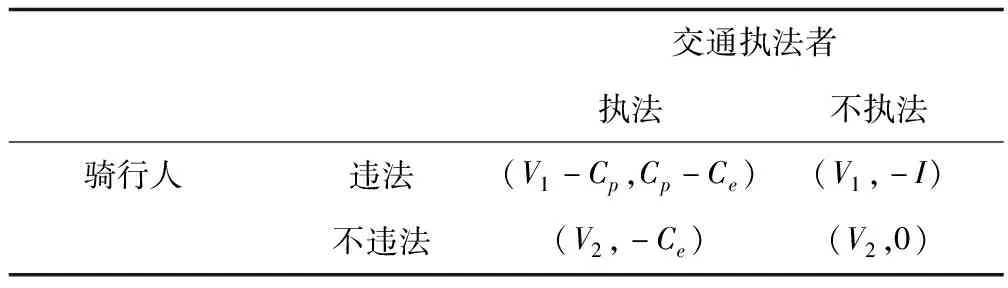
表1 博弈矩陣
2.3 演化博弈模型構建
假設電動自行車騎行人選擇“違法”策略的概率為p,則選擇“不違法”策略的概率為1-p;假設交通執法者選擇“執法”策略的概率為q,則選擇“不執法”策略的概率為1-q。其中,交通執法者選擇“執法”策略的概率q,即為在某區域路網內警力或交通監控攝像頭對路段和交叉口的覆蓋密度。騎行人與交通執法者可根據歷史信息判斷對方的策略選擇行為,表現為策略選擇概率p和q的動態變化與調整,即博弈雙方的策略選擇概率在動態復制中演化。由此,基于演化博弈理論中的復制動態分析法[16],進行演化博弈模型的構建。
(1)
(2)
(3)
(4)
(5)
(6)
將電動自行車騎行人策略選擇概率的復制動態方程記為dp/dt,交通執法者策略選擇概率的復制動態方程記為dq/dt,計算表達式如下
(7)
(8)
2.4 靜態處罰策略模型的求解及穩定性分析
采用Jacobian矩陣的局部穩定分析法進行檢驗[16],即根據Jacobian矩陣對應行列式及跡滿足的條件“Det(J)>0且Tr(J)<0”篩選出演化穩定策略(ESS)。根據式(7)和(8)可得Jacobian矩陣(9),以及該矩陣的Det(J)和Tr(J),分別為式(10)和(11)
(9)
Det(J)=(1-2p)(V1-V2-qCp)(1-2q)
(pCp+pI-Ce)-(q-q2)(Cp+I)(p2-p)Cp
(10)
Tr(J)=(1-2p)(V1-V2-qCp)+(1-2q)
(pCp+pI-Ce)
(11)
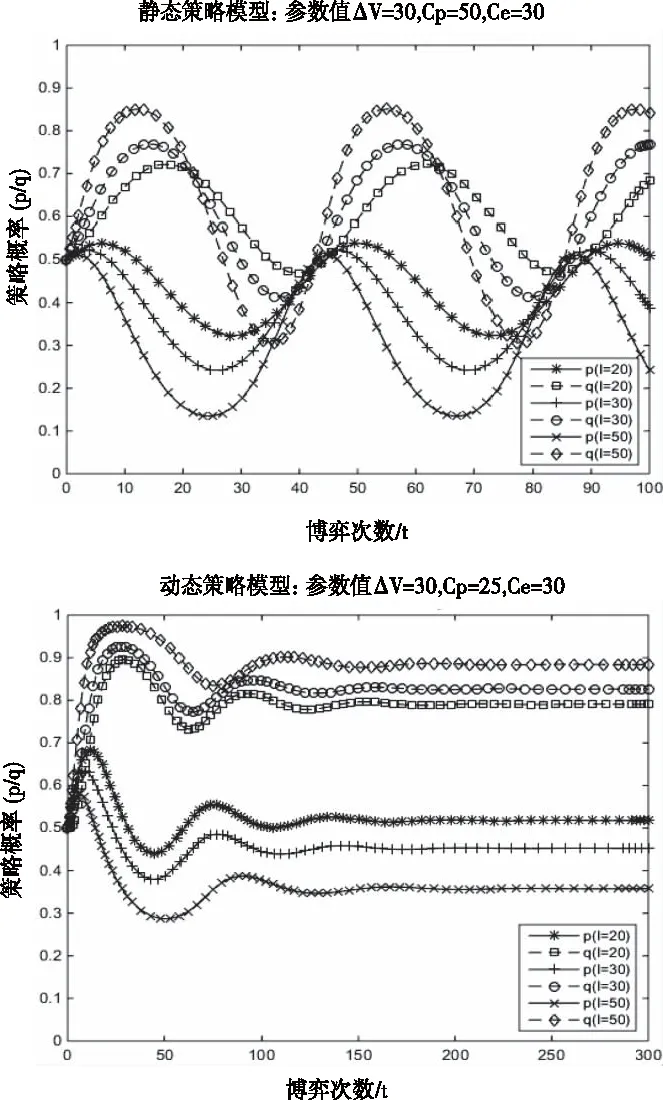
由式(10)和(11)可知,騎行人對交通違法與不違法的感知收益差是研究的重點,因此令V1-V2=ΔV,ΔV即為感知收益差。根據演化穩定策略的條件,分別對演化博弈系統的穩定性進行分析①條件一:當ΔV>Cp,且Cp+I>Ce時,E4=(1,1)為均衡點;②條件二:當ΔV>0,且Cp+I 靜態處罰策略模型的穩定性條件三中,即當0<ΔV (12) (13) (14) 根據式(13)和(14)可得Jacobian矩陣(15),以及該矩陣的Det(J)和Tr(J),分別為式(16)和(17) (15) Det(J)=(qCp(3p2-1)+(V1-V2)(1-2p))(1-2q)(p2Cp+p(Cp+I)-Ce)-(2pqCp(1-q) -(q2-q)(Cp+I))(p3-p)Cp (16) Tr(J)=qCp(3p2-1)+(V1-V2)(1-2p)+(1-2q)(p2Cp+p(Cp+I)-Ce) (17) 根據演化穩定策略的條件,分別對演化博弈系統的穩定性進行分析:①條件一:當ΔV>2Cp,且2Cp+I>Ce時,E4=(1,1)為均衡點;②條件二:當ΔV>0,且2Cp+I 采用MATLAB進行仿真分析,通過輸入參數的調整,觀察靜態處罰策略模型和動態處罰策略模型演化博弈規律的變化。探究處罰額度、感知收益差、執法成本和社會負面影響,對電動自行車騎行人和對交通執法者策略選擇演化規律的影響。由于博弈雙方的策略選擇初始概率對均衡解沒有影響,本次仿真設定概率初始值為(p0,q0)=(0.5,0.5)。 在純策略條件下,即條件一和條件二情況下,仿真結果如圖1至圖4。在靜態或動態策略模型中,博弈雙方的策略選擇概率均收斂于均衡解(1,1)或(1,0)。隨著處罰額度的增加/感知收益差的減小/執法成本的減小/社會負面影響的增加,電動自行車騎行人選擇違法的概率收斂于1的速度會變慢;隨著處罰額度的增加/感知收益差的增加/執法成本的減小/社會負面影響的增加,交通執法者選擇執法的概率收斂于1的速度會變快(條件一),收斂于0的速度會變慢(條件二)。由此可見,當最大處罰額度小于感知收益差,且執法成本較小(小于最大處罰額度和社會負面影響成本之和)時,電動自行車騎行人傾向于選擇違法行為,交通執法者傾向于選擇執法。當執法成本較高(大于最大處罰額度和社會負面影響成本之和)時,電動自行車騎行人始終傾向于選擇違法行為,而交通執法者傾向于選擇不執法。因此,在上述情況下無論如何調整處罰額度、感知收益差、執法成本和社會負面影響,均無法有效減少電動自行車騎行人的交通違法行為。 圖1 處罰額度對博弈雙方策略選擇概率的影響(條件一、二) 圖2 感知收益差對博弈雙方策略選擇概率的影響(條件一、二) 圖3 執法成本對博弈雙方策略選擇概率的影響(條件一、二) 圖4 社會負面影響對博弈雙方策略選擇概率的影響(條件一、二) 在混合策略條件下,即條件三情況下,仿真結果如圖5至圖8,采用動態處罰策略可有效抑制博弈雙方的策略選擇波動,并達到均衡解。 4.2.1 處罰額度影響 如圖5,靜態策略模型中,博弈雙方的策略選擇概率圍繞(0.38,0.83)、(0.30,0.63)、(0.25,0.50)進行周期性波動,即隨著處罰額度的增加,騎行人與交通執法者策略選擇的波動中心點逐漸下降,但無法達到均衡解。動態策略模型中,博弈雙方的策略選擇概率經過多次博弈波動后收斂于均衡解(0.67,1)、(0.40,0.90)、(0.34,0.74),即隨著處罰額度的增加,騎行人選擇違法的概率顯著降低,交通執法者選擇執法的概率也顯著降低。 圖5 處罰額度對博弈雙方策略選擇概率的影響(條件三) 由此,建議交通執法者通過調研,充分了解騎行人對違法和不違法的感知收益,基于感知收益差合理制定處罰額度。采用動態處罰策略,制定的最大處罰額度大于感知收益差,在此基礎上提高處罰額度,可保證交通執法者采取較低的執法概率,也能有效約束騎行人的交通違法行為。 4.2.2 感知收益差影響 如圖6,靜態策略模型中,博弈雙方的策略選擇概率圍繞(0.43,0.20)、(0.43,0.40)、(0.43,0.60)進行周期性波動,即隨著感知收益差的減小,騎行人選擇違法的概率波動中心點保持不變,交通執法者選擇執法的概率波動中心點顯著降低,但均無法達到均衡解。動態策略模型中,博弈雙方的策略選擇概率經過多次博弈波動后收斂于均衡解(0.52,0.27)、(0.52,0.53)、(0.52,0.79),即隨著感知收益差的減小,騎行人選擇違法的概率保持不變,交通執法者選擇執法的概率顯著減小。 圖6 感知收益差對博弈雙方策略選擇概率的影響(條件三) 由此,建議交通執法者采用動態處罰策略,通過交通安全基礎教育、宣傳與培訓等,將感知收益差控制為小于最大處罰額度。在此基礎上減少感知收益差,以較低的警力或交通監控攝像頭覆蓋密度,也能將騎行人交通違法概率控制在同一水平。 由此,建議交通執法者采用動態處罰策略,通過交通安全基礎教育、宣傳與培訓等,將感知收益差控制為小于最大處罰額度。在此基礎上減少感知收益差,以較低的警力或交通監控攝像頭覆蓋密度,也能將騎行人交通違法概率控制在同一水平。 4.2.3 執法成本影響 如圖7,靜態策略模型中,博弈雙方的策略選擇概率圍繞(0.43,0.60)、(0.71,0.60)、(0.86,0.60)進行周期性波動,即隨著執法成本的減小,騎行人選擇違法的概率波動中心點顯著降低,交通執法者選擇執法的概率波動中心點保持不變。動態策略模型中,博弈雙方的策略選擇概率經過多次博弈波動后收斂于均衡解(0.52,0.79)、(0.78,0.67)、(0.89,0.62),即隨著執法成本的減小,騎行人選擇違法的概率會顯著降低,交通執法者選擇執法的概率會逐漸提高。 圖7 執法成本對博弈雙方策略選擇概率的影響(條件三) 由此,建議采取動態處罰策略,隨著執法成本的減小,交通執法者適當提高執法概率,可將騎行人違法概率控制在更低的水平。比如,采用基于RFID技術的闖紅燈自動識別系統,對電動自行車騎行人闖紅燈行為進行自動抓拍。雖然前期硬件投入會導致執法成本的增加,但是硬件成本會隨著技術發展而降低,同時也能減少人力成本,從而有效控制電動自行車騎行人的交通違法行為。 4.2.4 社會負面影響 如圖8,靜態策略模型中,博弈雙方的策略選擇概率圍繞(0.43,0.60)、(0.38,0.60)、(0.30,0.60)進行周期性波動,即隨著社會負面影響的增加,騎行人選擇違法的概率波動中心點逐漸降低,交通執法者選擇執法的概率波動中心點保持不變,但均無法達到均衡解。動態策略模型中,博弈雙方的策略選擇概率經過多次博弈波動后收斂于均衡解(0.52,0.79)、(0.45,0.83)、(0.36,0.88),即隨著社會負面影響的增加,騎行人選擇違法的概率會逐漸降低,交通執法者選擇執法的概率會逐漸增加。 圖8 社會負面影響對對博弈雙方策略選擇概率的影響(條件三) 由此,建議采用動態處罰策略,當社會負面影響成本不斷提高時,將促使交通執法者維持在較高的執法概率,從而有效降低電動自行車騎行人的違法概率。具體而言,可通過社會輿論手段提高交通違法行為的社會負面影響,有助于顯著降低騎行人的交通違法行為。 1)基于演化博弈論,構建了電動自行車騎行人與交通執法者策略選擇的演化博弈模型,分析了交通執法策略對騎行人交通違法行為的影響,提出了交通執法策略建議,可有效減少電動自行車騎行人的交通違法行為。 2)當交通執法者制定的最大處罰額度小于感知收益差時,采用靜態處罰策略或動態處罰策略,均無法有效減少電動自行車騎行人的交通違法行為。 3)當交通執法者制定的最大處罰額度大于感知收益差,執法成本較小(小于最大處罰額度和社會負面影響成本之和)時,采用靜態處罰策略,騎行人與交通執法者策略選擇的博弈過程沒有均衡解,這個不利于雙方的策略選擇。采用動態處罰策略,可有效抑制博弈雙方的策略選擇波動,達到均衡解。現階段,全國各地都存在交通警力不足的情況,可通過合理制定或優化處罰額度、感知收益差、執法成本、社會負面影響等因素,以較低的區域路網警力覆蓋密度,也能有效降低電動自行車騎行人的交通違法行為。 4)本次構建的演化博弈模型中仍存在一些不足。比如,未考慮騎行人可能發生交通事故而產生的成本,以及未考慮交通執法者的執法有效性等。以上不足將是后續研究工作的重點3 電動自行車騎行人與交通執法者的動態處罰演化博弈模型分析
3.1 動態處罰演化博弈模型構建

3.2 動態處罰策略模型的求解及穩定性分析
4 演化博弈仿真分析
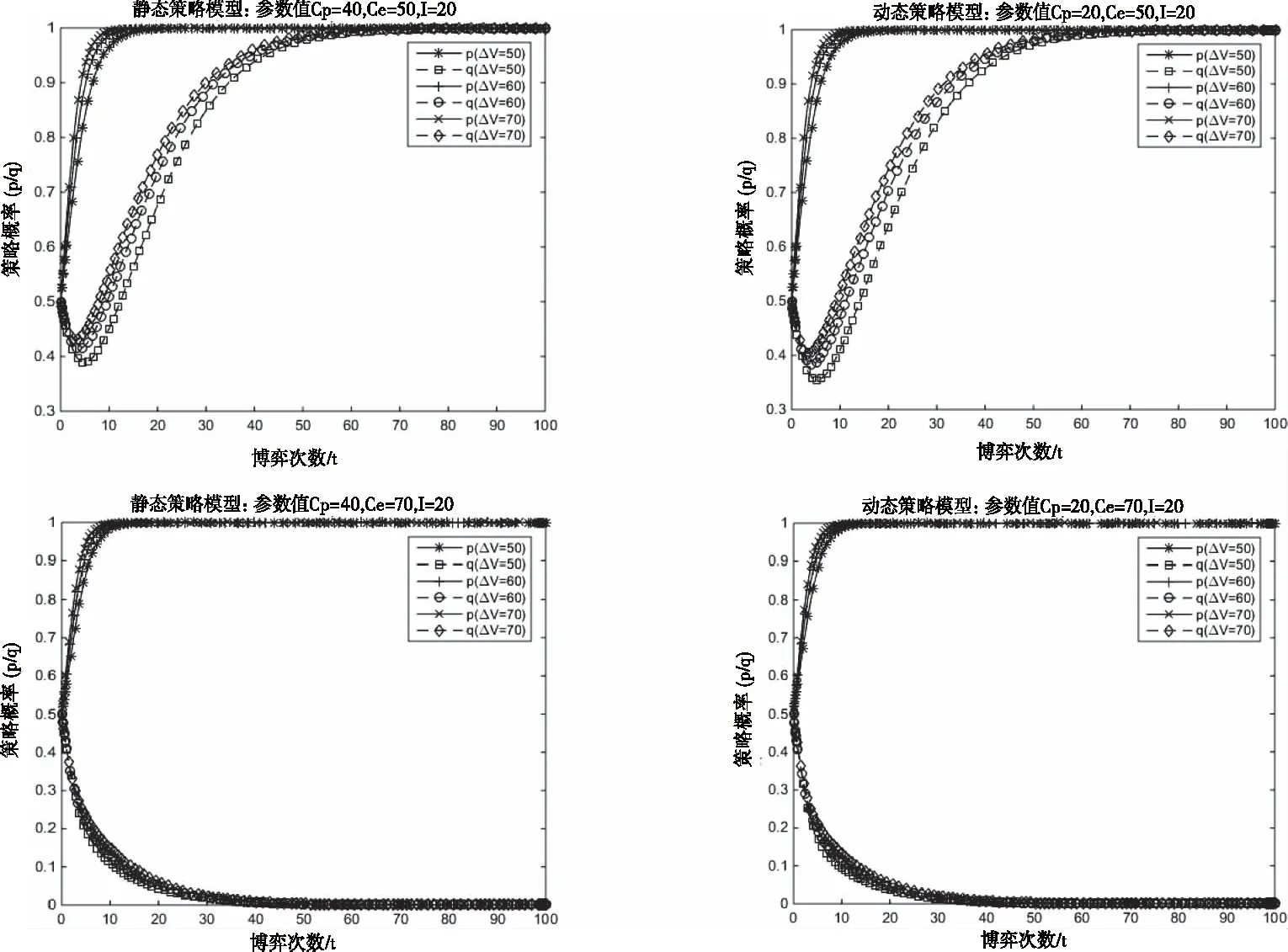
4.1 純策略條件



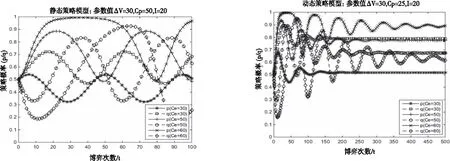
4.2 混合策略條件


5 結論
猜你喜歡
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:42中學生數理化·高一版(2020年3期)2020-04-21 08:03:20中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10小學生作文(低年級適用)(2018年9期)2018-10-08 02:29:48中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:10數學大世界(2018年1期)2018-04-12 05:39:14幸福(2017年18期)2018-01-03 06:34:53中國衛生(2016年8期)2016-11-12 13:26:50
