芯片分揀機(jī)中直線電機(jī)的軌跡優(yōu)化
2022-03-15 04:06:32王樹峰孟新宇
機(jī)械工程與自動化 2022年1期
關(guān)鍵詞:優(yōu)化
王樹峰,孟新宇
(沈陽工業(yè)大學(xué) 機(jī)械工程學(xué)院,遼寧 沈陽 110870)
0 引言
分揀機(jī)構(gòu)是芯片分揀機(jī)實現(xiàn)芯片分揀的核心機(jī)構(gòu)[1],而擺臂是分揀機(jī)構(gòu)中最核心的功能零部件,最終需要通過分揀機(jī)構(gòu)擺臂帶動吸嘴完成芯片的轉(zhuǎn)移。擺臂在直線電機(jī)驅(qū)動下快速地啟停以及移動,會使擺臂產(chǎn)生較大的慣性振動,將直接影響芯片的拾取精度,因此需對直線電機(jī)的軌跡進(jìn)行優(yōu)化,以此來提高擺臂的定位精度及拾取精度。本文在建立直線電機(jī)的動力學(xué)模型之后,根據(jù)直線電機(jī)的現(xiàn)有參數(shù),利用MATLAB軟件求出直線電機(jī)在滿載條件下的運(yùn)動仿真曲線,采用五次多項式插值法對直線電機(jī)的軌跡進(jìn)行優(yōu)化,以達(dá)到預(yù)期的目標(biāo)。
1 直線電機(jī)力學(xué)系統(tǒng)的計算與分析
直線電機(jī)可以看作是由旋轉(zhuǎn)電機(jī)演變而來,旋轉(zhuǎn)電機(jī)的定子部分轉(zhuǎn)化為直線電機(jī)的初級,動子部分轉(zhuǎn)為直線電機(jī)的次級,它是將電能直接轉(zhuǎn)換成直線運(yùn)動機(jī)械能的電力傳動裝置[2]。
1.1 直線電機(jī)的受力模型
本文采用水平的結(jié)構(gòu)布局設(shè)計來安裝直線電機(jī)[3],其受力模型如圖1所示。
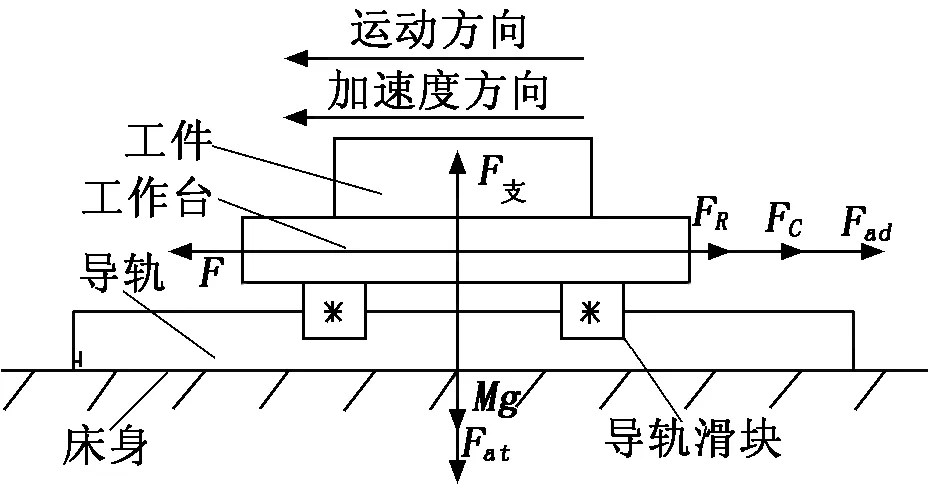
圖1 水平布局直線電機(jī)進(jìn)給系統(tǒng)受力模型
水平方向受力平衡方程為:
F=FR+Fad+FC.
(1)
其中:F為直線電機(jī)的推力,N;FR為摩擦力,N;Fad為慣性力,N;FC為切削力,N。FC可根據(jù)金屬切削原理計算,更可靠的還是通過仿真和實驗測得。摩擦力FR取決于導(dǎo)軌的摩擦因數(shù)、移動部件的總質(zhì)量及定子與動子間的垂直吸引力。摩擦力FR計算公式為:
FR=μ(Mg+Fat).
(2)
其中:μ為導(dǎo)軌的摩擦因數(shù);Fat為定子與動子間的垂直吸引力,N;M為移動部件的總質(zhì)量,kg;g為重力加速度,m/s2。
1.2 直線電機(jī)的推動力
水平布局結(jié)構(gòu)形式的直線電機(jī),其工作臺的速度曲線如圖2所示。

圖2 工作臺運(yùn)動速度-時間曲線
加速過程中的加速度和減速過程中的加速度的計算公式為:
(3)
其中:am為加速過程中的加速度,m/s2;vm為最大速度,m/s;tm為加速時間,s;dm為減速過程中的加速度,m/s2;td為減速時間,s。
移動部件的總質(zhì)量可由滑動體及負(fù)載質(zhì)量與線圈繞組質(zhì)量之和表示:
經(jīng)濟(jì)全球化的背景下,發(fā)展綠色金融是順應(yīng)國際金融市場發(fā)展趨勢、推動世界各國經(jīng)濟(jì)可持續(xù)發(fā)展的重要要求。綠色金融最突出的特點就是,它更強(qiáng)調(diào)人類社會的生存環(huán)境利益,它將對環(huán)境保護(hù)和對資源的有效利用程度作為計量其活動成效的標(biāo)準(zhǔn)之一,通過自身活動引導(dǎo)各經(jīng)濟(jì)主體注重自然生態(tài)平衡。它講求金融活動與環(huán)境保護(hù)、生態(tài)平衡的協(xié)調(diào)發(fā)展,最終實現(xiàn)經(jīng)濟(jì)社會的可持續(xù)發(fā)展。
M=M1+M2.
(4)
其中:M1為滑動體及負(fù)載質(zhì)量,kg;M2為線圈繞組質(zhì)量,kg。
勻速運(yùn)動時的推力計算公式為:
Fr=FC+μ(Mg+Fat).
(5)
其中:Fr為勻速運(yùn)動時的推力,N。
加速過程中的推力及減速過程中的推力計算公式為:
(6)
其中:Fa為加速過程中的推力,N;Fd1為減速過程中的推力,N。
電機(jī)在運(yùn)行過程中需滿足以下技術(shù)指標(biāo),計算公式為:
(7)
其中:Fmax為電機(jī)的實際最大推力,N;Fpeak為電機(jī)的理論最大推力,N;Frms為均方根有效推力,N;Fcont為額定連續(xù)推力,N。Fmax的大小為加速過程中的推力Fa、減速過程中的推力Fd1及摩擦力FR中的最大值。均方根有效推力Frms計算公式為:
(8)
其中:tr為勻速運(yùn)動時間,s;tdw為停止時間,s;t′為總時間,s。總時間t′的計算公式為:
t′=tm+tr+tdw+td.
(9)
直線電機(jī)在實際運(yùn)轉(zhuǎn)過程中,電機(jī)的推力會隨著速度的增大而減小,其中電機(jī)的理論最大推力Fpeak、額定連續(xù)推力Fcont與速度的關(guān)系可用以下計算公式表示:
(10)
其中:v為任意時刻的速度,m/s。
本文在給定滑動體及負(fù)載質(zhì)量M1、線圈繞組質(zhì)量M2、水平運(yùn)動距離L以及電機(jī)驅(qū)動器型號等參數(shù)下利用MATLAB軟件求出直線電機(jī)在滿載條件下的運(yùn)動仿真曲線。
給定的具體參數(shù)如表1所示。
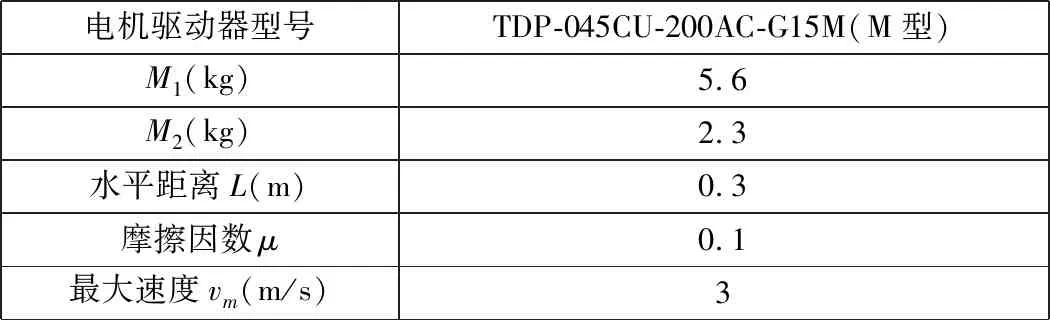
表1 給定的具體參數(shù)
利用MATLAB軟件得到的位移-時間、速度-時間以及加速度-時間曲線如圖3所示。

圖3 直線電機(jī)運(yùn)動仿真曲線
2 直線電機(jī)的軌跡優(yōu)化
通過以上分析,我們從加速度-時間曲線上可以明顯地看到在初始時刻加速度不為零,因此電機(jī)會受到一個較大的沖擊,而在速度最大處加速度會有一個明顯的反向階躍力,這會對電機(jī)驅(qū)動的擺臂造成較大的振蕩,可能會造成拾取擺臂末端的強(qiáng)烈振蕩或拾取的芯片從吸嘴中脫落,因此需要對電機(jī)的軌跡進(jìn)行優(yōu)化來減少振蕩沖擊。
軌跡優(yōu)化領(lǐng)域中常用的方法有多項式插值法以及樣條插值法等。在實際工程應(yīng)用中,為保證擺臂的高速運(yùn)動和定位精度,減少系統(tǒng)發(fā)生振動等情況,優(yōu)化生成的軌跡必須是光滑連續(xù),其位移、速度、加速度曲線需平滑連續(xù),因此,經(jīng)常采用五次多項式插值法來保證控制系統(tǒng)計算性能滿足要求。本文針對五次多項式插值計算情況進(jìn)行分析。考慮2個數(shù)據(jù)點之間插值的情況,五次多項式插值方法的數(shù)學(xué)表達(dá)式為:
q(t)=x0+x1(t-t0)+x2(t-t0)2+x3(t-t0)3+x4(t-t0)4+x5(t-t0)5t0≤t≤t1.
(11)
其中:q(t)為任意時刻t的位置;x0,x1,…,x5為待確定的參數(shù);t0為初始時刻,s;t1為終止時刻,s。
由于有6個待確定參數(shù),所以需要6個約束條件,即起始點t0和終點t1的位置、速度和加速度信息,為此給定如下條件:
(12)
其中:q0為初始位置;q1為終止位置;v0為初始速度,m/s;v1為終止速度,m/s;a0為初始加速度,m/s2;a1為終止加速度,m/s2。
待確定參數(shù)x0,…,x5可通過以下計算公式得到:
(13)
其中:h和T為中間變量,其計算公式為:
(14)
對于具有n個數(shù)據(jù)點的情況,可以對所有相鄰的兩個點應(yīng)用式(11)~式(14)得到最終的插值曲線。實驗結(jié)果如圖4所示。
從圖4中可以看出,位移、速度、加速度三條曲線都是連續(xù)平滑的。至此,通過減小振蕩,完成了目標(biāo)優(yōu)化。

圖4 五次多項式插值結(jié)果
3 結(jié)束語
從仿真結(jié)果看,五次多項式插值法適合對直線電機(jī)的軌跡進(jìn)行優(yōu)化,優(yōu)化后的速度和加速度曲線連續(xù)平滑,可以減小擺臂在運(yùn)動過程中的振動并且提高定位精度,為下一步運(yùn)動軌跡控制策略的優(yōu)化奠定了基礎(chǔ)。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
