基于事件觸發(fā)的多智能體系統(tǒng)自適應(yīng)容錯(cuò)控制
2022-03-15 13:45:16王君,張杰
電子設(shè)計(jì)工程 2022年5期
王 君,張 杰
(1.蘭州理工大學(xué)電氣工程與信息工程學(xué)院,甘肅蘭州 730050;2.甘肅省工業(yè)過(guò)程先進(jìn)控制重點(diǎn)實(shí)驗(yàn)室,甘肅 蘭州 730050)
近年來(lái),隨著人工智能技術(shù)、傳感器技術(shù)和分布式網(wǎng)絡(luò)的快速發(fā)展,多智能體系統(tǒng)以其復(fù)雜、有效、強(qiáng)大的智能行為,可以實(shí)現(xiàn)單個(gè)個(gè)體無(wú)法實(shí)現(xiàn)的功能而被廣泛應(yīng)用于航天衛(wèi)星、化工工業(yè)、智能電網(wǎng)、飛行器編隊(duì)、智能交通與物流等領(lǐng)域[1-3]。但是多智能體系統(tǒng)仍面臨著許多安全問(wèn)題,尤其是系統(tǒng)空間中分布著大量的元器件,比起單個(gè)智能體系統(tǒng),其發(fā)生故障的概率明顯增加,因此研究其安全可靠性顯得尤為重要。基于嚴(yán)格的安全性能,多智能體系統(tǒng)的容錯(cuò)控制技術(shù)得到了快速發(fā)展,并取得了一系列研究成果[4-7]。
隨著多智能體系統(tǒng)規(guī)模的不斷擴(kuò)大,如何在有限的網(wǎng)絡(luò)寬帶資源中完成各個(gè)智能體之間數(shù)據(jù)的傳輸成為研究關(guān)鍵。目前,觸發(fā)機(jī)制主要分為時(shí)間觸發(fā)機(jī)制[8]和事件觸發(fā)機(jī)制[9]。時(shí)間觸發(fā)機(jī)制又稱等周期觸發(fā);事件觸發(fā)機(jī)制是在滿足觸發(fā)條件的情況下將數(shù)據(jù)傳輸至控制器端。因此多智能體系統(tǒng)中執(zhí)行器與控制器采用事件觸發(fā)機(jī)制明顯比時(shí)間觸發(fā)機(jī)制節(jié)約網(wǎng)絡(luò)資源。文獻(xiàn)[10]針對(duì)多智能體系統(tǒng),提出了一種新的具有狀態(tài)預(yù)測(cè)器的事件觸發(fā)機(jī)制,該機(jī)制可以對(duì)自身以及鄰域智能體的未來(lái)狀態(tài)作出預(yù)測(cè)。文獻(xiàn)[11]針對(duì)多智能體系統(tǒng)受到欺騙網(wǎng)絡(luò)攻擊,研究了事件觸發(fā)機(jī)制下的控制一致性問(wèn)題。以上研究均為多智能體系統(tǒng)在事件觸發(fā)下的一致性控制研究。
盡管在現(xiàn)有文獻(xiàn)中,容錯(cuò)控制研究已經(jīng)得到了長(zhǎng)足發(fā)展,但在多智能體系統(tǒng)的研究中仍主要集中在一致性控制問(wèn)題上,而關(guān)于多智能體系統(tǒng)的容錯(cuò)一致性問(wèn)題逐漸引起學(xué)界的關(guān)注。文獻(xiàn)[12]在有向拓?fù)浣Y(jié)構(gòu)下的無(wú)領(lǐng)導(dǎo)多智能體系統(tǒng)中,針對(duì)存在的執(zhí)行器偏移故障,基于混合無(wú)源/H∞性能指標(biāo)設(shè)計(jì)相應(yīng)的容錯(cuò)控制器,實(shí)現(xiàn)了系統(tǒng)的一致穩(wěn)定性。文獻(xiàn)[13]針對(duì)無(wú)領(lǐng)導(dǎo)的多智能體系統(tǒng),通過(guò)設(shè)計(jì)分布式控制器重新配置策略,研究執(zhí)行器故障下的H∞性能故障恢復(fù)控制問(wèn)題。
雖然多智能體系統(tǒng)的事件觸發(fā)、容錯(cuò)控制取得了一定的研究成果,但多局限于獨(dú)立設(shè)計(jì)。鑒于此,文中研究的重點(diǎn)是考慮跟隨多智能體系統(tǒng)可能發(fā)生的執(zhí)行器加性與乘性故障,通過(guò)設(shè)計(jì)自適應(yīng)律來(lái)設(shè)計(jì)自適應(yīng)容錯(cuò)控制器;同時(shí)引入事件觸發(fā)條件來(lái)減少網(wǎng)絡(luò)的傳輸,以到達(dá)節(jié)約資源的目的。
1 問(wèn)題描述
1.1 模型描述
設(shè)g={ν,β} 表示多智能體系統(tǒng)的通信拓?fù)浣Y(jié)構(gòu),其中ν={1,…,N}代表多智能體系統(tǒng)的節(jié)點(diǎn)集合,β?ν×ν代表多智能體之間的邊界集合。(i,j)∈β為智能體i到智能體j的一條邊,意味著智能體j可以獲取智能體i的信息。
設(shè)W=[aij]為g的鄰接矩陣,若(i,j)∈β,則有aij>0;否 則aij=0。設(shè)對(duì)角矩陣N=diag(dii)(i=1,…,N)為g的入度矩陣,其中;如果i≠j,則dii=0。定義拉普拉斯矩陣L=N-W=[lij],且有:
矩陣G=diag(g1,…,gN),其中g(shù)i為非負(fù)權(quán)值,當(dāng)且僅當(dāng)跟隨智能體i能接收到領(lǐng)航者的信息時(shí),gi>0;否則gi=0。令H=L+G表示領(lǐng)導(dǎo)-跟隨多智能體系統(tǒng)中網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu)。
引理1[14]對(duì)于領(lǐng)導(dǎo)-跟隨多智能體系統(tǒng),至少存在一個(gè)領(lǐng)導(dǎo)者,即gi>0,則矩陣H為正定的。
考慮領(lǐng)導(dǎo)-跟隨線性多智能體系統(tǒng)由N+1 個(gè)節(jié)點(diǎn)組成。領(lǐng)導(dǎo)多智能體與跟隨多智能體動(dòng)態(tài)方程為:

其中,x0(t)、xi(t)分別表示多智能體系統(tǒng)中領(lǐng)導(dǎo)者和跟隨智能體i的狀態(tài)變量;表示跟隨多智能體系統(tǒng)執(zhí)行器的故障模型;A、B是適當(dāng)維數(shù)的已知常數(shù)矩陣。
1.2 故障模型
對(duì)于領(lǐng)導(dǎo)-跟隨多智能體系統(tǒng),考慮跟隨多智能體系統(tǒng)的執(zhí)行器發(fā)生如下故障:

其中,θi、fi(t)分別為執(zhí)行器i的執(zhí)行效率因子和加性時(shí)變故障模型,ui(t)為智能體i的自適應(yīng)容錯(cuò)控制器。假設(shè)0 ≤-θi≤θi≤≤1,||fi(t)||≤,故可知θi=1,fi=0 表示智能體的執(zhí)行器為正常模式。
定義跟隨多智能體與其鄰域多智能體的跟蹤誤差為ξi(t)=-xj(t))+gi(xi(t)-x0(t)),故多智能體系統(tǒng)的測(cè)量誤差為eξi(t)=-ξi(t),其中,為滿足事件觸發(fā)條件的ξi(t)。
1.3 事件觸發(fā)機(jī)制
為了節(jié)約網(wǎng)絡(luò)通信資源,在多智能體系統(tǒng)中引入事件觸發(fā)機(jī)制,由事件觸發(fā)條件決定是否傳輸。對(duì)于每個(gè)跟隨多智能體系統(tǒng),文中考慮如下的分布式事件觸發(fā)機(jī)制條件:

定 義Ωi=((ρ-1)+(t)PBBTPeξi(t)+(δf+其中ρ、δ1、δf、δθ、μi、νi>0。
設(shè)計(jì)跟隨多智能體自適應(yīng)控制器:ui(t)=其中K為固定反饋控制增益矩陣,且K=BTP,矩陣P通過(guò)黎卡提方程求得。定義g(·)為如下函數(shù):
考慮di的自適應(yīng)律如下:

其中,τi為正定常數(shù)。
定義多智能體系統(tǒng)的跟隨者與領(lǐng)導(dǎo)者的動(dòng)態(tài)系統(tǒng)誤差為:

故由式(2)、(6)以及系統(tǒng)誤差可以得到閉環(huán)多智能體系統(tǒng)動(dòng)態(tài)誤差方程:

引理2[15](Young 不等式)對(duì)于任意的向量x,y∈Rn,下面不等式成立:

其中,ψ>0,p>1,q>1。
引理3[16](Barbalat’s)若函數(shù)x:? →? 關(guān)于t≥0一致連續(xù),并且下列極限存在并有界,則
2 主要結(jié)果
定理1對(duì)于多智能體系統(tǒng)式(2),在滿足事件觸發(fā)條件的情況下,自適應(yīng)律由式(6)給出,則在跟隨者存在執(zhí)行器故障的情況下,閉環(huán)多智能體系統(tǒng)動(dòng)態(tài)誤差方程(8)一致性是漸近穩(wěn)定的。即為:

證明:選擇如下的李雅普諾夫函數(shù)方程:

對(duì)于閉環(huán)方程(8)沿著時(shí)間t進(jìn)行求導(dǎo):

由定義g(·)的函數(shù)可知:

由多智能體系統(tǒng)的測(cè)量誤差和引理2 可得,存在任意η滿足:

應(yīng)注意在滿足上述過(guò)程的情況下,ω為一個(gè)足夠大的常數(shù)。通過(guò)所提出事件觸發(fā)條件可知,式(18)括號(hào)內(nèi)為非正數(shù),故可得下式:
由引理1 可知,存在正交矩陣U,使得

則可以得到:

其中通過(guò)黎卡提方程PA+ATP-PBBTP=-Q求出矩陣P、Q為正定常數(shù)。
對(duì)式(21)從t0→t進(jìn)行積分,同時(shí)由引理3 可得(Q)||ε||2dτ=0,則可知=0。綜上,多智能體系統(tǒng)中的跟隨智能體與領(lǐng)航智能體的狀態(tài)誤差趨近于零,則閉環(huán)多智能體系統(tǒng)動(dòng)態(tài)誤差方程(8)一直漸進(jìn)穩(wěn)定。
3 仿真算例
設(shè)有0 號(hào)領(lǐng)導(dǎo)者和1~4 號(hào)4 個(gè)跟隨者組成的多智能體系統(tǒng)無(wú)向拓?fù)浣Y(jié)構(gòu),如圖1 所示,其中鄰接矩陣和拉普拉斯矩陣分別為:
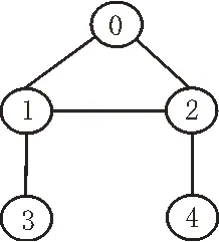
圖1 多智能體系統(tǒng)結(jié)構(gòu)圖
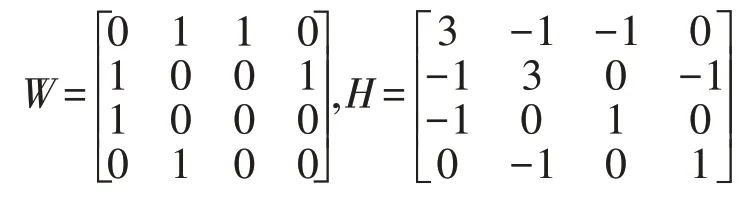
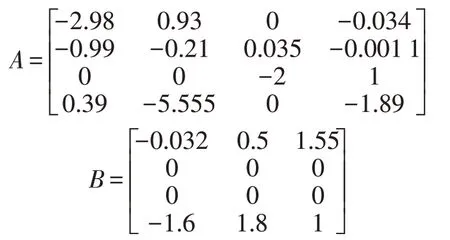
系統(tǒng)參數(shù)矩陣A、B分別為:
同時(shí)各個(gè)智能體的初始時(shí)刻為x0=[1,2,1,2]T,x1=[-2,-1,2,1]T,x2=[1,1,-1,1]T,x3=[1.5,1,2,-1.5]T,x4=[-2,2,1,1]T。其中di(0)=0,ρ=4,δ1=δf=δθ=0.01,μi=νi=0.001。
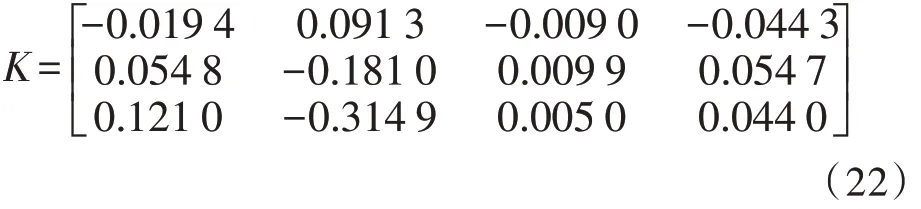
通過(guò)黎卡提方程可以求得反饋控制增益矩陣為:
對(duì)于執(zhí)行器故障θ1~θ4,f1~f4,考慮如下的故障模 型θ1=0.7,θ2=0.85,θ3=0.6,θ4=0.7,f2=[0.2 sin(t)+0.1,0,cos(t)]T,f1=f3=f4=0。
圖2 為智能體誤差響應(yīng)曲線,跟隨智能體1~4 與領(lǐng)導(dǎo)者的誤差在2 s 左右趨于一致。當(dāng)系統(tǒng)運(yùn)行到6 s 時(shí),系統(tǒng)出現(xiàn)以上描述的故障模型,系統(tǒng)誤差在8 s 左右趨于漸近穩(wěn)定并保持一致。圖3 為自適應(yīng)參數(shù)di的響應(yīng)曲線,在系統(tǒng)執(zhí)行器發(fā)生故障時(shí),控制參數(shù)di(i=1,…,4)的估計(jì)曲線收斂為某一常值。
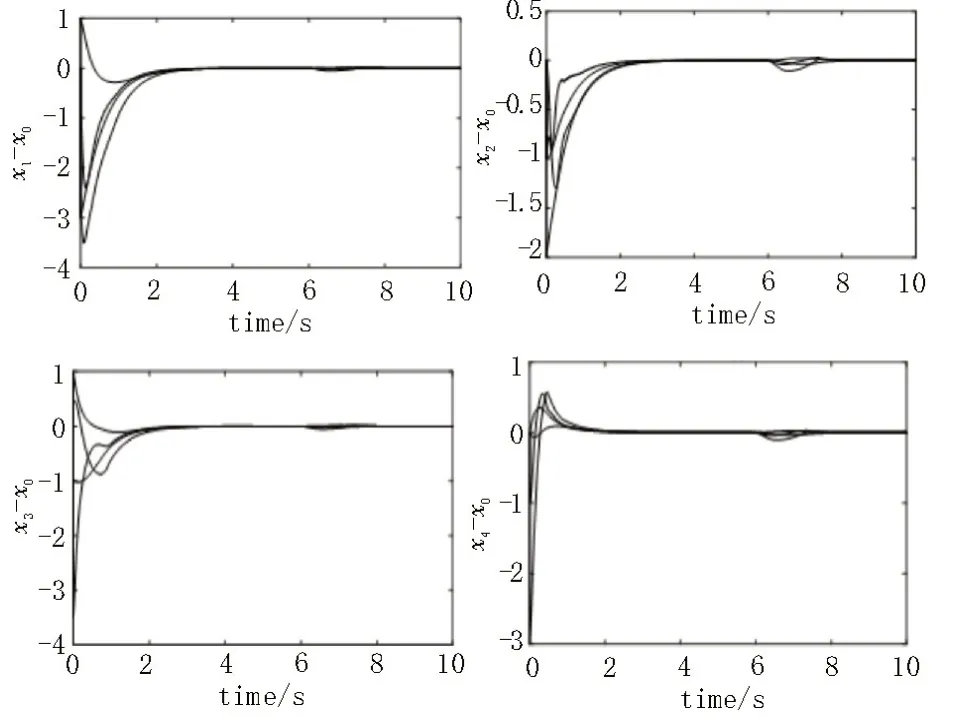
圖2 智能體i(i=1,…,4)誤差響應(yīng)曲線
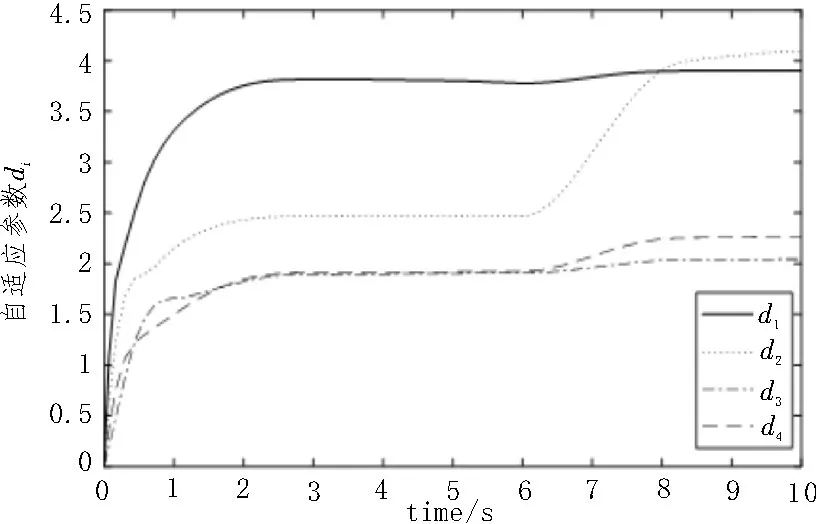
圖3 自適應(yīng)參數(shù)di(i=1,…,4)曲線
圖4 為智能體1~4 事件觸發(fā)的傳輸時(shí)刻。可以看出,在有限寬帶的條件下,文中通過(guò)引入事件觸發(fā)機(jī)制能夠在保證系統(tǒng)性能的前提下,對(duì)系統(tǒng)的控制器達(dá)到節(jié)約資源的目的。
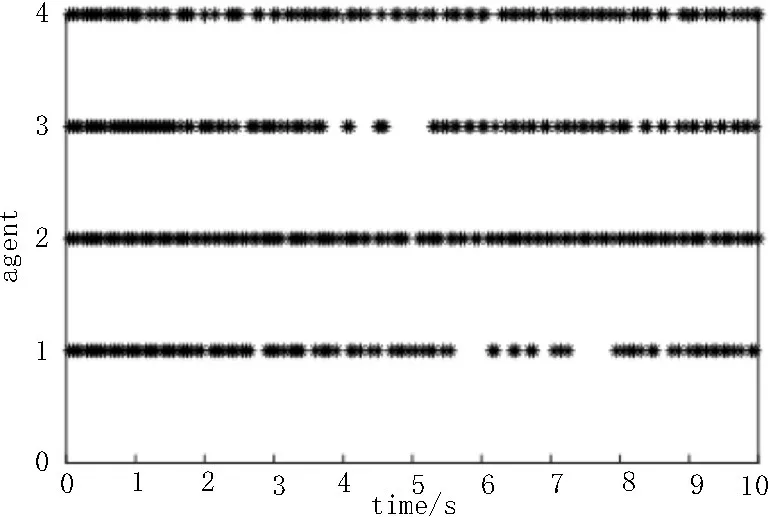
圖4 智能體i(i=1,…,4)事件觸發(fā)傳輸時(shí)刻
4 結(jié)論
文中針對(duì)領(lǐng)導(dǎo)-跟隨多智能體系統(tǒng),在系統(tǒng)中存在執(zhí)行器加性故障與乘性故障的情況下,研究了事件觸發(fā)機(jī)制下的自適應(yīng)容錯(cuò)控制器的設(shè)計(jì)方法。采用李雅普諾夫穩(wěn)定性理論設(shè)計(jì)自適應(yīng)容錯(cuò)控制器,能夠?qū)Χ嘀悄荏w系統(tǒng)的執(zhí)行器故障主動(dòng)容錯(cuò),從而使得系統(tǒng)動(dòng)態(tài)誤差系統(tǒng)是漸近穩(wěn)定的。同時(shí)事件觸發(fā)機(jī)制的引進(jìn),也達(dá)到了節(jié)約網(wǎng)絡(luò)通信資源的目的。
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:23:06
文苑(2018年21期)2018-11-09 01:22:32
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
中國(guó)衛(wèi)生(2015年9期)2015-11-10 03:11:12
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
