不同形式錨泊系統(tǒng)對海洋資料浮標水動力性能的影響
2022-03-14 02:58:46路寬饒翔王花梅張倩
兵工學報 2022年1期
路寬, 饒翔, 王花梅, 張倩
(國家海洋技術中心, 天津 300112)
0 引言
海洋資料浮標是海洋環(huán)境長期、連續(xù)、實時監(jiān)測的基本手段,是保障國家海洋安全、提高海洋科學研究水平、增強災害預警能力的重要技術保障。從20世紀40年代末開始,國外就開始了海洋資料浮標的研發(fā)工作,美國國家資料浮標中心從創(chuàng)立開始至今,一直致力于浮標體、錨泊系統(tǒng)、傳感器集成于通信等技術的研發(fā)工作。美國伍茲霍爾研究所作為海洋研究領域的領軍者,也有著多年海洋浮標的研制經(jīng)驗。伴隨著電子技術的進步,浮標的體積和質量不斷減小,建造成本不斷降低,而浮標測量及數(shù)據(jù)傳輸、可靠性的提高則加強了浮標連續(xù)工作的能力。浮標的研究重點也從優(yōu)化結構轉向優(yōu)化浮標的內(nèi)部系統(tǒng)。我國浮標研制工作起步于20世紀60年代,由單一參數(shù)測量浮標逐漸發(fā)展為多參數(shù)綜合監(jiān)測浮標,整體技術水平已接近世界先進水平,并擁有多種型號(直徑分別為10 m、6 m、3 m、2.4 m和2 m等)和不同功能(水文氣象監(jiān)測、海洋動力環(huán)境監(jiān)測、生態(tài)水質監(jiān)測、應急核輻射監(jiān)測等)的浮標,特別是10 m大型浮標和3 m小型浮標在國內(nèi)海洋環(huán)境監(jiān)測和海洋科學研究中發(fā)揮了重要的作用。
浮標在海上受到風、浪、流等作用時,不可避免地會發(fā)生搖蕩,進而影響浮標上測量儀器設備的測量精度,同時在各種載荷作用下浮標會發(fā)生大范圍位移,因此對其錨泊系統(tǒng)設計提出了更高要求。與其他海洋工程裝備相比,浮標的錨泊系統(tǒng)所占比重較大,錨泊系統(tǒng)對標體的運動和受力影響較大,耦合效應明顯,對其進行相關的水動力特性分析十分必要。因此,研究浮標及其錨泊系統(tǒng)的水動力特性,驗證其能否在復雜海況下工作,提高觀測要素的測量精度,一直是海洋資料浮標設計與研制的重點問題。
目前,對于浮標水動力特性研究的主要方法包括理論分析、數(shù)值模擬、物理模型試驗和現(xiàn)場觀測試驗。其中理論分析需要建立理想的模型,對浮標系統(tǒng)進行各種簡化處理,而浮標系統(tǒng)在海上風、浪、流等環(huán)境載荷作用下的運動與動力響應,屬于一個較復雜的力學問題,因此理論分析的范圍比較局限。現(xiàn)場觀測試驗雖然是海洋浮標最直接、準確的研究方法,但是試驗成本較高。隨著計算機技術及試驗能力的提升,數(shù)值模擬與物理模型試驗成為海洋浮標最主要的研究手段,在數(shù)值模擬方面,F(xiàn)luent、AWQA、ADAMS、RecurDyn等數(shù)值模擬工具可很好地進行流體與固體耦合、多體動力學和錨泊系統(tǒng)的非線性等水動力學分析。在物理模型試驗方面,多個大型多功能波浪水池的建立為浮標模型試驗提供了完備的試驗平臺。盡管如此,我國對于海洋浮標系統(tǒng)的研究仍需要進一步深入,這是因為雖然我國浮標現(xiàn)場觀測數(shù)據(jù)較為豐富,但對于數(shù)據(jù)準確性的驗證手段仍需進一步提高。同時,我國采用數(shù)值模擬研究較多,而物理模型試驗仍不夠系統(tǒng),二者之間的驗證也不夠充分。
本文針對威海海域水文情況,采用數(shù)值模擬與物理模型試驗相結合的方法,對風浪作用下半拉緊式、倒s式和松弛式3種不同錨泊系統(tǒng)對海洋浮標水動力性能的影響進行研究與分析,所得研究結果對于國家海洋試驗場海洋浮標的研制及其他浮標應用,具有重要參考意義。
1 威海海域情況與錨泊系統(tǒng)方案
山東威海北部褚島海域,需要布置3 m多參數(shù)海洋綜合浮標以長期、實時觀測海域的水文氣象等環(huán)境背景場情況,由于該海域需要建設國家海洋綜合試驗場,服務于我國海洋儀器設備科技創(chuàng)新、成果轉化與業(yè)務化應用,對海域環(huán)境背景場數(shù)據(jù)的要求較高。該海域四季分明,與同緯度的內(nèi)陸相比,具有雨水豐富、氣溫適中、氣候溫和的特點,屬溫帶季風型氣候。根據(jù)2008年威海氣象臺實測資料統(tǒng)計,全年平均風速4.1 m/s,全年各向風速大于5.4 m/s的概率為28.8%,風速大于8 m/s的概率為8.3%。2013年與2015年,國家海洋技術中心分別采用了松弛式與半拉緊的錨泊方式對海域進行了全年的波浪觀測。其中2013年的觀測數(shù)據(jù)按月份統(tǒng)計如表1所示。
錨泊系統(tǒng)的方案參照美國國家資料浮標中心規(guī)定,浮標錨泊系統(tǒng)根據(jù)布放水深不同,可以分為淺海 區(qū)、中等深度海區(qū)、深海區(qū)3種標準型式。在水深小于60 m淺海區(qū),采用全錨鏈松弛式系留,錨泊系統(tǒng)深長比根據(jù)海流強弱來確定,一般為1∶3~1∶5;對于水深介于60~600 m中等深度海區(qū),一般采用半拉緊式錨鏈與尼龍繩混合串接的系留方式,錨泊系統(tǒng)深長比為1∶0.9;水深600 m以上的海區(qū),錨泊系統(tǒng)采用倒s式系統(tǒng),采用錨鏈、浮球、聚丙烯纜等組成,深長比小于1∶1.25.考慮到由于該海域的水深約70 m,介于淺水與中等水深之間,因此有必要對風浪作用下,3個不同錨泊系統(tǒng)形式下的水動力性能進行研究與分析,以確定最佳方案。
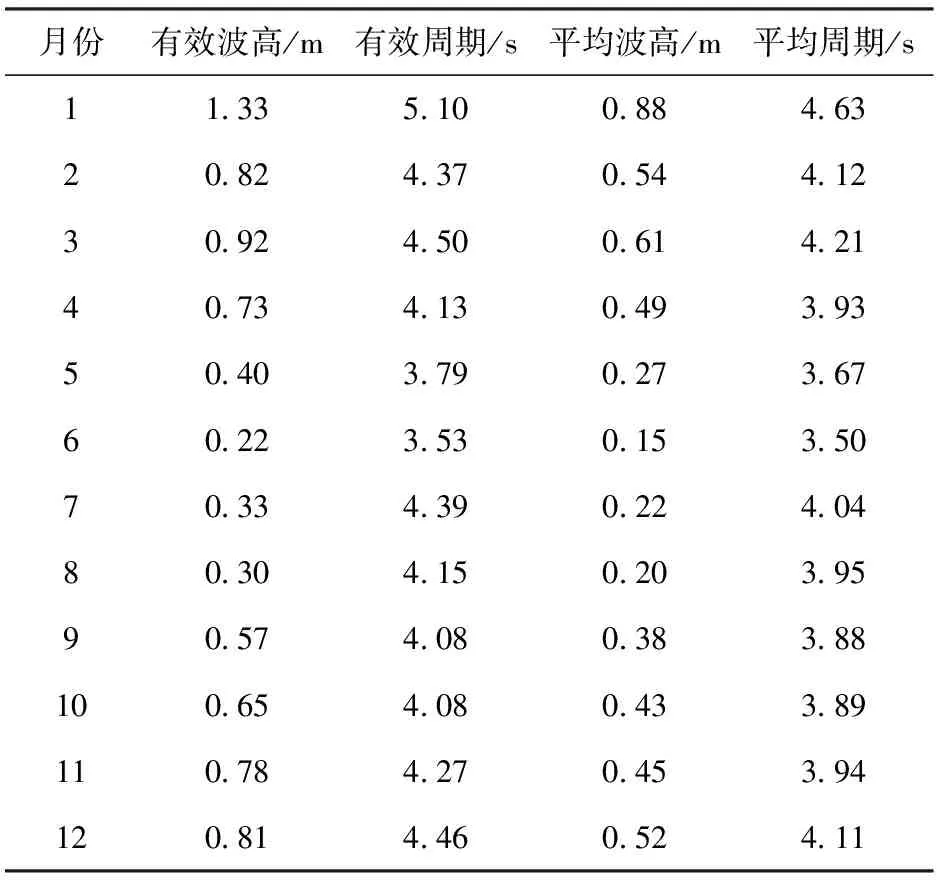
表1 褚島2013年實測波浪數(shù)據(jù)統(tǒng)計Tab.1 Measured wave data of Chu Island in 2013
2 數(shù)值模擬
2.1 模擬方法
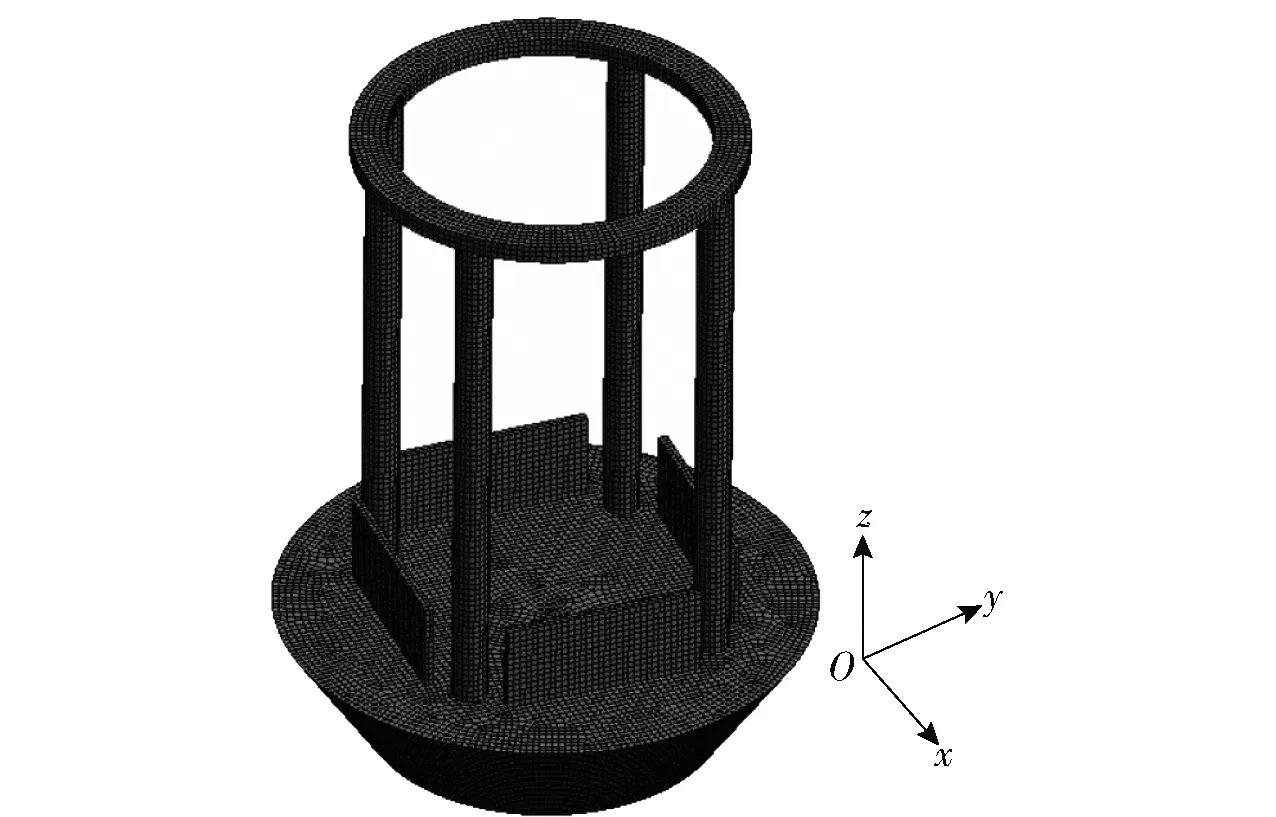
圖1 海洋資料浮標數(shù)值模型及網(wǎng)格劃分Fig.1 Numerical model and mesh of ocean data buoy
海洋資料浮標的數(shù)值網(wǎng)格模型、網(wǎng)格劃分及坐標系如圖1所示,其中為模型坐標系,沿軸方向正向為風浪的進行方向。
利用ANSYS AQWA軟件模塊,對海洋資料浮標原型進行數(shù)值模擬計算,其主要環(huán)境參數(shù)與浮標原型尺寸如表2所示。
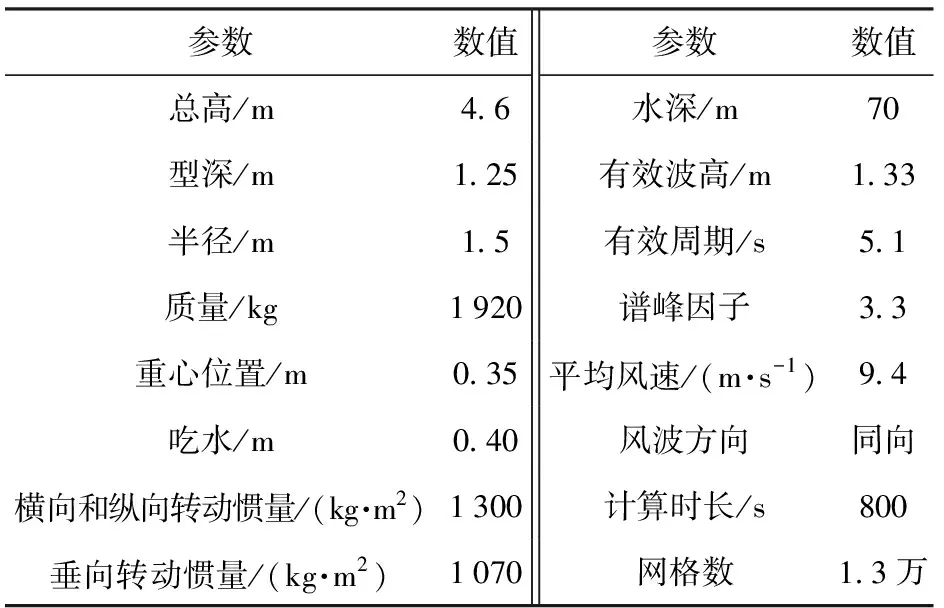
表2 主要環(huán)境參數(shù)與浮標原型尺寸Tab.2 Main enviromental parameters and buoy prototype sizes
對3種不同錨泊系統(tǒng)形式進行數(shù)值計算,其中,錨鏈的截面面積為0003 m,剛度為23×10N/m基于海上試驗場當?shù)厮顬?0 m,設置半拉緊式的錨鏈長度為72 m,懸鏈模型采用線性模型,單位寬度質量為5 kg/m;松弛式與倒s式的錨鏈長度取3倍水深,即210 m;懸鏈模型采用非線性模型,懸鏈微元420個,單位寬度質量為5 kg/m,其中浮力纜部分設為零浮力。
考慮到波浪對于浮標的作用力中流體黏性的影響相對較小,對運動和載荷的計算可以忽略,因此采用三維勢流理論進行水動力計算,即假設流體是不可壓縮、無黏性和無旋的。同時對時間項采用頻域和時域兩種計算方法,并考慮輻射阻尼的作用,對浮標水動力系數(shù)和運動響應進行數(shù)值計算分析。控制方程如(1)式所示:

(1)
式中:為速度勢,海表邊界條件應滿足:

(2)
為重力加速度,海底邊界條件應滿足:

(3)
為水深。考慮靜水回復力和波浪入射和繞射的作用下,1階頻域運動方程為

(4)
式中:為質量矩陣;為附加質量矩陣;為入射波頻率;為浮標在6個自由度的位移,取1~6,分別對應縱蕩、橫蕩、升沉、橫搖、縱搖、艏搖;為輻射阻尼矩陣;為回復力矩陣;為1階波浪力矩陣。
除了進行頻域計算分析,還對浮標體在各種受力條件下時域運動狀態(tài)進行計算,其中波浪荷載與風荷載是作用在浮標上的主要荷載。波浪荷載作用浮標時可利用莫里森公式計算:

(5)

風荷載主要作用在浮標水面以上的部分,以水平分量為主,垂直分量可忽略不計,其大小為
=0613,
(6)
式中:為風荷載;、分別表示浮標體受風構件的高度系數(shù)和形狀系數(shù),其中由于浮標在海面上高度低于153 m,故高度系數(shù)取10,形狀系數(shù)中海面上浮標體部分取05,太陽能電池板取10,塔架桿件取13;為風速(m/s);為構件垂直于風向的正投影面積面積。
當風浪荷載耦合時產(chǎn)生了耦合運動,其時域耦合運動方程為

(7)
式中:、分別為線性和二次阻尼矩陣;為每個單元的矢量函數(shù);為激振力矢量,主要包括風力、1階波浪力、2階波浪力和其他作用力等。
2.2 計算結果
采用頻域計算模塊對浮標的水動力性能進行了計算,浮標垂蕩、縱搖的運動響應幅值算子(RAO)曲線分別如圖2(a)、圖2(b)所示。從垂蕩RAO曲線可以看出:曲線逐漸接近于1,說明浮標在大周期的情況下隨著波浪做等輻振動,隨波性良好;波浪在常見波浪范圍內(nèi),縱搖運動穩(wěn)定且幅值較小,特別是長周期波浪縱搖非常小,浮標姿態(tài)比較穩(wěn)定,縱搖固有周期為1.86 s.

圖2 垂蕩與縱搖RAOsFig.2 Heaving and pitching RAOs
采用時域模塊,對風浪同時作用下3種不同錨泊系統(tǒng)的浮標姿態(tài)與錨鏈受力情況進行計算,重點比較橫搖、縱搖與錨鏈拉力的情況,結果如圖3~圖5所示。從圖3~圖5中可以看出:半拉緊式的浮標橫搖角與縱搖角最小,平均橫搖角為0.8°,平均縱搖角為5.9°,倒s式的橫搖角與縱搖角最大,平均橫搖角為5.3°,平均縱搖角為6.3°,松弛式計算結果介于二者之間;倒s式錨鏈受拉力最小,平均值為550 N,半拉緊式錨鏈受拉力最大,平均值為2 360 N,前者是后者的23%.

圖3 3種錨泊系統(tǒng)橫搖對比Fig.3 Rolling comparison of three types of mooring systems

圖4 3種錨泊系統(tǒng)縱搖對比Fig.4 Pitching comparison of three types of mooring systems
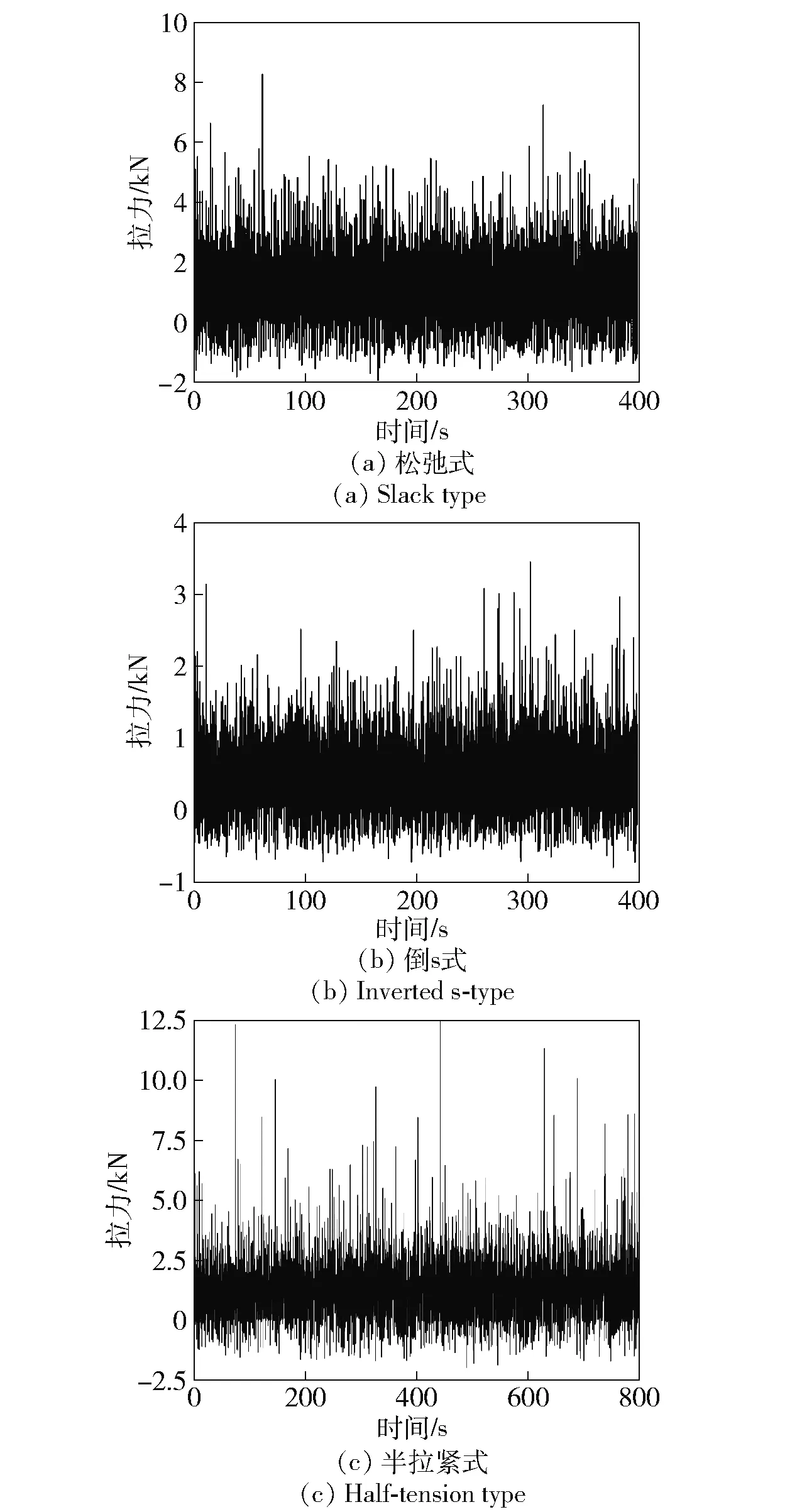
圖5 3種錨泊系統(tǒng)拉力對比Fig.5 Tensile force comparison of three types of mooring systems
3 物理模型試驗
3.1 試驗系統(tǒng)及布局
試驗在自然資源部國家海洋技術中心動力環(huán)境實驗室中進行,本次海洋資料浮標的物理模型試驗設施及設備包括:
1)多功能水池:長130 m,寬18 m,池深6 m,試驗水深4.5 m.
2)造波機:自研制10單元伺服電機驅動式推板造波機,最大波高0.6 m,周期范圍0.5~5.0 s,由上位機軟件控制,可模擬產(chǎn)生規(guī)則波和不同譜型的不規(guī)則波。
3)造風系統(tǒng):自研制,由16單元軸流風機組成,最大風速10 m/s.
4)雙線性型BG-II波高傳感器:量程0~1 m,精度0.2%.
5)Testo熱敏風速儀405i:量程0~30 m/s,精度±0.1 m/s+測量值的5%。
6)DDEN水下拉力傳感器:量程250 N,精度0.1%.
7)6自由度非接觸姿態(tài)測量系統(tǒng):自研制,三光學鏡頭組成,量程6 m×6 m,搖擺角誤差±1.5°,水平位移誤差1.5 mm,垂蕩誤差2 mm.
按照我國海洋行業(yè)標準HY/T 0299—2020 海洋觀測儀器設備室內(nèi)動力環(huán)境模型試驗方法 總則規(guī)定進行試驗布局。試驗系統(tǒng)包括試驗環(huán)境模擬裝置、浮標模型與測量采集系統(tǒng)。其中,試驗環(huán)境模擬裝置包括造波機與造風機。前者為10單元伺服電機驅動式推板造波機,最大波高0.6 m,周期范圍0.5~5.0 s,由上位機軟件控制,可模擬產(chǎn)生規(guī)則波和不同譜型的不規(guī)則波,消波灘可消除90%的反射波。后者為16單元軸流風機組成的造風機,最大風速10 m/s,可由上位機軟件控制不同的風速。浮標模型包括浮體及其錨泊系統(tǒng),錨泊系統(tǒng)可進行更換。測量采集系統(tǒng)包括:波高儀、風速儀、6自由度姿態(tài)儀及拉力傳感器。各測量傳感器集成在數(shù)據(jù)采集系統(tǒng)中,保持數(shù)據(jù)的同步性。
浮標模型布放在距造波機30 m,距造風機20 m處,波高儀與風速儀布放在模型前5 m處,水下拉力傳感器安裝在模型與錨泊系統(tǒng)連接部位,6自由非接觸姿態(tài)測量系統(tǒng)布置在模型背浪一側的斜上方距離5 m附近,如圖6所示。試驗前需在模型上安裝標志點,以滿足測量需要。試驗儀器均在計量有效期內(nèi),試驗前也均進行了標定。

圖6 試驗布局Fig.6 Test layout
3.2 模型及相似準則
根據(jù)實驗室試驗能力與浮標原型尺寸,確定模型比尺為1∶5,設計時首先考慮滿足幾何相似,除幾何相似外,浮標模型還滿足了慣性矩和自搖周期相似,并且滿足重力相似;其3種錨系結構的組成,除滿足長度等幾何相似外,還滿足了質量和彈性相似。由于本次模型試驗,水的黏滯力不是主要作用力,試驗中并沒有考慮雷諾數(shù)的影響。
試驗前,首先進行壓載調整,并通過調整壓載分布調整質量、重心與轉動慣量,使其達到目標值。模型考慮了上層結構及其搭載傳感器等,以保證能夠較合理的模擬原型的受風面積。模型主要參數(shù)如表3所示。

表3 模型主要參數(shù)Tab.3 Parameters of model
試驗中采用3種錨系方案如圖7所示,分別為松弛式、倒s式和半拉緊式。松弛式錨泊系統(tǒng)由錨鏈- 彈簧- 錨鏈組成,倒s式由錨鏈- 浮力纜- 普通纜- 錨鏈組成,半拉緊式由錨鏈- 普通纜- 錨鏈組成,錨塊質量為20 kg,錨鏈質量與尺寸與原型保持相似。試驗前對錨泊系統(tǒng)的水平剛度進行了驗證。

圖7 3種錨泊系統(tǒng)示意圖(上)與模型(下)Fig.7 Sketch map (upper) and models (below) of three types of mooring systems
3.3 試驗工況
威海海域四季分明,冬季受季風影響顯著,風浪較大,春季季風轉向,風浪逐漸減小,由于所在海域緊鄰大陸,受夏季季風向影響的風浪無法成長,故夏季風浪較小。基于上述分析將海域海況按季節(jié)進行劃分開展試驗,同時對極值月(1月)作為單獨工況進行試驗,以驗證其在惡劣海況下的水動力性能。原型實際海況如表4所示。
根據(jù)原型工作海況,按照縮尺比計算,得到試驗工況如表5所示,3種錨泊系統(tǒng)方案、每組5個工況,共計15組工況。試驗中,首先繼續(xù)風場模擬,待風場穩(wěn)定后,進行不規(guī)則波模擬。不規(guī)則波采用北海聯(lián)合海浪計劃譜,每組工況保證采集到波個數(shù)大于100.

表4 原型實際海況Tab.4 Actual sea conditions of prototype

表5 模型試驗工況Tab.5 Test conditions of model
3.4 試驗過程與結果分析
采用最具代表性的極值月(工況5)試驗結果,對3種錨泊系統(tǒng)下浮標模型的響應進行分析。首先,對于松弛式錨泊系統(tǒng)試驗,結果如圖8所示。由圖8可見:錨鏈所受最大的瞬時拉力13.3 N(見圖8(c));模型在原點0.2 m附近進行小幅度橫蕩運動(見圖8(d));由于風的作用,模型首先產(chǎn)生了1.5 m的縱蕩運動,當波浪作用于模型后,模型在1.0 m范圍內(nèi)進行較大范圍的運動(見圖8(e));模型的垂蕩幅度與波幅相近,隨波性良好;模型有較大的搖擺運動,最大縱搖角達到20°(見圖8(h)),橫搖運動不明顯,維持在4°范圍內(nèi)(見圖8(g));風的作用對初始艏搖角影響較大,穩(wěn)定后,在風浪聯(lián)合作用下,艏搖角維持在40°范圍內(nèi)(見圖8(i))。

圖8 松弛式錨泊系統(tǒng)模型試驗結果Fig.8 Test results of slack type mooring system model
倒s式錨泊系統(tǒng)試驗結果如圖9所示。由圖9可見:錨鏈所受最大的瞬時拉力僅為10 N(見圖9(c));模型在原點1 m附近進行大幅度橫蕩運動(見圖9(d));由于風的作用,模型首先產(chǎn)生了3 m左右的縱蕩運動,當波浪作用于模型后,模型在1 m范圍內(nèi)進行較大范圍的運動(見圖9(e));模型的垂蕩幅度同樣與波幅相近,隨波性良好;模型產(chǎn)生了顯著的搖擺運動,最大橫搖和縱搖角都達到了15°以上(見圖9(g)與圖9(h));艏搖角沒有明顯的穩(wěn)定位置,在風浪聯(lián)合作用下存在60°左右的運動范圍(見圖9(i))。
對于半拉緊式錨系試驗,結果如圖10所示。由圖10可見:錨鏈所受最大瞬時拉力超過了80 N(見圖10(c));浮標模型在較小的范圍內(nèi)做橫蕩與縱蕩運動(見圖10(d)與圖10(e));模型的垂蕩運動明顯受到錨鏈拉力的影響,向水下方向的位移較大(見圖10(f));模型的搖擺運動相對前兩組的試驗結果較小,其中橫搖平均值為0.69°(見圖10(g)),縱搖平均值為1.15°(見圖10(h));風的作用對初始艏搖角影響較大,穩(wěn)定后,在風浪聯(lián)合作用下,艏搖角維持在20°范圍內(nèi)(見圖10(i))。
將試驗結果通過比尺換算,得到原型數(shù)據(jù)如表6所示。通過圖3~圖5與圖8~圖10對比來看,對于3種錨泊系統(tǒng)的定性結論是一致的:在松弛式、倒s式與半拉緊式3種錨泊系統(tǒng)方案中,采用半拉緊式錨泊系統(tǒng),浮標模型的搖蕩更小,可獲取到更為準確的觀測數(shù)據(jù),但是錨鏈所受拉力最大;倒s式錨泊系統(tǒng)錨鏈所受拉力小、可靠性高,但是搖蕩較大;松弛式錨泊系統(tǒng)的試驗結果則介于半拉緊式和倒s式之間。如果定量來看,通過對比分析,數(shù)值計算與物理模型試驗結果在拉力、橫搖、縱搖有大約10%左右的偏差,造成偏差的原因有以下3個方面:1)計算軟件的原因,ANSYS AQWA軟件基于勢流理論,在計算的過程中存在很多的假設;2)試驗環(huán)境產(chǎn)生的誤差,風場質量和反射波的影響都會對試驗結果造成影響;3)試驗過程中出現(xiàn)的不確定性因素,試驗中,波高儀、風速儀、姿態(tài)儀、拉力計,都存在著系統(tǒng)誤差,會對結果造成影響。
由表6可以看出:
1)倒s式錨泊系統(tǒng)的布放較方便,由于其系泊纜所受拉力較小,其抵抗極端環(huán)境的能力更強,維護周期更長。但其浮標在風浪作用下?lián)u擺比較劇烈,因此觀測數(shù)據(jù)的準確度會受到較大的影響,數(shù)據(jù)應采用相關算法進行修正后方可應用。
2)半拉緊式錨泊系統(tǒng)的定點觀測效果最好,巡航半徑較小,同時由于其在風浪作用下?lián)u擺角更小,其內(nèi)置的波浪傳感器、搭載的風速傳感器等獲取的數(shù)據(jù)更為準確,但是其對錨泊系統(tǒng)要求較大,系泊纜所受瞬時拉力較大,長期使用會產(chǎn)生疲勞,應定期進行巡檢和維護。
3)松弛式浮標工作姿態(tài)和錨泊系統(tǒng)可靠性介于半拉緊式和倒s式之間,在選擇錨泊系統(tǒng)方式時,還應根據(jù)具體情況進行分析與判斷。

圖9 倒s式錨泊系統(tǒng)模型試驗結果Fig.9 Test results of inverted s-type mooring system model
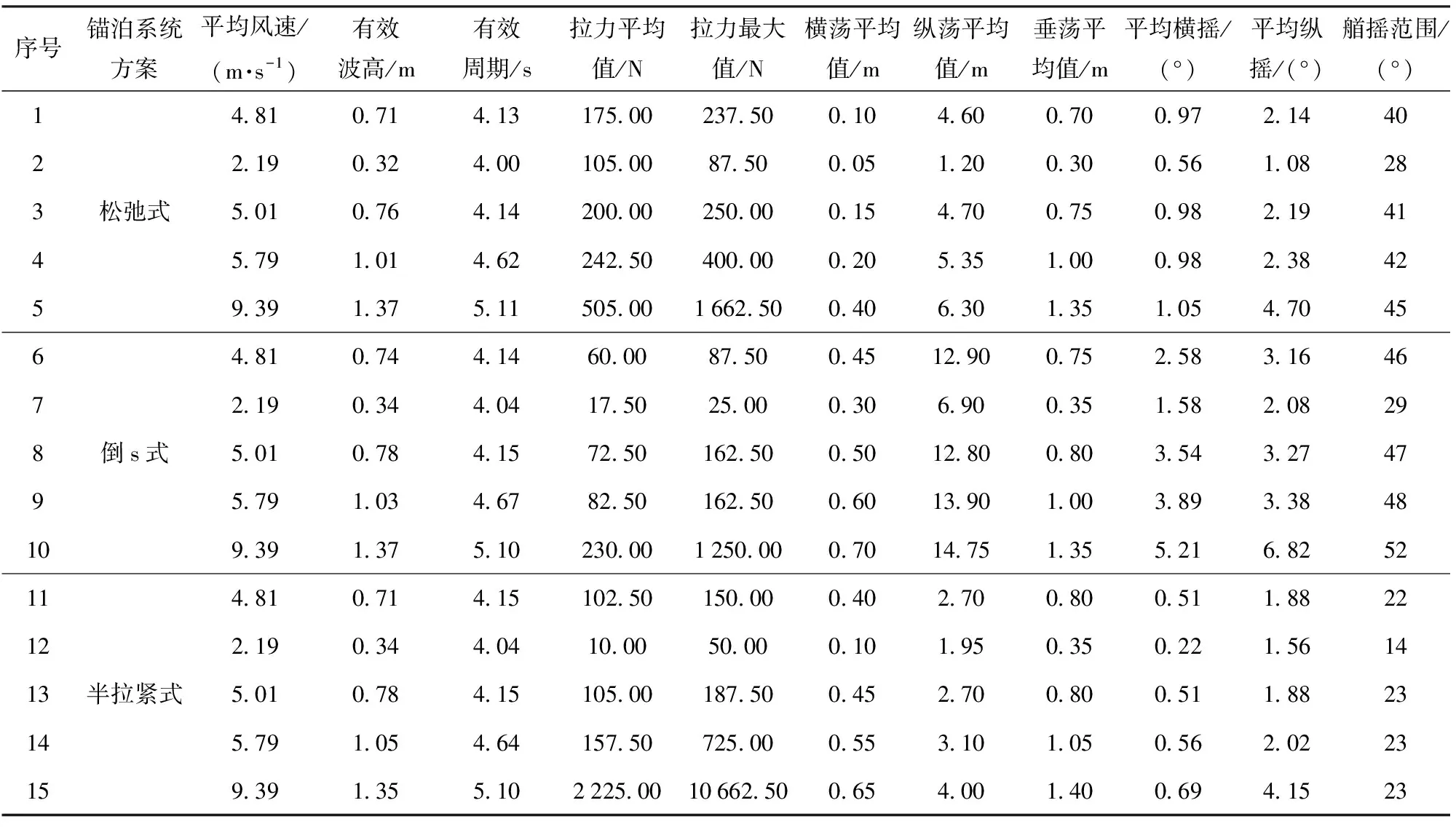
表6 原型數(shù)據(jù)統(tǒng)計表

圖10 半拉緊式錨泊系統(tǒng)模型試驗結果Fig.10 Test results of half-tension type mooring system model
4 結論
本文采用數(shù)值模擬與物理模型試驗研究的方法,針對3種典型不同錨泊系統(tǒng)方案,采用威海海域實測數(shù)據(jù),對海洋浮標在風浪聯(lián)合作用下的水動力性能進行研究與分析,通過試驗不僅定性分析了不同方案的優(yōu)缺點,而且得到了相對準確的定量分析結果,為今后類似研究提供了方法參考。得到如下主要結論:
1)在松弛式、倒s式與半拉緊式3種錨泊系統(tǒng)方案中,采用半拉緊的錨泊系統(tǒng)可獲取到更為準確的觀測數(shù)據(jù),倒s式的錨泊系統(tǒng)可靠性則更高,松弛式的錨泊系統(tǒng)的性能則介于二者之間。
2)國家海洋綜合試驗場(威海)作為國家海洋儀器裝備公共試驗與測試平臺,對海域背景數(shù)據(jù)的準確性要求較高。本文研究成果已應用在建立該試驗場場區(qū)海洋環(huán)境背景場所需的浮標觀測系統(tǒng)中,運行狀態(tài)良好。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
