無人機航測大比例尺地形圖的探索和精度分析
2022-03-12 04:12:56聶雄林
中國新技術新產品 2022年23期
聶雄林
(新干縣自然資源局,江西 吉安 331300)
密集建成區的1 ∶500 大比例尺地形圖測繪因施測難度大和工作量大,傳統測繪方法外業需要派出大量的外業測繪員,測繪成本高而且效率低[1]。傳統航空航天攝影測量具有效率高、成本高、現勢性差以及精度低的特點,一般用于大范圍小比例尺測繪任務[2]。隨著無人機航測技術水平的發展,無人機航測大比例高精度地形圖成為現實。目前無人機航測普遍搭載的是五鏡頭相機,在航拍時會產生很多不必要的冗余照片,照片量大且數據量大,創建三維模型時需要多臺電腦集群處理,硬件成本投入較高[3]。
在房屋密集的村莊等復雜地形情況下,房屋間的間距都很小,巷距經常是幾十公分,房前屋后樹木綠化較多[4]。由于遮蔽嚴重,當無人機搭載五鏡頭相機進行航測時,受遮擋部分的模型結構存在黏連、紋理失真、扭曲變形的情況,后期無法刺點繪制線畫地形圖,精度也大受影響。筆者結合項目實例探索使用高像素單鏡頭相機進行傾斜攝影測量,觀察其創建的三維模型紋理清晰度等情況,并對最終線畫圖成果進行精度檢查分析。
1 測區概況
該項目測區位于新干縣河西某個村莊,面積約80000m2。屬于丘陵地形,海拔高度為33 m~38 m,地勢起伏不大,周邊無較大山體,該測區及周邊區域不屬于禁飛區域。村莊內部巷道地面基本都用水泥硬化,便于像控點噴涂,由于房屋密集,巷子狹窄,樹木較多,給像控點的選擇帶來不便,選擇位置時須謹慎,盡量選擇較空曠的村內小廣場或無遮擋的村內硬化地面,滿足像控點刺點時有效照片的數量。測區內及周邊300 米范圍無超過50 米高度的建筑物和構筑物,飛行高度選擇空間較大。航拍當日天氣晴朗,風力為1 級~3級,溫度28 ℃,能見度為1 km 以上,氣象條件較好。
2 項目實施
2.1 作業流程
項目傾斜攝影測量流程分航前準備及檢查、航空攝影數據采集、內業建模成圖和測繪成果檢查4 個階段。航前準備及檢查包括規劃航線、測設像控點、無人機平臺以及掛載傳感器硬件檢查等;數據采集階段即是無人機搭載傳感器設備,根據規劃的航線飛行,對地面地物影像數據進行采集,包括一個垂直視角影像和4 個傾斜視角影像;建模成圖階段空三解算、模型重建時軟件都會生成質量報告,如質量報告顯示結果不符合規范要求時,須查找原因,必要時要返工重新航測;成果檢查階段外業施測量檢查點時要選擇一些固定的棱角分明的特征點,例如房角點、門墩角點等,如圖1 所示。

圖1 航空傾斜攝影測量流程圖
2.1 選擇起降點
在選擇起降點時,盡量選擇測區中間航線兩側的地方作為起降點,以便將數傳電臺傳輸距離最大化,且須選擇空曠人流較少的地方,禁止在人流車流交通量大的馬路、鄉間道路上、樹木下方、電線通信線路下方、房屋周圍起降無人機,以免發生碰撞事故,周圍10 m 內應無人員活動。測區呈東西向分布,有村內巷道環繞通行,但時常有人員車輛通行,且東西兩端距離約500 米,測區內沒有高大的建筑物遮擋,能保證數傳電臺的有效傳輸距離,考慮到安全因素,因此將起降點設置在測區東北角的村委會院內空曠地上,起降點位置如圖2 所示。

圖2 起降點及像控點位置示意圖
2.2 航線規劃
根據傾斜攝影三維模型重建的要求,需要從垂直和傾斜多個角度對地面目標的影像數據進行采集。五鏡頭相機一般是由一個垂直鏡頭、4 個45°傾斜鏡頭來采集地面影像。我們規劃了一條垂直攝影航線和四條傾斜攝影航線。為了盡可能地創建更清晰和精度更高的三維模型,選定飛行高度為84m,起飛速度為14m/s,航線速度為8.5m/s,傾斜航線速度為15m/s。地面分辨率1.05cm/像素,傾斜分辨率1.49cm/像素。旁向重疊率75%,航向重疊率80%,傾斜旁向重疊率78%,傾斜航向重疊率82。當日風向為由南向北吹,所以設置主航線角度0°,盡量避免飛機橫向側風。航線布設如圖3 和圖4 所示(只附了1 條垂直攝影和1 條傾斜攝影航線)。

圖3 垂直攝影航線1

圖4 傾斜攝影航線2
2.3 布設像控點
一般來說,像控布設要遵循標注清晰、視野開闊、均勻分布、覆蓋測區、像控位置固定、像控布設在無高差平面上的原則;同時還要以外業無人機能清晰明顯拍攝,內業能夠容易準確找到為標準。由于無人機傾斜攝影測量空三的精度最弱點位于測區的邊緣,而不在測區的中間地帶,測區中間精度較高而且比較均勻,精度最差點在測區的邊緣。適當增加像控點數量和密度,能在一定程度上提高空三解算的精度,但并不是像控點越多越密越好,過多過密的布設像控點,對空三解算的精度提高并沒有起到明顯的作用,反而會大大增加外業布設像控點和內業刺點的工作量,性價比較低,得不償失。在條件允許的情況下,像控點應該均勻布設在測區可攝范圍內,且要加強測區邊緣地帶的網控制力度,像控點上方無遮擋,截止高度角45°,即天頂角45°內無物體遮擋。這種滿足測區四圍控制,適當增加測區內部像控點布設的方式可以在滿足精度要求條件下減少控制點的數量,還可以有效改善區域四周的精度。因項目測區范圍面積不大,充分考慮現場適合布設像控點的位置條件,為提高工作效率,布設6 個像控點,其中K5 作為檢查點。像控點布設位置如圖2 所示。像控點用紅油漆涂成“L”型,使用RTK 測量坐標,用GNSS 架站方式以控制點的標準量測。坐標參考系統為國家2000 坐標系、85 黃海高程基準,擬和高程;采用千尋網絡RTK 固定解,設定兩測回,每測回10 次平滑方式記錄數據。
2.4 無人機航空傾斜攝影采集地面數據
在開始飛行作業前,要進行航前檢查,飛機腳架和掛載的相機是否按規定牢固安裝到位。為保障任務安全,起飛前結合飛行控制軟件進行自動檢測,確保飛機的GPS、通信鏈路等信號狀態良好,避免在航拍中危險情況的發生。無人機起飛后,要通過遙控器實時觀測飛機的飛行參數,如電量、飛行時間以及飛行高度等。在城市和建筑密集區,航攝區域備選起降點較少時,就會出現當前架次航攝區域與起降點距離很遠的情況。因此,在起飛前設置合適的電臺斷開時間。并根據飛行時長在航攝區內選擇合適的地點提前去等待飛機,保證電臺能及時連上飛機,避免電臺斷開時間過長,出現飛機在航線未飛完時便自動返航的情況。飛機在轉彎過程中容易出現信號斷開情況,因此等待點要選擇在交通便利、地勢開闊的地方,盡量選擇航程中段的航帶中部位置。測區內沒有能擋住電臺信號的高大建筑,所以在航線執行過程中只需要時刻關注遙控器飛控軟件顯示的通信鏈路信號情況。飛行任務持續了53 min,五條航線飛行總長度25 114 m,共采集了2 567 張地面照片。
2.5 重建三維模型
將航測外業采集到的地面照片導入建模軟件,設置好坐標系就可以進行空三解算,圖5 中地面點為不同照片的同名像點,空中點為每張照片的空中采集點。空三解算的質量結果見表1 和表2,平面坐標X中誤差為1 cm,Y中誤差0.6 cm,高程中誤差1.9 cm。精度符合規范要求,進行下一步重建三維模型。將坐標系等參數設置好后進行模型重建,模型重建的質量報告內的質量情況與空三時一致,說明外業航測數據的精度質量比較好。
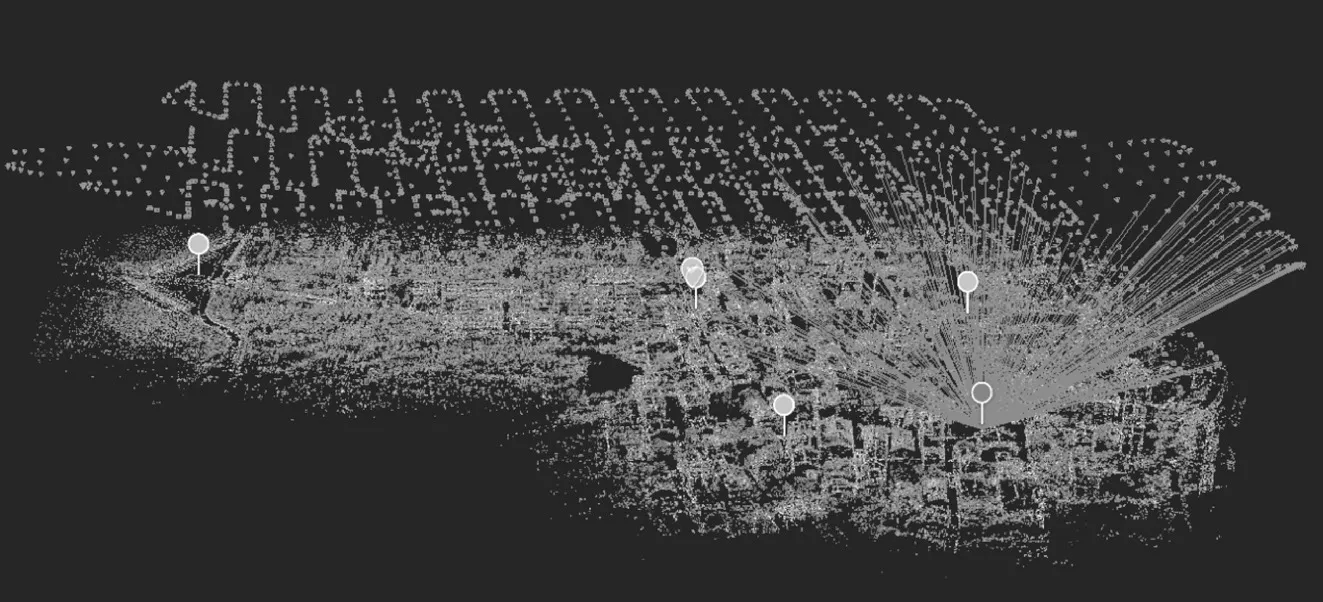
圖5 同名像點、攝影航點與像控點位置關系圖
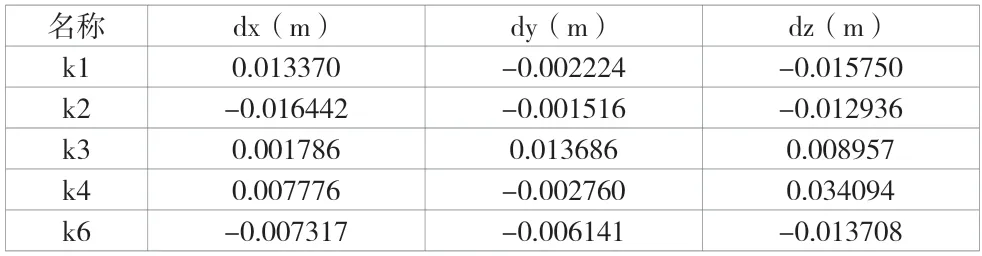
表1 地面控制點精度結果

表2 控制點均方根誤差表
圖6 為模型全貌,圖7 和圖8 為模型局部,通過觀察模型,模型的重建效果非常好,清晰、真實地反應狹窄巷道內臺階、陽臺下的房角墻面、大樹村蔭下的房屋墻壁和瀝青路面等地形地物,可以利用重建的模型直接開始刺點繪制線畫地形圖。

圖6 三維模型全貌

圖7 三維模型局部

圖8 三維模型局部
2.6 利用模型繪制地形圖
要繪制的是1 ∶500 地形圖。如圖9 所示,在繪圖軟件中打開三維模型,左圖是三維模型,右圖是線畫圖。畫房屋時可以直接刺房角點畫圖,對四面型房子也可以采用5 點法畫圖,具體方法是先在房屋的一面墻上點選2 個點,軟件會自動將墻面生成一個面,然后依次在下一個墻面上點選一個點,每個墻面都會生成面,采取面面相交的方式將房角點相交出來,到最后一個墻面生成時閉合圖型,注記房屋結構層數,一棟房子就畫好了。

圖9 利用三維模型繪制1 ∶500 地形圖(左圖為三維模型,右圖為1 ∶500 平面地形圖)
地形地物的畫法也一樣,直接在模型上依次捕捉特征點,根椐《國家基本比例尺地圖圖式第一部分1 ∶500 1 ∶1000 1 ∶2000 地形圖圖式》(GBT 20257.1-2017)要求分別將居民地、交通設施、管線、地貌、植被等地形地物逐一繪制出來。高程可以在模型地面上直接逐個點擊生成,也可利用軟件根據一定的間距統一生成數據文件導出,再進行展高程點的操作。線畫地形圖全部繪制完成如圖10 所示。

圖10 1 ∶500 地形圖
3 精度分析
3.1 檢查點測量
最終線畫地形圖成果需要通過現場測點與模型刺點采集的坐標進行精度的檢核和分析。以測像控點的方式利用RTK 布設圖根控制點,利用全站儀設站的方式免棱鏡隨機測量房角點坐標共計50 個。利用RTK 測量硬化地面點高程50 個。
實測點與模型精度對比:以全站儀現場實測檢查點為基準,在三維模型上刺點量測相對全站儀實測點的平面位置中誤差、高程中誤差分別按下面公式(1)計算。
式中:m1為檢查點中誤差,m;Δ 為檢查點全站儀現場實測值與模型刺點坐標值的誤差,m;n為參與評定精度的檢查點數。
3.2 平面坐標精度分析
利用全站儀實地采點共計50 個,經過以上中誤差計算公式統計精度情況:全站儀實測坐標與三維模型剌點坐標點位中誤差為0.043m,最大點位誤差為0.075m。
3.3 高程精度分析
利用RTK 實測地面硬化路面高程點50個,經過以上中誤差計算公式統計精度情況:RTK 實測地面高程與三維模型剌點高程中誤差為0.061m,最大高程誤差為0.119m。
4 結論
本次航空傾斜攝影測量項目的實踐,通過無人機掛載高相素單鏡頭相機從1 個垂直和4 個傾斜角度對密集建成區目標進行傾斜航空攝影測量,能最大限度地減少因樹木、房屋等遮蔽對傾斜攝影測量三維建模的影響,三維模型清晰度高,缺陷是飛行航線較掛載五鏡頭相機的航測方式要更長,要配備更多的續航電池。根據精度分析得出,利用該方法繪制的1 ∶500 地形圖,精度符合規劃要求,能滿足不動產登記房產測繪的精度要求。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03