鐵路接觸網作業車運行優化研究
2022-03-12 04:12:42鐘永紅
中國新技術新產品 2022年23期
鐘永紅
(中國鐵路武漢局集團有限公司宜昌綜合維修段,湖北 宜昌 443100)
隨著高鐵技術的快速發展和鐵路里程的不斷增加,我國成了名副其實的軌道交通強國。在整個鐵路運行系統中,接觸網作業車具有十分重要的地位[1]。一方面,接觸網作業車可以配合運載車輛的電能獲取;另一方面,接觸網作業車肩負著整個軌道系統的架線、立桿等維修任務[2]。尤其是接觸網作業車承擔了大量的軌道系統夜間巡視和維修任務,可以在很大程度上節省人力[3]。在這種情況下,接觸網作業車如何安全可靠地運行成為軌道交通系統穩定運營的重要問題。這就需要對接觸網作業車的工作狀態進行準確分析,尤其是進行運行過程中的力學分析,進而根據高性能的控制算法對接觸網作業車的運行軌跡進行優化和合理控制,全面提升接觸網作業車的運行效率和自主駕駛性能。該文在單質點模型下從牽引力、制動力、運行阻力等方面對接觸網作業車的運行過程進行受力分析,進而根據遺傳算法優化接觸網作業車的運行路線,以期獲得更好的安全性、舒適性和運行效果。
1 鐵路接觸網作業車運行過程中的受力分析
根據不同的作業需求,鐵路接觸網作業車有不同的類型,大致可以分為7 種:第一種,架線車,負責軌道系統的架線操作;第二種,檢修車,負責對整個軌道系統進行檢修;第三種,起重車,負責軌道系統內的重物裝卸和搬運;第四種,立桿車,負責在軌道系統內假設標桿;第五種,沖洗車,負責對軌道系統和關鍵部件進行沖洗作業;第六種,放線車,負責在軌道系統內進行放線作業;第七種,鉆專用板車,負責在軌道系統內的鉆孔作業。
該文以JW-4G 型號的檢修車為例,對其進行運行優化方面的研究。JW-4G 型檢修車包括液壓單元、升降單元、動力單元、制動單元、起重單元、行駛單元、檢測單元和電氣單元。該文的研究涉及行駛單元、動力單元、制動單元,主要是針對行駛單元。
在對接觸網作業車進行受力分析的過程中,一般要將接觸網作業車進行簡化處理,常見的做法是用單質點模型或多質點模型加以代替。多質點模型更復雜,并且需要考慮各質點之間的力學關系,不易求解。因此該文用單質點模型代替JW-4G 型檢修車本體進行受力分析。
接觸網作業車在運行過程中會受到多種外力的影響。除了重力、支持力等垂直方向的力以外,還要受到牽引力、接觸面的摩擦力等水平方向上的力。據此,該文給出JW-4G 型檢修車單質點模型下的受力分析,如圖1 所示。
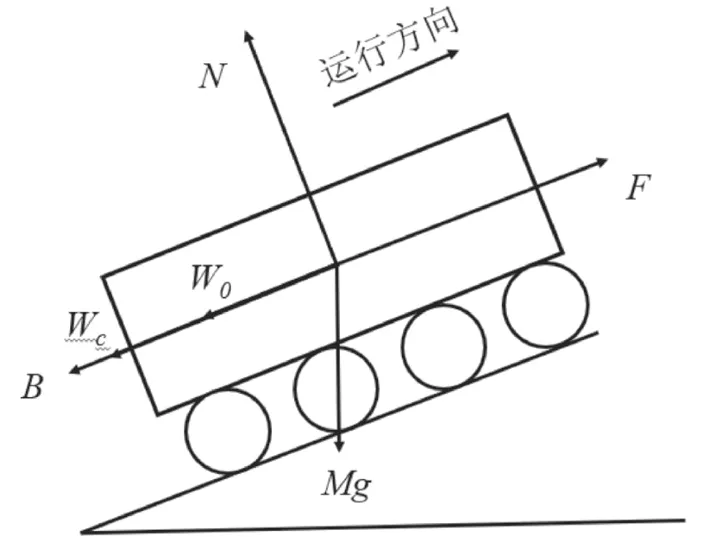
圖1 JW-4G 型檢修車單質點模型下的受力分析
如圖1 所示,JW-4G 型檢修車所受到的合力的計算如公式(1)所示。
式中:C為檢修車運行過程中所受到的合力;F為檢修車運行過程中所受到的牽引力;B為檢修車運行過程中所受到的制動力;WC為檢修車運行過程中所受到的附加阻力;W0為檢修車運行過程中所受到的基本阻力。
根據經驗,JW-4G 型檢修車所受到的最大制動力的計算如公式(2)所示。
式中:Bmax為檢修車運行過程中的最大制動力;B為檢修車運行過程中的當前制動力;v為檢修車的運行速度;φ為檢修車的制動角度。
從公式(3)中可以看出,如果在低速狀態下運行,檢修車以恒定的制動力加以控制。如果超過了73 m/s 這個速度臨界值,檢修車的最大制動力就需要根據二元一次方程進行計算。
2 鐵路接觸網作業車運行遺傳算法優化
JW-4G 型檢修車在作業過程中,由于人的參與和作業任務的需求,需要同時保證檢修車運行的平穩性、舒適性,還需要確保檢修車能夠及時達到工作點位和準確停車。因此,對JW-4G型檢修車運行控制的關鍵在于對車體速度的控制。為了達到良好的控制效果,改文采用遺傳算法對JW-4G型檢修車車體速度進行控制。
遺傳算法是根據基因遺傳規則設計出的一種優化方法,它從初始種群開始,在滿足各種規則約束的前提下運用遺傳過程中的操作,不斷更新適應度函數直到適應度函數滿足迭代終止的條件。對應于該文的問題,運行的平穩性、舒適性、工作點位的及時到達和準確停車就是該文遺傳算法執行的約束條件。遺傳算法采用的主要操作包括選擇、交叉和變異,下面將分別加以闡述。
2.1 遺傳算法的選擇計算規則
根據基因遺傳的一般規律,父一代向子一代遺傳,總是盡可能選擇更好的基因,而父一代的劣質基因會盡可能地被擯棄。對遺傳算法而言,基因的好與壞是通過適應度函數的函數值高低來判斷的。從數學角度看,高適應度的函數值是以概率的形式反應給選擇操作的,具體處理如公式(4)所示。
式中:Fit(k)為遺傳算法設定的適應度函數對應于第k 種概率的值;p(k)為遺傳算法根據適應度函數可能選擇第k種變化的概率。
按照這個公式,更高概率的變化將作為遺傳給子一代的選擇結果。
2.2 遺傳算法的交叉計算規則
遺傳算法通過多個父代基因的重組可以增加子一代基因的豐富性。交叉計算就是2 個父一代基因的交叉,進而可以得到子一代中含有2 個或2 個以上父一代基因的染色體的過程,交叉計算的說明性實例如圖2 所示。
從圖2 中給出的遺傳算法的交叉計算說明性實例,可以看出2 個父代染色體之間的交叉計算滿足如下的規則。

圖2 圖遺傳算法交叉計算的說明性實例
規則一:2 個父一代基因組向子一代傳遞,但這2 個基因組中相同的基因只保留一個,不重復向子一代傳遞。
規則二:2 個父一代基因組中,如果存在特別優良的基因,即適應度函數值特別高的基因,無條件向子一代傳遞。
規則三:按照上述2 個規則執行以后,子一代染色體中會留下一些空缺的位置,由父一代染色體中的基因按位置對應關系填充,完成子一代染色體的生成。
2.3 遺傳算法的變異計算規則
如果完全按照適應度函數值的高低、參與交叉計算的父一代染色體向子一代遺傳,那么子一代不會出現明顯的進化。根據實際遺傳的規律,子一代染色體會因變異而獲得父一代沒有的基因。為此,遺傳算法也對應設計了變異計算的規則,變異計算的說明性實例如圖3 所示。
從圖3 給出的遺傳算法變異計算的說明性實例可以看出,父一代染色體的個別位置上的基因出現了突變的情況,形成了變異遺傳的效果。

圖3 遺傳算法變異計算的說明性實例
3 鐵路接觸網作業車運行優化試驗與分析
為了驗證遺傳算法對JW-4G 型檢修車運行優化的效果,接下來進行試驗研究。試驗過程中,選擇的JW-4G 型檢修車整體質量達到了47 t,運行過程中遇到的阻力是2.4 kN。整個車體系統的傳動效率大于93%,因阻力損耗的占比不足7%。負責檢修車牽引的發動機的額定功率為360 kW。承載檢修車的車輪半徑為0.5 m,控制檢修車動作的軸數為4 個,軸間距為2.4 m。檢修車運行過程中,最高時速不得超過120 km/h,最小制動距離不得超過400 m,否則會帶來安全隱患。在這個最小制動距離的約束下,制動速度不低于80 km/h。
對遺傳算法的設定:第一個約束條件設定了檢修車運行總里程為20 000 m,第二個約束條件設定了檢修車運行總時長為1 240 s,遺傳算法的初始種群基因個數為400,遺傳代數即最大迭代次數為100 次,遺傳算法選擇計算的概率判別值為0.5,遺傳算法交叉計算的概率判別值為0.5,遺傳算法變異計算的概率判別值為0.1。
根據上述設定,采用遺傳算法對JW-4G 型檢修車進行運行速度優化控制,得到的速度變化曲線如圖4 所示。
從圖4 可以看出,在遺傳算法的控制之下,JW-4G 型檢修車的運行速度曲線光滑,代表著行車過程平穩、車載人員的舒適度很高。同時,JW-4G 型檢修車的運行速度始終控制在區段限速的速度值之下,也低于接觸網作業車標準限速(GYK)速度值的規定,安全性穩定可靠。

圖4 遺傳算法對JW-4G 型檢修車進行運行速度優化的控制曲線
進一步選擇其他4 組JW-4G 型檢修車在常規控制下動作,作為該文算法控制動作的參照,對比結果見表1。
從表1 給出的對比結果可以看出,采用遺傳算法進行運行優化控制后,JW-4G 型檢修車在準時度、精準度、舒適度、節能度4 個方面均有明顯提升,取得了更好的運行控制效果,證明了該文提出方法的有效性。

表1 5 組JW-4G 型檢修車運行控制性能的對比
4 結論
隨著我國逐步成為軌道運輸大國和強國,鐵路接觸網作業車的重要程度也日益凸現。為了進一步提升接觸網作業車的運行效果,該文在遺傳算法的基礎上提出了一種運行優化控制算法。首先確定了JW-4G 型檢修車作為接觸網作業車的具體案例,成為常見的7 類接觸網作業車的代表。其次,對JW-4G 型檢修車運行過程中的狀態進行了受力分析。再次,以速度優化為運行優化控制的核心目標,構建了遺傳算法的優化控制策略,給出了遺傳算法的約束條件、交叉計算規則、選擇計算規則、變異計算規則。試驗結果表明:在遺傳算法的控制下,JW-4G 型檢修車運行過程平穩、安全度高,與常規控制下的運行狀態相比,在準時度、精準度、舒適度、節能度4 個方面均有明顯提升。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
故事大王(2016年7期)2016-09-22 17:30:08