海洋石油作業三自由度機械臂設計
2022-03-12 04:12:40陳卓明
中國新技術新產品 2022年23期
陳卓明
(中海油能源發展股份有限公司采油服務分公司,天津 300457)
海洋石油開采是補充國家石油能源儲備、供給社會生產和居民生活所需石油資源的重要途徑,在能源開發領域扮演著日益重要的角色。在海洋石油開采平臺上,各種類型的機械設備已滿足日常的開采作業、運輸作業需求。理論上講,為了完成復雜的作業任務,應該配置多自由度的機械臂以滿足靈活操作的需求[1]。但是,因為海洋石油開采平臺的有效空間有限,太多的自由度會導致作業空間增大,有可能因操作范圍受阻而無法達到預定的需求。為此,三自由度機械臂既滿足了靈活性需求,作業空間也不大,對海洋石油開采平臺來說非常適用[2-3]。該文以海洋石油平臺的開采任務為研發背景,設計了一款三自由度的機械臂。整個設計工作從空間坐標變換的基本理論出發,通過機器人運動學和機械臂末端作業軌跡規劃等研究,完成三自由度機械臂的本體設計、運動設計,進而對其作業運動的關鍵參數進行試驗分析,以驗證其工作性能。
1 海洋石油作業三自由度機械臂的空間坐標變換
在海洋石油作業過程中,三自由度機械臂的作業空間是一個三維空間,其部件構成和運動軌跡都需要符合三維空間的坐標表達。對三維空間中的任意一個點,可以構建一個矩陣對這個點的空間坐標關系進行刻畫,其數學形式如公式(1)所示。
式中:nx為三維坐標空間中x方向上法向量;ny為三維坐標空間中y方向上法向量;nz為三維坐標空間中z方向上法向量;ox為三維坐標空間中x方向上指向向量;oy為三維坐標空間中y方向上指向向量;oz為三維坐標空間中z方向上指向向量;ax為三維坐標空間中x方向上單位向量;ay為三維坐標空間中y方向上單位向量;az為三維坐標空間中z方向上單位向量。
在海洋石油平臺上,三自由度機械臂在三維空間上的運動體現為一個點在三維空間上的平移、旋轉或者是平移和旋轉的組合。對簡單的運動,一次平移運動或一次旋轉運動就可以實現。但是對復雜運動,就需要多次平移運動和多次旋轉運動的組合。在平移運動的過程中,公式(1)所示的矩陣的前3 列是不會發生變化的,只有第4 列發生變化。可見,公式(1)給出的矩陣第4 列的動作對應于平移運動。按照這樣的規律,公式(1)中給出的矩陣的前3 列對應旋轉運動。如果要完成旋轉操作,就需要對前3 列進行變換。
為了便于闡述復雜情況下的三維坐標變換,該文用一個具體的案例來加以分析和解讀。如果三維空間中一個點(n,o,a)要參照三維空間中另一個點(x,y,z)連續進行4 次坐標變換。其中,第一次變換是一個旋轉變換,即三維空間點(n,o,a)繞三維空間坐標系的z軸旋轉θ度;第二次變換是一個平移變換,即三維空間點(n,o,a)繞三維空間坐標系的z軸平移d個單位;第三次變換還是一個平移變換,即三維空間點(n,o,a)繞三維空間坐標系的x軸平移a個單位;第四次變換還是一個旋轉變換,即三維空間點(n,o,a)繞三維空間坐標系的x軸旋轉α度。
這樣,可以根據這4 次坐標變換得到其變換后的新位置,其中的總體變換矩陣如公式(2)所示。
式中:Rot(x,a)為第一次旋轉坐標變換;Trans(a,0,0)為第二次平移坐標變換;Trans(0,0,d)為第三次平移坐標變換;Rot(z,θ)為第四次旋轉坐標變換。
2 海洋石油作業三自由度機械臂的運動學分析
在三維空間坐標變換理論的基礎上,該文設計出三自由度機械臂,專門服務于海洋石油作業的機械裝置,其結構和關鍵參數標注如圖1 所示。
圖1 中給出了海洋石油平臺三自由度機械臂的簡易結構。其中,最末端的臂長為150 cm,中間段的臂長為200 cm,垂直方向上的最長臂的長度為300 cm。在垂直方向的最長臂下方還有一個用于穩定安裝和便于固定的底座。在底座上,對應于最長臂的軸心,設定了X-Y-Z坐標系,坐標原點位于O點。垂直方向上的最長臂和中間臂形成一個關節,關節處回轉中心用O1表示。中間臂和末端臂之間形成一個關節,關節回轉中心用O2表示。末端臂上還可以攜帶操作裝置或者執行機構,以便完成抓取、搬運等動作。
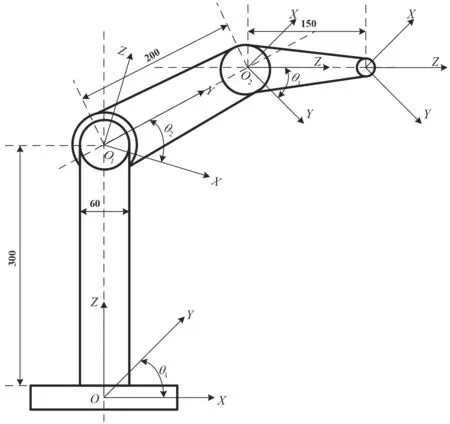
圖1 該文設計出的服務于海洋石油平臺的三自由度機械臂
根據上述的機械結構圖,要進行相關的運動學分析,就首先要建立三段機械臂的各個關節之間的D-H 關系。對有n個自由度的機械臂而言,從第一個關節到最后一個關節之間的D-H 關系可以構建如公式(3)所示的表達。
在該文中,因為是3 個自由度,一共有3 個關節,即底座和垂直方向上臂的關節,底座的高度也對應第一號連桿。第二個節是垂直臂和中間臂,垂直臂是第二號連桿,中間臂是第三號連桿。第三個關節是中間臂和末端臂,末端臂時第四號連桿。這樣,將上述構件具體化到公式(3)中可以得到關鍵的參數配置,見表1。
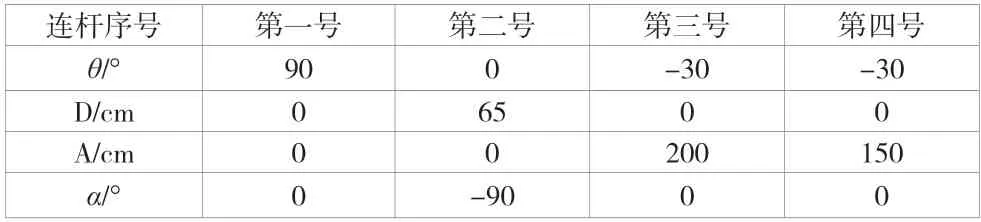
表1 該文設計的三自由度機械臂的參數及配置
表1 中,第一號連桿轉角θ為90°,第二號連桿轉角θ為0°,第三號連桿轉角θ為-30°,第四號連桿轉角θ為-30°,只有這四個連桿的動作協調配合才能完成規定的動作。從這個原理上看,表1 中其他幾個參數也需要4 個連桿的協調配合,僅依靠其中一個連桿的動作是不可以的。
3 海洋石油作業三自由度機械臂的仿真試驗
上述工作中對海洋石油作業的三自由度機械臂進行了結構設計、運動學分析、空間坐標變換規律分析,接下來將進行仿真試驗,對其空間作業的軌跡規劃進行分析,以判斷其關鍵參數的性能是否符合設計要求。在整個仿真試驗中,選擇了MATLAB 平臺作為運動控制和作業軌跡的編譯平臺。
作業軌跡的具體提出應該遵循海洋石油開采的具體任務,一方面要確保任務有效完成,另一方面要確保三自由度機械臂的作業安全和平穩運行。實際上,真正能完成作業任務的是三自由度機械臂的末端,但是末端執行機構動作的完成離不開末端臂、中間臂、垂直臂、底座的協調配合,只有這些部件都不和障礙發生碰撞,這樣的末端作業才是安全的。根據作業軌跡規劃,將末端執行機構在三維空間中動作的每個點都連接起來就可以形成末端執行機構的空間軌跡。同樣的道理,將末端臂、中間臂、垂直臂所經過的三維空間上的各個點都進行連接,就可以形成對應的空間軌跡。
在給出一個簡單的抓取任務之后,讓該文設計的三自由度機械臂在6 秒內完成這個動作,每秒鐘3 個關節的轉角變化數據見表2。
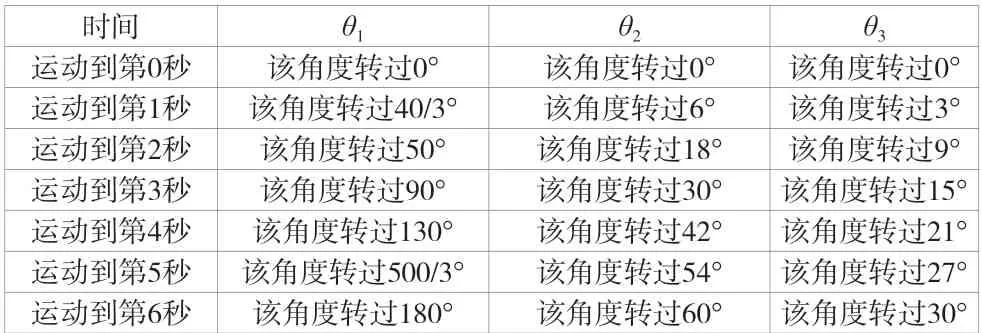
表2 簡單抓取動作下各個關節轉過的角度
為了進一步驗證該文設計的三自由度機械臂設計的是否合理、其作業過程是否達到了要求,該文進一步給出其末端的加速度變化曲線,如圖2 所示。

圖2 三自由度機械臂末端的加速度變化情況
從圖2 中的曲線可以看出,加速度從最開始的+6 °/s2調整到第1 秒時的0 °/s2,在第1 秒到第5 秒之間,三自由度機械臂的末端都維持勻速作業,作業平穩。作業完成后,三自由度機械臂的末端在第6 秒完成了轉向,加速度也調整到了-6 °/s2。
進一步觀察三自由度機械臂的末端速度變化曲線,如圖3 所示。
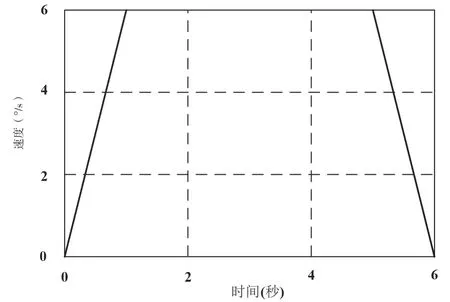
圖3 三自由度機械臂末端的速度變化情況
從圖3 中的曲線可以看出,三自由度機械臂的末端速度從第0 秒開始增大,在第1 秒時迅速拉升到+6°/s,但這個變化過程是線性的、平穩的。在第1 秒到第5 秒之間,三自由度機械臂的末端速度一直維持在+6°/s,保持勻速運動、狀態平穩。從第5 秒到第6 秒,三自由度機械臂的末端速度從+6°/s迅速調整到0°/s,線性減速、狀態依舊平穩。
進一步觀察三自由度機械臂的末端位移變化曲線,如圖4 所示。
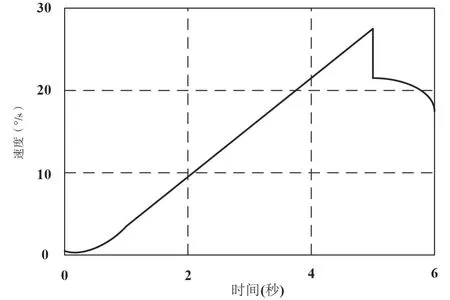
圖4 三自由度機械臂末端的位移變化情況
從圖4 中的曲線可以看出,在第0 秒后的一小段時間里,三自由度機械臂的末端位移有一個波動變化,這與其開始啟動有關。然后進入線性變化階段,一直持續到第5 秒。其后因為速度的逐漸消失,位移也開始回復調整。
目前,該文設計的三自由度機械臂末端已經在海洋石油平臺進行了初步應用,該機械臂對設備零件和貨物的抓取、搬運均顯示出良好的性能,不僅能滿足抓取精度和運輸效率的需求,而且作業過程中的平穩性也較高。
4 結論
海洋石油平臺在完成開采任務的過程中需要特定的機械完成抓取、搬運、運輸等作業。考慮平臺節省空間的原則,該文設計了三自由度機械臂。首先,從平移變換、旋轉變換分析了三自由度機械臂的空間坐標變換關系。其次,給出了三自由度機械臂的結構設計和關鍵參數,進而進行了運動學分析并給出了D-H 關系表。最后,在MATLAB 環境下進行了三自由度機械臂的作業軌跡規劃仿真試驗。試驗中3 個關節的旋轉角度被準確計算,三自由度機械臂末端的加速度變化曲線、速度變化曲線、位移變化曲線均有效完成了預期動作并且狀態平穩,充分證明了該文設計的有效性和合理性。
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
當代工人(2020年8期)2020-05-25 09:07:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
兒童故事畫報(2013年3期)2013-06-24 05:40:30