基于地基激光雷達的單木森林參數提取分析
2022-03-11 21:37:19傅根深陳健黃慶豐唐雪海
安徽農業科學 2022年4期
關鍵詞:模型
傅根深 陳健 黃慶豐 唐雪海




摘要 [目的]利用激光雷達手段大范圍估算森林參數。[方法]以安徽省黃山市休寧縣嶺南林場森林資源為研究對象,通過地面調查獲取3種森林類型單木胸徑和樹高數據,并同步使用地基激光雷達獲取點云數據,利用Hough變換檢測算法提取每木胸徑和樹高,在Matlab2020a軟件下構建基于地面調查數據和激光雷達提取值的估算模型。[結果]針葉林、闊葉林和毛竹林的胸徑估測精度(R2c)分別為0.921、0.921和0.996,RMSEc分別為2.080、2.460和0.291,模型表現顯著;樹高估測精度分別為0.908、0.846和0.500,RMSEc分別為1.120、1.620和1.210。[結論]該研究可為運用激光雷達手段大范圍估算森林參數提供依據,也可為森林類型點云識別與分割提供參考。
關鍵詞 嶺南林場;地基激光雷達;森林參數;回歸分析;精度評價
中圖分類號 S 758文獻標識碼 A文章編號 0517-6611(2022)04-0128-04
doi:10.3969/j.issn.0517-6611.2022.04.033
開放科學(資源服務)標識碼(OSID):
Extraction and Analysis of Forest Parameters for Individual Tree Based on Terrestrial Laser Scanning
FU Gen-shen1, CHEN Jian2, HUANG Qing-feng1 et al
(1. School of Forestry and Landscape Architecture, Anhui Agricultural University, Hefei, Anhui 230061; 2. KQ GEO Technologies Co., Ltd, Beijing 100176)
Abstract [Objective]To estimate forest parameters in a wide range by lidar. [Method]The study studied by forest resources in Lingnan forestry site, Xiuning County, Anhui Province, single wood diameter at breast height and tree height data of three forest types were obtained by ground survey, and their point cloud data were obtained simultaneously by terrestrial laser scanning (TLS). Each wood diameter at breast height and tree height were extracted by Hough transform detection algorithm, and an estimation model based on ground survey data and TLS extracted values was constructed under Matlab2020a software. [Result]The results showed that the estimation accuracy (R2c) of breast diameter was 0.921, 0.921 and 0.996 for coniferous, broadleaf and moso bamboo forests, respectively, with RMSEc of 2.080, 2.460 and 0.291, and the model performance was significant; the estimation accuracy of tree height was 0.908, 0.846 and 0.500, respectively, with RMSEc of 1.120, 1.620 and 1.210, respectively. [Conclusion]This study can provide a basis for estimating forest parameters in a large scale by TLS, and also provide a reference for forest type point cloud identification and segmentation.
Key words Lingnan forest farm;Terrestrial laser scanning;Forest parameters;Regression analysis;Precision evaluation
基金項目 安徽省自然科學基金項目(1808085QC74)。
作者簡介 傅根深(1997—),男,安徽合肥人,碩士研究生,研究方向:森林經理。*通信作者,講師,博士,從事森林資源經營管理和林業3S技術研究。
收稿日期 2021-06-15
樹木胸徑和樹高是森林調查中常用的參數,傳統方法是通過胸徑卷尺和測高器進行測量獲取,但是這種方法存在著工作量大、人為誤差等不足。除此之外,對于地形復雜、坡度大、調查人員難以進入的區域,這些林木因子獲取難度較大。遙感技術一定程度上能夠彌補這些不足,光學遙感技術在二維平面能夠獲得較好的水平森林參數,但是在獲取樹高、胸徑、密度等三維參數時顯得不足。作為一種新興的主動遙感技術,激光雷達發射的激光脈沖則可輕易地從樹木頂端到達地表,甚至穿透地表到達土壤內部,這種獲取森林垂直結構參數的技術目前大部分光學遙感傳感器難以做到[1]。地基激光雷達(terrestrial laser scanning,TLS)是一種基于激光的新型遙感儀器,通過光束偏轉機制獲取地表物體的三維點云數據,可以同時量測較高精度的地物范圍和地物之間的角度,TLS獲取的點云數據具有高密度、高精度等特點,可輕易捕捉林分尤其是下層林分的結構信息,這對于精確掌握森林生態系統的變化并研究這些變化對整個陸地生態系統的影響起著舉足輕重的作用[2]。但是,由于大部分森林冠層之間相互遮擋的影響,機載激光雷達(airborne LiDAR scanning,ALS)則難以準確分離喬木層下的灌木和草本,ALS的優勢體現在大區域森林垂直結構的快速獲取,TLS則要耗費龐大的人力物力才能做到[3]。
TLS技術在林業中的應用可以追溯到2002年,其以快速、無損、自動的方式獲取胸徑、樹高、樹冠寬度、郁閉度等森林參數[4-7]。研究表明,從TLS點云中提取胸徑的方法很多,如二維曲線擬合、圓檢測、圓柱擬合等,并都得到了較高的擬合精度[8-9]。Ma等[10]使用協方差特征分類得到葉片點云并實現了LAI的反演。趙方博等[11]通過對數據預處理提取出樹冠點云,將其模擬為半球圖像后運用球極平面投影和Lambert方位角等面積投影,通過統計面積的方法分別計算不同投影方法和圖像劃分方法下的孔隙率,進而計算出真實葉面積指數。駱鈺波等[12]以主干點云為基礎,采用迭代最小二乘擬合圓柱的方法自動提取樹木位置、胸徑;構建點云的八叉樹結構,利用體素的空間鄰接性實現點云分割,自動提取樹高,估測R2超過0.9。馬振宇等[13]基于自適應臨近搜索法和遞歸特征排除法(RFE)篩選重要變量進行隨機森林分類,有效提取倒木數據。張天安等[14]通過對原始點云進行枝葉分離并根據Dijkstra距離法和加權匹配法獲取活立木單株點云,分別構建了含笑和櫻花的枝干三維模型。楊水榮等[15]采用切片形式的Alpha Shape 3D法估算樹木冠層體積,并定量反映樹木冠層分布及體積變化情況。
筆者以安徽省黃山市休寧縣嶺南林場為研究區域,通過樣地設置及樣木調查,獲取針葉林、闊葉林、毛竹林3種森林類型的單木胸徑及樹高數據。綜合利用GPS、全站儀、TLS獲取樣木的激光點云數據,通過坐標匹配實現單木與激光數據的吻合,在此基礎上提取樣木的胸徑和樹高,并進一步構建3種森林類型單木的胸徑和樹高估測模型,利用留一法驗證模型的精度。通過對森林參數的精確估測,可為下一步應用機載激光雷達實現大區域森林參數估算提供科學依據,對開展森林蓄積量估算、森林生物量定量遙感模型構建、碳達峰和碳中和等生態監測具有重要意義。
1 研究區概況
研究數據均采集于安徽省黃山市休寧縣嶺南林場,林場位于安徽省最南端,與江西省交界(圖1)。嶺南林場地處中緯度地帶,屬于北亞熱帶濕潤季風氣候,年均氣溫16.2 ℃,日照時數1 800 h左右,無霜期220 d。林場地形表現為丘陵—低山—中山3種類型,其中丘陵面積最大。土壤類型主要為黃壤、黃棕壤。林場森林覆蓋率較高,植被分布具有典型的過渡地帶特征,森林類型以針葉林、針闊混交林為主。常見的主要樹種包括杉木[Cumninghamia lanceolata(Lamb.)Hook.]、馬尾松(Pinus massoniana Lamb.)、楓香(Liquidambar formosana Hance)、毛竹[Phyllostachys heterocycla(Carr.)Mitford cv.Pubescens]、木荷(Schima superba Gardn.et Champ.)、栓皮櫟(Quercus variabilis Bl.)、苦櫧(Castanopsis sclerophylla)等。
2 研究方法
2.1 樣木調查
該試驗涉及3種森林類型,分別為針葉林、闊葉林和毛竹林。樣地設置為20 m×20 m的正方形。為了精細提取單木森林參數,每木檢尺以2 cm為起測胸徑,采用傳統的胸徑卷尺進行測量,使用激光測高器獲取單木樹高。利用全站儀、羅盤儀、皮尺獲取樣地4個角點位置,通過靜態GPS獲取其坐標。
2.2 激光點云數據采集
利用Trimble TX8設備進行地面樣木點云數據采集。Trimble TX8具有輕便、攜帶方便的特點,最大掃描距離達到340 m,激光點云高達555百萬點,垂直掃描角度為317°,激光波長達到1 500 nm。每個樣地在樣地的4個角點和中心位置共設置5個掃描站點。每站掃描時間為10 min。
2.3 數據坐標匹配
TLS、GPS、全站儀數據采集完畢后,利用TLS儀器自帶Trimble RealWorks系統軟件對采集到的原始TLS數據進行反射靶標識別、多站拼接、坐標轉換和生成點云等預處理操作,利用后處理軟件對GPS數據進行差分處理,對全站儀坐標數據進行點校正處理,以實現單木坐標的匹配[16]。
2.4 激光點云數據處理
由于受到目標物體的表面形狀、方向和紋理的影響,激光脈沖被反射后形狀會發生改變,尤其是掃描到目標物邊緣或發射脈沖通過植被時都將較大地改變反射脈沖形狀,從而產生較大偏差。原始的點云數據會接收到多個地物的回波信息,并產生密度非常高的點云數據,在進行森林參數(如胸徑和樹高)提取時,只需要保留樹干最外部點云即可。利用TerraSolid軟件的TerraScan模塊對初始點云數據進行預處理,主要包括數據過濾、非樹干點去除、數據抽稀[16]。
2.5 森林參數提取
利用Hough變換檢測算法來估測樣地內每個單株立木的胸徑,然后根據樹木的形態學特征,通過設置一系列閾值去除非樹干處的擬合圓,可提高單木的位置與胸徑識別精度[1]。最后,通過地基激光雷達掃描數據獲取的單木樹干生長方向與該方向上的單木垂直結構提取單木高[16]。
2.6 森林參數估測模型構建及精度驗證
在Matlab2020a環境下利用回歸分析方法分別構建基于實際測量值和TLS提取值的單木胸徑、樹高估測模型。最后采用留一法交叉驗證對構建的胸徑、樹高估測模型進行精度驗證。留一法交叉驗證是指每個森林類型中采集到n株樣本,每次選取1個樣本作為測試集,其余樣本(n-1)作為訓練集。循環迭代需要運算n次訓練,最后取n次訓練的平均值進行檢驗。利用決定系數R2、均方根誤差RMSE、P值等作為建模過程的評價指標。
3 結果與分析
3.1 樣木數據處理結果
針葉林樣地主要樹種為杉木,根據現場調查及TLS提取數據,共得到有效樣木70株。闊葉林樣地主要樹種為木荷、短柄枹、檵木、甜櫧等,優勢樹種為木荷,有效樣木119株。毛竹林有效樣木320株。
3.2 3種森林類型單木胸徑估測模型構建
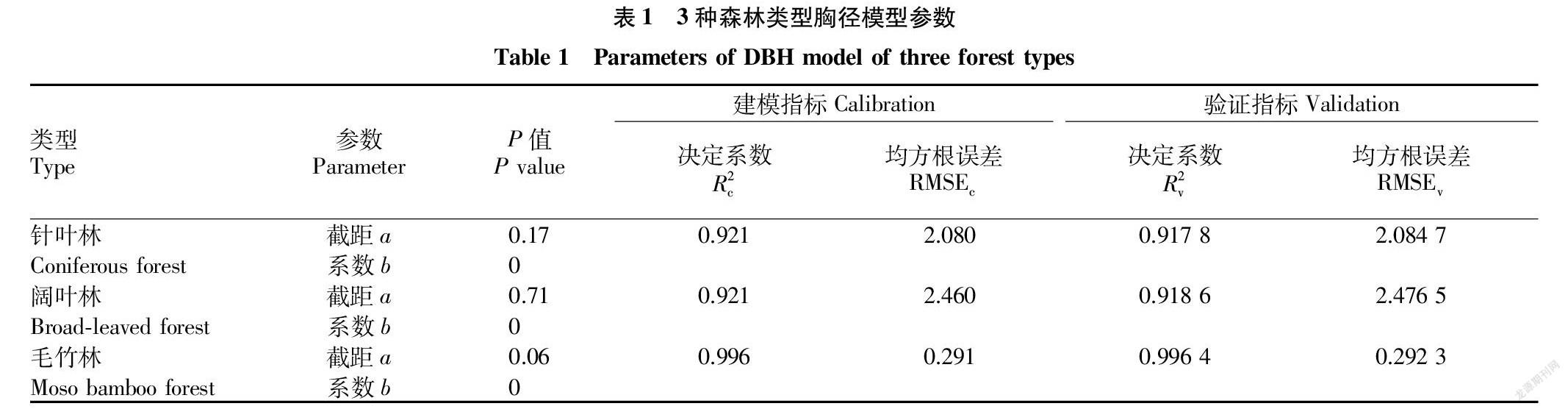
在Matlab2020a軟件環境下,利用回歸分析得到3種森林類型單木胸徑估測模型,結果見圖2。3種森林類型建模及檢驗結果見表1。
由圖2和表1可知,3種森林類型的胸徑估測精度(R2c)分別為0.921(針葉林)、0.921(闊葉林)和0.996(毛竹林),0.05水平下均達到顯著。驗證精度(R2v)分別為0.917 8(針葉林)、0.918 6(闊葉林)和0.996 4(毛竹林),以毛竹林估測精度最高。嶺南林場毛竹林均為人工林,造林密度合適,林相整齊,林下無雜灌,TLS掃描無視線盲區,點云處理和提取效果較好。針葉林和闊葉林林分中樹木胸徑大小不一,特別是闊葉林,該林分為天然次生林,該試驗單木胸徑多集中于0~20 cm區間段,這也導致在掃描時,胸徑大的樹木會對小樹產生遮擋。
3.3 3種森林類型單木樹高估算模型構建
在Matlab2020a軟件環境下,利用回歸分析得到3種森林類型單木樹高估測模型,結果見圖3。
3種森林類型建模及檢驗結果見表2。
由圖3和表2可知,3種森林類型的樹高估測精度(R2c)分別為0.908(針葉林)、0.846(闊葉林)和0.500(毛竹林),0.05水平下均達到顯著。驗證精度(R2v)分別為0.902 8(針葉林)、0.841 6(闊葉林)和0.495 9(毛竹林),針葉林估測精度最高。針葉林為杉木人工林,該類型林相整齊,樹干筆直,林下雜灌對點云處理影響較小,闊葉林估測精度次之,通過分析,該類型中的甜櫧和馬尾松由于上層分枝較多,與旁邊較為低矮樹木交叉遮擋導致樹高點云出現誤差,在10 m以下的樹木下表現尤為嚴重。毛竹林樹高估測精度最低,僅為0.500,這是由于毛竹生長速度較快,盡管胸徑普遍低于針葉林和闊葉林,但是樹高較高,越往上端,竹梢偏離垂直方向程度越大,冠層頂部遮擋較為嚴重,識別起來比較困難。
4 結論與討論
4.1 結論
該研究利用TLS對安徽省黃山市休寧縣嶺南林場3種森林類型樣地進行掃描,通過每木檢尺獲取其胸徑和樹高,通過TerraSolid軟件進行點云處理并利用Hough變換檢測算法提取樣木胸徑和樹高。在此基礎上,利用Matlab2020a軟件構建胸徑和樹高估算模型,得到結論如下:
(1)針葉林胸徑估算模型為y=0.86+1.01x,R2c=0.921,RMSEc=2.080,P<0.05,達到顯著水平;通過留一法驗證,R2v=0.917 8,RMSEv=2.084 7。闊葉林胸徑估算模型為y=0.12+0.92x,R2c=0.921,RMSEc=2.460,P< 0.05,達到顯著水平;通過留一法驗證,R2v=0.918 6,RMSEv=2.476 5。毛竹林胸徑估算模型為y=0.11+0.99x,R2c=0.996,RMSEc=0.291,P< 0.05,達到顯著水平;通過留一法驗證,R2v=0.996 4,RMSEv=0.292 3。
(2)針葉林樹高估算模型為y=0.56+0.95x,R2c=0.908,RMSEc=1.120,P<0.05,達到顯著水平;通過留一法驗證,R2v=0.902 8,RMSEv=1.138 0。闊葉林樹高估算模型為y=-0.95+1.03x,R2c=0.846,RMSEc=1.620,P< 0.05,達到顯著水平;通過留一法驗證,R2v=0.841 6,RMSEv=1.629 9。毛竹林樹高估算模型為y=7.64+0.49x,R2c=0.500,RMSEc=1.210,P< 0.05,達到顯著水平;通過留一法驗證,R2v=0.495 9,RMSEv=1.211 9。
4.2 討論
該研究選擇的樣木是在相同的地利條件下,盡管模型精度很高且達到顯著水平,能否推廣到所有森林類型還需要更多的樣本支持。特別是對更小胸徑的單木識別,對現有算法進行優化甚至引入更多圖像分割技術是今后研究的重點。樹木冠層的復雜性也為點云數據計算機自動識別和歸類帶來一定的困難。
盡管TLS能夠獲取令人滿意的估測結果,但是對于山區的森林調查進行大范圍推廣顯然不太現實。近年來,ALS在林業中也得到了推廣應用,TLS和ALS在點云密度、掃描角度、掃描速度等方面都存在差異,數據的處理流程也不盡相同。隨著雷達技術的發展和行業需求的拓展,TLS和ALS結合解決行業實際問題則是一個有效的手段[17-18]。
參考文獻
[1] 劉魯霞.機載和地基激光雷達森林垂直結構參數提取研究[D].北京:中國林業科學研究院,2014.
[2] 郭慶華,劉瑾,陶勝利,等.激光雷達在森林生態系統監測模擬中的應用現狀與展望[J].科學通報,2014,59(6):459-478.
[3] 孫忠秋,吳發云,高顯連,等.基于機載大光斑激光雷達的森林冠層高度估測[J].林業資源管理,2020(3):111-117.
[4] 晏穎杰,范少輝,官鳳英.地基激光雷達技術在森林調查中的應用研究進展[J].世界林業研究,2018,31(4):42-47.
[5] KANKARE V,HOLOPAINEN M,VASTARANTA M,et al.Individual tree biomass estimation using terrestrial laser scanning[J].ISPRS journal of photogrammetry and remote sensing,2013,75(1):64-75.
[6] DASSOT M,CONSTANT T,FOURNIER M.The use of terrestrial LiDAR technology in forest science:Application fields,benefits and challenges[J].Annals of forest science,2011,68(5):959-974.
[7] LIU L X,PANG Y,LI Z Y,et al.Combining airborne and terrestrial laser scanning technologies to measure forest understorey volume[J].Forests,2017,8(4):1-14.
[8] 劉魯霞,龐勇,李增元.基于地基激光雷達的亞熱帶森林單木胸徑與樹高提取[J].林業科學,2016,52(2):26-37.
[9] LIANG X L,LITKEY P,HYYPPA J,et al.Automatic stem mapping using single-scan terrestrial laser scanning[J].IEEE transactions on geoscience and remote sensing,2012,50(2):661-670.
[10] MA L X,ZHENG G,EITEL J U H,et al.Improved Salient feature-based approach for automatically separating photosynthetic and nonphotosynthetic components within terrestrial Lidar point cloud data of forest canopies[J].IEEE transactions on geoscience and remote sensing,2016,54(2):679-696.
[11] 趙方博,王佳,高赫,等.地面激光雷達的單木真實葉面積指數提取[J].測繪科學,2019,44(4):81-86,109.
[12] 駱鈺波,黃洪宇,唐麗玉,等.基于地面激光雷達點云數據的森林樹高、胸徑自動提取與三維重建[J].遙感技術與應用,2019,34(2):243-252.
[13] 馬振宇,龐勇,李增元,等.地基激光雷達森林近地面點云精細分類與倒木提取[J].遙感學報,2019,23(4):743-755.
[14] 張天安,云挺,薛聯鳳,等.基于地面激光雷達的活立木枝干三維建模[J].南京林業大學學報(自然科學版),2015,39(4):163-167.
[15] 楊水榮,黃洪宇,唐麗玉,等.基于地面激光雷達點云的樹木冠層變化定量分析[J].福州大學學報(自然科學版),2021,49(1):8-14.
[16] 陳健.基于地基激光雷達的不同森林類型單木胸徑與樹高提取[D].合肥:安徽農業大學,2016.
[17] 郭王,程效軍.基于激光強度分類的機載與地面激光雷達點云配準方法[J].激光與光電子學進展,2018,55(6):409-416.
[18] 韓婷婷.激光雷達數據在森林垂直結構參數反演中的應用綜述[J].北京測繪,2020,34(8):1061-1065.
3615500338297
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
