MEMS慣性測量單元航姿更新中的測量誤差估算方法
2022-03-09 01:51:28馬江華林煒軒萬美琳王德志
電子與信息學報 2022年2期
馬江華 林煒軒 萬美琳 王德志*
①(武漢交通職業學院電子與信息工程學院 武漢 430065)
②(湖北大學物理與電子科學學院 武漢 430062)
1 引言
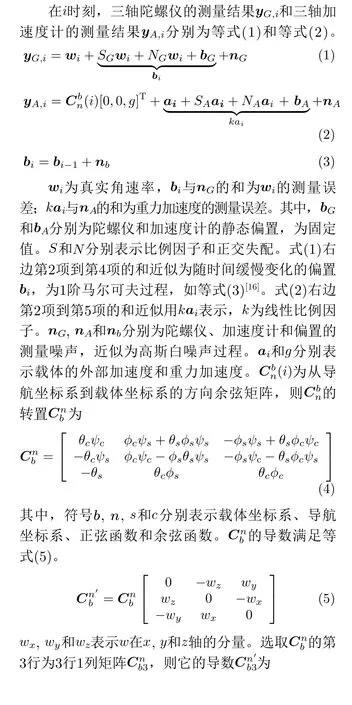
航姿包括俯仰角θ、橫滾角φ和航向角ψ,用于將線性加速度投影到導航坐標系,再通過兩次積分解算載體的位置。微電機系統慣性測量單元(Micro Electro-Mechanical System Inertial Measurement Unit, MEMS-IMU)包括三軸陀螺儀和三軸加速度計,是實現高性價比自主定位系統的關鍵器件。陀螺儀的偏置和MEMS-IMU的測量誤差導致航姿精度不高,限制了MEMS-IMU在自主定位系統的廣泛應用[1]。大量研究利用多位置校準方法估算陀螺儀的偏置[2-4],但陀螺儀的噪聲大于地球的自轉速率,導致校準需要借助精密轉臺,增加了校準的成本。另外,艾倫方差和小波矩廣義估算模型等方法可用于估算MEMS-IMU的測量誤[5,6],但該方法復雜且運算量較大,較難應用在移動終端。通常利用MEMS-IMU估算載體的姿態[7-10],然后利用三軸磁力計解算載體的航向角[11-13],但磁力計極易受磁性材料的干擾,應用時具有一定的局限。
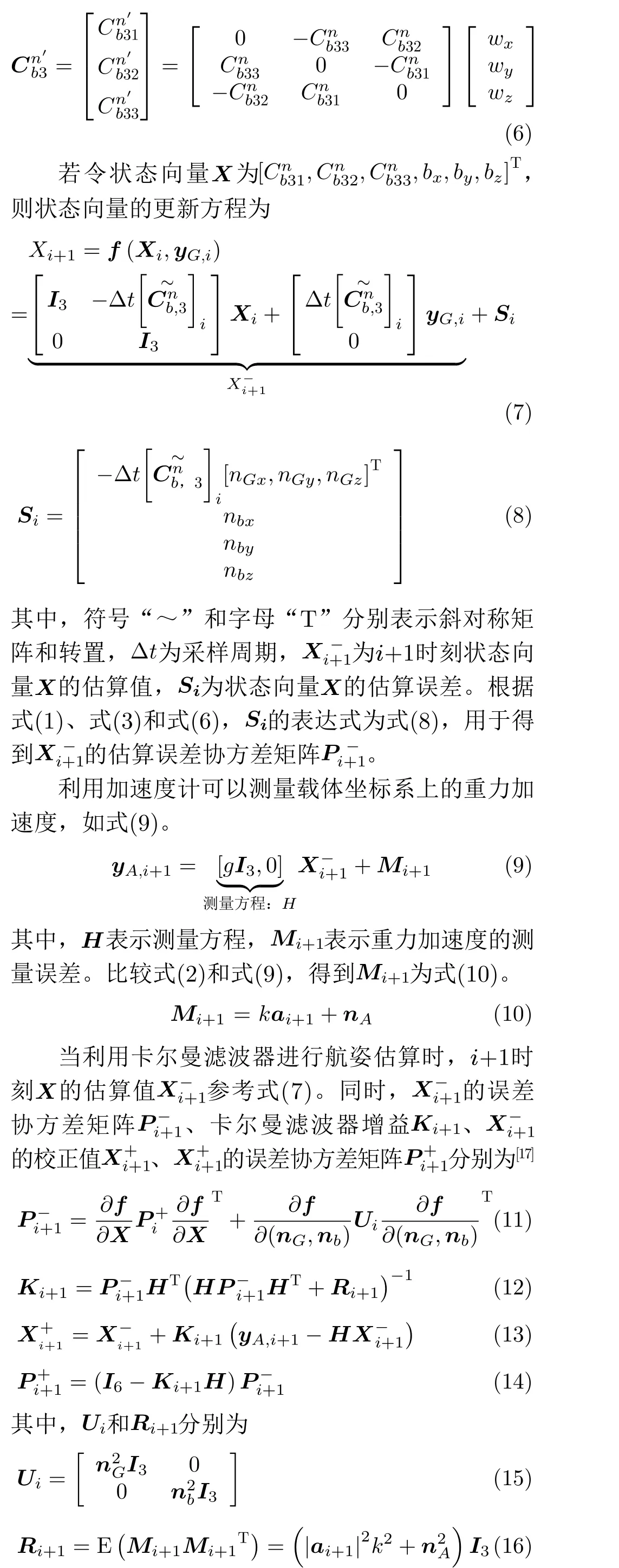
為避免使用轉臺和磁力計,可利用卡爾曼濾波器在線估算載體的姿態和陀螺儀的偏置,然后利用不包含偏置的陀螺儀的測量結果解算航向角,可獲得較高精度的航姿[14],但該方法較易受測量誤差值的影響。已有成果直接給出測量誤差的實驗結果或者經驗值,缺乏理論和實驗的指導[15]。針對該問題,本文提出一種用于優化航姿精度的測量誤差估算方法,通過推導測量誤差的數學模型并分析航姿精度隨測量誤差估算值的變化趨勢,得到最優航姿精度時的測量誤差值。
2 理論基礎

3 估算方法

4 實驗分析
該實驗采用型號為JY901的MEMS-IMU模組,由慣性芯片、處理器、穩壓器和藍牙等模塊組成,如圖1。慣性芯片為InvenSense公司生產的型號為MPU9250的9軸MEMS-IMU,包括三軸陀螺儀、三軸加速度計和三軸磁力計,其中磁力計用于產生參考航向角。MPU9250的原始數據通過藍牙協議采集到計算機,然后利用MATLAB進行后處理得到航姿值。
設置采樣頻率和重力加速度分別為100 Hz和9.8 m/s2。將JY901遠離磁性物質,先水平靜止放置1 min,再以任意航姿緩慢勻速旋轉3 min,最后水平靜止放置1 min。因為整個運動過程為勻速運動狀態,可以通過加速度計的測量結果并利用式(23)和式(24)解算的姿態作為參考姿態θref和φref。因為JY901遠離磁性物質,可利用磁力計解算的航向角作為參考航向角ψref。
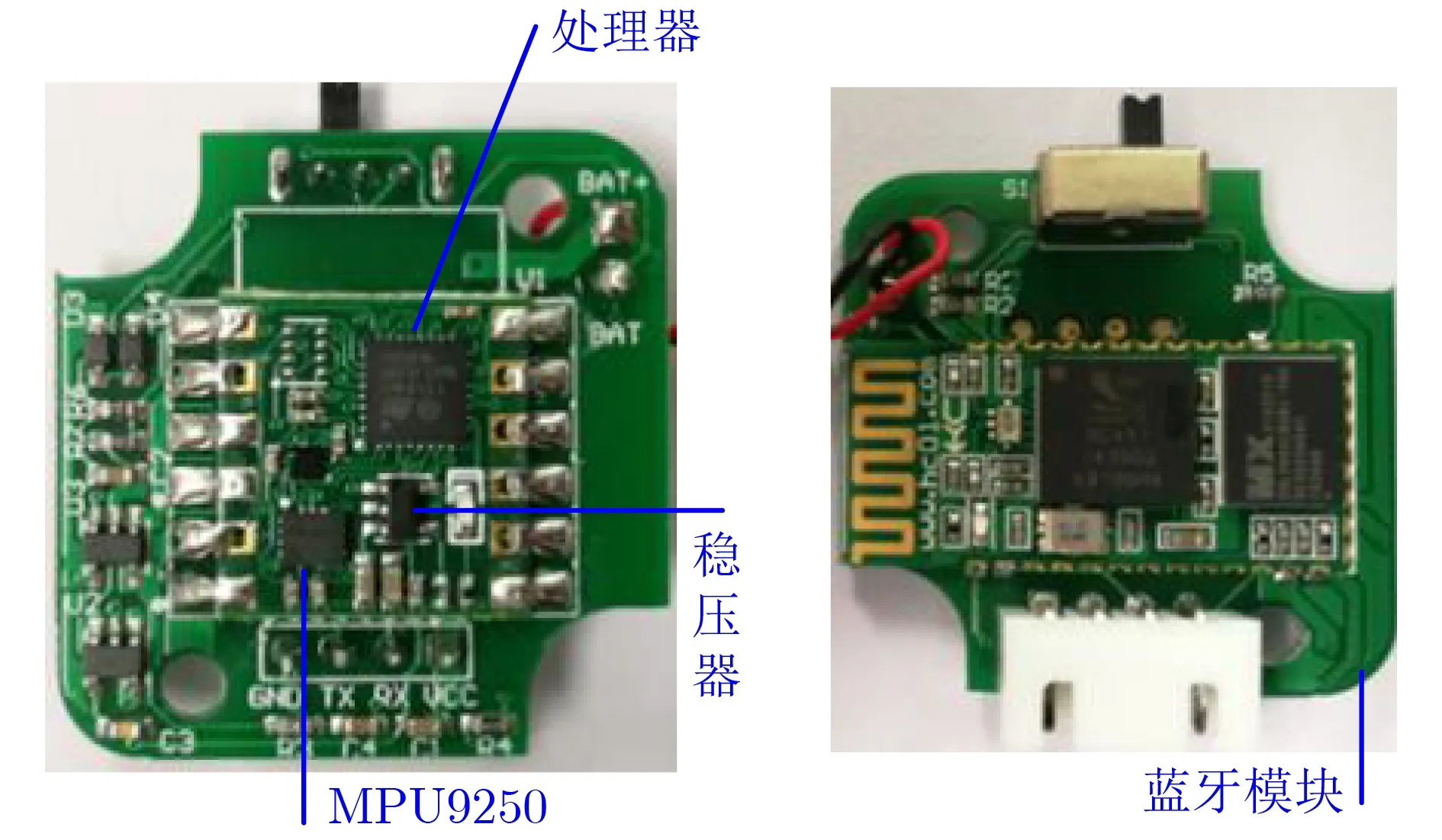
圖1 JY901慣性測量模組
該實驗分為3部分:(1) 對采集到的陀螺儀、加速度計和磁力計的測量結果進行低通濾波;(2) 獲取測量誤差中的未知參數值;(3) 將求得的測量誤差參數代入卡爾曼濾波器,解算航姿的更新值,通過與參考航姿的比較驗證提出的測量誤差估算方法的可行性。
(1) 低通濾波。利用階數為50截止頻率為1 Hz的FIR低通濾波器對陀螺儀、加速度計和磁力計的測量結果濾波。本實驗只繪制了x軸加速度計測量結果的濾波效果,y軸和z軸加速度計測量結果的濾波效果以及陀螺儀和磁力計測量結果的濾波效果類似。如圖2,濾波前加速度yAx具有較多的毛刺分量,濾波后的加速度YAx波形較光滑,通過該濾波器消除了諧波分量對測量結果的影響,利用式(1)和式(2)模擬陀螺儀和加速度計的測量結果具有合理性。
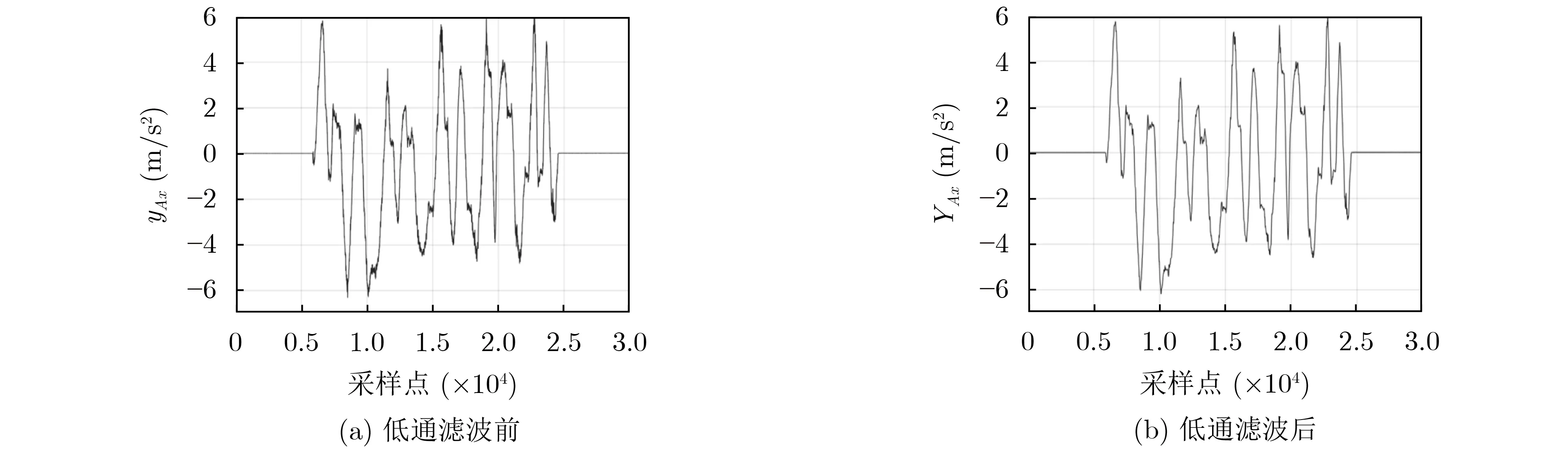
圖2 x軸加速度計測量結果濾波前后的波形

(3) 可行性分析。基于本文測量誤差估算方法解算的航姿和利用加速度計、磁力計解算的參考航姿如圖4所示,在整個5 min內俯仰角、橫滾角和航向角和參考航姿完全一致。在動態時間范圍內:第6000個采樣點到第25000個采樣點之間,俯仰角和橫滾角與參考值的最大偏差小于1°,航向角偏離參考值高達10°。在靜止時間段,例如第25000個采樣點到30000個采樣點之間(如圖4右下角),俯仰角與參考值的偏差最大為0.008°,橫滾角與參考值的偏差最大為0.006°,航向角與參考值的偏差值最大為0.6°。
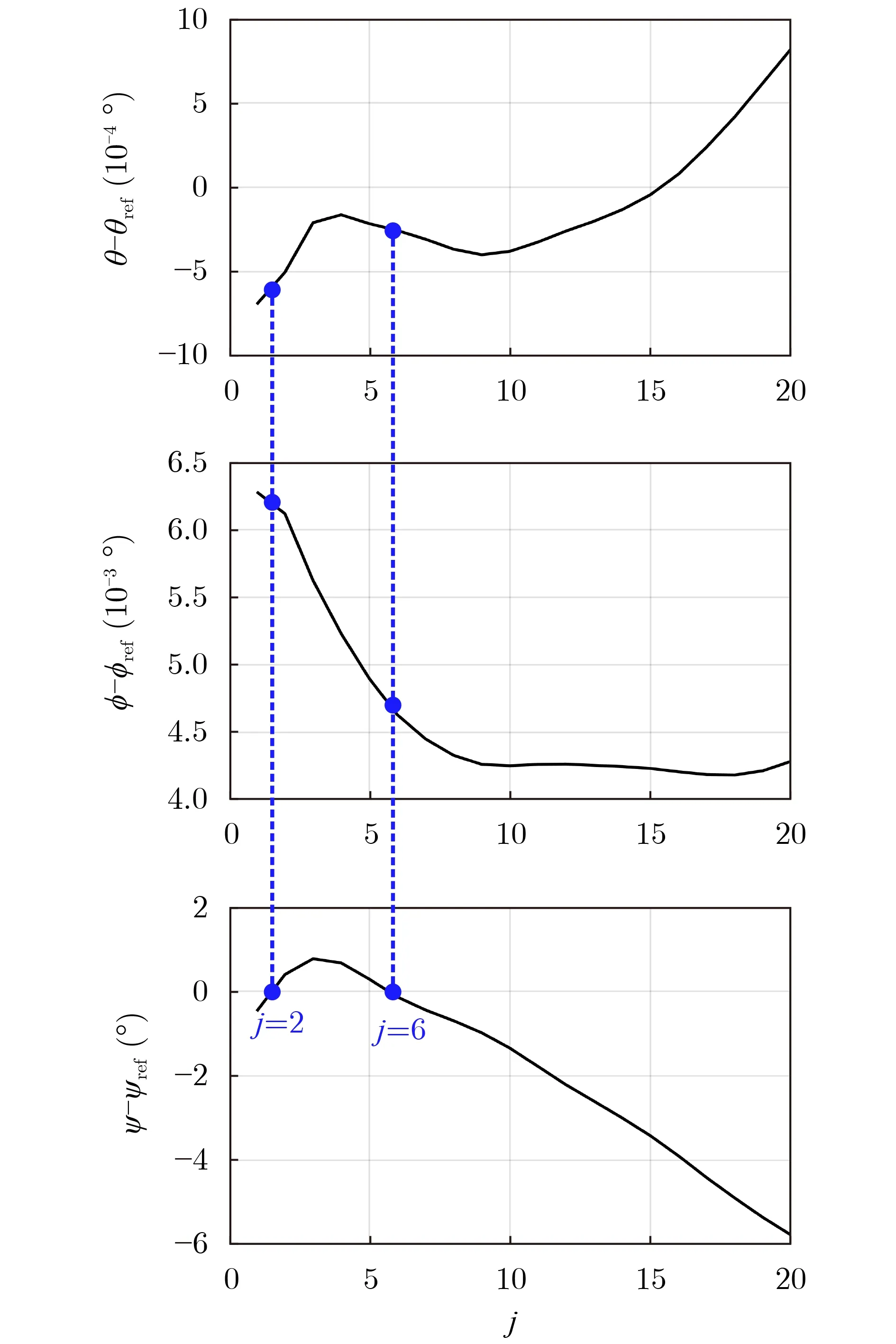
圖3 當取第28000個采樣點時航姿誤差隨j的變化趨勢
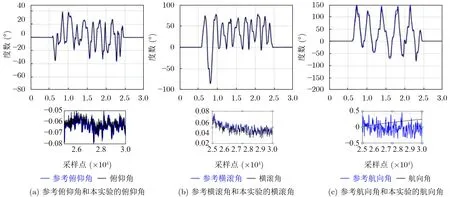
圖4 參考航姿和利用本文測量誤差估算值解算的航姿
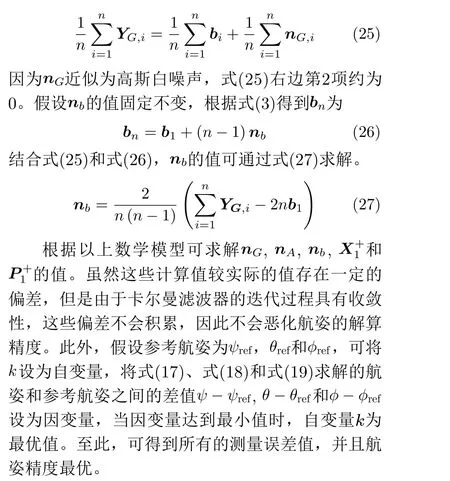
以上實驗結果的分析如下:① 基于本文測量誤差估算方法的航姿與參考航姿保持一致,功能正確。② 動態狀態時最大的姿態誤差小于1°,表明該估算方法可用于人體平衡等僅需要姿態的應用領域[19]。③ 靜止狀態時,姿態與參考值的最大偏差小于0.008°,航向角與參考值的最大偏差小于0.6°,具有較高的精度。該特性可拓展本文的估算方法在自主定位和導航等領域的應用,例如將MEMSIMU綁定在腳面,利用腳部著地靜止時刻的航向角修正動態時的航向角誤差。以上3條結論驗證了本文提出的測量誤差估算方法具有可行性,可用于指導基于MEMS-IMU的人體平衡、自主定位和導航等系統的設計。
5 結束語
本文提出了一種測量誤差估算方法,用于得到最優的航姿精度。該方法通過推導測量誤差參數的數學模型,分析航姿精度隨測量誤差參數的變化,得到最優航姿時的測量誤差參數值。首先介紹了測量誤差的理論基礎,然后介紹了確定所有測量誤差參數值的估算方法,最后通過一種MEMS-IMU,測試載體在5 min內勻速運動的航姿,驗證估算方法的可行性。圖4所示的航姿精度實驗結果表明本文的研究工作對基于MEMS-IMU的高精度航姿估算具有一定的意義。
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56