基于ROS 系統(tǒng)的智能垃圾清潔車
2022-03-09 01:50:34莫可錢超張婉怡
科學(xué)技術(shù)創(chuàng)新 2022年4期
關(guān)鍵詞:系統(tǒng)
莫可 錢超 張婉怡
(哈爾濱理工大學(xué)電氣學(xué)院,黑龍江 哈爾濱 150006)
近年我國各地紛紛推出垃圾分類政策,但由于市民的積極度不高,相關(guān)工作總是難以展開[1]。據(jù)統(tǒng)計數(shù)據(jù)分析,分類知識匱乏以及再分類存在的衛(wèi)生健康隱患,是市民垃圾分類工作的兩大障礙。為解決這一障礙,同時鼓勵“互聯(lián)網(wǎng)+”經(jīng)濟的發(fā)展,依托互聯(lián)網(wǎng)、大數(shù)據(jù)等技術(shù)研發(fā)出的智能垃圾車是十分具有實用價值的。
市面上現(xiàn)行路徑規(guī)劃技術(shù)包括模板匹配路徑規(guī)劃法、地圖構(gòu)建路徑規(guī)劃法、人工勢場路徑規(guī)劃法及人工智能路徑規(guī)劃。前三種方法過于依賴路徑模板,對于有突現(xiàn)障礙物的動態(tài)電路應(yīng)對能力差,易受不確定因素影響。本清潔車采用的是基于現(xiàn)代人工智能技術(shù)的動態(tài)窗口法。該方法不僅能有效改善前三種建圖方法中出現(xiàn)的缺點,減少對環(huán)境因素的依賴,還高效應(yīng)用于他所工作的實際情況,是目前最為實用化、系統(tǒng)化的路徑規(guī)劃技術(shù)[2-6]。
目前流行的識別技術(shù)有紅外線識別、超聲波識別、視覺識別。紅外線與超聲波識別雖然原理簡單、成本不高,但容易受材料、噪音、溫度等外界因素影響,而視覺感知技術(shù)相對來說抗干擾能力強,雖然需要較高技術(shù)支撐,但得到的信息資源也是最豐富的。本車?yán)肙pen CV 視覺識別能夠高效地鎖定目標(biāo)物,識別其品類,在復(fù)雜多變的環(huán)境下仍能穩(wěn)定運行[7-10]。
本設(shè)備不僅完全擺脫人力輔助,完成了從撿到分類再到清潔地面的一條龍服務(wù),而且路線規(guī)劃精簡,環(huán)保節(jié)能。無需費力臟手,徹底解決家庭衛(wèi)生問題。
1 硬件部分
硬件部分的主要功能是作為骨架支撐機器完成行動避障和撿拾清理的動作,主要由履帶、雷達、車架、機器臂、垃圾箱、電動機、驅(qū)動板等六大部分組成。
圖1 為清潔機器人整體仿真,由攝像頭模塊、機械手臂、履帶、吸塵器四部分構(gòu)成。攝像頭模塊采用Micro python 語言編程的攝像頭Open CV 實現(xiàn)視覺傳達與識別;機械手臂用來抓取、投放目標(biāo);履帶可方便爬坡;如遇到地毯等障礙物時,超聲波探測儀發(fā)出超聲波被反彈,系統(tǒng)開始重新規(guī)劃路線。

圖1 機器人仿真概貌圖
圖2 為機器人零件組裝圖,小車主要由雷達、車輪、履帶、車身、攝像頭、電機、機械臂、芯片等部分組成。

圖2 機器人仿真零件圖
機器的驅(qū)動板是一款適用于Jetson Nanol 樹莓派3B+/4B 的ROS 機器驅(qū)動板,具體部件如圖3 所述。它的主要功能包含∶①穩(wěn)壓功能:可以將7-12V 的直流輸入電壓降壓,可用于給主芯片或驅(qū)動馬達等外部設(shè)備供電;②馬達驅(qū)動:通過馬達驅(qū)動芯片來驅(qū)動馬達正轉(zhuǎn)、反轉(zhuǎn)、停止、加速、減速;③舵機驅(qū)動:驅(qū)動板帶有8 路舵機驅(qū)動輸出接口,在使用內(nèi)部電壓給舵機供電的情況下,可以同時驅(qū)動8 個5V 的PWM舵機。④傳感器驅(qū)動∶驅(qū)動板上未被占用的通信口被直接引到了底下的Jetson Nanol 上,并以黃色插針標(biāo)示,每組通信口均有5V 和GND 供電插針,分別以紅色和黑色標(biāo)示。⑤傳感器數(shù)據(jù)采集:可采集包括馬達轉(zhuǎn)速、陀螺儀等關(guān)鍵數(shù)據(jù)。
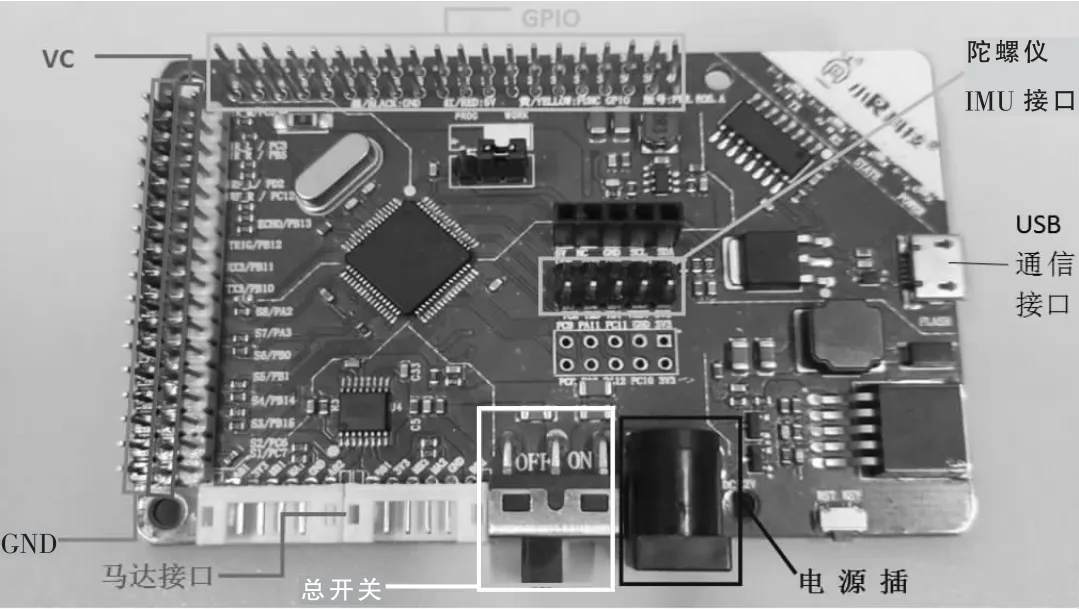
圖3 驅(qū)動板接口概覽
2 軟件部分
2.1 系統(tǒng)模塊
機器的控制系統(tǒng)主要用于控制機器人前行軌跡使其能夠靈敏避障,并正確判別及拾撿垃圾、清潔地面。采用ROS 系統(tǒng)為控制系統(tǒng),無需重新開發(fā)已有的系統(tǒng)通,只需加入一些已有開源代碼,就可以實現(xiàn)自己需要的功能。ROS 控制有以下幾個優(yōu)點:(1)程序可重復(fù)利用性。只需對開發(fā)部分進行修改,其余部分可以使用相關(guān)功能包來實現(xiàn);(2)優(yōu)秀的通信能力。可同時在一個框架內(nèi)編寫很多程序,并讓其實現(xiàn)通信,例如:從傳感器到舵機的傳感程序;(3)多種開發(fā)工具平臺。ROS 提供了二維繪圖與三維繪圖可視化工具RViz,可直接確定機器人模型,易于擴展到仿真實驗;(4)優(yōu)良的生態(tài)系統(tǒng)。ROS 能將現(xiàn)行多種硬件技術(shù)整合到一個操作系統(tǒng)中操作,各硬件的配合度遠超其他系統(tǒng)。以ROS 系統(tǒng)搭建清潔車的基礎(chǔ)框架,通過控制系統(tǒng),清潔車將執(zhí)行尋找垃圾、判別垃圾、前往拾取垃圾等步驟,如圖4 所示。

圖4 系統(tǒng)總控制過程圖
2.2 識別模塊
采取Micro python 語言語言編程的攝像頭Open CV 和超聲波技術(shù)進行識別。系統(tǒng)垃圾判別過程如下:機器人一邊發(fā)出超聲波一邊循跡,根據(jù)超聲波返回值的波動情況判斷路線中是否存在垃圾,若波動值很大則說明發(fā)現(xiàn)垃圾,啟動攝像頭拍攝下圖片。Open CV 通過算法將圖像的外部輪廓、顏色等進行解析,將解析信息與系統(tǒng)庫存儲的特征數(shù)值進行比對,若相似度較高則判別為垃圾,并通過已建立的信息庫對垃圾進行分類。為了達到理想的識別結(jié)果,我們要事先讓機器進行神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)。從而讓機器根據(jù)已有的知識將垃圾進行分類。
2.3 路徑規(guī)劃模塊

由以上推導(dǎo)出的軌道運動模型,我們可以根據(jù)眾多采樣速度數(shù)據(jù)推算最優(yōu)軌跡。
已知在速度(v,w)的二維空間中,存在無窮多數(shù)值組。只有根據(jù)機器性能與環(huán)境因素的影響方能將采樣速度控制在一定范圍內(nèi)。
為保證機器能在障礙物前停下,在最大減速度條件下,速度有一個范圍:

2.4 定位導(dǎo)航模塊
使用SLAM 模塊進行定位和建圖。SLAM 指的是將機器放入未知環(huán)境中的位置,機器能夠一邊移動一邊繪制地圖。定位是指機器在世界坐標(biāo)系下具有三個自由度的位置信息。建圖是建立機器人所感知周圍環(huán)境的地圖,地圖基本幾何元素是點,點沒有方向,只有3 個自由度的位置。
小車?yán)眉す饫走_進行SLAM,激光雷達傳感器利用光原理進行工作,可進行光探測和測距,它可以輕松探測到300 米以內(nèi)的障礙物,并準(zhǔn)確估計它們的位置。激光雷達每秒最多可以發(fā)射200 萬個點,點云中的每個撞擊點的精確(X,Y,Z)位置可以代表周邊環(huán)境的真實情況。激光雷達進行掃描障礙物時通常分為4 個步驟:點云處理、點云分割、障礙聚類、邊界框擬合。
SLAM 框架如圖5 所示,整個系統(tǒng)由前端、后端和回環(huán)檢測組成。

圖5 SLAM 流程圖
2.5 機械臂抓取
采用可視化應(yīng)用RViz 將指令信息進行可視化表達,以3D 圖像的方式將ROS 消息展現(xiàn)出來。該應(yīng)用可以通過建模來直觀體現(xiàn)出雷達傳感器感知的目標(biāo)距離,或是從Open CV已拍攝圖像值中預(yù)估出小車距其距離從而控制機械臂的抓取。在ROS 中,機器以URDF 描述RViz 生成的三維模型,每個模型可以根據(jù)自由度進行移動或驅(qū)動,從而可以通過控制模型移動來仿真機械臂的各種抓取動作。例如,當(dāng)需要抓取一個塑料瓶時,RViz 會分析攝像圖片和雷達傳感器中的距離信息與物品擺放的方位,從而根據(jù)已有的URDF 模型進行優(yōu)化,從而執(zhí)行抓取。
3 結(jié)論
本文設(shè)計了一種自帶機械臂的智能垃圾清潔車。該設(shè)備以ROS 為框架形成一套運作良好的Python 語言編程系統(tǒng)。智能車憑借電力可完成室內(nèi)導(dǎo)航循跡、垃圾的自動識別與撿拾等基本操作。為用戶日常生活中的垃圾分類和衛(wèi)生清潔提供了極大的便利。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
