基于STM32變電站排障機器人的設計與實現
2022-03-07 10:11:10陳曉偉
電子測試 2022年24期
陳曉偉
(廣東精益電力設備有限公司,廣東揭陽,522000)
0 引言
隨著科學技術的快速發展,智能化技術的開發越來越快,在惡劣的環境或特殊環境下用智能機器人代替人類工作,讓智能機器人為人類服務已成為人們研究開發智能機器人的方向之一。由于在惡劣和特殊環境下進行路面排障、貨物搬運、軍事偵察和處理危險物品,會造成人員和資源的大量浪費,甚至發生人身傷害,因此,設計制造一種智能排障機器人在特殊環境下排除障礙十分必要[1-2]。本文設計了基于STM32的智能排障機器人。排障機器人以STM32單片機作為系統的主控器,以履帶式結構作為機械平臺[3-5],結合紅外測距傳感器以及兩自由度機械臂和OV7670 攝像頭模塊實現的智能排障機器人,具有遠程視頻遙控控制[6]、準確排除障礙物的功能。
1 系統整體設計方案
智能排障機器人的系統架構設計如圖1所示。該裝置系統由控制子系統、電源子系統、驅動子系統、機械手系統、外部傳感子系統組成,其中控制系統分為主控系統和可控系統,主控系統為主控制器STM32單片機,可控制系統由各個模塊組成;電源子系統為整個裝置供電,包括鎳鎘蓄電池和電源管理模塊;外部傳感系統為主控制器提供輸入信息,包括無線傳輸模塊、紅外測距模塊,圖像監測模塊;機械手子系統主要由兩自由度機械臂和夾爪組成,接收主控制器的輸出信號并進行障礙物的夾取和搬運。智能排障機器人總體系統架構如圖1所示。
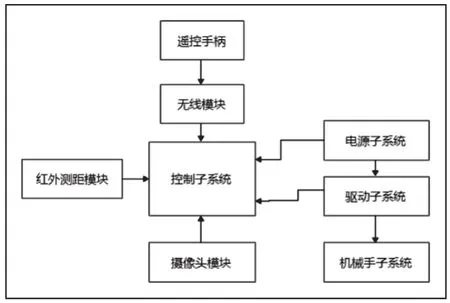
圖1 智能排障機器人總體系統架構
2 系統設計
2.1 控制子系統
為了滿足本設計的無線監控排障機器人控制系統的需要,提出了一種STM32+PC+遙控手柄為控制模式和基于無線通訊的控制系統[7-11]。通過上位機對攝像頭采集的圖像進行實時監控,用遙控手柄對機械手和智能機器人平臺發出控制命令,核心控制器STM32通過無線設備接收數據和傳輸數據給各個模塊。
STM32F103ZET6的內核是ARM32位的Cortex-TM-M3 CPU,最高的工作頻率高達72MHz,可以更好地完成高端運算。由于配置的存儲器內存大,從256K至512K字節的內存存儲器,高達64K字節的 SRAM,帶有4個片選的靜態存儲器控制器,使得它可以存儲大量信息。STM32核心控制板如圖2所示。
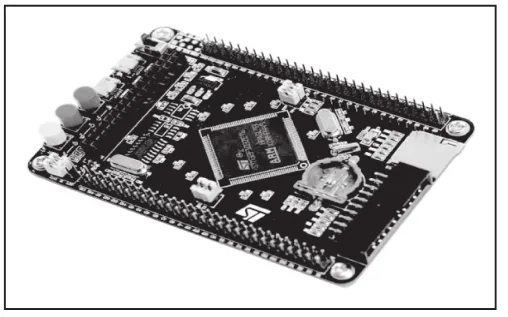
圖2 STM32的核心控制板
2.2 電源子系統
電源子系統由電池和電源管理模塊組成。根據我們的需要,我們在設計中選用鎳鎘蓄電池。
電源管理模塊的基本要求是提供穩定的電壓,各路電壓信號不能互相干擾。它的作用是對7.2V 1800mA鎳鎘蓄電池進行電壓調節。根據系統各部分正常工作的需要,各模塊的電壓值可分為5V、6.5V、7.2V三個檔,電源管理單元主要用于以下三個方面:
(1)采用穩壓管芯片LM2576將電源電壓穩壓到5V后,給單片機系統電路供電。
(2)經過一個二極管降至6.5V左右后供給攝像頭.
(3)直接給直流驅動電機、驅動芯片L298電路供電。
2.3 驅動子系統
驅動子系統的主要功能是通過控制子系統的指令對排障機器人的電機驅動模塊進行控制,使其完成各種動作。排障機器人的驅動子系統由穩定性高的履帶式平臺和2個直流電機以及電機驅動器組成。
直流電機專用驅動器,所用芯片l298屬于H橋集成電路,其輸出電流為2000mA,最高工作電壓是36V,最高工作電流是4A,可以驅動繼電器,步進電機,同時驅動板設有與單片機直接相連的接口輸入端,可以很方便地用單片機控制。并以7.2V直流電機驅動裝置,最大運行度18m/min(0.3m/s),電機轉矩1kg.cm,電機功率2.1W。
2.4 機械手子系統
機械手需要在高精度、負重的環境工作,其自身的結構必須要適應這樣的工作強度,所以優良的選材和合理的結構設計能夠給機械手的運行奠定扎實的基礎[12]。機械手子系統采用兩自由度的機械臂和夾爪,如圖3所示,通過主控制器產生的PWM脈沖信號完成對舵機0到180度之間運轉控制,使機械手完成對障礙物的夾取,起到排障的功能。
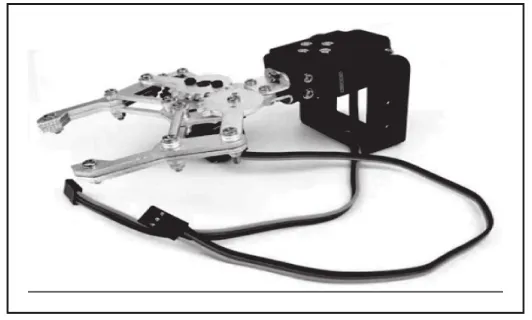
圖3 排障機械手
機械手自由度選用金屬數字舵機MG996R,該數字舵機不但擁有精準的定位能力,,而且面對高強度的運行場景,該數字舵機也在運行過程中保持平均的扭力,在一個位置上有更有力的固定力量。
2.5 外部傳感模塊
外部傳感模塊是整個機器人系統的檢測反饋機構。它的作用是利用各種不同功能的傳感器對周圍環境的具體信息進行采集,然后將數據發送到決策模塊,作為決策模塊進一步分析與判斷的依據。
(1)排障機器人采用紅外測距傳感器,具有一對完善的發射、接收裝置,即為紅外線的發射信號,設備內的二極管接收信號。其工作原理就是通過測距模塊中的紅外線發射器發射出一束紅外線,當這束光線照到物體后就會反射回來,傳導模塊中的接收信號區,根據紅外線的發射與接收之間的時間差,經過數據的處理運算得到兩物之間的距離。而本論文所采用的紅外測距模塊GP2YOA02YKOF,如圖4所示,GP2YOA02YKOF有3個端口,分別是電源端,信號端和接地端。GP2YOAO2YKOF測量距離的范圍在20cm-150cm之間,測量誤差小于0.5cm。

圖4 紅外測距傳感器
(2)排障機器人采用NRF24L01無線數傳模塊,該無線數傳模塊是一款工作在2.4-2.5GHz世界通用ISM頻段的芯片,其輸出功率頻道選擇和協議的設置可以通過SPI接口進行設置極低的電流消耗。小型:內置2.4GHz天線,體積小;便于開發:由于鏈路層完全集成在模塊上,非常便于開發;在空曠條件250Kb的波特率,在240米以上都有信號。在進行遠程控制排障時,通過NRF24L01無線數傳模塊把單片機連接到機械手柄上。通過機械手柄控制排障機器人完成前進、后退、左轉、右轉及障礙物的抓取。
(3)排障機器人采用OV7670攝像頭模塊[13],如圖5所示,它屬于一種圖像傳感器,它的整體結構比較小,大大縮減機器人的空間。該攝像頭模塊在3.3V電壓下進行工作,提供單片機VGA攝像頭和影像處理器的所有功能。利用攝像頭模塊收集排障機器人周圍的圖像信息傳回上位機軟件中顯示,通過實時監控,通過操作上位機控制軟件讓排障機器人完成排障工作。
3 程序設計
3.1 機器人排障主程序設計
排障機器人排障主程序流程圖如圖6所示。排障工作流程需要對各個模塊進行初始化,設定各自的工作模式并對各個變量定義。初始化完成以后,開始檢測攝像頭模塊,驅動模塊,機械手模塊與控制單片機的連接是否正常, 如果異常則查找原因,并進行調節。
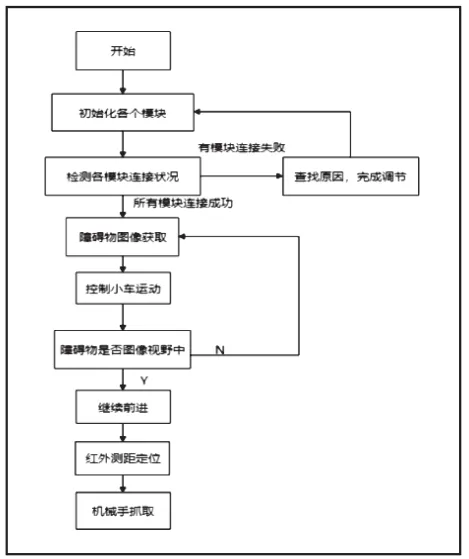
圖6 排障機器人排障主程序流程圖
其次上位機對攝像頭模塊收集到的圖像信息進行處理,呈現清晰的圖像,通過手柄控制排障機器人完成前進后退以及轉彎動作,向障礙物靠近,在機器人行走的過程中,實時檢測障礙物是否在視野中,如果出現障礙物離開攝像頭視野,需要通過及時調整機器人的前進方向,確保障礙物出現在上位機監控圖像中。
再次,在機器人前進過程中,紅外測距模塊實時測量障礙物與機器人的具體距離,當機器人行進到距離障礙物一米距離時,機器人停止前進,然后控制機械手完成對障礙物的夾取工作。
3.2 控制機械手的流程設計
控制機械手的動作,需要各模塊的配合工作,遙控手柄的無線傳輸信號傳遞到核心控制器中,核心控制器控制電機驅動模塊驅動舵機,使機械手完成對障礙物夾取的動作。機械手控制流程如圖7所示。
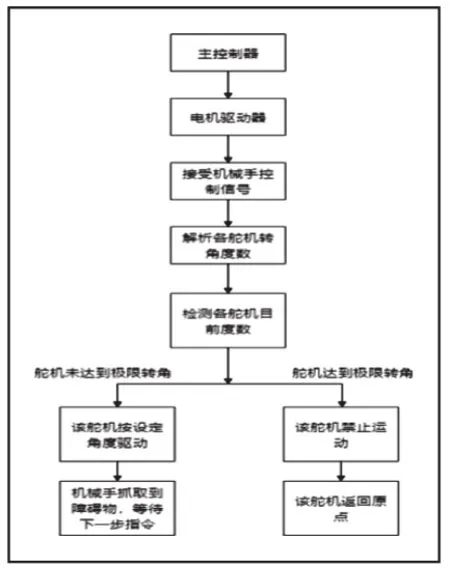
圖7 機械手控制流程圖
3.3 機器人動作流程設計
機器小車運動,需要依靠stm32核心控制模塊控制電機驅動模塊,通過控制單片機IO口輸出電平的高低轉換使小車實現前進后退以及轉彎的功能,電機驅動模塊的四個邏輯輸入信號端口連接在單片機的IO口端,其中利用IN1、IN2來控制左輪,IN3、IN4控制右輪,單片機的PWM信號輸入電機驅動模塊的邏輯信號端,能使電機的轉速發生變化。機器人動作程序流程圖如圖8所示。
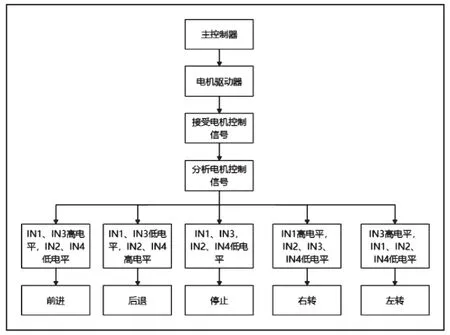
圖8 機器人動作程序流程圖
3.4 紅外測距的程序設計
我們采用紅外測距傳感器,當機器小車在運行過程中,測距模塊實現測量機器小車與障礙物的距離,當測量距離達到臨界距離(避免發生碰撞的最小安全距離)時,機器小車減速運行,并把測量距離與控制器設定的最小距離實時對比,當測量距離等于最小距離時,機器小車停止運動。
4 測試與分析
硬件和軟件完成后,對整個系統進行了實際測試。選擇5個寬為5cm,重0.3kg的塑料盒,讓智能排障小車在不同距離進行抓舉。如圖9,圖10和圖11所示,排障機器人通過攝像頭模塊進行實時監控,利用紅外線測距模塊來計算車體與障礙物的距離,進行定位,進而對障礙物進行抓取。綜合多次實驗結果發現,智能車對障礙物的測距誤差較少,定位準確率較高,能夠實現連貫抓取,達到了研究的預期目的。
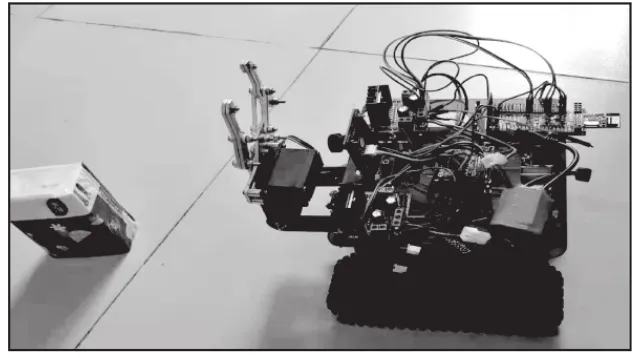
圖9 排障機器人定位障礙物
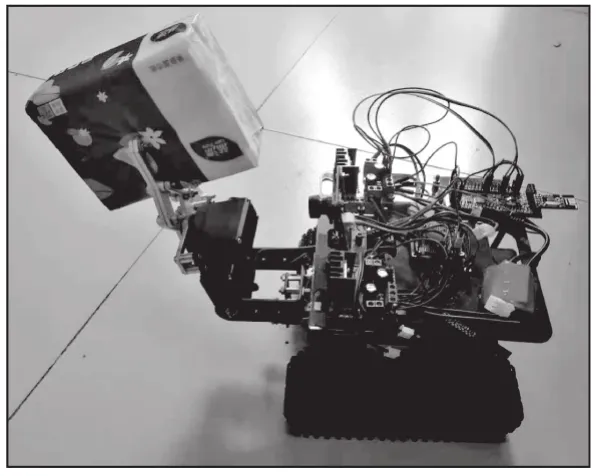
圖10 排障機器人夾取障礙物

圖11 上位機監控圖像
5 結語
設計完成了一款基于STM32智能排障機器人。該機器人自帶機械臂, 可實現遠程視頻遙控控制、準確排除障礙物等功能。該智能排障機器人具有運行速度快且比較平穩、機械手工作精度高等特點, 可以在工業生產中推廣。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
表面工程與再制造(2019年6期)2019-08-24 06:40:04
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
電子制作(2018年12期)2018-08-01 00:48:04