三維激光掃描進行隧道變形探測的可行性研究
2022-03-06 02:18:36丁鴿陳艷華燕立爽彭健
城市勘測 2022年1期
關(guān)鍵詞:變形
丁鴿,陳艷華,燕立爽,彭健
(1.濟南市勘察測繪研究院,山東 濟南 250013; 2.濟南市房產(chǎn)測繪研究院,山東 濟南 250001)
1 引 言
隨著激光技術(shù)的不斷發(fā)展,三維激光掃描技術(shù)的測量精度不斷提高,其在變形監(jiān)測、工程測量、交通現(xiàn)場勘測、橋梁變形監(jiān)測、古建筑和文物保護、數(shù)字城市等領(lǐng)域的應(yīng)用不斷擴大。尤其在高精度變形監(jiān)測領(lǐng)域,三維激光掃描技術(shù)可以對被掃描物體進行全方位數(shù)據(jù)采集,從而進行整體監(jiān)測,有效彌補了傳統(tǒng)變形監(jiān)測手段的片面性和局限性。對獲取的點云數(shù)據(jù)進行恰當(dāng)?shù)奶幚矸治鍪侨S激光掃描技術(shù)應(yīng)用于變形監(jiān)測的關(guān)鍵步驟,其中切片的提取、不同測站間切片的配準尤為重要。龔友平等[1]對點云數(shù)據(jù)的切片采用近似輪廓跟蹤算法完成切片數(shù)據(jù)的細化處理,但此方法需對點云數(shù)據(jù)進行預(yù)處理,剔除多重輪廓的數(shù)據(jù)。唐琨[2]等提出利用中軸線上節(jié)點坐標(biāo)偏移的方法進行切片提取,該方法具有一定的評定精度,但無法保證切片提取的精確性,標(biāo)靶的位置和數(shù)量等觀測條件設(shè)定較為嚴格。目前,國內(nèi)外對于點云數(shù)據(jù)的處理雖進行了大量研究,但在確定可變區(qū)域的大小方面研究還比較缺乏。本文提出了一種基于三維激光掃描的隧道變形探測方法,實驗說明了方法的有效性。
2 隧道變形探測方法
本文隧道變形探測方法是根據(jù)基準面與隧道內(nèi)壁點云法向量及地面的關(guān)系,利用最小二乘算法和基于法向量基準面的搜索算法,確定最佳基準面,獲取點云數(shù)據(jù)的切片,應(yīng)用改進的ICP算法對不同測站的切片數(shù)據(jù)進行配準,再利用KNNS算法搜索不同切片之間大于臨界距離的點數(shù),并計算得出這些點所圍成的最大區(qū)域,從而獲得隧道可探變形區(qū)域的最小范圍。
2.1 最佳基準面的確定
進行切片提取,首先要對獲取的點云數(shù)據(jù)進行平面擬合,主要方法有特征值法、二維正交TLS法[3]等。本文利用最小二乘算法[4]和基于法向量最佳基準面的搜索算法確定最佳基準面,通過基準面確定用于探測變形區(qū)域的切片。
假定地面點云數(shù)據(jù)包含n個點{(xi,yi,zi):i=1,2,…,n},其中xi和yi為沒有誤差的自變量,zi為含有誤差的因變量,擬合平面中z關(guān)于x和y的函數(shù)為:
z=f(x,y;p,q,r)=p+qx+ry
(1)
根據(jù)最小二乘原理,p,q和r的選取應(yīng)使式(2)的值最小:
(2)

ax+by+cz=0
(3)
假定基準面通過坐標(biāo)原點,形式如式(4):
a′x+b′y+c′z=0
(4)
利用基準面與隧道地面垂直的關(guān)系,建立如式(5)的關(guān)系式,從而確定了基準面參數(shù)的關(guān)系式。
(5)
2.2 切片的提取
(1)將儀器架設(shè)在隧道斷面中心位置,對中整平,全景掃描隧道,截取部分掃描點云如圖1(b)所示。

圖1 掃描實驗場

(6)
(4)計算點云到基準平面的距離截取所需任何位置、任何寬度(點云區(qū)域范圍內(nèi))的橫斷面。
2.3 切片數(shù)據(jù)的配準
ICP算法[8]是通過迭代計算使兩個點集的距離平方和最小而獲得轉(zhuǎn)換參數(shù),三維空間R3存在PL={pl1,pl2…pln,pli∈R3}和PR={pr1,pr2…prn,pri∈R3}兩組各含n個坐標(biāo)點的集合,其中PL為轉(zhuǎn)換點集,PR為對象點集。三維空間點集PL中各點經(jīng)過三維空間變換后與點集PR中的點一一對應(yīng),其轉(zhuǎn)換公式如式(7)所示。
Pri=R·Pli+T
(7)
上式中,R為三維旋轉(zhuǎn)矩陣,T為平移向量。最小化距離平方和公式如式(8):
(8)
本文采用改進的ICP算法,其步驟如下:
(1)初始化三維旋轉(zhuǎn)矩陣R和平移向量T。

(9)
2.4 隧道可探變形區(qū)域的確定
KNNS搜索算法[5,6]是從數(shù)據(jù)集中找出查詢對象的k個最近鄰點。設(shè)數(shù)據(jù)集S={xi|1≤i≤n},xi=[xi1,xi2,…,xim]。其中n為樣本數(shù),m為數(shù)據(jù)集維數(shù),xi為給定的任意樣本、度量函數(shù)為D,xi的k(k≤n)個最近鄰點集合S′符合:
?p∈S′|?h∈S-S′:D(xi,y)≤D(xi,h)
(10)
KNNS需要計算一個查詢點xi到所有其他訓(xùn)練樣本之間的距離[7],然后對距離值排序得到k個最近鄰點。為了減少搜索時間,常用的KNNS算法是從以給定查詢點xi為中心、半徑相對比較小的一個超球體內(nèi)開始搜索,然后采用一個迭代方法,逐步擴大半徑,直到超球半徑超過或等于最小半徑rmin為止,此時該超球至少包含k個最近鄰點。其中最小半徑rmin為以xi為中心、包含k個最近鄰點的最小超球半徑。
3 實驗與結(jié)果分析
3.1 數(shù)據(jù)采集實驗方案
本實驗采用RIEGL Laser Measurement Systems GmbH型號的三維激光掃描儀對某隧道進行掃描,實驗方案如下:
(1)為獲得隧道兩側(cè)較為均勻的點云數(shù)據(jù),將三維激光掃描儀架設(shè)在隧道中間位置,并標(biāo)記特征點,對儀器進行對中整平操作。
(2)設(shè)置三維激光掃描儀的距離分辨率為 2 mm,豎直角測量范圍為38°~125°,水平角度范圍為222°~365°,進行全局掃描。為了避免偶然誤差的影響,提高掃描精度,對隧道進行兩次掃描。
(3)不搬動儀器,設(shè)置儀器的距離分辨率為 4 mm,豎直角測量范圍為39°~126°,水平角度范圍為153°~295°,同樣對隧道進行兩次掃描。至此,獲得第一期不同距離分辨率下的隧道掃描點云數(shù)據(jù)。
(4)半個月后,對隧道進行第二期掃描監(jiān)測,重復(fù)步驟(2)、步驟(3),獲得兩期隧道掃描監(jiān)測數(shù)據(jù),如表1所示。

三維激光掃描的點云數(shù)據(jù) 表1
3.2 數(shù)據(jù)處理與結(jié)果分析
根據(jù)獲得的點云數(shù)據(jù)獲得切片提取基準面方程:距離分辨率為 2 mm時,基準面方程為12.503x-56.57y+z=0;距離分辨率為 4 mm時,基準面方程為29.609x+32.304y+z=0。利用KNNS算法進行搜索得到點云之間的距離,通過改進的ICP算法進行不同測站的點云數(shù)據(jù)配準,然后進行搜索,結(jié)果如表2、表3所示。
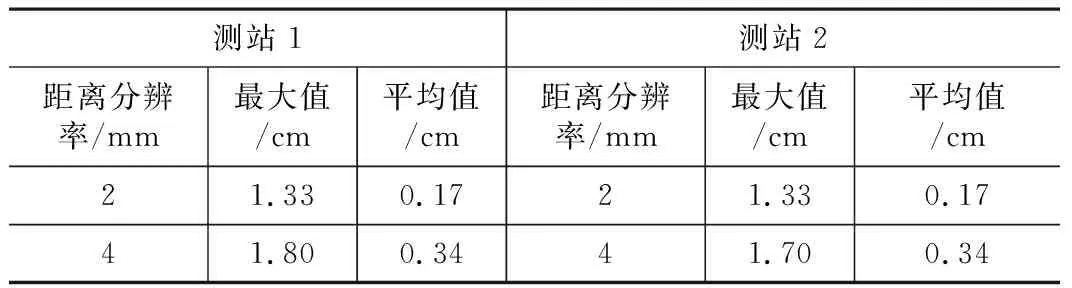
同一測站不同分辨率點云數(shù)據(jù)的掃描間隙 表2

不同測站數(shù)據(jù)配準后點云數(shù)據(jù)的掃描間隙 表3
由表2可知,在儀器不發(fā)生變動的情況下,由于掃描視角及偶然誤差的影響,相同條件下同一測站兩次掃描存在掃描間隙。距離分辨率為 2 mm時,掃描間隙最大值為 1.33 cm;距離分辨率為 4 mm時,掃描間隙最大值為 1.80 cm。距離分辨率為 4 mm時掃描間隙的平均值為 2 mm時平均值的2倍,表明當(dāng)距離分辨率較高時獲得的點云數(shù)據(jù)精度較高,偶然誤差較小。由表3可知,不同測站數(shù)據(jù)進行配準后,對點云數(shù)據(jù)進行搜索,由于存在配準誤差,獲得的掃描間隙最大值存在偶然誤差。距離分辨率為 4 mm時的掃描間隙的平均值比距離分辨率為 2 mm時大 1.2 mm,表明距離分辨率設(shè)置較小時獲得的點云數(shù)據(jù)精度較高,點云質(zhì)量較好。
對獲得的點云數(shù)據(jù)進行KNNS算法搜索獲得不同點云數(shù)據(jù)距離平均值的大小,分析結(jié)果如表4、表5所示(點數(shù)越多,表示選取的監(jiān)測面積越大)。其中A、B、C、D分別代表測站1距離分辨率為 2 mm和 4 mm時的4次掃描,E、F、G、H分別代表測站2距離分辨率為 2 mm和 4 mm時的四次掃描。可以看出選取監(jiān)測面積越大,點云數(shù)據(jù)間的平均距離越小,說明當(dāng)選擇變形面積來進行變形探測時,應(yīng)盡可能選擇較大區(qū)域,以較好地反映變形情況。

同一分辨率不同點數(shù)的點云數(shù)據(jù)間的平均距離(單位/mm) 表4

云數(shù)據(jù)配準后不同點數(shù)的點云數(shù)據(jù)間的平均距離(單位/mm) 表5
通過以上分析,同一測站不同觀測點云之間經(jīng)過KNNS算法搜索獲得點云數(shù)據(jù)間的最大距離值為 1.8 cm,即將 1.8 cm作為點云之間存在的偶然誤差的極限值。由表3,統(tǒng)計經(jīng)過ICP算法配準后的點云距離大于 1.8 cm的點數(shù)分別為650個、664個、193個、209個,其中前兩個是距離分辨率為 2 mm,后兩個是距離分辨率為 4 mm時的統(tǒng)計結(jié)果。
理想狀況下,一定點云形成的面積最大的圖形為正方形,故距離分辨率為 2 mm的情況下,664個點所形成的最大區(qū)域近似為26個點×25個點的區(qū)域,即所形成的面積為 5.0 cm×4.8 cm的區(qū)域;距離分辨率為 4 mm的情況下,209個點所形成的最大區(qū)域近似為15個點×14個點,即所形成的面積為 5.6 cm×5.2 cm。當(dāng)進行三維激光掃描測量,對測量的點云數(shù)據(jù)進行變形分析時,不同距離分辨率下,選擇大于上述面積的區(qū)域可以反映出變形,即點云數(shù)據(jù)可探變形區(qū)域的最小區(qū)域為:距離分辨率為2mm時為5.0cm×4.8cm,距離分辨率為 4 mm時為 5.6 cm×5.2 cm,表明利用三維激光掃描可以進行隧道的變形監(jiān)測。
4 結(jié) 論
本文通過對某隧道進行掃描,對獲得的點云數(shù)據(jù)進行處理分析,應(yīng)用KNNS搜索算法和改進的ICP算法做相關(guān)的計算,得出進行三維激光掃描觀測時,距離分辨率越高,獲得的點云數(shù)據(jù)精度越高,數(shù)據(jù)處理中可以較好地削弱偶然誤差的影響。對點云數(shù)據(jù)進行進一步比較分析,得到三維激光掃描的可探性變形區(qū)域,即在進行變形分析應(yīng)該選取的最小區(qū)域,這對后續(xù)三維激光掃描應(yīng)用于隧道變形監(jiān)測具有一定的指導(dǎo)意義。
猜你喜歡
智慧少年·故事叮當(dāng)(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學(xué)研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學(xué)版(2020年11期)2020-02-01 06:26:58
作文周刊·小學(xué)二年級版(2018年29期)2018-11-26 11:20:28
小學(xué)生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數(shù)學(xué)小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(2016年12期)2016-12-26 21:37:36
