轉(zhuǎn)向系統(tǒng)十字軸萬向節(jié)傳動(dòng)的計(jì)算分析與匹配
2022-03-06 02:43:34侯訓(xùn)波楊國庫廖應(yīng)杰于剛冷冶
汽車零部件 2022年2期
侯訓(xùn)波,楊國庫,廖應(yīng)杰,于剛,冷冶
[1.大連創(chuàng)新零部件制造公司,遼寧大連 116620;2.廈門金龍聯(lián)合汽車工業(yè)有限公司,福建廈門 361023;3.重汽(威海)商用車有限公司,山東威海 264400]
0 引言
十字軸萬向節(jié)是轉(zhuǎn)向系統(tǒng)的重要部件,可實(shí)現(xiàn)軸與軸之間變角度傳遞運(yùn)動(dòng)和轉(zhuǎn)矩,其結(jié)構(gòu)簡單、傳動(dòng)可靠、效率高。目前,汽車轉(zhuǎn)向系統(tǒng)普遍采用雙十字軸式萬向節(jié)來實(shí)現(xiàn)等速傳動(dòng),不過在實(shí)際應(yīng)用中實(shí)現(xiàn)很困難,只能盡可能地逼近等速傳動(dòng)。而駕駛員對(duì)車輛的轉(zhuǎn)向操作要求卻越來越高,實(shí)際的十字軸萬向節(jié)傳動(dòng)會(huì)影響轉(zhuǎn)向系統(tǒng)力矩波動(dòng),導(dǎo)致方向盤手感較差。文中通過對(duì)單十字軸萬向節(jié)的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)的基本傳動(dòng)特性進(jìn)行計(jì)算,將其推演至雙十字軸萬向節(jié)式轉(zhuǎn)向系統(tǒng)的傳動(dòng)特性分析中,歸納出等速傳動(dòng)的同步匹配和等幅匹配的基本條件,以便實(shí)現(xiàn)較好的轉(zhuǎn)向手感和等效力矩傳遞,供轉(zhuǎn)向系統(tǒng)工程師應(yīng)用參考。
1 單十字軸萬向節(jié)運(yùn)動(dòng)學(xué)特性分析
文中設(shè)輸入軸1與輸出軸2通過十字軸萬向節(jié)連接,該單十字軸萬向節(jié)的運(yùn)動(dòng)學(xué)特性可由以下3個(gè)變量來描述:表示輸入軸1的轉(zhuǎn)角、表示輸出軸2的轉(zhuǎn)角、表示兩軸的夾角(主要指0<<π2的銳角,通常≤π6;=0表示為同軸)。同時(shí),類比汽車轉(zhuǎn)向系統(tǒng),從輸入軸端向輸出軸端來看,設(shè)以起點(diǎn)基準(zhǔn)右側(cè)區(qū)域的轉(zhuǎn)角為正,左側(cè)區(qū)域的轉(zhuǎn)角為負(fù),并定義輸入軸1與輸出軸2所形成平面為交軸平面1-2;輸入軸1節(jié)叉平面為平面,垂直于輸入軸1并通過十字軸中心點(diǎn)的平面為平面1;輸出軸2節(jié)叉平面為平面,垂直于輸出軸2并通過十字軸中心點(diǎn)的平面為平面2。
單十字軸萬向節(jié)的結(jié)構(gòu)簡圖如圖1所示。在十字軸萬向節(jié)運(yùn)動(dòng)過程中,輸入軸節(jié)叉與十字軸鉸接點(diǎn)將在平面1內(nèi)做圓周運(yùn)動(dòng),而輸出軸節(jié)叉與十字軸鉸接點(diǎn)將在平面2內(nèi)做圓周運(yùn)動(dòng)。同時(shí),輸入軸每旋轉(zhuǎn)180°時(shí),其傳動(dòng)特性重復(fù)且相同。
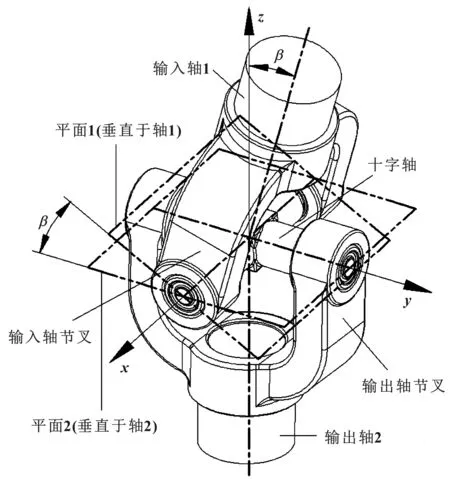
圖1 單十字軸萬向節(jié)的結(jié)構(gòu)簡圖
如圖1所示,當(dāng)前的輸入軸節(jié)叉平面與交軸平面1-2為垂直關(guān)系,以此為起點(diǎn)建立空間幾何坐標(biāo)系,來描述十字軸鉸接點(diǎn)的運(yùn)動(dòng)軌跡,簡化后的空間幾何坐標(biāo)如圖2所示。其中,輸入軸節(jié)叉上十字軸鉸接點(diǎn)定義為,輸出軸節(jié)叉上十字軸鉸接點(diǎn)定義為,它們?cè)诳臻g幾何坐標(biāo)系中的向量坐標(biāo)定義為:=(,,)、=(,,)。
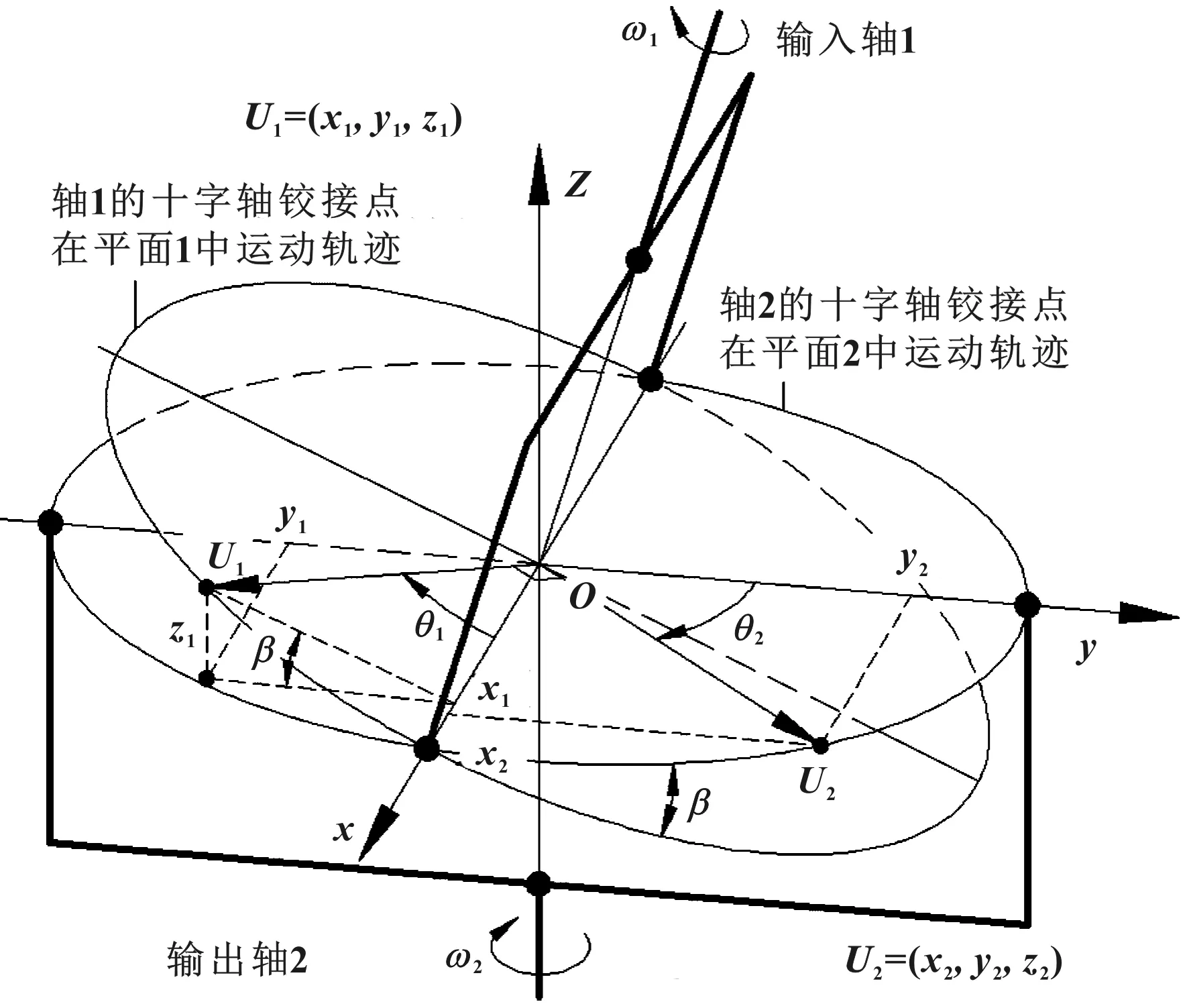
圖2 平面A垂直平面1-2時(shí)單十字軸萬向節(jié)運(yùn)動(dòng)軌跡
當(dāng)輸入軸節(jié)叉平面與交軸平面1-2垂直時(shí)作為起點(diǎn),并由于十字軸軸線始終保持垂直,在空間幾何坐標(biāo)系中,二向量也保持了垂直狀態(tài):⊥,使向量數(shù)量積:·=0,即:++=0,可得出如下關(guān)系式:
tan=tancos。
(1)
設(shè)為有正負(fù)號(hào)的向上圓整數(shù),其表達(dá)式為:

(2)
根據(jù)式(1)和式(2)可得輸出軸轉(zhuǎn)角關(guān)系式為:
=π+arctan(tancos)。
(3)
如圖1所示,若將當(dāng)前輸入軸旋轉(zhuǎn)π/2角后,其輸入軸節(jié)叉平面將與交軸平面1-2重合為一個(gè)平面,以此作為起點(diǎn)來描述十字軸鉸接點(diǎn)的運(yùn)動(dòng)軌跡,簡化后的空間幾何坐標(biāo)如圖3所示。
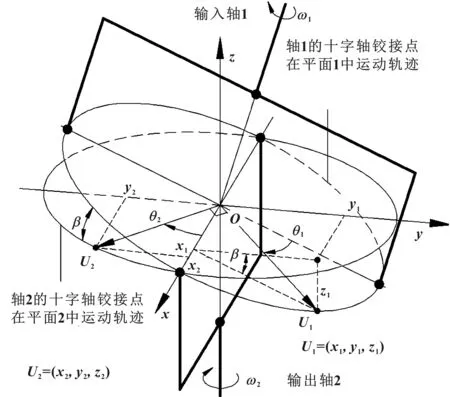
圖3 平面A與平面1-2重合時(shí)單十字軸萬向節(jié)運(yùn)動(dòng)軌跡
同理,以輸入軸節(jié)叉平面與交軸平面1-2重合時(shí)作為起點(diǎn),可得出輸出軸轉(zhuǎn)角關(guān)系式如下:
tan=tancsc。
(4)
根據(jù)式(2)和式(4)可得出輸出軸轉(zhuǎn)角關(guān)系式為:
=π+arctan(tancsc)。
(5)
式(3)和式(5)中的轉(zhuǎn)角起點(diǎn)相差π/2,若將式(3)中轉(zhuǎn)角和均增加初始相位轉(zhuǎn)角π2后,則式(3)可轉(zhuǎn)化為式(5),因此所推導(dǎo)的式(3)和式(7)是等效的,均能描述輸入軸1和輸出軸2的轉(zhuǎn)角關(guān)系,可任選其一,區(qū)別僅是起點(diǎn)位置不同。
為統(tǒng)一分析方法,以輸入軸節(jié)叉平面與交軸平面1-2重合時(shí)作為起點(diǎn),對(duì)單十字軸萬向節(jié)的轉(zhuǎn)角關(guān)系按式(4)和式(5)進(jìn)行計(jì)算。轉(zhuǎn)角和均為時(shí)間函數(shù),將式(4)兩端分別對(duì)時(shí)間進(jìn)行求導(dǎo),可得出兩軸轉(zhuǎn)角速度:=dd和=dd的關(guān)系式如下:
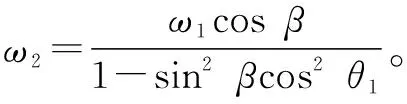
(6)
設(shè)兩軸夾角=15°、20°、25°,當(dāng)輸入軸轉(zhuǎn)角速度=300°/s時(shí),根據(jù)式(5)和式(6)的計(jì)算結(jié)果,繪制輸入軸轉(zhuǎn)角與角度差||-||和角速度差||-||的特性曲線如圖4和圖5所示。
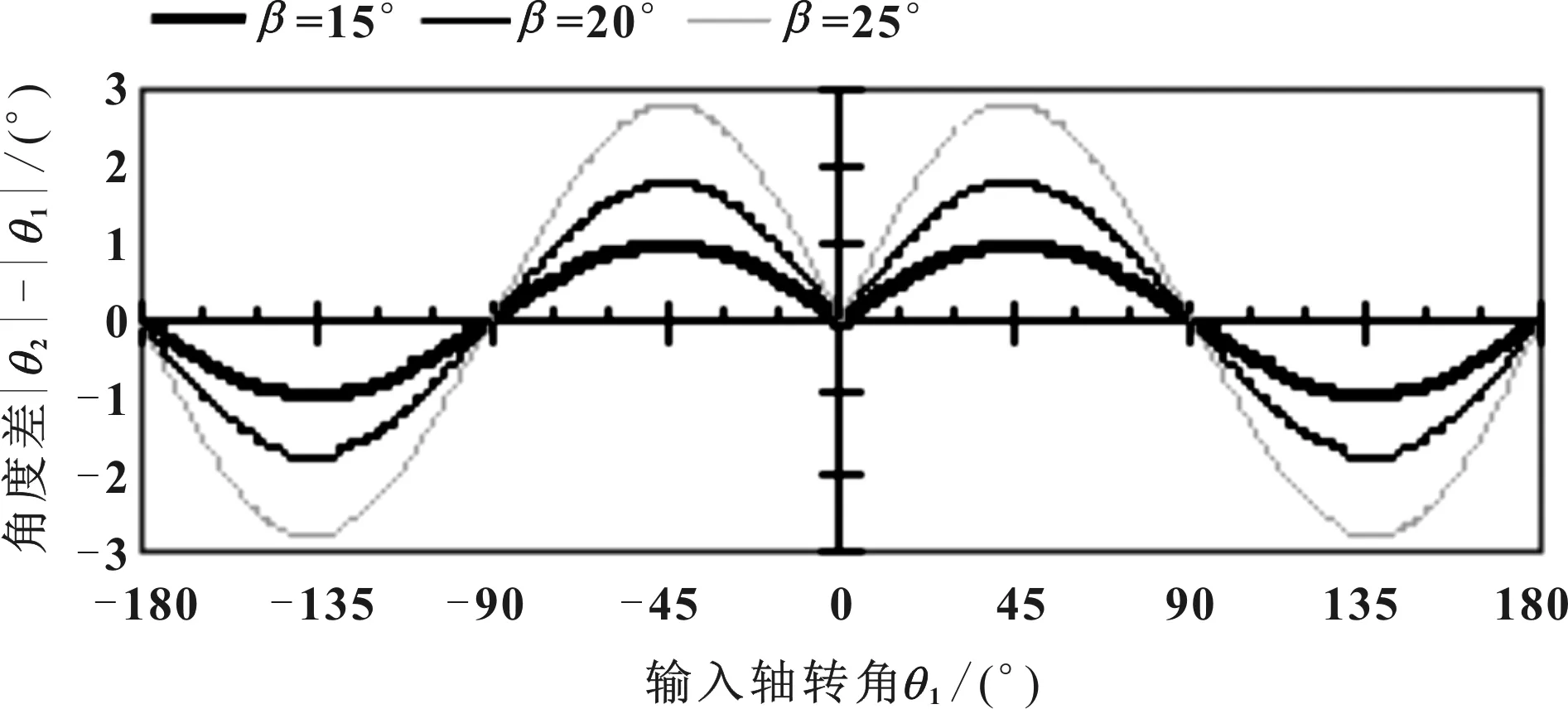
圖4 不同軸夾角β的兩軸角度絕對(duì)值差特性曲線
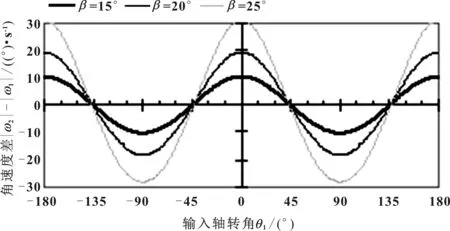
圖5 不同軸夾角β的兩軸角速度絕對(duì)值差特性曲線
由圖4和圖5的特性曲線可見,隨軸夾角增大,單十字軸萬向節(jié)傳動(dòng)的轉(zhuǎn)角差和轉(zhuǎn)角速度差也增大;以輸入軸節(jié)叉平面與交軸平面1-2重合時(shí)作為起點(diǎn),當(dāng)正反旋轉(zhuǎn)時(shí),相同軸夾角的轉(zhuǎn)角差和轉(zhuǎn)角速度差特性均具有對(duì)稱性;在360°整周旋轉(zhuǎn)過程中,相同軸夾角時(shí)均出現(xiàn)了兩個(gè)完全一致的周期性波動(dòng),但角度差峰值點(diǎn)與角速度差峰值點(diǎn)相差45°;同時(shí),在同一周期中角度差的峰谷絕對(duì)值相同,相對(duì)于零差線具有對(duì)稱性,角速度差的峰谷絕對(duì)值不同,則屬于非對(duì)稱關(guān)系。這些都不利于等速傳動(dòng)。
2 單十字軸萬向節(jié)動(dòng)力學(xué)特性分析
在忽略傳動(dòng)損失情況下,根據(jù)動(dòng)能等量傳遞原理,則有·=·關(guān)系,其中表示輸入軸力矩,表示輸出軸力矩,再結(jié)合式(6),可得如下關(guān)系式:

(7)
由式(7)可知,當(dāng)輸出軸的負(fù)載力矩已知時(shí),可求得輸入軸的力矩。同時(shí),依據(jù)反饋力矩傳動(dòng)比12關(guān)系式,可得出不同軸夾角的傳動(dòng)比特性曲線如圖6所示。
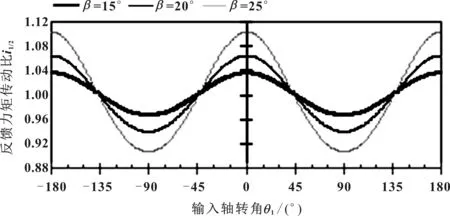
圖6 不同軸夾角β的反饋力矩傳動(dòng)比特性曲線
當(dāng)輸出軸負(fù)載力矩恒定時(shí),需手力轉(zhuǎn)動(dòng)輸入軸來克服該負(fù)載力矩。從圖6中的反饋力矩傳動(dòng)比特性曲線可以看出,對(duì)應(yīng)手力將產(chǎn)生波動(dòng),這也不利于等效負(fù)載力矩的反饋,甚至?xí)`導(dǎo)駕駛者認(rèn)為轉(zhuǎn)向負(fù)載力矩也是波動(dòng)的。上述單十字軸萬向節(jié)所具有的不等效力矩反饋特性,按式(7)所表達(dá)的關(guān)系,實(shí)際上也是不等速原因所造成的。對(duì)比圖5與圖6的特性曲線可以看出,轉(zhuǎn)角速度差與反饋力矩傳動(dòng)比具有相同規(guī)律性,且波動(dòng)是同步的。
3 雙十字軸萬向節(jié)傳動(dòng)的特性計(jì)算
在轉(zhuǎn)向系統(tǒng)應(yīng)用中,通常把兩個(gè)十字軸萬向節(jié),通過中間軸連接,讓第一個(gè)萬向節(jié)與第二個(gè)萬向節(jié)同步反向運(yùn)動(dòng),從而抵消第一個(gè)萬向節(jié)的不等速轉(zhuǎn)動(dòng),最終實(shí)現(xiàn)最大很度地逼近等速傳動(dòng)。其結(jié)構(gòu)組成及傳遞效應(yīng)關(guān)系如圖7所示。
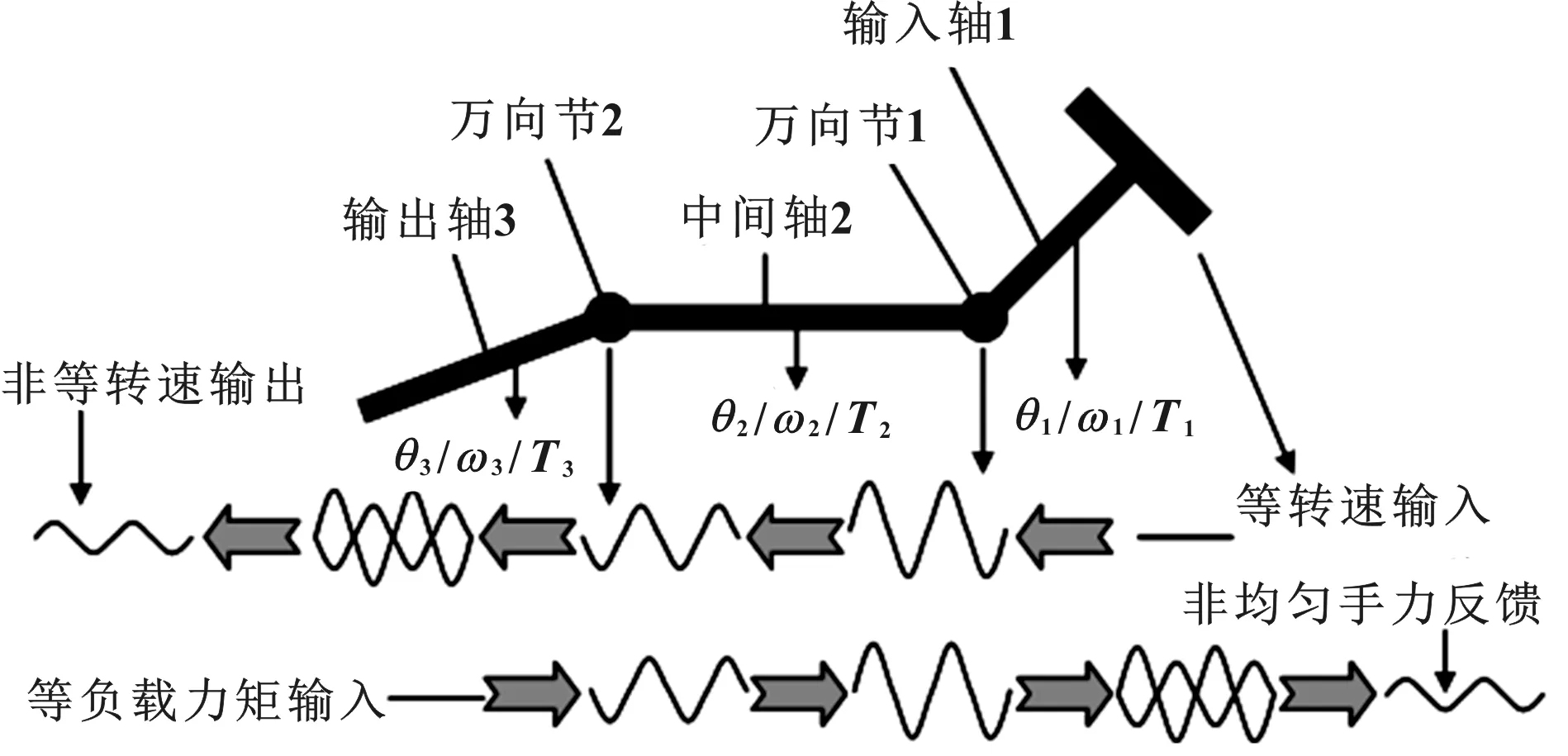
圖7 雙十字軸萬向節(jié)傳動(dòng)的結(jié)構(gòu)組成及傳遞效應(yīng)關(guān)系
為方便計(jì)算分析及描述,設(shè):輸入軸1與中間軸2構(gòu)成交軸平面1-2,其兩軸夾角為,固定在輸入軸1的節(jié)叉平面為,固定在中間軸2的節(jié)叉平面為;中間軸2與輸出軸3構(gòu)成交軸平面2-3,其兩軸夾角為,固定在中間軸2的節(jié)叉平面為,固定在輸出軸3的節(jié)叉平面為;從輸入端向輸出端看,在中間軸2上的節(jié)叉平面相對(duì)于節(jié)叉平面的夾角為相位角,交軸平面1-2與交軸平面2-3夾角為交軸面夾角,它們均以順時(shí)針小于90°為正,逆時(shí)針小于90°為負(fù)。
根據(jù)單十字軸萬向節(jié)傳動(dòng)的相關(guān)分析,可推導(dǎo)出以下帶中間軸雙十字軸萬向節(jié)傳動(dòng)的相關(guān)表達(dá)式。

(8)
=π+arctan(tancos);
(9)
(10)
(11)

(12)
輸入軸到輸出軸的轉(zhuǎn)角關(guān)系由5個(gè)表達(dá)式組成,包括式(8)至式(12)。

(13)
輸入軸到輸出軸的角速度關(guān)系由3個(gè)表達(dá)式組成,包括式(9)、式(10)和式(13)。

(14)
輸出端到輸入端的反饋力矩傳動(dòng)比由3個(gè)表達(dá)式組成,包括:式(9)、式(10)和式(14)。
4 雙十字軸萬向節(jié)傳動(dòng)的特性分析
根據(jù)以上的計(jì)算關(guān)系式,可繪制出相關(guān)的特性曲線圖,對(duì)其傳動(dòng)特性分析如下。
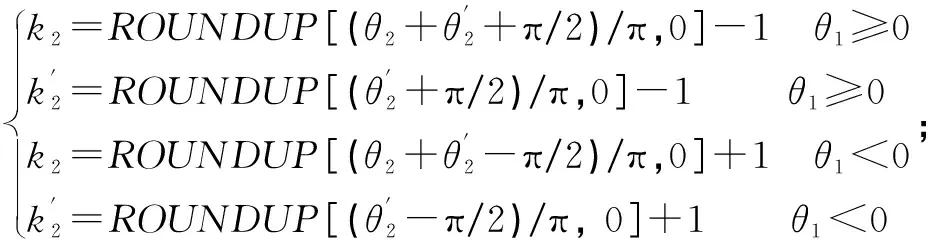
當(dāng)軸夾角=15°、=20°和面夾角=20°時(shí),以不同相位角=20°、=30°、=40°所得輸入軸與輸出軸的角度差||-||、角速度差||-||和反饋力矩傳動(dòng)比13的特性曲線分別如圖8至圖10所示。
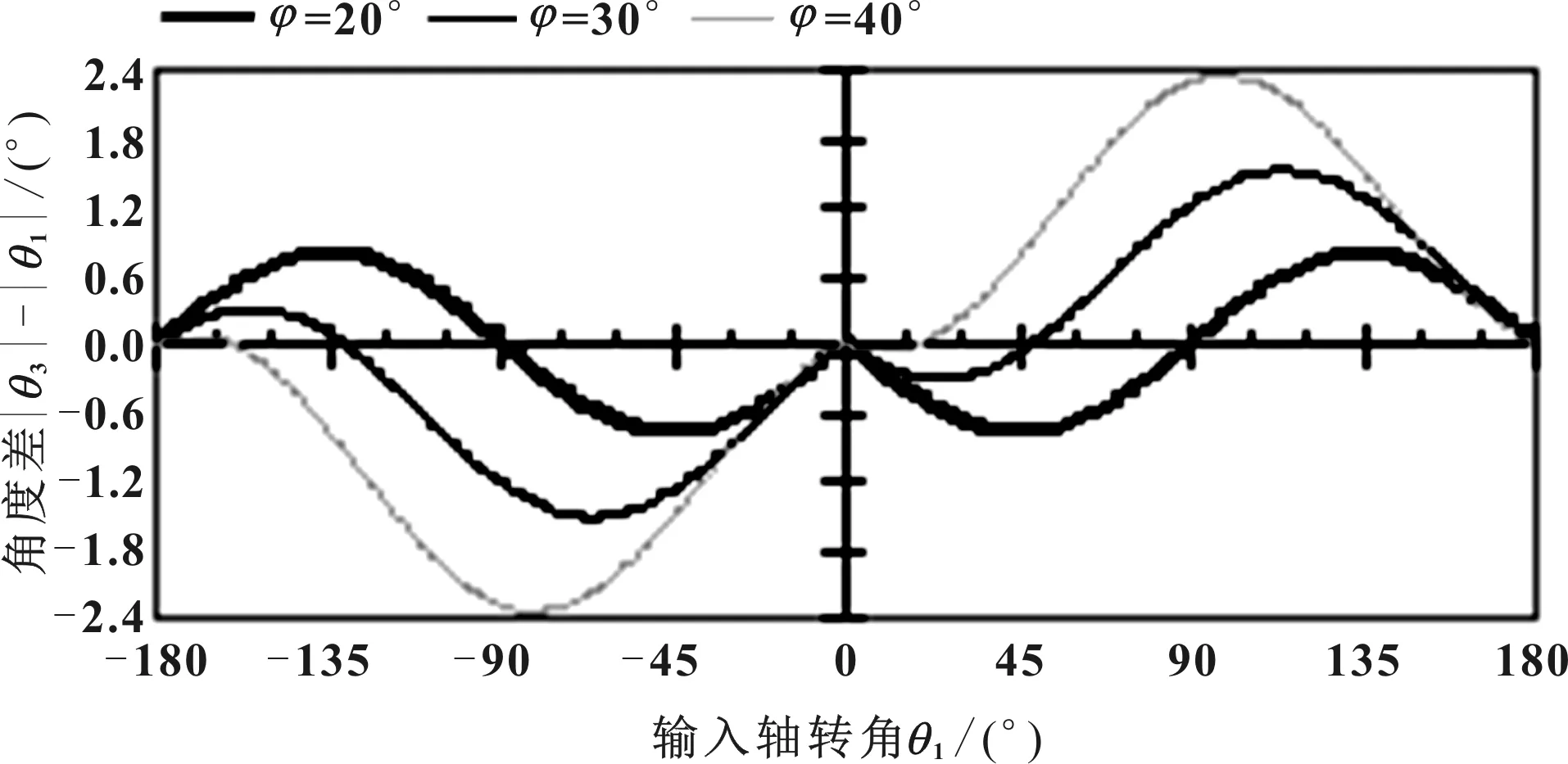
圖8 不同相位角φ時(shí)角度差|θ3|-|θ1|特性曲線
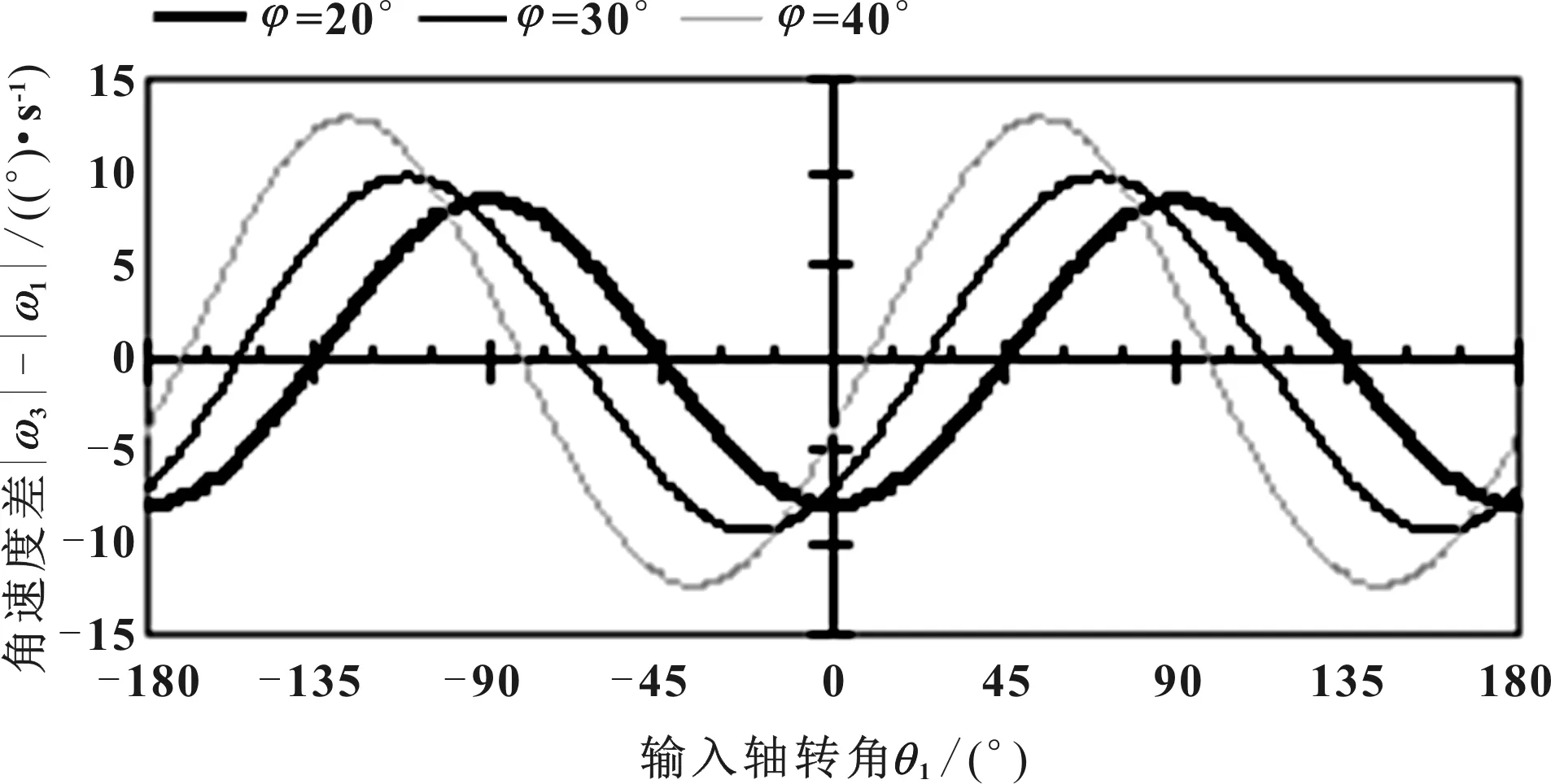
圖9 不同相位角φ時(shí)角速度差|ω3|-|ω1|特性曲線
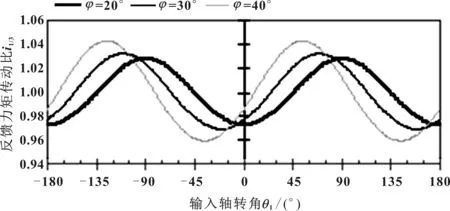
圖10 不同相位角φ時(shí)反饋力矩傳動(dòng)比i1/3特性曲線
當(dāng)相位角=20°、面夾角=20°和軸夾角=10°時(shí),改變軸夾角為=12°、=15°、=18°,所得輸入軸與輸出軸的角度差||-||、角速度差||-||和反饋力矩傳動(dòng)比13的特性曲線分別如圖11至圖13所示。
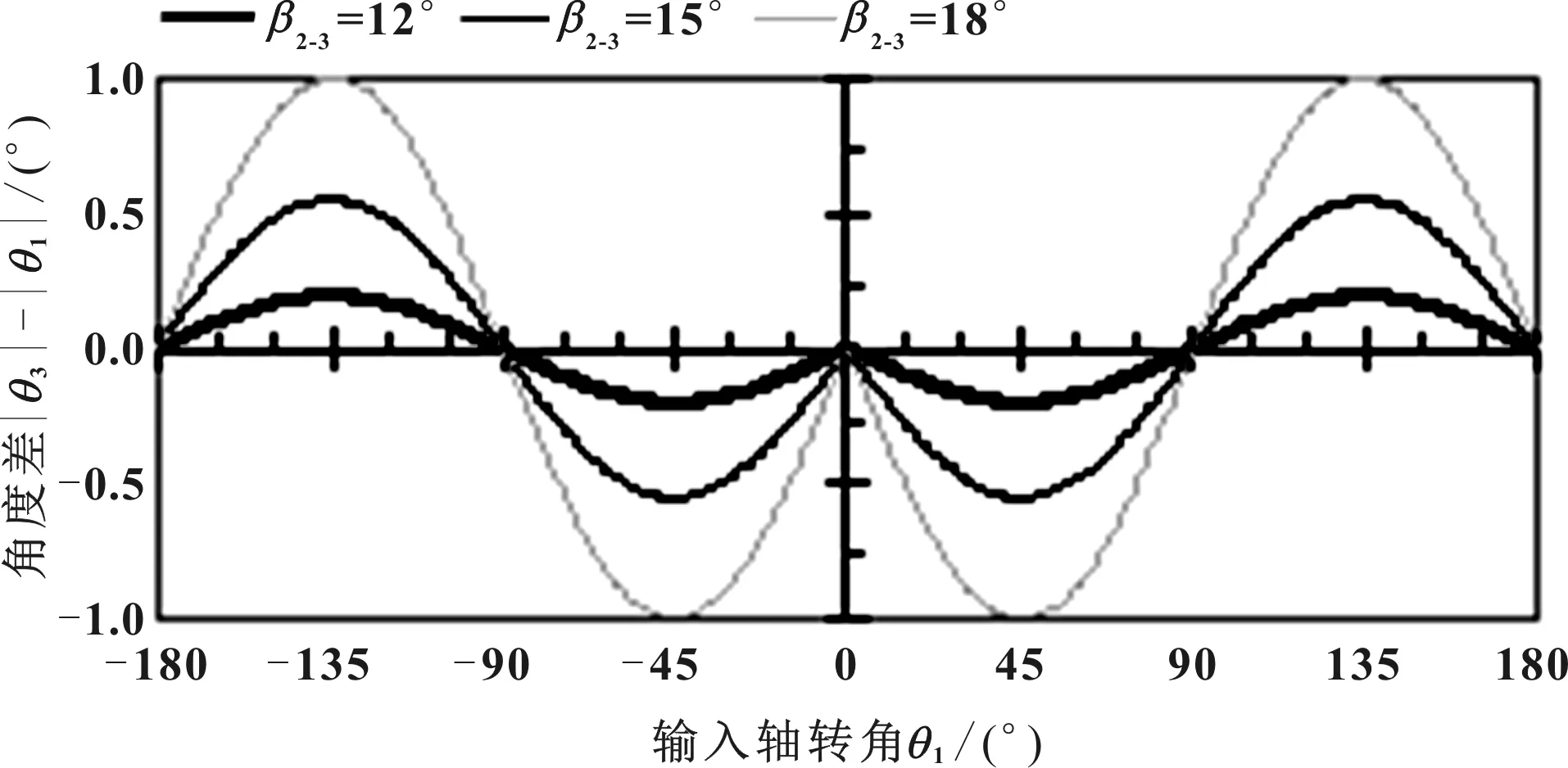
圖11 不同軸夾角β2-3時(shí)角度差|θ3|-|θ1|特性曲線
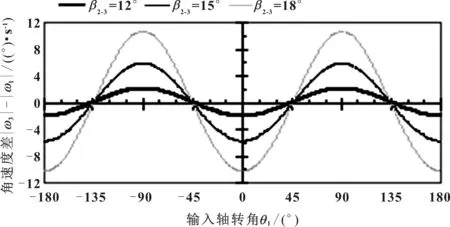
圖12 不同軸夾角β2-3時(shí)角速度差|ω3|-|ω1|特性曲線
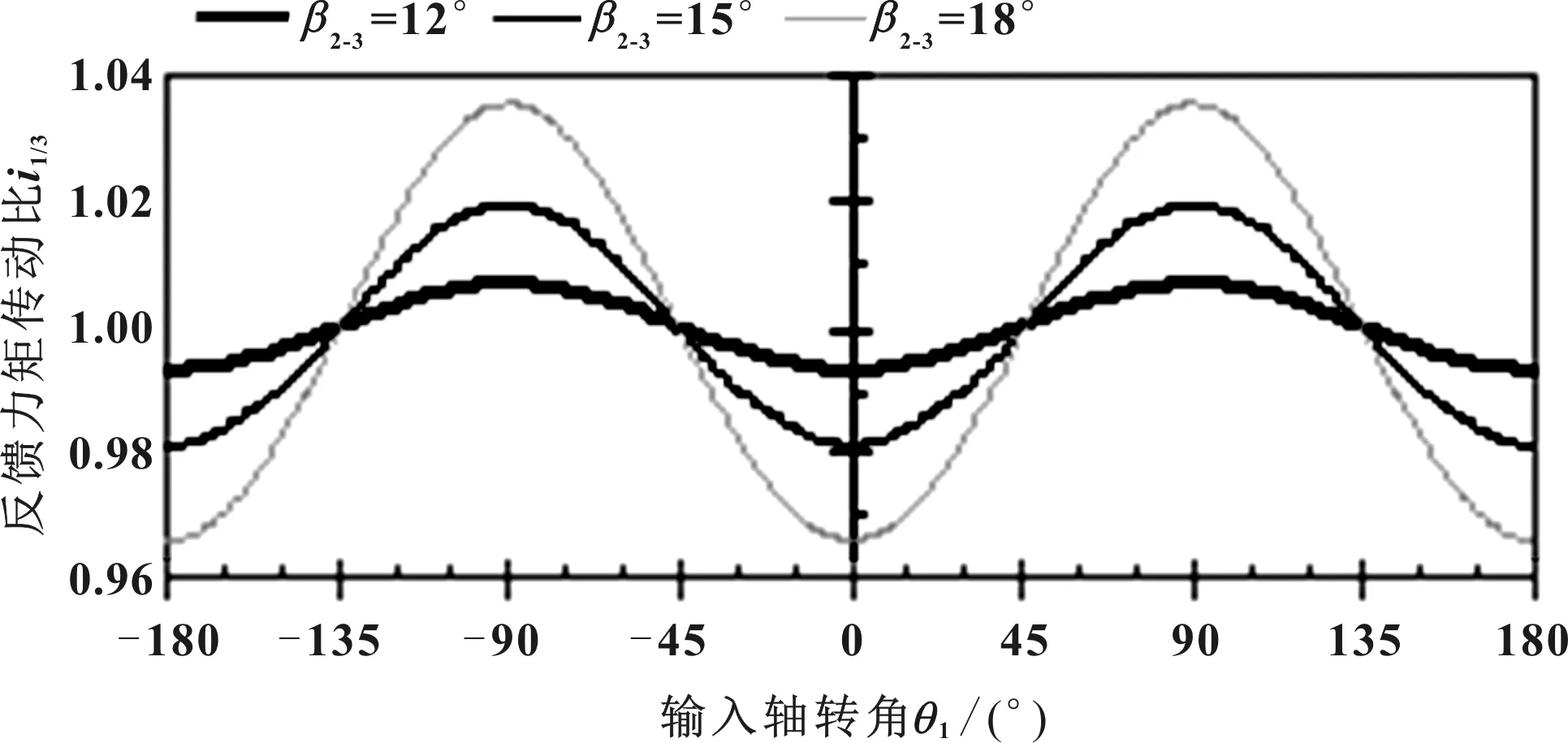
圖13 不同軸夾角β2-3時(shí)反饋力矩傳動(dòng)比i1/3特性曲線
在轉(zhuǎn)向系統(tǒng)中,雙十字軸萬向節(jié)傳動(dòng)特性的相關(guān)聯(lián)參數(shù)包括4個(gè):交軸面夾角、相位角、軸夾角和,它們之間的匹配關(guān)系,將影響轉(zhuǎn)向系統(tǒng)的操縱穩(wěn)定性及手感。
由圖8—10的特性曲線可以看出,交軸面夾角與相位角的匹配,將決定轉(zhuǎn)向系統(tǒng)左右對(duì)稱性,同時(shí)也會(huì)影響角速度及力矩的波動(dòng)程度,該匹配關(guān)系稱為相位匹配;由圖11—13特性的曲線可以看出,軸夾角和的匹配,主要影響了角速度及力矩的波動(dòng)程度,該匹配關(guān)系稱為幅值匹配。這些波動(dòng)過大會(huì)影響駕駛員的手感及路感,影響舒適性及安全性。為了實(shí)現(xiàn)帶中間軸的兩個(gè)萬向節(jié)等速轉(zhuǎn)向傳動(dòng),需要同時(shí)滿足相位的同步匹配和波動(dòng)振幅的等幅匹配。
5 結(jié)論
(1)在轉(zhuǎn)向系統(tǒng)的中間軸上,兩端節(jié)叉平面夾角即相位角等于交軸面夾角時(shí),則兩十字軸萬向節(jié)為同步反向轉(zhuǎn)動(dòng),滿足同步匹配條件,可使左右轉(zhuǎn)向具有對(duì)稱性;當(dāng)軸夾角和相等時(shí),則滿足等幅匹配條件,其轉(zhuǎn)向傳動(dòng)的相關(guān)波動(dòng)振幅最小。
(2)在實(shí)際應(yīng)用中,當(dāng)軸夾角不能實(shí)現(xiàn)等幅匹配條件時(shí),若<,將輸入軸節(jié)叉平面與交軸平面1-2重合位置,設(shè)置為車輛轉(zhuǎn)向的零點(diǎn);若>,將輸入軸節(jié)叉平面與交軸平面1-2垂直位置,設(shè)置為車輛轉(zhuǎn)向的零點(diǎn)。這兩種情況的反饋力矩傳動(dòng)比最小,使轉(zhuǎn)向中間位置具有低靈敏度,可降低高速行駛時(shí)車輛的敏感性,減小駕駛員緊張感。
(3)對(duì)于角度可調(diào)轉(zhuǎn)向機(jī)構(gòu),當(dāng)調(diào)節(jié)角度后,則會(huì)改變軸夾角、及交軸面夾角,使轉(zhuǎn)向特性也隨之改變,但需要在允許的范圍內(nèi),通常變化率在10以內(nèi);同時(shí)會(huì)引起直線行駛時(shí)方向盤不對(duì)中,還需關(guān)注對(duì)駕駛員感觀質(zhì)量的影響。
