T-BOX車載網聯終端設計
2022-03-06 02:43:30吳紀鐸劉愛松趙夢海
汽車零部件 2022年2期
吳紀鐸,劉愛松,趙夢海
(聯創汽車電子有限公司,上海 201206)
0 引言
Telematics BOX(T-BOX)是車輛智能網聯系統中重要的組成部件。T-BOX主要與控制器局域網(controller area network,CAN)總線、車機、車載信息服務提供商(telematics service provider,TSP)進行交互,實現車輛智能網聯的關鍵功能:①與CAN總線交互。T-BOX通過CAN總線采集車輛控制器的報文并進行解析處理,提取出一些車輛的重要信號及參數信息;此外,T-BOX接收到的一些指令可被轉成相應的CAN報文,這些報文通過CAN總線完成對車輛的控制。②與車機進行交互。T-BOX可為車機提供GPS服務、網絡服務等幫助車機實現導航與上網功能。③與TSP進行交互。T-BOX將收集、解析的信號按照規定的傳輸協議組包、加密、壓縮處理等,通過無線傳輸技術發送至TSP端,TSP端可解析車輛的數據并反饋至用戶的手機APP端。另外,TSP端下發的一些車控指令可通過T-BOX轉換成相應的報文完成對車輛的控制,如遠程鎖車、遠程座椅加熱、遠程關閉發動機等。
文中基于瑞薩RH850微控制器、TI CC2640R2F藍牙微控制器、高通MDM9628 4G模組微處理器設計了一款T-BOX車載終端,并對該終端的軟、硬件進行了開發設計。實車試驗驗證表明,該T-BOX終端可準確采集、傳輸車輛信息至TSP,TSP也可通過下發遠程指令至T-BOX終端對車輛進行有效、可靠控制。
1 T-BOX終端整體設計
文中設計的T-BOX車載終端主要包含MCU模塊、MPU模塊及藍牙模塊3個模塊,T-BOX終端總體設計如圖1所示。

圖1 T-BOX終端總體設計
T-BOX車載終端MCU模塊通過CAN總線技術與車輛建立通信,MCU CAN模塊連接車輛的總線,將車輛控制器中的CAN報文采集至MCU,MCU再將收集到的車輛控制器報文解析、組包,通過UART(universal asynchronous receiver/transmitter)分發至MPU模塊。MPU模塊主要完成GPS定位、無線通信等功能,將采集到的GPS信息與MCU發送的車輛信息按協議組包后,利用數據編碼、數據加密、數據壓縮等技術通過LTE無線通信發送至TSP,TSP平臺將收集到的車輛信息進行解密、解析后發送至用戶的手機APP。MPU模塊同樣可以提供語音服務,當車輛發生故障時可以通過語音服務聯系道路救援機構申請道路救援等。當用戶想主動查詢車輛狀態以及實施遠程車輛控制時,可以通過手機APP發送指令至TSP,TSP將指令按空中協議組包后發送至T-BOX終端,T-BOX的MPU模塊解析指令并將指令通過UART發送至MCU模塊,MCU模塊最終將指令轉成相應的CAN報文與車輛完成交互。T-BOX的藍牙模塊也可通過藍牙無線通信技術與用戶手機APP進行交互,可完成藍牙鑰匙管理、藍牙設備鑒權、藍牙車輛控制等功能。
2 T-BOX終端硬件設計
2.1 MCU硬件設計
MCU模塊以瑞薩公司的RH850芯片作為核心芯片,該芯片具有功耗低、兼容性高等優勢。RH850芯片集成了豐富的片上資源,Code Flash容量達到1 M,Data Flash容量達到32 kB,RAM達到128 kB,最高可配置6路CAN控制器;此外,包含13個外部中斷,2路看門狗定時器等。T-BOX MCU模塊硬件設計如圖2所示。

圖2 T-BOX MCU模塊硬件設計
外部開關信號輸入包含4路,分別代表icall信號、ecall信號、點火信號以及靜音信號。其中,icall信號、ecall信號為低電平有效;點火信號為高電平有效。當車輛的點火鑰匙旋入到ON時,點火開關閉合,輸入高電平。
模擬/數字信號輸入有15路,主要包含1路40 PIN連接器輸入、2路充電電源輸入、5路音頻檢測輸入、3路MPU模塊輸入以及4路天線檢測輸入。
充電電池控制接口主要控制T-BOX電池的充電開、關,在車輛發動機啟動時開始對電池充電,當電池溫度過高(高于60 ℃)或者溫度過低(低于-10 ℃)時停止對電池充電。
看門狗模塊主要包括看門狗使能信號配置、喂狗信號配置、供電使能信號配置以及MCU復位信號配置。其中,看門狗使能信號為低電平有效;正常工作時,喂狗信號脈沖最小值為0.06 ms,看門狗使能后800 ms內需有脈沖信號,之后需在50~100 ms內有脈沖信號;供電使能信號在高電平時給看門狗進行供電;MCU復位信號在低電平時有效。
MCU通過I2C接口與三軸加速度傳感器SMA131相連,傳感器向MCU輸入時鐘信號、數據信號以及中斷信號。
MCU共包含3路CAN收發,CAN收發器選擇型號為TLE7251VSJ。
MCU通過GPIO口控制SKYA21003射頻開關的切換,SKYA21003可以對T-BOX的內置天線和外置天線進行切換。
MCU通過GPIO口控制三極管開關來檢測電路的使能,當需要檢測時打開使能,不需要時關閉使能,以減小功耗。T-BOX進入低功耗模式時,需要關閉USB檢測使能、BOOST使能、電平轉換供電、電池充電電源、GPS天線供電。
2.2 MPU硬件設計
MPU模塊以高通MDM9628芯片為核心,該模塊支持LTE/WCDMA/TD-SCDMA/CDMA/GSM/CDMA多個頻段無線通信,還可提供GNSS(Global Navigation Satellite System)服務以及語音通話功能。MPU模塊存儲資源與接口資源豐富,擁有256 M的RAM以及512 M的ROM;包含1路USB接口、3路UART接口、1路Audio接口、1路I2C接口等。T-BOX MPU模塊硬件設計如圖3所示。

圖3 T-BOX MPU模塊硬件設計
MPU模塊采用UART接口與MCU連接,進行MCU與MPU的數據通信;通過WPI/WPO GPIO去支持整個T-BOX休眠與喚醒操作。
SIM卡接口支持移動、聯通、電信運營商esim卡貼片,接口電路主要包括復位信號、數據信號、時鐘信號。
USB接口設計主要包含USB差分信號以及USB接口芯片電源控制。其中通過高電平打開USB接口芯片電源,通過低電平關閉USB接口芯片電源。
MPU模塊支持內置音頻CODEC,輸出音頻通過Audio PA放大。音頻輸入、輸出接口主要包含I2C時鐘信號、I2C數據信號、PCM時鐘、PCM數據輸入輸出等。
MPU模塊天線接口主要包括主集天線、分集天線以及GNSS天線。
2.3 藍牙硬件設計
藍牙模塊采用的是TI公司的CC2640R2F低功耗藍牙微控制器芯片。該芯片的時鐘頻率可達到48 MHz,具有275 kB的非易失性存儲器以及28 kB的RAM。藍牙模塊通過UART與MCU建立通信,T-BOX BLE硬件設計如圖4所示。

圖4 T-BOX BLE硬件設計
藍牙模塊通過UART與MCU進行消息的交互,MCU通過GIPO控制藍牙模塊的復位、休眠與喚醒。
T-BOX終端硬件實物設計如圖5所示。
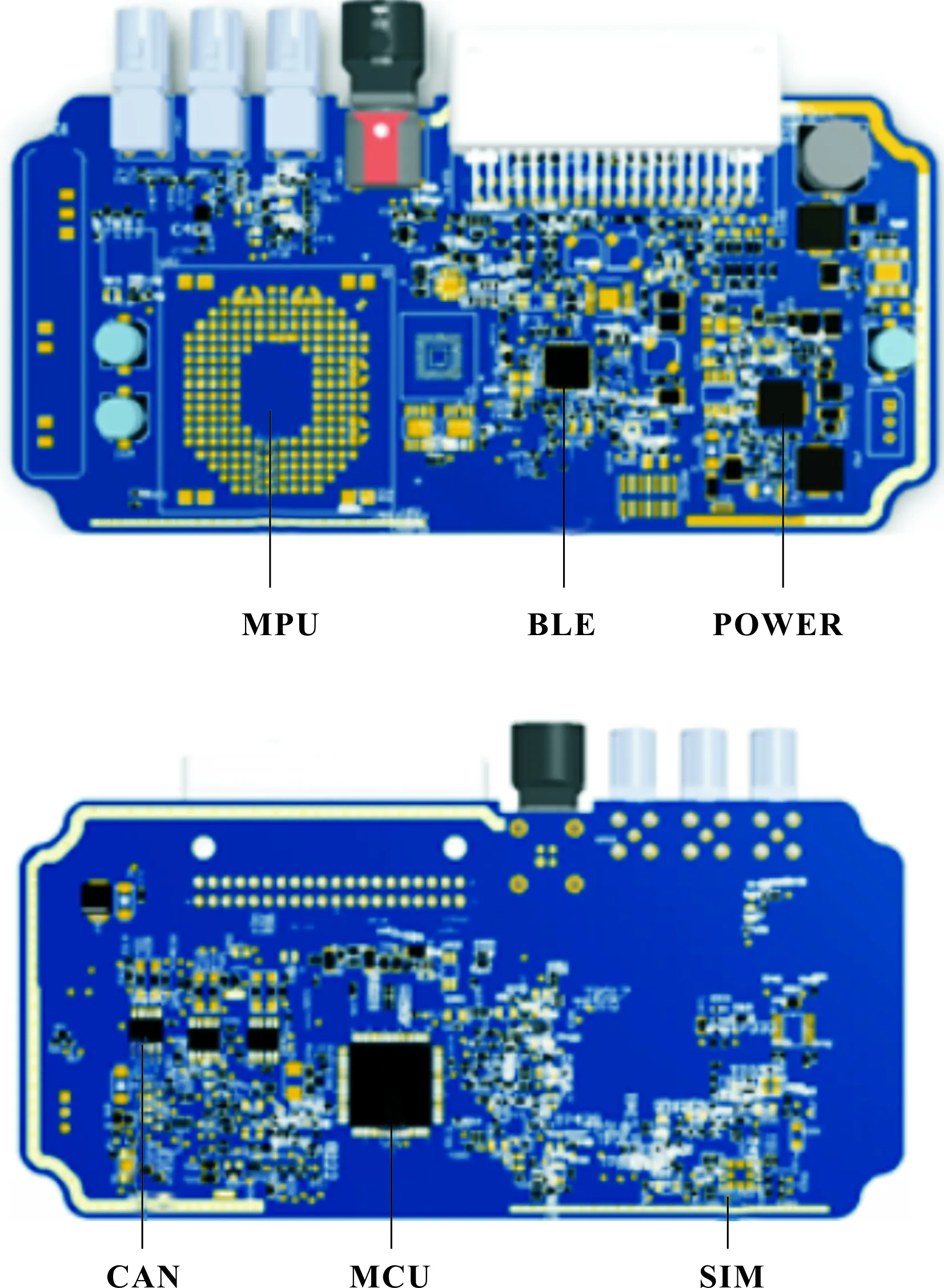
圖5 T-BOX 終端硬件實物設計
3 T-BOX終端軟件設計
3.1 MCU軟件設計
如圖6所示,MCU軟件架構設計由下至上分為5層,分別為Bootloader層、Rtos和HardwareDriver層、Rte層、API/Callback Interface層及APP層。

圖6 T-BOX MCU軟件設計
Rte層為基礎服務層,并為APP層提供API。Rte層和APP層中主要模塊功能如下:
(1)OsSysInit:負責MCU系統初始化。
(2)SysMgrSrv:軟件監控服務模塊,主要負責監控MCU各模塊軟件是否正常運行。
(3)APPMgrSrv:APP Task管理服務模塊。
(4)BleSrv:低功耗藍牙服務模塊。
(5)Auxiliary:輔助服務模塊,如軟件版本信息的管理等。
(6)GsenSrv:Gsensor管理服務模塊,主要完成三軸加速度信號的采集與處理。
(7)WanSrv:網絡無線通信管理服務模塊,接收與管理MPU網絡模塊同步的一些網絡狀態及參數配置信息。
(8)DcpdSrv:MCU與MPU 之間的通信服務模塊,主要負責MCU模塊通信協議消息的紛發與處理。
(9)NVRAMSrv:Dflash管理服務模塊。
(10)COM:網絡通信相關功能處理模塊,如網絡報文的配置、收發、解析等。
(11)DIAG:診斷功能處理模塊,包含故障碼診斷、數據讀取服務等。
(12)VCP:遠程車控功能的服務模塊。
(13)PM:電源管理模塊,負責整個T-BOX的電源開關以及MPU模塊、藍牙模塊進入低功耗模式等。
(14)ICT:車輛狀態、大數據、BCALL功能的服務模塊,主要負責車輛信號的收集與組包等。
(15)AC:激活配置功能的服務模塊,主要包括T-BOX配置參數的獲取、紛發以及激活T-BOX流程的發起。
(16)BTC:藍牙車控功能處理模塊,負責藍牙車控消息的接收與轉發等。
(17)RC:遠程車控功能處理模塊,接收MPU模塊以及藍牙模塊的車控消息并進行解析。
3.2 MPU軟件設計
如圖7所示,MPU軟件架構由下至上同樣分為5層,分別為Linux Os層、Driver層、Service層、API/Callback Interface層以及APP層。

圖7 T-BOX MPU軟件設計
MPU Service層和APP層中主要模塊功能如下:
(1)Security:提供Openssl等加密算法,負責通信報文的加密服務等。
(2)LogMgrSrv:管理日志文件打印、存儲,控制日志文件大小。
(3)GnssSrv:提供GPS相關服務。
(4)AdbDemon:ADB守護進程,支持ADB調試功能。
(5)DcpdSrv:實現與MCU之間的數據通信,在MPU側實現消息的接收與轉發。
(6)SpmSrv:MPU模塊的電源管理,接收MCU模塊發送的開機、關機、休眠指令等。
(7)WanSrv:提供網絡相關服務,如撥號、網絡狀態獲取、語音、短信服務等功能。
(8)SysMgrSrv:系統管理進程,負責啟動其他進程以及其他進程的監控,僵尸進程的重啟等。
(9)API/Callback:封裝SDK各個Service功能,為APP層提供統一的標準調用接口。
(10)AvnSrv:實現與車機的交互,為車機提供上網服務與定位服務等。
(11)OtaSrv:建立與TSP后臺的通信,對接其他APP與TSP后臺的交互。
(12)BigdataAPP:實現大數據功能,將車輛的數據收集、打包、壓縮、加密統一發送至TSP。
(13)AuxSrv:與Mcu Auxiliary模塊交互,進行版本信息等輔助功能管理。
(14)FotaAPP:負責遠程刷新升級包下載、解析以及升級策略判斷、遠程診斷功能。
(15)FotaEAPP:升級引擎,執行刷新動作。
(16)RvmAPP:實現車輛遠程狀態監控和遠程行程記錄。
(17)AcAPP:負責接收Mcu Ac模塊的配置信息并執行遠程配置業務。
(18)bCallAPP:車輛發生故障時,提供電話服務申請遠程救援等。
3.3 藍牙軟件設計
藍牙軟件模塊由下到上主要包括Bootloader層、TI-Rtos/Hardware Driver層、BLE STACK層、ICALL層與APP層,如圖8所示。

圖8 T-BOX 藍牙模塊軟件設計
主要模塊功能如下:
(1)COM:APP層的通信模塊,負責與MCU模塊的通信。
(2)PM:APP層的電源模式管理模塊,負責藍牙模塊的開機、關機以及進入低功耗模式。
(3)ICALL:APP層與藍牙協議棧的標準接口。
(4)BLE STACK:藍牙協議棧層。
4 試驗驗證與分析
為驗證所設計的T-BOX終端的功能與可靠性,將T-BOX終端裝上某款車型實車進行了試驗驗證。如圖9所示,所設計的T-BOX終端安裝在車輛的手套箱位置,通過40 PIN線束與實車相連。

圖9 T-BOX與實車相連接
將試驗車輛與該車型的用戶手機APP進行綁定,并完成T-BOX的配置激活操作,這樣可在APP端下發指令至車輛的T-BOX進行車輛的遠程操作。試驗驗證的內容主要包括遠程車輛狀態查詢與遠程車控指令下發。
4.1 遠程車輛狀態查詢試驗驗證
在手機APP端下發車輛狀態查詢指令,T-BOX收到遠程查詢指令后,將車輛的狀態信息發送至TSP,TSP端再將車輛的狀態信息同步至用戶的手機APP。
如圖10所示,實車中控顯示屏與手機APP端顯示的車輛可續航里程均為313 km,實車中控屏與手機APP端顯示的車輛四門狀態、引擎蓋狀態信息一致,說明T-BOX終端能夠正確接收、解析手機APP端的車輛查詢指令,并將車輛的狀態信息準確反饋至手機APP。

圖10 T-BOX車輛狀態查詢試驗驗證
4.2 遠程車控試驗驗證
在手機APP端執行遠程開啟車輛空調、遠程主副駕駛座椅加熱指令,T-BOX端接收、解析車控指令并轉成相應的CAN報文對車輛進行控制。
如圖11所示,T-BOX成功執行車控指令后,將車控指令的執行情況反饋至手機APP端,在APP端顯示出車輛空調已為開啟狀態,主、副駕駛座椅為加熱狀態。

圖11 T-BOX遠程車控試驗驗證
5 結論
文中以瑞薩RH850芯片、高通MDM9628芯片、TI CC2640R2F芯片為核心設計了一款T-BOX車載終端,該T-BOX終端總體上分為MCU模塊、MPU模塊以及藍牙模塊。針對各模塊進行了硬件設計與軟件開發,并將T-BOX終端接入實車進行功能驗證。試驗驗證表明,設計的T-BOX終端能夠有效、可靠地與車輛及TSP進行交互,能夠準確接收、解析TSP端的指令并將車輛的信息按照傳輸協議準確發送至TSP。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
中華詩詞(2022年6期)2022-12-31 06:41:24
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電子制作(2018年11期)2018-08-04 03:25:42
中國科技論壇(2017年7期)2017-07-25 08:49:53
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
