一種監測集魚一體化仿生機器魚設計
2022-03-03 02:07:10吳清云謝辰旻林志豪張新月毋鑫鵬
水產養殖 2022年1期
關鍵詞:水質
吳清云,謝辰旻,林志豪,張新月,毋鑫鵬
(1.上海海洋大學工程學院,上海 201306;2.上海海洋大學海洋文化與法律學院,上海 201306;3.上海海洋大學信息學院,上海 201306;4.上海海洋大學經濟管理學院,上海 201306;5.上海海洋大學海洋科學學院,上海 201306)
我國是水產養殖大國,養殖產量位居世界第一。仿生機器魚的投入使用將為水產養殖行業帶來新的血液與運作監管模式。相較于傳統水產養殖行業,其具有高度機械化、自動化的特點,符合新時代水產養殖行業的發展需求。
在水產養殖領域中,研究者除了聚焦水下機器人的制作、養殖水質的監測;還通過搭載攝像頭、傳感器等設備,監控魚群狀態、水溫、pH值和溶氧量,不斷發展的設備為水下環境的觀測與水環境監測提供了方便。國內外許多研究表明,當前水質監測行業中存在設備功能單一的問題,如Karimanzira等為水下機器人裝備了導電率、溶解氧傳感器,實現了大范圍水質監測與水下巡航,但無法與魚群狀態進行匹配;張金泉等設計了一種搭載了視頻監控系統的框架式無纜水下機器人,但框架式的設計缺乏靈活性,同時會驚擾魚群。總體缺乏能夠不驚擾魚群的水質監測設備與魚群視覺監測裝置來科學化地監測水產養殖情況。
現設計的仿生機器魚基于多傳感器技術和自主巡航技術,能夠實現魚群視覺監測和水質數據采集,將采集到的數據與當前魚群生長狀態相匹配,進行多維度監測。該機器魚創新性地將水質監測和視覺監測融為一體,具有一定的先進性。
1 系統架構及工作原理
現設計的仿生機器魚,是將LED集魚燈與仿生魚特性相結合的水質監測與水下魚群觀測設備。產品仿生了鲹科魚類,胸鰭由左右兩舵機驅動,魚體部分與魚尾由三彈簧進行連接,彈簧的壓縮伸長由單獨驅動單元控制以實現方向改變,渲染圖見圖1。裝置底部設有2個綠色LED集魚燈,而攝像頭位于魚頭處,分布在魚頭兩側,能夠獲得最大范圍視野,減少水下航行的盲區。頭部設有入水式水質監測傳感器,流水由腮處開孔流出。魚體內部則采用模塊化設計,彼此相隔,以方便模塊故障的排查等。
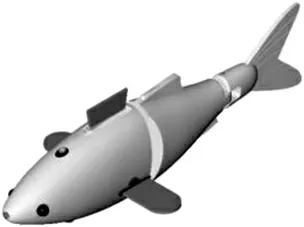
圖1 仿生機器魚
1.1 系統架構
仿生機器魚通過模塊化的設計,搭載了水質監測模塊、魚群探測模塊及自主巡航模塊等,實現了自動控制,滿足了水質監測、集魚等不同功能的需求。遠程數據監控界面負責對仿生機器魚獲得的動態參數進行接收、評估和顯示,見圖2。
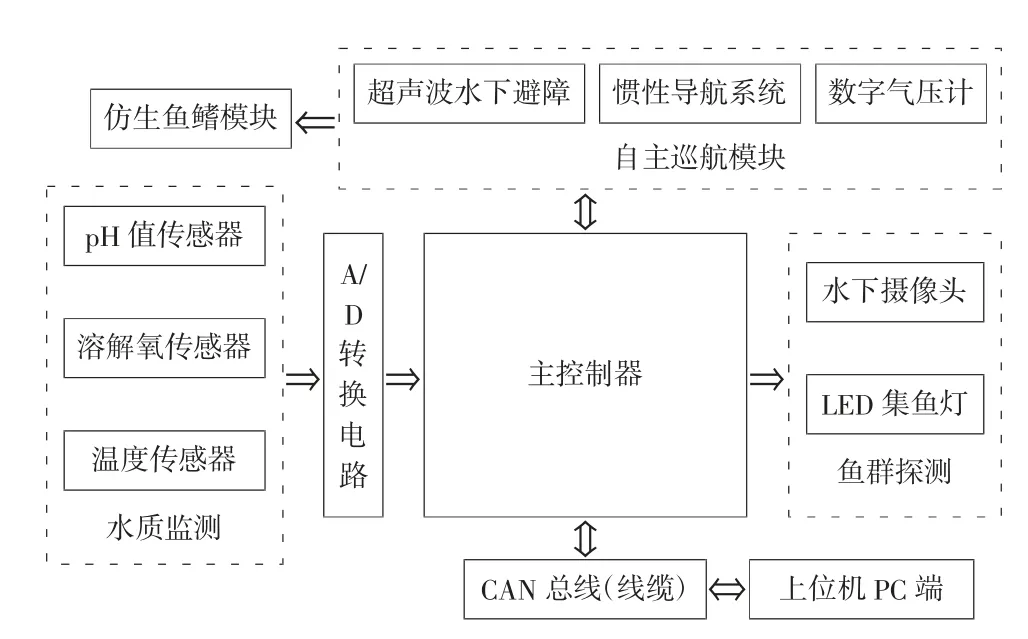
圖2 水下機器人結構
1.2 工作原理
仿生機器魚在裝置啟動前,須通過程序預設巡航深度、速度和終點,將其置于水中時即可啟動工作模式。搭載的定位導航模塊、深度模塊與避障模塊,通過預設程序指引航行方向、深度與速度,防生機器魚啟動后將自動、安全地向航線終點前進。定位導航模塊將通過對定位信息與相對位置信息的判斷,自動調整左右舵機輸出,身尾三彈簧的形態分別調整胸鰭與尾的擺動,從而控制裝置水下航行的姿態。仿生機器魚同時搭載了多種傳感器,以準確獲得水質相關信息(pH值、溫度、溶氧量等),進行初步評估后同步在上位機顯示實時數據與評估結果。同時底部集魚燈將配合攝像模塊完成誘集魚群與拍攝的任務,通過ROV線纜與無線通信技術,將數據與畫面傳輸至上位機平臺進行展示。
2 控制系統
仿生機器魚以單片機為基礎,其硬件設計分為主控制器、避障模塊、定位導航模塊,輔以相應的編程語言和傳感器分別進行數據采集。
2.1 硬件部分
仿生機器魚的控制系統主要基于Arduino UNO搭建而成,將Arduino UNO作為主控裝置,同時配置了定位導航模塊、深度模塊與避障模塊、動力源模塊、傳感器模塊、攝像模塊與LED集魚燈模塊。定位導航模塊能夠在保證較高精度的前提下使裝置按照預設路徑進行巡航;深度模塊能夠實時連接上位機同步上傳裝置所處深度;自動避障模塊能夠確定水下航行器前進路線是否存在障礙并自動避開障礙安全航行;傳感器模塊將對周圍水環境進行簡單測定,同步上傳上位機,并在內置參數判斷程序的提醒下,在水質不符合養殖標準時警告上位機系統;攝像模塊分布在魚頭兩側,分別獲得接近180°視野,組合后可以使水下航行視野盲區趨向最小;集魚燈系統在魚體下方安置2個,在魚體上方安置1個,在航行中實現誘魚集魚功能。
2.1.1 定位導航模塊
仿生機器魚工作過程中的一大難點在于水下自主航位推算。運用捷聯式慣性導航技術(INS)在水下進行定位和導航。捷聯式定位導航較平臺式INS占據的體積與空間小,且更容易將導航與控制集成于一體,通過加速度對時間的二次積分即可得到航行器位置。由于衛星信號無法穿透水體傳遞至仿生機器魚,因此須通過線纜與仿生機器魚進行連接,上位機也可通過CAN總線接收到仿生機器魚的姿態、速度和位置等信息并顯示出來。定位導航模塊構成見圖3。
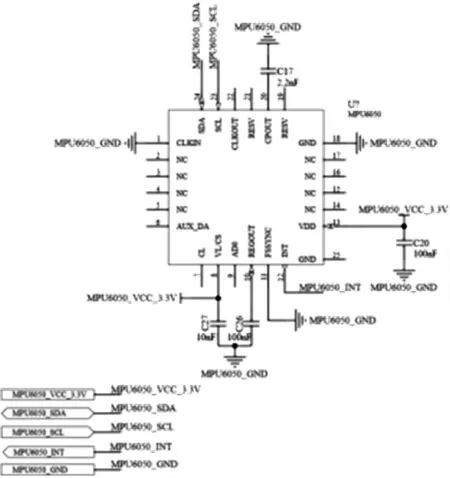
圖3 慣性導航模塊硬件電路
2.1.2 LED集魚燈的選取
傳統集魚燈主要為金鹵燈,具有光線相對發散、能耗高、發熱量大的缺點,而LED集魚燈相較傳統集魚燈具有能耗低、指向性強、穿透性強的特點。赤點石斑魚廣泛分布于我國東南沿海,具有極高的經濟價值,對綠色燈光(波長峰值分布于514 nm)興趣較強。為確定后續使用的LED集魚燈是否達標,對某綠色LED集魚燈的光譜分布進行了測定,得到光譜分布曲線,見圖4。燈光亮度為1 500 lm,色溫為7 843 K,光譜范圍主要集中在490~540 nm,峰值波長為524.6 nm,其光通量Φ=315.5 lm,光效為52.57 lm/W,輻射通量Φ為676.23 mW。經驗證,符合理論使用標準。

圖4 光譜分布
2.2 軟件部分
軟件部分主要包含CAN總線、串口通信、I/O接口控制、數據采集與處理、位置獲取、深度控制和航行控制等。此仿生機器魚的控制系統采取分布式控制,包含上位機平臺和下位機兩部分。GPS衛星定位模塊采用串口通信方式接收當前位置參數并與設定的重點位置參數進行比對分析,傳感器設定的程序可采集相應水質參數通過A/D轉換傳輸給主控制器,主控制器接D/A模塊與螺旋槳相連,控制螺旋槳轉速與轉動方向。采用INS捷聯式慣性導航對仿生機器魚定位導航需要進行解算,包括以下3個步驟。
(1)陀螺儀輸出角度矩陣W,通過該矩陣得到仿生機器魚姿態矩陣,在姿態矩陣基礎上進行姿態解算得到姿態角;
(2)通過姿態矩陣將加速度計輸出的f矩陣轉換到導航坐標系中換算為速度信息f,即速度解算;
(3)對速度信息進行積分得到位置信息并更新顯示,即位置解算。
通過上述流程得到的信息即為實時位置信息,導航定位解算思路具體見圖5。
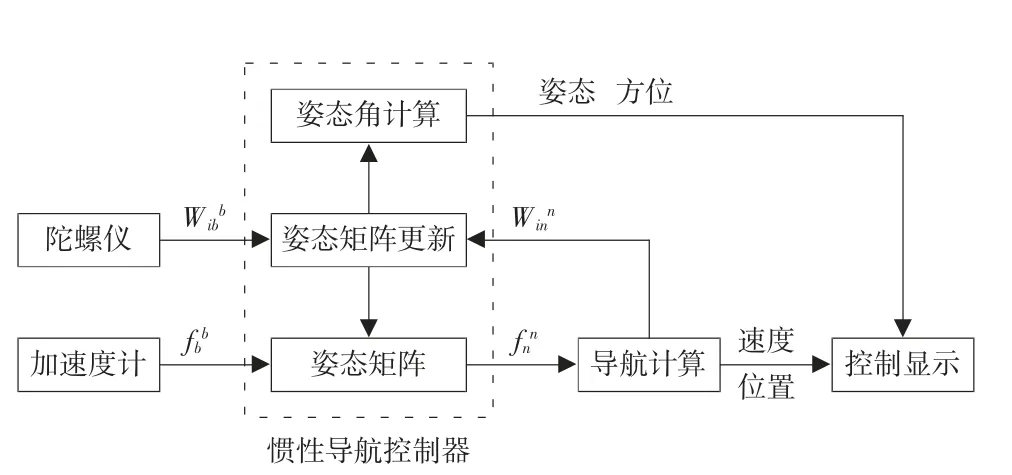
圖5 捷聯式慣性導航解算實現思路
3 試驗
3.1 運動仿真
根據經驗在捷聯慣性導航誤差仿真時選定合適參數:
(1)陀螺儀的噪聲漂移擬定為0.01(°)/h;
(2)陀螺儀隨機常值漂移擬定為0.1(°)/h;
(3)考慮一階Markov過程,引入一階Markov模型,陀螺儀一階Markov飄移值擬定為0.1(°)/h;
(4)加速度計一階Markov漂移擬定為1×10;
(5)一階Markov過程用于描述低頻隨機誤差特性,其離散表達式如式(1)所示。

式中:()為馬爾科夫過程序列;T為相關時間,s,用以表征誤差傳遞;△為單次采樣時間間隔,s;w()為驅動白噪聲,dB。T值較大時,Markov過程呈現類似角頻率隨機游走的低頻特性,其取值通常在1 800 s至7 200 s。為進一步體現導航控制器性能,結合陀螺儀的低頻隨機角頻率特性,故選取相關時間T=7 200 s。
仿真后得到的誤差隨時間變化函數見圖6。由圖6可見,在仿生機器魚持續運動、慣性導航持續工作時間較短時其定位精度較高,誤差被限制在0.5以內;誤差隨時間逐步累積,整體誤差呈二次函數形式上升。由此得出水下機器人在工作過程中為保證其定位精度,持續運動時間需<700 s。
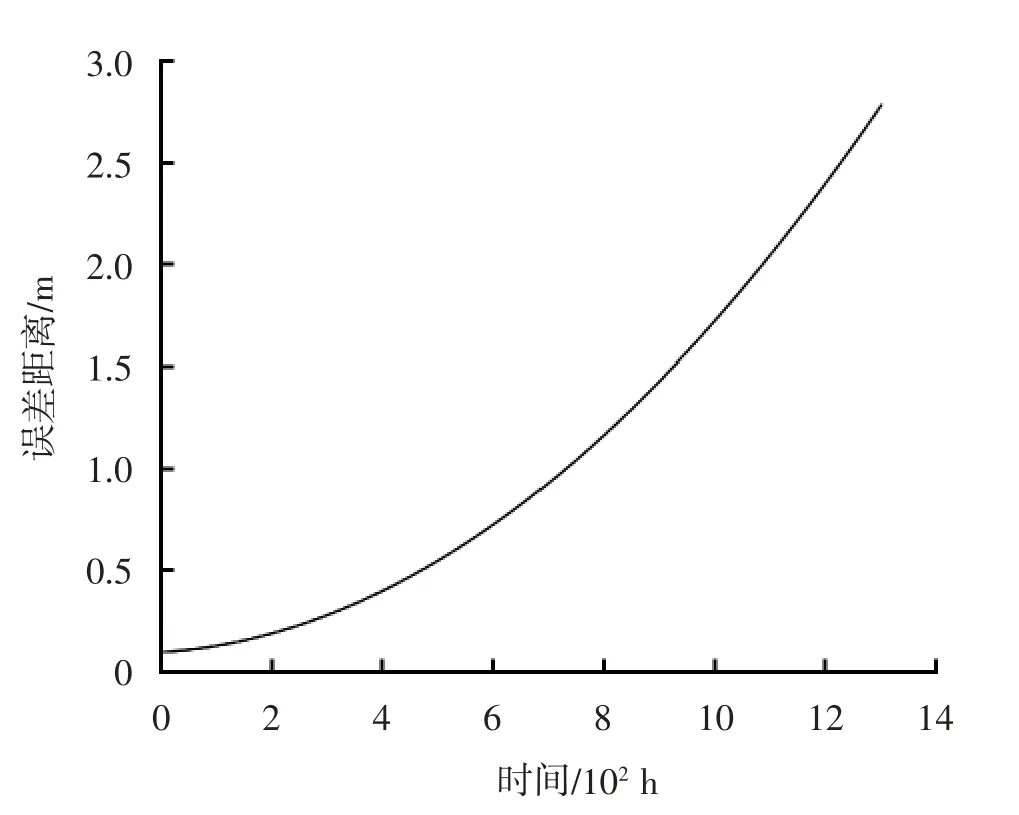
圖6 捷聯式慣性導航誤差仿真
若要進一步提高仿生機器魚的導航定位精度,可通過以下2種途徑實現;一是修改軟件定時,讓仿生機器魚上浮至水面附近,加裝GPS,使之與捷聯式慣性導航融合,以這樣的方式校正定位;二是在仿生機器魚定位導航系統中融入其余定位方式,結合Kalman濾波算法可減小對應誤差。僅依靠單一導航方式無法實現持續工作狀態下的精準定位。
3.2 水質數據采集實驗
為測試仿生機器魚能否在漁業養殖環境中完成水質監測,將仿生機器魚置于校園湖泊內進行水下航行及水質相關參數采集試驗。測量參數為pH值、溫度與溶氧量,測試時間為23:00至次日01:00,天氣為陰雨天,采用有纜通信的方式回傳數據。預設深度值為0 m(水面)、0.5 m(靜水層)和1.0 m(接近水底),水域溫度、p H值及溶解氧監測數據見表1。表1為采樣點不同深度的水質監測數值,由于在不同環境下傳感器的溫度補償存在差異,造成6個樣品小范圍內的試驗誤差。
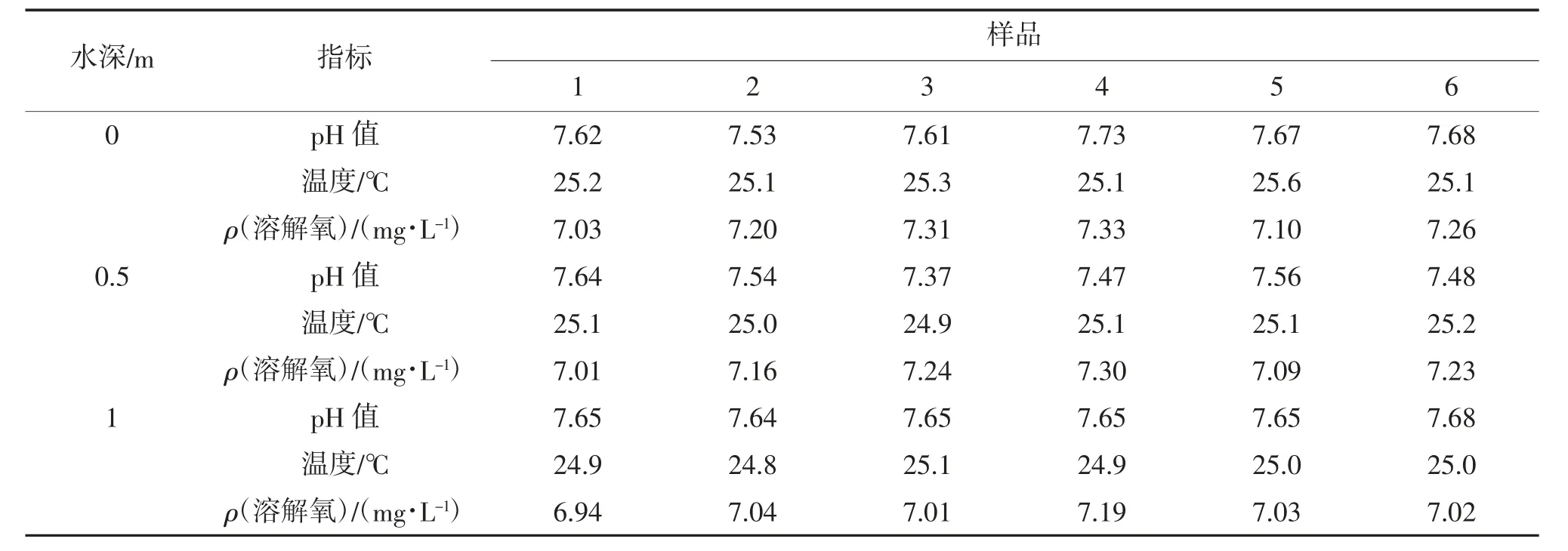
表1 水質監測數據
3.3 集魚范圍試驗
試驗所用LED集魚燈(燈光亮度1 500 lm,色溫7 843 K),在室溫(24±0.1)℃、水溫(20±0.1)℃、濕度25.2%、全黑吸光的環境下進行試驗。測量所用特安斯牌數字照度計測量范圍0~200 000 lx,準確度為±4%(讀數誤差),±10(數位分辯率)(<10 000 lx),厚度為(3.00±0.03)cm。
為確定該LED集魚燈的水下誘魚集魚能力,設置測試環境為長300 cm、寬150 cm、高200 cm的鋼化玻璃水缸,鋼化玻璃厚度為2 cm,其中水深為100 cm。基于光譜輻射量試驗,通過光在不同介質(空氣、玻璃、去離子水)的輻射量,對比光照度衰減系數,可以測試出集魚效果最佳的集魚燈具。經試驗測量以及數據擬合,該LED集魚燈在水中的光衰減反映的照射距離()與照度()的關系為:=4 967.7。由于LED燈在水中形成的等光照度曲面接近于球體,因此可用球體體積的計算公式來估算誘集范圍,計算結果見表2。

表2 集魚燈誘集范圍
由表2可知,LED綠光激光集魚燈1x等光照度曲面所含包的水體積為2 447 m,最遠照射距離為18.7 m,基本能夠滿足使用目的。使用Origin 2019 b軟件繪制等值曲線,見圖7。
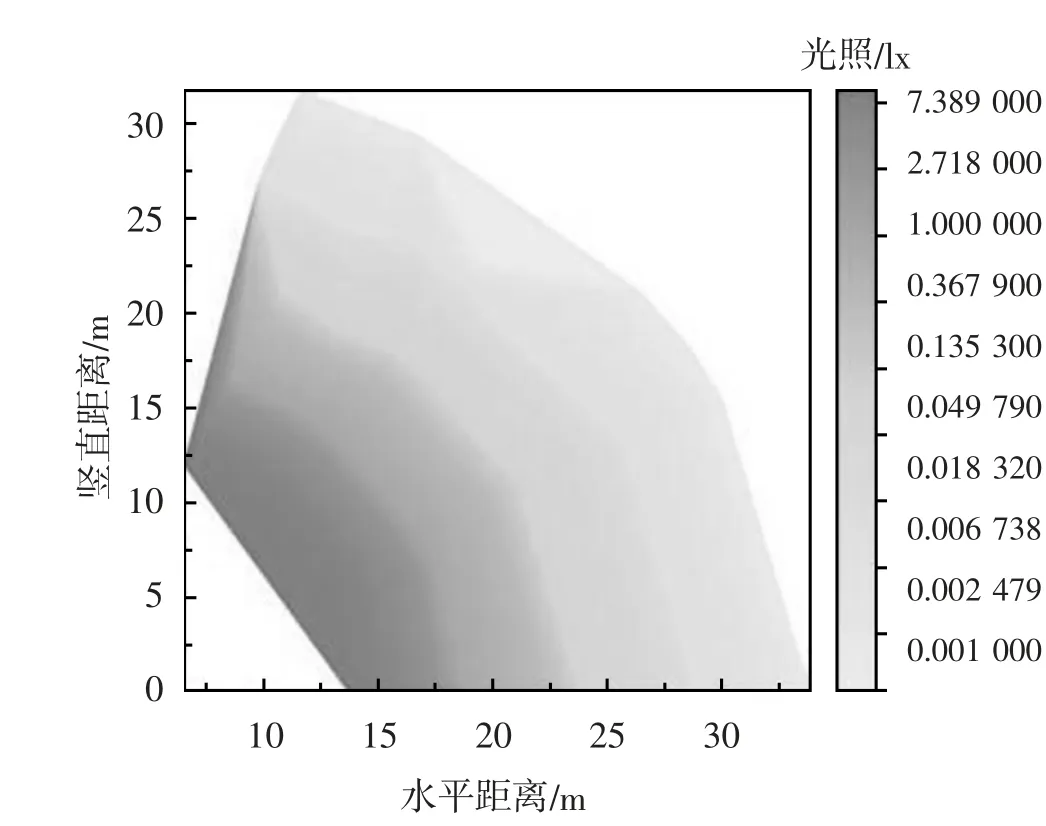
圖7 綠色LED集魚燈的水中等照度曲線分布
經過測量,單個LED綠燈在0.1~10 lx,照度距離可達21.2 m,最遠可達23.8 m。可見該配置下LED集魚燈具有衰減較弱、誘集范圍廣和發光效率高等各種優勢,在水下可以有效增加對魚群的吸引范圍,與該裝置的使用目的完美契合。
4 結論
仿生魚與集魚燈裝置組合而成的仿生機器魚,在普通的水質監測機器人基礎上進行升級,經試驗在小規模飼養環境下效果良好。該機器魚仿生了鲹科魚類,能夠避免水下航行對魚群的驚擾,搭載的LED集魚燈具有能耗低、指向性強、穿透性強的特點,集魚燈可更換的特點,使指向性誘魚成為可能。結果表明,在中小型水域內,該裝置具有極強的實用性,在監測的靈活性和視覺監測上優于無人船、浮標等相關裝置,可在不驚擾魚群的前提下進行水質和魚群視覺監測,科學化監測水產養殖情況。
在水產養殖實踐中,將仿生魚與集魚燈結合,可提升飼養者對水質與魚群的觀測效率,從而為水產養殖行業帶來便利。LED集魚燈與仿生魚結合的觀測設備具有廣泛的應用前景,但其研發工作仍處于起步階段。
猜你喜歡
環境(2023年5期)2023-06-30 01:20:01
小星星·閱讀100分(低年級)(2022年6期)2022-08-22 02:33:40
供水技術(2021年3期)2021-08-13 09:08:34
建材發展導向(2019年10期)2019-08-24 06:25:02
當代水產(2019年1期)2019-05-16 02:42:04
當代水產(2019年3期)2019-05-14 05:42:48
電子制作(2018年14期)2018-08-21 01:38:16
水利規劃與設計(2018年1期)2018-01-31 01:53:53
水利規劃與設計(2016年7期)2016-02-28 15:06:27
世界文學評論(2014年2期)2014-04-12 06:23:43