基于節(jié)點能量約束的無線傳感器網(wǎng)絡(luò)目標跟蹤算法
2022-03-02 06:15:24任騰飛
現(xiàn)代計算機 2022年23期
關(guān)鍵詞:規(guī)劃
任騰飛,周 潔
(西安工業(yè)大學電子信息工程學院,西安 710021)
0 引言
近年來,無線傳感器網(wǎng)絡(luò)在目標跟蹤、場景監(jiān)測、網(wǎng)絡(luò)信息安全等方面得到了廣泛應(yīng)用。傳感器節(jié)點隨機地布置在目標區(qū)域中來獲取目標運動、方位等信息[1]。傳感器節(jié)點布置后,能量會隨著時間逐漸耗盡并且難以充電,因此能量是一個需要重點考慮的因素,在實際的使用中往往需要同時滿足效率、能耗等諸多約束。例如在實際跟蹤場景中,如果調(diào)用全部節(jié)點進行目標的狀態(tài)估計,部分節(jié)點可能會因遠離目標而導致其對于提升估計精度的作用很小,但仍要消耗一定的通信能量[2]。因此,可以考慮在節(jié)點規(guī)劃中加入能量約束條件來進行合理的節(jié)點選取。
如今國內(nèi)外專家、學者針對節(jié)點能量約束進行了許多研究,其中,胡波等[3]提出了一種自適應(yīng)節(jié)點調(diào)度算法,該方法將問題建模為馬爾可夫決策過程迭代求解代價,綜合考慮了誤差與傳感器能量消耗。李強懿[4]設(shè)計一種基于證據(jù)理論的節(jié)點部署方案,來延長網(wǎng)絡(luò)使用壽命。彭鐸[5]將簇頭選取過程進行分解,將復雜決策問題拆分為層次結(jié)構(gòu)模型,均衡了節(jié)點能耗。文獻[6]提出一種利用RSSI測距的偽節(jié)點規(guī)劃定位算法。利用規(guī)劃算法從插入的偽節(jié)點中找出與未知節(jié)點匹配程度最佳的位置,并以此定位未知節(jié)點。降低了節(jié)點能耗。文獻[7]研究了存在有限的帶寬資源與能量約束下的多跳無線傳感器網(wǎng)絡(luò)的目標跟蹤問題,基于粒子濾波算法將傳感器節(jié)點的觀測數(shù)據(jù)量化壓縮為二元信號,并采用二元中繼策略將信息傳遞給融合中心,降低了網(wǎng)絡(luò)能耗,提升了跟蹤精度。
以上所提出的節(jié)點規(guī)劃算法僅重點考慮了領(lǐng)導節(jié)點改變時所產(chǎn)生的能量消耗,而將子節(jié)點傳輸數(shù)據(jù)給領(lǐng)導節(jié)點產(chǎn)生的開銷作為固定值,存在著一定的局限性[8]。本文提出基于節(jié)點能量約束的規(guī)劃算法。根據(jù)跟蹤中的誤差矩陣來進行節(jié)點規(guī)劃,在約束條件下關(guān)注領(lǐng)導節(jié)點改變與數(shù)據(jù)傳輸所產(chǎn)生的能量消耗,主要貢獻總結(jié)如下:
(1)首先構(gòu)建節(jié)點跟蹤模型,提出簇結(jié)構(gòu)的分布式連接網(wǎng)絡(luò),設(shè)有子節(jié)點與領(lǐng)導節(jié)點。
(2)基于能量約束提出的節(jié)點規(guī)劃算法,根據(jù)信息形式的擴展卡爾曼濾波算法完成目標跟蹤與節(jié)點規(guī)劃過程。
(3)構(gòu)建仿真模型并驗證所提出算法的有效性。
1 目標跟蹤與節(jié)點規(guī)劃
1.1 構(gòu)建系統(tǒng)模型
將N個傳感器部署在目標區(qū)域,S1,S2,…,SN代表各自位置,如圖1所示。當被跟蹤目標在傳感器節(jié)點網(wǎng)絡(luò)中機動時,其k時刻的狀態(tài)為xk=其中(xk,yk)為k時刻的目標位置,為x和y方向上的速度,目標的動態(tài)模型如下:

圖1 無線傳感器網(wǎng)絡(luò)模型
式中:A為轉(zhuǎn)移矩陣,G是常數(shù)矩陣;噪聲uk-1。
在k時刻,第i個節(jié)點的觀測方程為
記各節(jié)點的觀測為
狀態(tài)的估計量:
式中:和Mk代表估計狀態(tài)與誤差,和Pk代表預測狀態(tài)和誤差。信息形式的擴展卡爾曼濾波算法迭代形式:
1.2 目標跟蹤與節(jié)點規(guī)劃過程
依據(jù)能量約束條件來進行目標跟蹤與節(jié)點規(guī)劃,在第k時刻對目標狀態(tài)進行估計后,規(guī)劃k+1時刻傳輸數(shù)據(jù)的子節(jié)點與領(lǐng)導節(jié)點,降低傳感器節(jié)點網(wǎng)絡(luò)能量消耗,減小k+1時刻目標狀態(tài)估計誤差。
(1)數(shù)據(jù)聚合:領(lǐng)導節(jié)點收集其他傳感器節(jié)點發(fā)送的數(shù)據(jù),并利用k時刻和k-1時刻數(shù)據(jù)信息對目標狀態(tài)進行更新;
(2)目標跟蹤:通過更新目標狀態(tài),規(guī)劃k+1時刻的領(lǐng)導節(jié)點與其他子節(jié)點;
(3)傳感器調(diào)度:領(lǐng)導節(jié)點將目標狀態(tài)、估計誤差等數(shù)據(jù)傳遞給下一時刻領(lǐng)導節(jié)點。

圖2 目標跟蹤與節(jié)點規(guī)劃流程圖
2 節(jié)點規(guī)劃過程
2.1 能量約束函數(shù)
能量消耗主要由以下幾部分構(gòu)成:
(1)子節(jié)點得到觀測數(shù)據(jù),然后傳輸給領(lǐng)導節(jié)點所產(chǎn)生的能量消耗;
(2)領(lǐng)導節(jié)點接收子節(jié)點傳輸?shù)哪繕斯烙嫚顟B(tài)等信息,并在領(lǐng)導節(jié)點發(fā)生改變時,傳輸給下一個領(lǐng)導節(jié)點產(chǎn)生的消耗。
式(11)分為兩部分:數(shù)據(jù)聚合的能耗與領(lǐng)導節(jié)點間傳輸信息能耗。
2.2 節(jié)點規(guī)劃算法
信息形式的擴展卡爾曼濾波算法進行節(jié)點規(guī)劃利用的是估計誤差矩陣Mk,根據(jù)式(6)-(10),通過第k步估計出目標的狀態(tài)x?k和誤差矩陣Mk,不用第k+1步的觀測Zk+1也可以得到誤差矩陣Mk+1,因此,就可以在第k步利用Mk+1決定第k+1步哪些節(jié)點數(shù)據(jù)參與了目標跟蹤。根據(jù)式(8),Mk+1可以描述為
目標問題表示為
ai∈{ 0 ,1},c∈{s1,s2,…,sN},a=[a1,a2,…,aN]T,b為通信能量約束。
式(13)中,a與c為兩種不同變量,借助高斯-賽德爾方法(Gauss-Seidel method),進行交替迭代求解。即先固定變量c,求得ak+1的最優(yōu)解:
然后將變量a固定來求解ck+1。假設(shè)新的領(lǐng)導節(jié)點在選中的子節(jié)點中產(chǎn)生,即ck+1∈{si|ai=1,1≤i≤N},則ck+1可通過式(15)求得:
針對式(15)整數(shù)規(guī)劃問題,引入了凸松弛方法,該方法是將非凸限制條件ai∈{0,1}松弛為凸限制條件0≤ai≤1。則F(·)為關(guān)于a的凸函數(shù),可以使用內(nèi)點法來求解該凸優(yōu)化問題:
節(jié)點規(guī)劃算法流程如圖3所示。
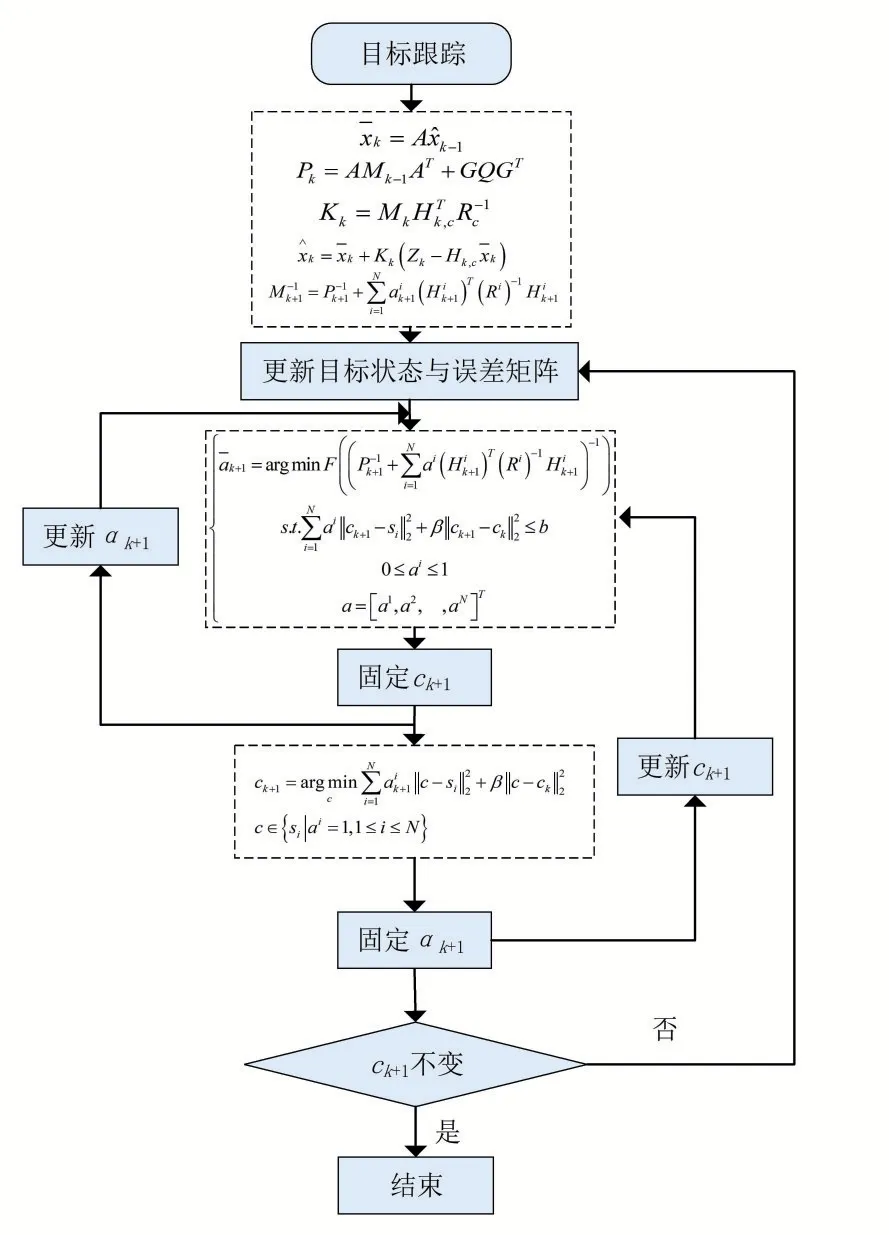
圖3 節(jié)點規(guī)劃算法流程
3 仿真與驗證
為了驗證所提節(jié)點規(guī)劃算法應(yīng)用在目標跟蹤方面的性能,以參考算法做對照,同樣是基于領(lǐng)導節(jié)點,在節(jié)點規(guī)劃中只考慮領(lǐng)導節(jié)點轉(zhuǎn)變所產(chǎn)生的能量消耗。通過仿真實驗驗證,該算法更優(yōu)。
在監(jiān)測區(qū)域內(nèi),隨機、均勻地布置傳感器節(jié)點,節(jié)點數(shù)為200。待跟蹤目標按照式(1)移動,其中:
假設(shè)噪聲uk來自于擾動,q=0.05,均值為0,協(xié)方差矩陣為Q:
觀測方程可以表示為
其中:是觀測值;P0=500,r(xk)=[xk,yk]T;噪聲均值為0,方差為1。
每次進行40步跟蹤,通過200次蒙特卡洛計算。圖4為目標跟蹤與節(jié)點規(guī)劃過程。圖中五角星代表領(lǐng)導節(jié)點位置,隨著每一步跟蹤,實線代表的真實軌跡與虛線代表的預測軌跡幾乎重合,同時相連的五角星形成了領(lǐng)導節(jié)點的更替路徑。在通信能量約束為2000時,本文與對比算法的誤差變化曲線如圖5所示。

圖4 無線傳感器網(wǎng)絡(luò)中進行目標跟蹤及節(jié)點規(guī)劃的過程

圖5 算法誤差對比
4 結(jié)語
本文在進行目標跟蹤與節(jié)點規(guī)劃過程中引入能量約束條件,綜合考慮數(shù)據(jù)傳輸和領(lǐng)導節(jié)點改變的能耗來選擇領(lǐng)導節(jié)點,有效地提升了目標跟蹤性能。在計算中對目標估計節(jié)點和待選擇的領(lǐng)導節(jié)點位置進行迭代求解,降低了該問題的復雜性。仿真結(jié)果表明,通過合理的選取與規(guī)劃領(lǐng)導節(jié)點,使目標跟蹤性能得到了提升。
猜你喜歡
房地產(chǎn)導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農(nóng)民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領(lǐng)導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術(shù)與機床(2017年3期)2017-06-23 08:11:34
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
