基于EAM的控制分配設計策略在控制律設計中的應用
2022-02-25 02:36:06曲小宇
自動化儀表 2022年2期
曲小宇,李 濤
(1.中國商飛上海飛機設計研究院,上海 201210;2.民用飛機模擬飛行國家重點實驗室,上海 201210)
0 引言
隨著現代飛機電傳飛控技術的發展,多操縱面氣動布局設計已廣泛應用于先進飛機的總體設計。該設計一方面可提高飛機的設計性能,另一方面可提高飛機的使用效率。通過不斷地更新發動機和機載設備,可使氣動布局良好的飛機使用期限延長幾十年,從而極大地降低飛機研制費用、縮短研制周期[1-8]。
飛行控制律是現代先進飛機電傳飛控系統的核心。針對先進飛機的飛行控制律,無論是基于線性飛機還是非線性飛機的假設,都是圍繞如何對操縱面進行合理控制而設計的。傳統控制策略直接計算給作動器的指令控制。例如,特征結構配置法(eigenstructure assignment method,EAM)不僅能配置閉環系統的極點,還能配置特征向量,使被控系統的動態響應在滿足一定阻尼特性的同時,又能保持各模態之間達到期望的關聯/解耦合特性,達到了良好的控制效果[9]。隨著現代控制理論的不斷發展,基于電傳飛控系統的先進飛機越來越多地采用多操縱面氣動布局設計。其優點是可提供更靈活、可靠、有效的多余度實現方式。但是,對于飛行控制律設計,不斷增加的控制變量已超過了飛行員的可操縱量,采用EAM等傳統方法越來越難以作出有根據的零點、極點配置選擇,使直接針對操縱面設計飛行控制律的方式變得非常困難甚至無法實現。因此,如何解決多操縱面的協調分配與綜合控制,已成為先進飛機飛行控制律設計中面臨的首要問題。
針對多操縱面飛機的飛行控制律設計,本文提出了一種基于EAM的控制分配設計策略。該策略采用模塊化[5]設計思路,使控制器分為傳統控制律和控制分配兩部分,并分別進行設計。首先,設計常規意義下實現指令跟蹤、穩定、抗干擾等功能的傳統控制律,得到三軸的虛擬控制指令。然后,完成虛擬控制指令到操縱面指令的控制分配設計。這樣就可以充分利用操縱面之間內在的氣動余度,通過合理地分配多操縱面,使飛機的飛行性能和飛行任務效率大幅度提高[1-8]。最后,以某型多操縱面飛機為例,采用本文提出的設計方法進行飛行控制律設計,由仿真結果驗證了該設計方法的有效性。
1 特征結構配置
對于線性定常系統,有:
(1)
式中:x為狀態變量,x∈Rn;y為輸出變量,y∈Rp;u為輸入變量,u∈Rm;A為狀態矩陣,A∈Rn×n;B為輸入矩陣,B∈Rn×m,rank(B)=m≠0、m>1;C為輸出距陣,C∈Rr×n,rank(C)=p≠0。
輸出反饋控制原理[9-10]如圖1所示。
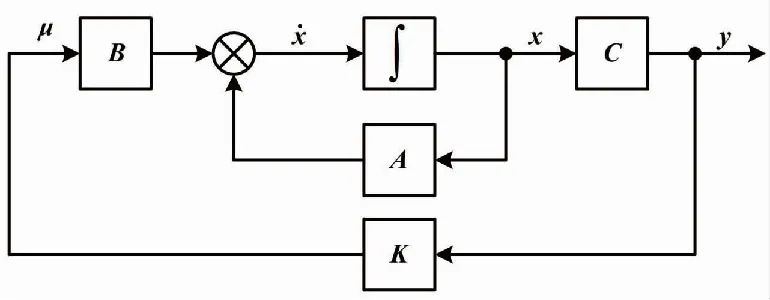
圖1 輸出反饋控制原理圖
由圖1可得輸出反饋控制律:
u=Ky=KCx
(2)
則閉環系統變換為:
(3)
式中:G∈Rn×n;K∈Rm×r;x∈Rn×1;y∈Rr×n。
設G具有r個互異特征值λi(i=1,2,…,r),對應的特征向量為vi(i=1,2,…,r),則有:
Gvi=λivi
(4)

由文獻[10]可知,給定式(1)所描述的可控可觀測系統,并且設矩陣B、C均滿秩,那么通過輸出增益反饋即控制律u=Ky,可精確配置max(m,r)個閉環特征值。
2 控制分配
2.1 問題描述
設飛機期望的轉矩向量是v(t)∈Rk,稱為虛擬控制。實際操縱面的偏轉向量u(t)∈Rm(m>k),控制分配就是在給定v(t)及映射關系G:Rm→Rk的情況下,求解方程:
Gu(t)=v(t)
(5)
式中:G為控制效率矩陣,G∈Rk×m。
考慮作動器位置飽和限制和速率飽和限制,帶約束的標準線性控制分配問題可以表述為[8-11]:
(6)
即在期望的輸入作用下,需要求解實際操縱面的偏轉向量,并滿足約束條件。
2.2 目標函數
由于待分配系統的控制量維數大于目標維數,存在冗余,可將其轉化為數學問題進行求解。現有控制分配算法的分配目標主要包括直接分配目標、誤差最小目標、控制最小目標和混合最小目標[8]。
①直接分配目標。
通過給定控制效率矩陣G和期望轉矩向量md,尋找控制向量u及標量λ。使λ取得最大值,即:
maxJ=λs.t.umin≤u≤umax
(7)

②誤差最小目標。
現有控制分配所研究的最優問題,一般指限定范圍內的最小分配誤差問題或加權最小誤差問題。其目的是求得與目標值最接近的分配結果,即:
minJ=(yd-Gu)TW(yd-Gu)s.t.umin≤u≤umax
(8)
式中:W為加權矩陣。
③控制最小目標。
僅滿足分配誤差最小不能充分發揮整個系統的潛力。由于存在冗余,滿足最小誤差的解往往不是唯一的。因此,本文在誤差最小化的基礎上又提出了控制最小化問題的研究,即:
(9)
④混合優化目標。
混合最優問題將誤差最小和控制最小問題以線性加權的形式進行綜合表述,如式(10)所示。其中:λ′表征對兩個最小指標的傾向,根據具體情況選擇。
(10)
混合最優方法已考慮到多個目標的優化,但是受計算量的影響,很難用于實時計算。因此,現有的分配方法主要針對分配誤差,不能在此基礎上進一步優化。
控制分配求解的目標往往和飛行任務有關。例如:巡航時,期望舵面阻力更小;常規飛行時,從延長壽命的角度期望舵面有較小的運動幅度。針對不同任務,可選用相應的指標來實現有針對性的優化。
2.3 優化的控制分配
針對上述四類控制分配問題的求解,結合實際的飛行控制要求,演化出了不同的控制分配研究方法。具體可以歸納為基于優化的分配法和非優化的分配法這兩大類[2]。
利用優化的數學思想對控制分配問題的研究,通常基于這樣一種理解:對于一個給定的虛擬控制量v,找到一個可行解u,使Gu=v。如果問題存在多個解,則選擇最優解;如果問題無解,則選擇使Gu最接近于v的解。為了找到符合問題的最優解,基于優化的控制分配法需要將問題的求解分為兩個階段:
(11)
(12)
式中:ud為期望的控制輸入;Wu、Wv為加權矩陣。
3 基于EAM控制分配的控制律設計
模塊化的設計方法使控制分配技術具有以下優點。①便于控制器中的參數調整。②便于控制器的重構設計。③簡化了控制律的設計:可以仍然按傳統的控制律設計虛擬控制,然后再經過分配律協調分配到相應操縱面上。④可以利用控制分配直接對操縱面進行約束限制。
控制器采用模塊化策略,使控制律和分配律分開設計。首先,傳感器將測量到的信號傳輸給控制律模塊,通過設計常規意義下的控制律,完成指令跟蹤、穩定、抗干擾等動作,得到三軸的虛擬控制指令。然后,將虛擬控制指令傳輸到控制分配模塊,通過設計優化的分配邏輯,最終輸出操縱面偏轉指令。本文采用EAM設計傳統控制律,以加權偽逆法進行控制分配設計。
基于模塊化的多操縱面飛行控制原理如圖2所示。
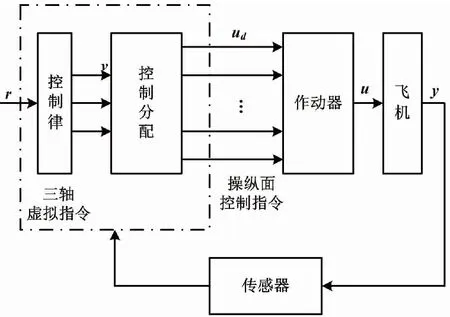
圖2 基于模塊化的多操縱面飛行控制原理圖
3.1 控制律設計
首先,對控制器進行傳統控制律的設計,采用輸出反饋形式u=Ky。對于式(1)所示的閉環系統,將輸入矩陣B變換為以下形式[12]:
(13)
取T=[BP]。P為使得rank(T)=n的任意矩陣。經相似變換,可得:
(14)
線性變換前后,系統的特征值不變,特征向量變為:
(15)

(16)
由式(16)可得閉環特征值。特征向量方程為:
(17)

(18)

(19)
由此可求得反饋增益矩陣,為:
(20)

3.2 控制分配設計
對于如式(11)、式(12)所示的基于優化的控制分配問題,如果選擇基于L2范數最小,則可以簡化為如下形式:
(21)
對于如式(21)所示的控制分配問題,其解的形式為:
u=Fud+Nv
(22)

證明:
定義以下標量函數。
H(u,λ)=0.5(u-ud)TWu(u-ud)+λT(Gu-v)
(23)
對H分別求u和λ的偏導數,利用求極值的條件,可得:
(24)
(25)
由式(24)可得:
(26)
將式(26)代入式(25),可得:
(27)
將式(27)代入式(26),最終可得:
(28)

證畢。
如果取期望的控制輸入ud=0,則Wu≠I時,優化指標變為:
(29)
此時可以求得其解,為:
(30)
對于加權矩陣Wu,矩陣元素的選擇與操縱面控制效率有關。所以通常選取的權值矩陣為對角正定矩陣,并以操縱面位置極限值平方作為對應對角元素。如果適當增加控制效率低的操縱面的權值,則可以加大其出舵量,從而避免操縱效率高的舵面過早進入飽和狀態。
3.3 基于EAM控制分配的控制律設計
基于EAM控制分配的控制器結構如圖3所示。
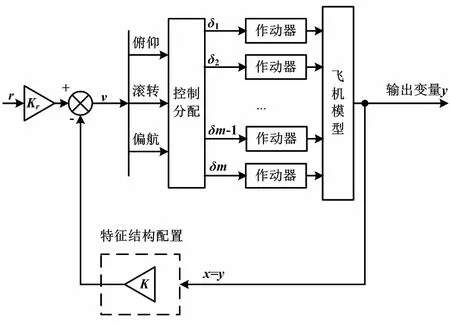
圖3 基于EAM控制分配的控制器結構圖
根據式(2)和圖3可以得出,傳統的控制律輸出v為:
v=Krr-Kx
(31)
綜上所述,基于EAM控制分配的控制律設計設計步驟如下。
①根據期望實現的飛行控制系統的性能指標,對多操縱面飛行控制系統配置期望特征值。
②根據3.1節特征向量的解耦設計方法,設計期望特征向量,并計算特征向量矩陣。
③根據式(20)計算反饋增益矩陣K。
④根據式(31),可求得虛擬控制v=Krr-Kx。
⑤確定進行控制分配的目標函數。
⑥設定約束條件。
⑦選定加權矩陣Wu。


4 仿真驗證
以某型多操縱面先進飛機為例進行仿真驗證。其線性定常數學模型如式(1)所示。狀態變量x=[αβpqr],其模態分別為迎角、側滑角、滾轉角速率、俯仰角速率和偏航角速率。操縱面指令u=[δclδcrδelδerδr]T。其中:δcl為左鴨翼;δcr為右鴨翼;δel為左升降副翼;δer為右升降副翼;δr為方向舵。取飛行狀態點M=0.22、H=3 000 m,則操縱面的位置限制如表1所示。本文的計算忽略作動器速率限制。

表1 操縱面的位置限制
控制效率矩陣為:
(32)
期望飛機運動的主導特征值為:
(33)
根據EAM,設置期望特征向量Vd。
(34)
式中:×為特征向量中不受約束的元素;0為希望解耦的元素。
短周期模態中,期望特征向量與β、p和r保持解耦,故設置對應元素為0,從而體現α和q的性能。荷蘭滾運動主要與β和r有關,希望與α、q模態和p模態保持解耦,故設置對應元素為0。滾轉運動則期望與α、q模態和β、r模態保持解耦,故對應元素設置為0。
當系統模型為輸出反饋時,根據式(20),求得輸出反饋增益:
(35)
此時,可以精確地配置到期望的主導極點:
(36)
取Kr=K-G-1A,根據式(31),可得虛擬控制輸入:
v(t)=(K-G-1A)r-Kx
(37)
在所有飛行條件下,對于要求的控制力矩,按照使用側重點的不同,對各個控制量進行加權,以減少氣動舵面總的偏轉量。本文取加權矩陣:
(38)
取仿真時間為15 s,計算方式設置為定步長,采樣頻率為160 Hz。
桿指令信號如圖4所示。
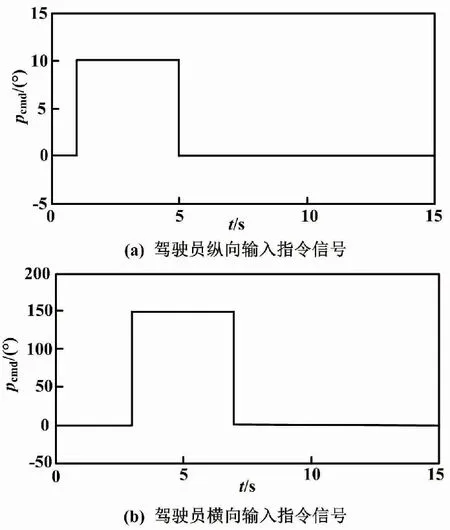
圖4 桿指令信號
當t=1 s時,輸入一個俯仰指令;當t=3 s,輸入一個滾轉的指令。
狀態量響應曲線如圖5所示。
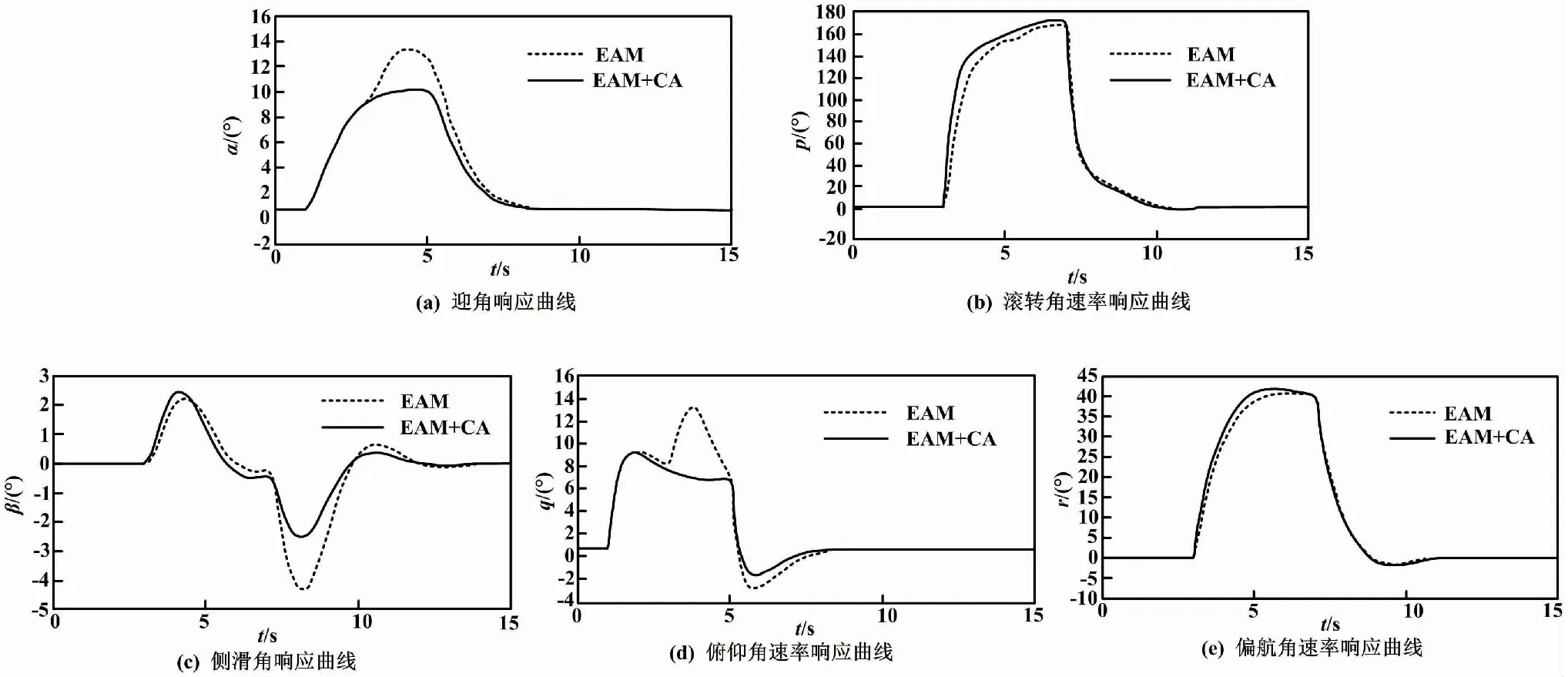
圖5 狀態量響應曲線
從圖5可以看出,采用本文提出的設計方法,可以快速、準確地響應指令,顯示出了良好的控制效果。而采用傳統EAM,俯仰方向的響應最大為13.9°,已大大超出指令信號,不能很好地跟蹤指令。另外,操縱面的指令也已經超出了位置限制。對于多操縱面控制系統,該方法的控制效果不佳。
各操縱面的偏轉情況如圖6所示。其中,虛線表示物理位置限制,即上下限。
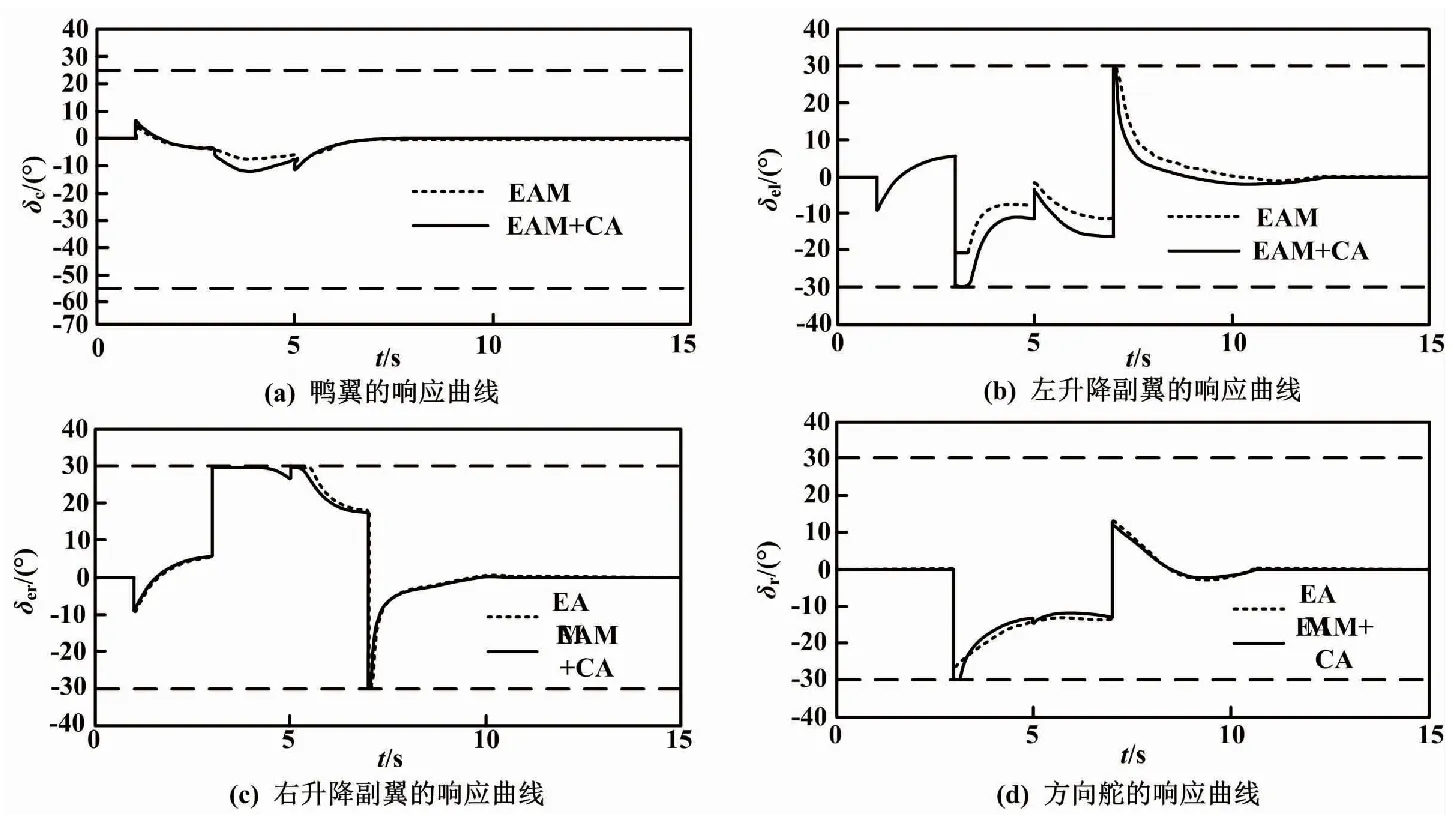
圖6 各操縱面的偏轉情況示意圖
由圖6可以看出,當t=1 s時,輸入俯仰指令后,各操縱面未發生飽和。這時,兩種設計方法均可以合理分配操縱面,產生相同的控制效果。但是,當t=3 s時,輸入滾轉指令后,傳統的EAM使左、右升降舵補助翼和方向舵都超出了位置約束限制,造成了俯仰方向不能準確跟蹤指令的結果。而采用基于EAM的控制分配設計方法,當右升降舵補助翼飽和時,控制分配器重新分配左升降舵補助翼和鴨翼,彌補了控制效率的不足,控制響應依然可以較好地滿足期望的要求。
本文采用基于EAM的控制分配設計方法,針對多操縱面飛機,仍然按原來三軸方向對EAM進行設計,簡化了計算過程。模塊化后通過控制分配,只需根據式(30)進行響應的迭代運算來求解,計算速度快。進行多次MATLAB仿真計算,迭代次數取N=200,優化計算的平均時間為6.3 ms,最大時間為6.68 ms,平均誤差為3.35×10-2ms,最大誤差為3.78×10-2ms。仿真結果表明,該方法很好地滿足了飛行控制系統的實時性要求。
由此可以看出,針對多操縱面飛機的控制律設計,傳統EAM顯得力不從心,而應用基于EAM的控制分配法設計的控制律能夠較好地解決多操縱面的協調分配問題,保證了各個操縱面均工作在位置飽和約束范圍內。整個控制系統能快速、準確地跟蹤操控指令,取得了滿意的控制效果。
5 結論
針對傳統EAM設計多操縱面飛機存在的問題,本文基于某典型多操縱面飛機,首次研究了基于EAM和加權廣義逆控制分配的多操縱面飛行控制律設計。仿真結果表明,與傳統EAM設計相比,本文提出的基于EAM控制分配的控制策略既兼顧了EAM的優點,又充分利用了控制分配技術的特點,能夠很好地協調分配各操縱面,發揮了冗余操縱面的潛力。該策略實際運算快速,控制效果良好,適合工程應用,為解決多操縱面飛機的飛行控制律設計拓寬了研究思路。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
鐵道通信信號(2020年9期)2020-02-06 09:15:22
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
測控技術(2018年5期)2018-12-09 09:04:26
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
電子測試(2018年18期)2018-11-14 02:30:34
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
