車載自組織網絡中并發廣播沖突研究
2022-02-25 02:36:10肖廣兵
自動化儀表 2022年2期
關鍵詞:信息
葛 晨,孫 寧,肖廣兵
(南京林業大學汽車與交通工程學院,南京 210037)
0 引言
車載自組織網絡(vehicle-mounted Ad hoc network,VANET)作為智能交通系統[1](intelligent traffic system,ITS)的核心框架載體,通過車-車(vehicle to vehicle,V2V)通信、車-路(vehicle to infrastructure,V2I)通信等實現道路安全信息在人-車-路之間的交互共享,以提高出行效率、保障行車安全。目前,基于VANET網絡的應用服務可分為安全性相關與舒適性相關兩大類。安全性相關應用是指人-車-路交互共享與交通安全相關的數據信息,如剎車預警、碰撞預警、超車預警等,以提高道路交通安全。舒適性相關應用是指通過人-車-路交互共享非安全相關的數據信息,如影音共享、車載游戲等,提升駕乘體驗。針對安全性應用,歐洲電信標準委員會(European Telecommunications Standards Institute,ETSI)在合作式智能交通系統標準(cooperative intelligence transport systems,C-ITS)中定義了合作感知消息(cooperative awareness message,CAM)的概念;建議每個車輛周期性廣播自身的CAM消息,其中包含地理位置、實時車速、安全警告等內容;通過與周圍臨近的車輛、智能路基設施等交換當前的運行狀態和道路交通信息,增強對交通安全隱患的協同防控能力。然而,VANET作為一個典型的分布式網絡,在數據信息交互的過程中僅能獲取局部人-車-路信息,加之車輛快速移動使得網絡拓撲結構動態變化,會頻繁引發并發廣播沖突問題[2]。
由此可見,并發廣播沖突問題已經成為制約VANET網絡性能,特別是安全性相關應用發展的瓶頸。解決VANET網絡內存在的并發廣播沖突問題,從而實現人-車-路之間道路安全信息的可靠、實時交互,具有現實的理論研究需求和工程實踐意義。因此,本文針對目前適用于VANET網絡的并發廣播沖突解決方案進行了分類,并闡述了當前的并發廣播沖突問題研究現狀。
1 VANET網絡概述
1.1 VANET網絡的架構
車載自組織網絡的基本框架主要由車輛、行人、路基單元(road unit side,RSU)、通信服務商等組成。車輛、行人和路基單元是VANET網絡中的基本節點,通過裝備智能移動單元,如車載設備(on board unit,OBU)等,實現信息在人-車-路之間的數據信息交互。通信服務商則為基本節點提供信息接入服務,如數據上傳/下載、后臺數據更新等。需要注意的是,車輛、行人和路基單元等基本節點不僅能夠通過通信服務商直接進行數據信息交互,還需要與周圍臨近的其他基本節點通過無線自組織網絡進行數據信息交互,以獲取更為全面、綜合的道路信息。
車載自組織網絡的基本框架如圖1所示。
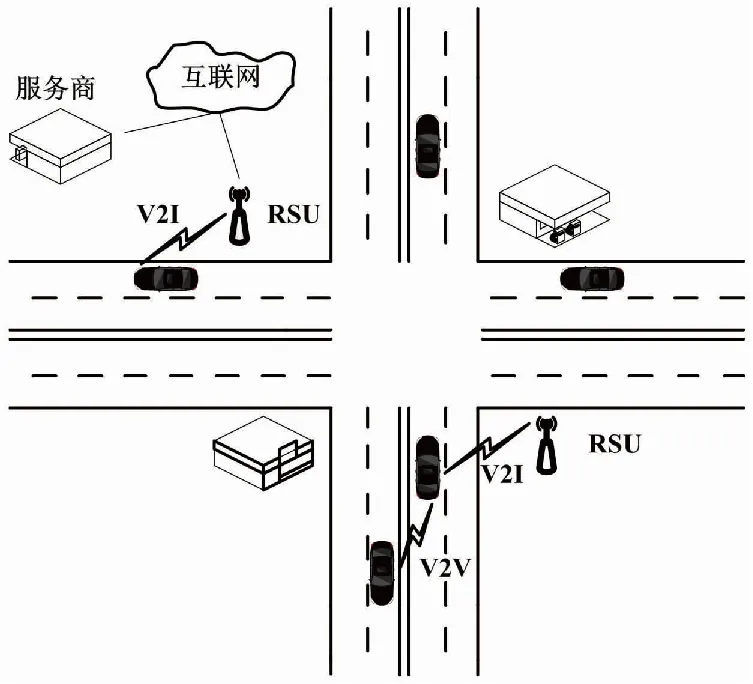
圖1 車載自組織網絡的基本框架
1.2 并發廣播沖突問題
由于CAM消息中包含了道路交通安全相關的數據信息,并發廣播沖突造成的持續丟包會造成嚴重的交通安全隱患。并發廣播沖突問題在VANET網絡中存在兩種形式:一種是兩個或多個彼此不在各自廣播覆蓋范圍內的節點同時廣播CAM消息,在其共同鄰居車輛處造成數據沖突;另一種則是兩個或多個彼此位于對方的廣播覆蓋范圍內的節點同時廣播CAM消息,在其自身處造成數據沖突。兩種形式的并發廣播沖突都將造成持續的CAM消息丟包。并發廣播沖突的兩種產生形式如圖2所示。

圖2 并發廣播沖突示意圖
在圖2(a)中,當車輛v1向鄰居車輛v3傳輸消息,而對面車道駛來的車輛v2也同時向車輛v3傳輸消息,則兩者的并發廣播將在共同鄰居車輛v3處引發數據沖突,導致車輛v3丟失車輛v1、v2發送的數據包。在圖2(b)中,當車輛v1與對面車道的車輛v2同時駛入對方的傳輸范圍時,兩者的并發廣播將在自身處引發數據沖突,造成兩輛車都將丟失對方發送的數據包。
無線自組織網絡中的并發廣播沖突屬于無線通信領域隱藏終端問題的范疇。業內對該問題的研究起步較早,目前已提出了較多解決方案。其中,握手協議是一種簡單、有效的方法,即發送和接收節點通過傳輸RTS/CTS信號預約信道,確認空閑后才進行數據傳輸。典型的握手協議包括載波偵聽多路訪問(carrier sense multiple access with collision avoidance,CSMA/CA)、多路訪問沖突避免(multiple access collision avoidance,MACA)、無線多路訪問碰撞回避(multiple access collision avoidance for wireless,MACAW)等。然而,由于VANET網絡中的車輛節點以廣播通信模式為主,且車輛具有動態變化性,因此握手協議并不適用于VANET網絡。
2 并發廣播沖突問題研究現狀
考慮到車輛節點的快速移動特性,現有針對VANET網絡中并發廣播沖突問題的解決方案大致可分為三類,即硬件輔助控制、路由信息交互以及主節點控制。
2.1 硬件輔助控制
硬件輔助控制是指車輛通過控制其搭載的硬件設施,如天線、收發器等,對車輛間的并發廣播沖突進行處理。
馬曉明[3]等在提出的分布式跨層協議中規定,車輛廣播的消息按優先級劃分為一級緊急消息、二級緊急消息以及例行廣播消息。車輛在廣播一級緊急消息、二級緊急消息時,將同步開啟雙頻忙音。鄰車接收到忙音后將不會在同一時刻廣播自身的消息,直至忙音消失。這可以避免并發廣播沖突。然而,車輛開啟忙音將會占據部分帶寬,浪費信道資源。同時,開啟忙音通常需要車輛架設兩根天線,引入了不菲的硬件開銷。
文獻[4]通過調整傳輸功率,對并發廣播沖突進行控制。其核心思想是車輛根據車輛密度等信息調整傳輸功率,避免發生并發廣播沖突。當車輛密度較大時,車輛降低傳輸功率以減小傳輸范圍。即使此時有其他正在廣播的車輛,但雙方的傳輸范圍互不覆蓋,因此不會發生并發廣播沖突。然而,由于傳輸范圍變小,車輛僅能獲得少數鄰車的CAM消息,無法滿足其安全行駛的需求。
李帥兵[5]等提出一種基于模糊邏輯的自適應功率控制策略(adaptive power control strategy based on fuzzy logic,FAPCS)。他們建立了理論傳輸范圍計算模型,預測出車輛密度和滿足90%的CAM消息傳輸率時的傳輸功率。相較于其他方案,FAPCS調整傳輸功率時不僅取決于車輛密度值,還取決于車輛能否獲取足夠的道路安全信息。
Li Shujing[6]等提出一種調整傳輸功率與沖突檢測并行的方案。該方案中,車輛具有兩種傳輸功率(即P1、P0)和兩種傳輸范圍(即R1、R0),如果車輛在通信過程中檢測到有兩輛車占用同一時隙,存在發生沖突的風險,則該車輛將在其CAM消息中發出通知。沖突方將根據其與占用同一車輛的相對距離大小,作出調整傳輸功率或跳轉時隙的處理。
硬件輔助控制能夠有效控制并發廣播沖突,但也存在不足。文獻[4]~文獻[6]利用功率對并發廣播沖突進行控制時,忽略了車輛對道路安全信息的需求。此外,絕大部分硬件輔助控制方案不具備自主檢測沖突能力。同時,該類方案通常會引入硬件開銷,增加了成本。
2.2 路由信息交互
路由信息交互即車輛將自身維護的鄰車列表、幀信息列表等與周圍鄰車進行共享,從而對已發生或潛在的并發廣播沖突進行檢測和處理。
Van Dung Nguyen[7]等在時分多址接入協議(time division multiple access,TDMA)的基礎上,提出基于路基單元輔助的檢測沖突(RSU coordination for TDMA-based MAC,RCMAC)方案。在RCMAC中,車輛及RSU均維護單跳鄰車列表(one-hop neighbors list,ONL),以記錄車輛的鄰車對時隙的占用情況。當車輛訪問信道時,將隨機占用時隙,根據接收到的消息更新自身的ONL。同時,RSU將整合其傳輸范圍內所有車輛的ONL,并在每一幀開始時廣播,以調度其傳輸范圍內的車輛廣播。
RCMAC能夠對潛在或已發生的并發廣播沖突進行處理,但其工作過程嚴重依賴RSU。針對此問題,Zou Rui[8]等在VeMAC協議的基礎上提出一種無沖突預約(collision free reservation,CFR)協議。CFR協議仿照VeMAC協議,將每一幀分為兩個時隙集,從而分配給不同行駛方向的車輛,解決了不同行駛方向的車輛相遇時產生的并發廣播問題。此外,CFR規定每輛車均維護一個幀信息(frame information,FI)列表,從而記錄當前的時隙狀態、車輛ID等信息。車輛訪問信道時,將初步生成自身的FI列表,并將其狀態標記為free(空閑)、collision(沖突)、busy-1(被其一跳鄰車占用)、busy-2(被其二跳鄰車占用),從而占據時隙、避免沖突。
VeMAC協議通過劃分時隙集解決了不同行駛方向的車輛在相遇時產生的并發廣播沖突。然而,VeMAC中的時隙集大小是固定的。這使得VeMAC在一些特殊的交通場景中的發揮出的性能并不盡如人意,如繁忙的十字路口。針對此問題,文獻[9]在VeMAC協議的基礎上提出了A-VeMAC協議。A-VeMAC協議在分配時隙集時考慮到兩邊車道上車流量的因素,使車流量多的車道獲得更多的時隙,從而完善了VeMAC方案中的不足。
RCMAC和CFR檢測沖突時都依賴于沖突方各自的一跳鄰車。如果此時沖突方均不存在一跳鄰車,則無法檢測到并發廣播沖突。但總體而言,路由信息交互仍憑借其具備的自主檢測能力而成為目前較為主流的并發廣播沖突檢測方案。
2.3 主節點控制
主節點控制是指利用中心節點簇頭(cluster head,CH)對車輛的廣播進行調度,避免發生并發廣播沖突。此類方案通過集群形成算法將車輛整合為集群,篩選出具有最優條件的車輛成為簇頭,并利用簇頭對集群內部的車輛進行調度,實現無沖突廣播。
Yvonne Gunter[10]等提出的基于集群的介質訪問控制(cluster based medium access control,CBMAC)協議將車輛整合為集群的形式行駛,并通過算法篩選出中心節點作為簇頭,由簇頭安排集群內車輛的廣播;同時,重新定義了幀結構。幀結構如圖3所示。
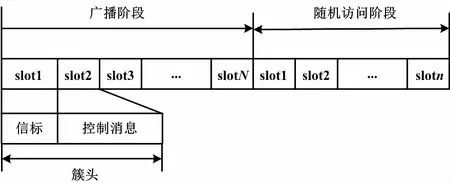
圖3 幀結構示意圖
由圖3可知:每一幀劃分為車輛廣播階段與隨機訪問階段,車輛廣播階段中的頭兩個時隙固定分配給簇頭。時隙1中,簇頭將廣播信標消息,接收到信標消息的車輛均默認自身加入由該簇頭管理的集群。時隙2中,簇頭將廣播當前幀的廣播安排,以免集群內部車輛發生廣播沖突。新車輛加入時將在隨機訪問階段廣播注冊消息以申請時隙。簇頭接收到新車輛的注冊消息后,將為其安排時隙。該方法解決了并發廣播沖突問題。然而,由于時隙的總數是不變的,在車輛密度較大的交通環境中,集群內部可能因為車輛總數超過時隙總數而發生并發廣播沖突。文獻[11]提出的TC-MAC協議規定,根據車輛密度動態變化時隙數目,確保車輛能以最大公平性接入信道。在極端情況下,即使車輛數超過時隙數,簇頭也可根據車輛的地理位置安排距離較遠的車輛對時隙進行復用,從而充分利用信道資源。
然而,上述方案未考慮集群間的廣播沖突問題。因此,Aghmaz Ul Haq等[12]提出一種基于車輛位置和移動方向(location and mobility-aware clustering based TDMA,LMA-CT)協議,解決了集群間的并發廣播問題。LMA-CT借鑒了VeMAC協議,將一幀劃分為兩個時隙集,使不同行駛方向的車輛占用不同的時隙集。此外,LMA-CT協議規定:車輛均維護一個FI列表,由車輛實時交換并更新FI列表,以占用無沖突時隙;同時,對已發生的沖突進行檢測及處理。
基于主節點控制的方法能夠有效地解決并發廣播沖突。但集群行駛目前僅是一個構想,存在如集群的形成、維護、簇頭選擇等問題。盡管如此,此類方案仍具有廣闊的發展前景。
2.4 性能比較
為了從性能上對上述三類方案進行對比,利用以下指標進行評價。
①自主檢測能力:評價方案是否具備自主檢測并發廣播沖突的能力。
②源頭阻截能力:評價方案是否具備防止并發廣播沖突發生的能力。
③適應性:評價方案在不同交通環境中是否均具備檢測沖突或防止沖突發生的能力。
④硬件開銷:評價方案在解決問題的同時是否引入額外的硬件開銷。
⑤通信開銷:評價方案在解決問題的同時是否引入額外的通信開銷。
方案性能對比如表1所示。

表1 方案性能對比
3 存在的問題與未來研究方向
3.1 存在的問題
通過對上述三類方案的闡述與比較,可大致歸納出目前在解決并發廣播沖突問題上存在的幾個問題。
①成本問題。
文獻[3]需要車輛裝設兩根天線,引入了不菲的硬件開銷。文獻[7]和文獻[8]需要車輛維護路由信息表,產生了額外通信開銷。
②分布式網絡中的沖突檢測及處理。
目前,部分文獻在解決并發廣播沖突時假設車輛能夠獲得全局網絡信息。然而,這種假設在真實的VANET網絡中是不現實的,甚至是不可能實現的。
③集群的相關問題。
主節點控制引入了集群的形成、維護、簇頭選擇等問題,但目前業內對這些問題的研究也尚未形成共識。
3.2 未來研究方向
①低成本化的解決方案。
考慮到未來VANET網絡將大范圍投入使用,同時網絡內的節點數目眾多,并發廣播沖突解決方案的低成本化勢在必行。
②適用于分布式網絡的解決方案。
未來,在對VANET網絡中的并發廣播沖突問題研究時,需充分考慮到VANET網絡的特性。
③集群的行駛模式。
集群行駛的模式不失為未來VANET網絡的一個重要發展方向,因此可在集群間的廣播沖突方面展開深入研究。
④車輛丟包的后續處理。
在有效時間內對丟失的數據包進行恢復,將是目前及未來的研究重心之一。
4 結論
VANET網絡在車輛通信方面發揮著巨大的作用,具有廣闊的發展前景。并發廣播沖突問題的存在嚴重影響了車輛間的數據包交換,對安全行駛造成了潛在隱患。因此,檢測并處理并發廣播沖突對VANET網絡的發展而言具有長遠意義。本文對目前已提出的并發廣播沖突解決方案進行了總結與分類,分析了各類方案中的優缺點,提出所述方案中存在的一些問題,并列出了解決VANET網絡中并發廣播問題的幾個方向。該研究為后續并發廣播沖突的處理提供了借鑒。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
