基于機器視覺技術的分揀機器人研究綜述
2022-02-24 12:48:26王成軍韋志文嚴晨
科學技術與工程 2022年3期
關鍵詞:人工智能
王成軍, 韋志文, 嚴晨
(1.安徽理工大學人工智能學院, 淮南 232001; 2.安徽理工大學機械工程學院, 淮南 232001)
視覺是物體影像刺激視網膜所產生的感覺[1]。人類感知外部環境主要通過視覺、觸覺、聽覺以及嗅覺等感覺器官,但其中約 80% 的信息是通過視覺器官獲取的[2]。機器視覺是機器對圖像進行自動處理并報告圖像內容的過程。機器視覺技術則應用感光元件和計算機技術模擬人類視覺功能[3],代替人眼進行目標相似性度量和基于目標圖像特征的模式識別。隨著視覺傳感技術、計算機技術、圖像處理技術以及人工智能的高速發展,機器視覺技術日趨成熟,已發展成為現代加工制造業和綠色制造業重要的核心技術[4],包括視覺傳感器技術、光源照明技術、光學成像技術、數字圖像處理技術、模擬與數字視頻技術、計算機軟硬件技術以及自動控制技術。機器視覺技術不但能模仿人眼的絕大部分功能,而且可完成很多人眼所不能勝任的工作[5]。
傳統的分揀工作主要靠人工來完成,但隨著工業自動化程度的提高,人類視覺顯然不能適應快節奏、高強度的工業生產,故生產過程中的許多環節被機器人所替代。
在新一輪科技革命和產業變革背景下,分揀機器人順勢發展,自動分揀技術逐漸成為工業生產的主流,將機器視覺技術應用于分揀機器人可減少人工分揀工作量、降低分揀差錯率,極大地提升工業生產效率,實現分揀作業的自動化和智能化。
國外一些發達國家的機器視覺技術經歷了漫長的歲月,相關技術較為成熟。中國機器視覺技術起步較晚,與發達國家相比存在較大差距[6],但隨著人口紅利下降,中國市場對工業機器人需求量不斷增大,分揀機器人技術得到飛速發展。
在基于機器視覺技術分揀的應用背景下,重點綜述不同領域分揀機器人的應用,并對未來相關技術的應用趨勢進行展望。
1 機器視覺技術
1.1 機器視覺技術的發展
機器視覺技術隸屬于計算機學,是其衍生的一個重要分支,從最初的萌芽到如今的發展,機器視覺技術經歷了幾十年的歲月,其功能和應用范圍逐步完善和擴展。早在20世紀50年代,國外學者就帶頭開始了二維圖像統計模式識別的研究[7];到了 60 年代,Roberts[8]把研究方向轉移到了三維機器視覺上; 70 年代中期,麻省理工學院(massachusetts institute of technology,MIT)人工智能實驗室正式開設“機器視覺”的課程[9]; 80 年代,機器視覺技術爆發了全球性的科研浪潮,發展突飛猛進,新概念、新工藝、新理論和新方法層出不窮[10];步入90年代,計算機圖像采集設備逐漸升級,圖像處理技術與機器人控制技術不斷發展完善,機器視覺技術相關算法也成了研究焦點,并獲得深入發展[11]; 20 世紀末,Zhang[12]提出了基于二維平面靶標的標定方法,該方法可實現相機內外參數的求解; 21 世紀初期,Lowe[13-14]提出的SIFT(scale-invariant feature transform)特征提取方法得到了更深入的發展和完善,并被廣泛應用于機器視覺、三維重建等領域; 2006年,Hinton等[15]開啟了機器視覺技術發展核心領域——深度學習在學術界和工業界的研究浪潮;2012年,Krizhevsky等[16]通過卷積神經網絡在ImageNet圖像識別比賽中取得了突破性進展,其構建的CNN(convolutional neural networks)網絡AlexNet首次采用了線性整流函數ReLU(rectified linear unit),提高了收斂速度并解決了梯度消失問題; 2020年Belan等[17]提出了一種用于機器視覺質量檢測的機器視覺系統(machine vision studio,MVS),并通過實驗結果證明了MVS的魯棒性和可行性。
隨著制造業和物流行業的快速發展,分揀機器人被廣泛應用在各個領域中,而其分揀過程涉及最核心的領域就是機器視覺技術。由于機器視覺技術的引入,分揀過程實現了精準和高效,分揀機器人朝著智能化、自動化方向快速演進。
1.2 人工智能下的機器視覺技術
機器視覺技術是實現人工智能和智能制造的重要技術,其可實現工業自動化現場產品的缺陷檢測、機器視覺引導定位等,對工業機器人代替人力起決定作用。
機器視覺技術和人工智能讓機器擁有了眼睛和大腦,機器視覺技術是人工智能的核心領域之一,也是推動人工智能發展的重要力量。機器視覺技術與人工智能以及其他領域的關系如圖1所示。

圖1 機器視覺技術與其他領域關系
機器視覺技術屬于交叉學科,與很多的領域都有關聯。其與人工智能的關系最為密切,對制造業的發展產生了深遠影響,并提高了生產的柔性和自動化程度。隨著不斷地探索和創新,屬于機器視覺技術的新時代將很快到來,基于機器視覺技術的產品將會投入到眾多領域,尤其是環境復雜且惡劣的場合[18]。機器視覺技術的研究方向主要包括多傳感器信息融合、深層初級視覺、視覺深度學習[19]、主動視覺[20]、完整三維場景重構、視覺并行計算結構以及通用視覺信息系統等[21]。
在人工智能時代的大背景下,機器視覺與其他傳感器融合的方法將成為研究的熱點。而實驗室中進行的機器視覺研究基本處于理想情況下固定的環境,輸入源多為靜止或瞬時視覺信息,難以滿足對復雜客觀世界的認識需求[22]。多傳感器信息融合方法不單單指多個傳感器本身融合,其核心在于各傳感器系統內部各信息通道的融合、系統模塊的融合以及各類信息處理方法的融合[23]。多傳感器信息融合將會使機器視覺技術在應用中更加精準且高效,也將使人工智能變得更加智能,方便更好地服務人類[24]。
1.3 圖像處理技術
分揀機器人的工作過程可以理解為在機器視覺的引導下,分揀機器人的末端執行器到達相應位置抓取物件并放到指定位置的過程,如圖2所示。首先應該對視覺攝像頭進行位置標定,然后視覺攝像頭才能精準地采集物件的圖像[25]。其次進行最核心的步驟——圖像處理,通過圖像處理確定物件的坐標和特征,將信息轉化成為末端執行器的坐標和姿態,保證精準且高效地完成分揀工作。
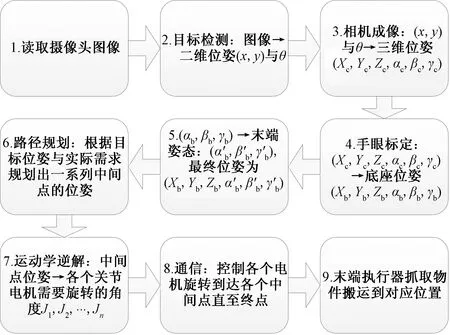
圖2 分揀機器人工作流程圖
圖像處理技術是用計算機對圖像信息進行處理的技術,主要包括圖像預處理、圖像數字化、圖像增強和復原、圖像數據編碼、圖像分割、形態學處理、圖像投影、配準定位以及圖像特征提取,通過圖像處理可以提升圖像中的有用信息并且精簡數據量,是決定分揀過程是否能夠達到精準且高效的關鍵。
圖像預處理是將每一個文本圖像分檢進行分類并將其送交識別模塊進行識別,常用的方法有圖像濾波、二值化和邊緣提取[26]。圖像濾波方法有均值濾波、中值濾波、高斯濾波、BM3D濾波和雙邊濾波等,其目的是消除或者抑制圖像中的噪聲[27]。圖像的二值化處理是將圖像上像素的灰度值置為0 或 1,讓整個圖像呈現出明顯的黑白效果,從而獲得可以反映圖像整體和局部特征的二值圖像。這樣獲得的圖像包含的數據量大大減少,使得后續處理過程變得簡單。二值化處理最常用的是Otsu[28]和Kittler等[29]兩種方法:Otsu方法的中心思想是閾值T應使目標與背景兩類的類間方差最大,又稱最大類間方差法;Kittler方法的中心思想是,計算整幅圖像的梯度灰度的平均值,相對于Otsu方法速度更快,更適合應用于像素質量較高的圖像中。使用邊緣特征來代表整個圖像,這樣可以大大減少內存中的數據量,常用的方法有Sobel模板邊緣檢測、Laplacian模板邊緣檢測、Canny邊緣檢測以及霍夫變換直線檢測等。
圖像增強的目的就是增強圖像中有價值的信息,其最終的目標是優化圖像的視覺效果,提高圖像的可讀性[30]。圖像增強技術一般可分為空間域法與頻率域法兩大類[31]。空域增強方法可以表示為
g(x,y)=T[f(x,y)]
(1)
式(1)中:f(x,y)表示增強前的圖像;g(x,y)表示增強后的圖像;而T表示增強操作。空間域法[32]的重點是在空間域中直接計算處理圖像的各個像素灰度值;而頻率域法[33]則是在圖像的某種變換域內,通過某種運算間接處理圖像的變換系數,之后再變回空間域中,因此可看作是一種間接增強的算法。
圖像分割[34]是指把圖像分割成若干個特定的或者獨具特質的區域并從中提煉出需要的對象的技術和過程。圖像分割的方法中最常用的有閾值分割、區域分割、邊緣分割以及特定分割四大類[35]。但是迄今為止,圖像分割算法基本上都是基于特定問題具體分析的,沒有統一的、標準的圖像分割算法[36]。因此,圖像分割技術正在朝著迅捷、精確且統一的標準化方向高速發展,也是目前非常值得研究的方向之一。
圖像特征提取與識別是我們都熟悉的一個概念,圖像特征提取就是獲取圖像的特征信息的操作,特征提取是圖像壓縮,圖像理解,圖像分類以及識別的基礎。圖像特征[37]是指圖像最初的特質或屬性,底層的特征包括顏色、紋理、形狀以及區域結構等多方面的內容。對于特征提取的算法來說,算法的魯棒性會直接影響整個缺陷檢測系統的魯棒性,甚至會影響系統的穩定性[38]。現階段常用的圖像特征有Hu不變矩、Haar特征和surf特征,三種特征均具有良好的魯棒性。
2 分揀機器人
分揀機器人[39]是一類具備了傳感器、物鏡以及電子光學系統的機器人,可精確且高效地分揀物件。其分揀工作是將物件按品種、出入庫順序分別放到指定位置的作業[40];而視覺分揀則是將物件識別和分類的過程交給視覺系統處理。基于機器視覺技術的分揀機器人提高了分揀的速度、確保了分揀的質量、減輕了員工的勞動強度,同時也提高了人員的使用效率,為社會的發展做出了巨大貢獻,為人工智能更進一步奠定了堅實的基礎。
2.1 分揀機器人的組成
分揀機器人是一個集機械、電氣、計算機于一體的機電一體化設備,主要由三大部分六個子系統組成[41]。三大部分包括機械部分、傳感部分以及控制部分。六個子系統包括驅動系統、機械結構系統、感受系統、機器人-環境交互系統、人機交互系統以及控制系統[42]。驅動系統[43]可分為液壓驅動、電氣驅動以及氣動驅動三種,三種系統各有所長,如液壓驅動系統適用于分揀機器人搬運大型物件,電氣驅動系統的控制性能好,常用于高精度分揀機器人,而氣動驅動系統是一種柔性系統,價格低且功率質量比最低。機械結構系統是分揀機器人最基本的要素,主要由執行機構、傳動機構和支承部件組成,用于完成規定的動作,傳遞功率、運動和信息以及支承連接相關部件。對分揀機器人來說,末端執行器是機器人機構拓撲結構的核心,主要分為氣吸式和機械夾持式。感受系統[44]是由內部與外部各自的傳感器模塊組合而成,用于獲得內部和外部環境狀態中有價值的信息,在子系統中占居核心地位;而機器視覺作為感受系統的子系統,在分揀過程中扮演著一種不可或缺的角色。把機器視覺技術融合于分揀機器人中,精準且高效地將物件從其所處位置分揀出來,并搬運到指定位置按預定的格局進行分類、集中[45]。機器人-環境交互系統[46]是完成分揀機器人和周圍環境裝置相互溝通與協調的系統,它的存在使得分揀機器人和周圍環境裝置集成為一個功能單元。而人機交互系統是操作人員參與分揀機器人控制并與其進行溝通的樞紐,在最大程度上幫助人們實現信息管理、服務以及處理等功能,使計算機和人工智能真正成為人類學習與工作的一門技術科學[47]。控制系統是分揀機器人最為核心的組成之一,它對分揀機器人的性能起著決定性影響,在一定程度上推動著分揀機器人產業的發展。分揀機器人內部的協調以及多臺分揀機器人協同作業都離不開控制系統。
機器視覺技術是一種采集、處理和分析真實世界中圖像和視頻的方法,將機器視覺技術引入分揀機器人,使機器能夠從物理世界中提取有意義的上下文信息,包括機器視覺識別、光學字符識別、圖像識別、模式識別、人臉識別、邊緣檢測和運動檢測等許多重要領域。對于不同物件,最明顯的特征就是它的“形狀”[48],故基于機器視覺的形狀識別技術在分揀過程中發揮著巨大作用,這種用于形狀識別的技術使得物件分揀工作更加精準高效,既能節省空間,又可提高物件出庫速度。將機器視覺技術用于分揀機器人產業鏈,使得分揀過程逐步朝著自動化分揀、智能化分揀的方向發展[49]。
2.2 分揀過程中的關鍵技術
攝像頭標定技術是降低相機采集圖像數據誤差的重要技術之一。攝像頭采集的信息要比人眼觀察的更為簡單,攝像頭光敏元件首先把接收到的光信號轉變為數字信號,再將其量化成數字矩陣[50]。攝像頭發布的圖像數據格式多種多樣,但無論是USB(universal serial bus)攝像頭還是RGBD(red+green+blue+depth map)攝像頭,數據格式基本可分為二維圖像數據和三維點云數據。攝像頭屬于對光學器件要求較高的精密儀器,圖像采集過程中可能會鑒于其內部或外部環境某些因素的影響,導致生成物件圖像產生畸變[51]。為排除數據源對最后結果產生的誤差,必須在圖像采集前對攝像頭參數進行標定[52]。
傳統標定技術需要攝像頭拍攝一個三維標定靶,而較新的標定技術僅需要一些平面靶標,如布蓋的MATLAB標定工具箱和張正友標定等[53]。本文中展示了棋盤格圖案的標定靶,并根據使用的攝像頭和標定靶棋盤格尺寸,相應修改了size、square、image和camera等參數。為提高標定的準確性,標定靶應出現于攝像頭視野范圍內的各個領域,界面右上角的進度條會提示標定進度,如圖3所示。
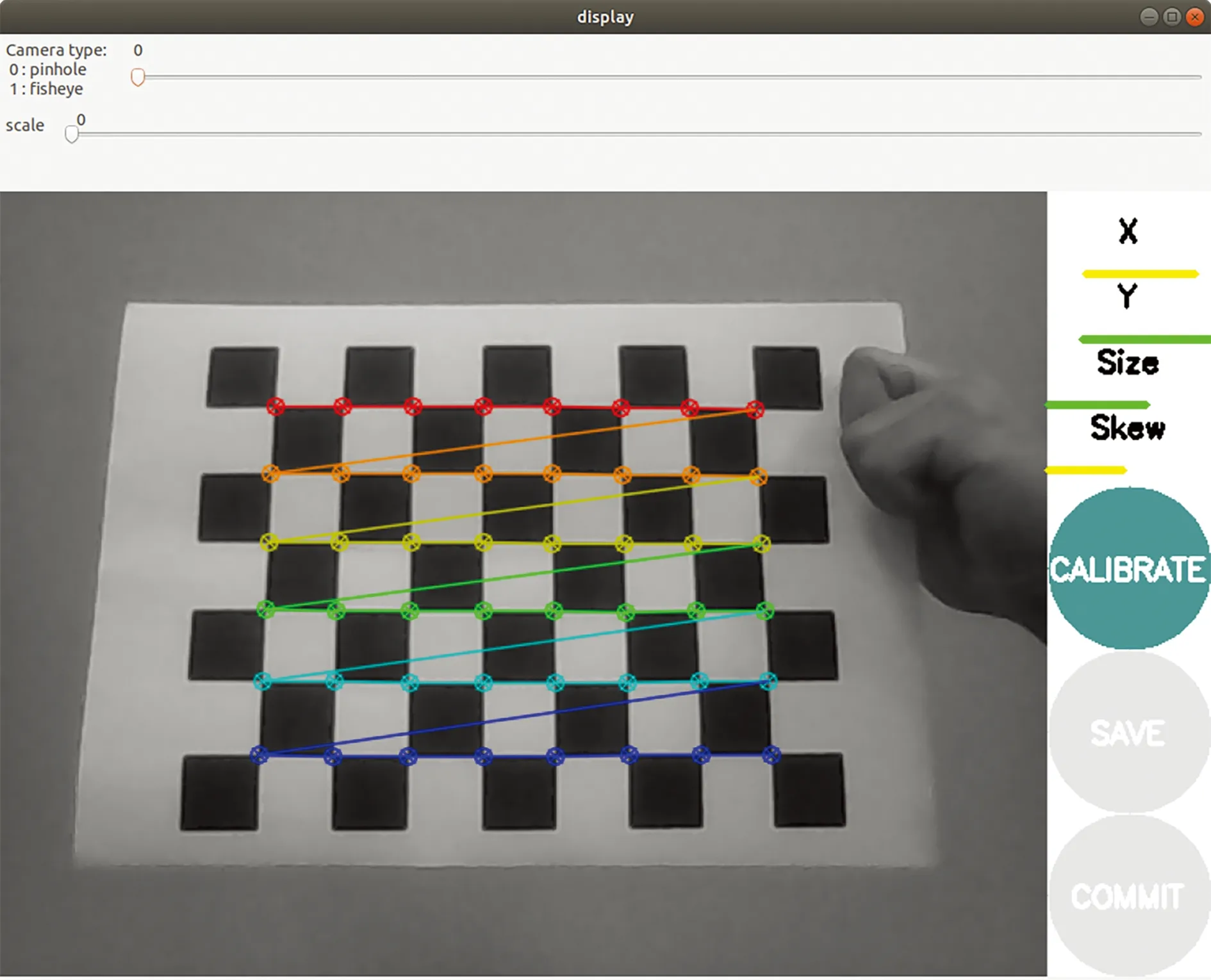
圖3 攝像頭標定程序
通過在相機視野中不斷上下、左右、前后、旋轉以及傾斜地移動標定靶,直到標定程序的參數采集結束即可點擊完成[54]。通過采集的數據可確定空間物件輪廓上某一點的三維幾何位置和它在圖像中相應點之間的彼此聯系,建立攝像機成像的幾何模型,獲得幾何模型的對應參數即是所需要的攝像機參數[55]。
完成攝像頭標定后,物體的識別與跟蹤就能夠進行了[56]。物體跟蹤和識別都用到了特征點檢測手段,雖有類似之處,但側重點不同[57]。物體識別針對對象包含靜態和動態,依據檢測對象特征點作為識別的數據依據[58];物體跟蹤的側重點是對檢測對象位置的精準定位,輸入的圖像通常需要具備動態特征。
物體識別屬于機器視覺技術中重要且經典的問題。物體識別站在人類的角度來看似乎非常簡單,人眼可以很輕松地感知圖片上不同顏色、紋理、大小以及位置,從而精準地識別目標物體。但計算機得到的是機器視覺系統采集提供的RGB(red+green+blue)像素矩陣,想要從圖像中直接獲得比較抽象的物體并對其定位是相當困難的。再者,物體不斷變化的姿態混合了周圍復雜的環境背景,這會讓物體的識別難度大增[59]。從2001年Viola等[60]提出基于Adaboost的人臉檢測方法至今,物體檢測算法經歷了傳統的人工設計特征結合淺層分類器的架構,到基于大數據與深度神經網絡的End-To-End物體檢測架構,物體識別技術逐步成熟。
TensorFlow[61]是一個用于人工智能的開源神器,其采用數據流圖,與ROS(robot operating system)結合可實現物體的識別與跟蹤。如圖4所示是基于TensorFlow Object Detection API結合ROS實現的物體識別效果,圖4中所示物體均能被較好地識別并定位。

圖4 目標物體識別效果圖
通過ROS獲得攝像頭動態圖像數據,再經過圖像處理,使用cv_brideg將ROS中的圖像消息轉換成TensorFlow Object Detection API所需要使用的圖像格式;然后開始圖像識別,并且將識別到的物體用矩形框標注出來;再轉變為ROS中的Image message進行發布,提供給ROS中的訂閱者subscri-ber[62]。圖像中的杯子、瓶子和手機都被非常準確地識別了出來,并且標注了其所在位置和識別概率。
3 分揀機器人的應用現狀
基于機器視覺技術的分揀機器人可以將工人從繁重的勞動中解放出來,大大提高了分揀的效率,因此被廣泛地應用于食品、物流以及煤礦等多個行業。
3.1 分揀機器人在水果分揀中的應用
隨著農業科技的發展和人民生活水平的提高,水果品種越來越多,人們對水果的品質也有了更高的要求。人工分揀勞動量大、生產率低而且分揀精度不穩定,因此水果分揀的快速、準確和無損化成為亟需解決的問題。
基于機器視覺技術的水果分揀機器人采用非接觸式的圖像傳感器,因此不會對水果造成損傷,可適用于多種類型水果的分揀。Sofu等[63]設計的蘋果自動分揀與品質檢驗體系,集成了圖像處理以及曲線擬合軟件,使得分揀過程準確率逼近96%。基于機器視覺技術的水果分揀機器人不僅能夠檢測水果的大小和形狀,還能對水果外表的損傷進行分析[64]。如圖5所示[65],根據水果顏色這個外觀特征能夠間接判斷其內部品質,如使用近紅外光的品質檢測法精確測定水果的糖度和酸度,而且檢測過程十分迅速。

圖5 水果分揀機器人[65]
3.2 分揀機器人在物流分揀中的應用
近些年電子商務行業快速增長,中國每天有超過1億個快遞包裹,而且中國快遞行業還在高速發展,規模不斷擴大。物流業是對人力成本非常敏感的產業,同時機器視覺技術具有高度自動化、高效率、高精度和環境適應強等優點,為高速發展的物流分揀系統開啟了“新視界”。物流行業正從原始的人工分揀向模塊化、智能化以及自動化方向快速演進。
極智嘉(Geek+)[66]是一家專注于智慧物流的AI機器人公司,通過融合機器視覺技術與人工智能相關技術來完成高度柔性以及智能物流自動化的解決方案,被稱為“機器人智能物流專家”,其生產的物流分揀機器人以穩定魯棒、性能優異以及安全可靠等優點深受顧客青睞。
基于機器視覺技術的物流分揀機器人可以將貨物從目標位置快速且準確地搬運到指定的位置,所有的作業均是按照指令自動完成,其間不會受到氣候、時間和體力的限制,真正實現了貨物的連續大規模分揀。在準確性方面,先進的機器視覺技術可以自動識別并判斷商品的條形碼、尺寸、重量和形狀,分揀錯誤率極低。分揀車間實現了極少數人輔助分揀甚至無人分揀,大大降低了企業的人力成本投入,同時也降低了企業員工的勞動強度,提高了人員的使用效率。深圳路輝物流設備有限公司在物流行業很具有代表性,是一家聚焦智能分流領域的國家高新企業,其使用滾珠模組帶分揀系統和高速分流器實現智能分揀,分揀效率極高,達到了1萬件/h,而且分揀準確率達到了 99.99%。因此,其被廣泛應用于電商與快遞物流行業。安徽省一通研發的高速環形交叉帶分揀系統,實測分揀效率高達 2.3萬件/h,而且分揀準確率高達 99.99%,廣泛應用于郵政快遞、跨境電商、海關等行業。
3.3 分揀機器人在食品分揀中的應用
隨著人們越來越關注食品的質量和健康,食品行業面臨著越來越多的產品篩選和工作,手工分揀存在速度慢、準確性差、不衛生以及勞動力成本高等問題。基于機器視覺技術的智能分揀機器人為食品制造商帶來了更多的智能選擇,這有助于節省勞動力、提高效率和產品質量,同時人工智能也帶來了更大的靈活性。
食品分揀機器人主要是由一個基于機器視覺技術的圖像識別系統和一個多功能機械手組合而成。在食品分揀生產線上,最普遍的是選用Eye-to-Hand[67]的方式來實現運動食品的抓取。為了使機械手能夠精確且穩定地抓取、搬運食品,最常用的是基于位置的機器視覺控制技術。機器視覺系統的識別以及定位是通過對食品的邊緣、形狀以及顏色等進行特征檢測,最終引導分揀機器人實現對應的抓取和搬運工作[68]。近年來,隨著機器視覺技術的高速成長,基于機器視覺技術的食品分揀機器人的分揀過程越來越高效[69]。同時SCARA(selective compliance assembly robot arm)機器人得益于其負載小、速度快,因此常常被作為分揀機器人的載體,廣泛應用于食品分揀行業。同時,并聯分揀機器人也被廣泛應用于食品分揀行業,通常是四軸和六軸并聯機器人,即所謂的蜘蛛手,主要應用于巧克力、餅干、面包等食品生產線,如圖6所示[70]。
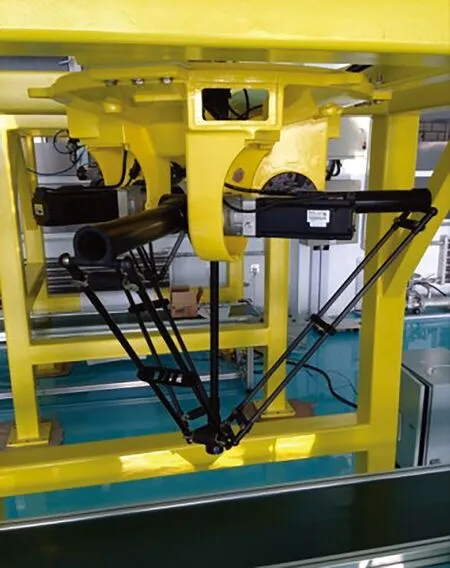
圖6 并聯食品分揀機器人[70]
3.4 分揀機器人在煤炭分揀中的應用
在中國的化石能源中,富煤、貧油、少氣是最基本的特征,這決定了煤炭在中國化石能源使用中所居的關鍵位置[71]。在煤炭生產中,煤炭分揀過程環境十分惡劣:一成不變的體力勞動,揚起的灰塵,轟隆隆的機器聲音,濃烈的有害氣體味道。由于環境的惡劣,人工分揀不僅傷害工人的健康,而且生產效率低且成本也高。隨著社會發展和科技進步,基于PLC(programmable logic controller)的分揀設備應運而生,但其在分揀過程中穩定性得不到保障,因此可靠性差,不適合大批量投入使用。近年來,基于機器視覺技術的分揀機器人漸漸步入煤炭行業。因其具有成本低、效率高、穩定性好而且非常智能等特點,被廣泛應用于煤炭分揀過程中。
在人工智能發展突飛猛進的今天,智能煤矸石分揀系統很快被研發出來,其運用人工智能深度學習技術,通過對海量的矸石和煤炭圖片進行人工標注矸石和煤炭特征,運用Faster R-CNN[72]算法,以基于機器視覺技術的分揀機器人為載體,可快速且準確識別皮帶上的煤炭和矸石,并通過智能中央控制系統指揮機器人末端執行器進行準確分揀。通過機器視覺技術、深度學習與人工智能算法的融合,分揀精準且高效,煤炭和矸石識別率高達 98%,同時分揀后煤帶矸石率小于 2%。隨著機器視覺技術的發展和人工智能算法的優化,分揀的準確率將達到 100%且大大降低分揀時間。
基于機器視覺技術的分揀機器人應用于煤炭行業,大大降低了煤炭分揀過程的一系列成本,減少了安全事故的發生,為實現煤炭開采的智能化升級改造、智慧礦山和綠色礦山奠定了堅實的基礎。
4 結論與展望
機器視覺技術是分揀機器人領域的一項重要技術,其拓展了分揀機器人的研究方向和應用領域,基于機器視覺技術的分揀機器人被廣泛應用于食品、煤炭、物流、電子制造以及汽車制造等行業。機器視覺技術的發展一方面得益于計算機和相機性能的提升,另一方面也離不開核心算法的優化和創新。機器視覺技術的發展使得基于機器視覺技術的分揀機器人工作更加高效、更加智能和更加人性化。本文中從機器視覺技術的角度對分揀機器人的組成和關鍵技術進行了介紹,剖析了機器視覺技術未來可能的研究方向,最后梳理了基于機器視覺技術的分揀機器人在多個領域中的應用現狀。
雖然基于機器視覺技術的分揀機器人在各行業得到了廣泛應用,但在具體實施過程中仍存在以下問題和挑戰。
(1)在實際分揀過程中,由于待分揀物體的形狀和材質不固定,機器視覺系統需要處理的信息多且復雜。現有的機器視覺算法識別過程耗時長,難以實現精準高效分揀的目標。因此,亟需設計一種新的機器視覺算法來提升特征提取能力、特征選擇能力以及特征分類能力,使得高效精準分揀成為現實。
(2)嵌入式機器視覺系統是先進的計算機技術、半導體技術、電子技術相結合后在各個行業具體應用的產物,其可以達到實時視覺圖像采集與視覺圖像處理控制的效果,且對于一些特定的分揀場合,可以不使用高端計算機。使用嵌入式機器視覺系統可以使分揀機器人結構更緊湊,在降低成本的同時也減小了功耗。因此,把嵌入式機器視覺系統融入分揀機器人是未來的重點研究方向。
(3)分揀機器人并沒有像人類一樣敏銳的視覺,且現有的機器視覺算法受環境影響很大,單一的機器視覺很難適用于復雜的分揀場景。因此,給分揀機器人配備多個不同類型傳感器,將來自多傳感器或多源的信息和數據按照一定的準則進行自動分析和綜合,讓分揀機器人能夠靈活感知環境并完成物體識別、精準定位、自由抓取是現階段的首要任務。但是,目前尚未建立統一的融合理論和有效廣義融合模型及算法,對數據融合的具體方法研究也尚處于初步階段。因此,建立統一的融合理論、數據融合的體系結構和廣義融合模型,將人工智能技術與大數據引入到數據融合領域以提高多傳感融合的性能,并構建數據融合測試評估平臺和多傳感器管理體系是未來的重點研究方向。
(4)在分揀行業,機器視覺已經幾乎成為標配,但在具體應用上,卻往往還是采用傳統機器視覺算法,加入人工智能的機器視覺算法仍然應用較少。用“人工智能+機器視覺”來做機器識別,優勢非常明顯,可大大增加分揀過程的柔性,在不同的位置、光照以及復雜環境下,能夠呈現出更好的適應性。但準確率一直制約著人工智能應用的發展,目前大多數人工智能算法都難以達到較高的準確率,誤差率只能控制在15%左右。因此,提高人工智能算法的準確率是未來研究的重點和難點。
(5)在人工智能大數據時代背景下誕生的5G具有高速率、低時延及大連接等特點。與5G深度融合的深度學習算法將機器視覺的效率和魯棒性和人類視覺的靈活性相結合,結合后的機器視覺分揀系統不僅具備在復雜環境中檢測的能力,而且在實時性方面也得到了很大改善。深度融合5G和深度學習的機器視覺將使高分辨率圖像的機器視覺分揀系統、多分揀機器人協作作業成為可能,同時也能加速智慧分揀工廠的建設,為打造未來超級工廠提供了思路。
猜你喜歡
西安航空學院學報(2022年2期)2022-07-04 07:45:42
汽車零部件(2020年3期)2020-03-27 05:30:20
表面工程與再制造(2019年1期)2019-05-11 08:52:04
商界(2019年12期)2019-01-03 06:59:05
家庭影院技術(2018年9期)2018-11-02 05:31:34
IT經理世界(2018年20期)2018-10-24 02:38:24
通信電源技術(2018年3期)2018-06-26 06:33:30
軍營文化天地(2018年1期)2018-02-10 05:19:25
小康(2017年16期)2017-06-07 09:00:59
學與玩(2017年12期)2017-02-16 06:51:12