最優速度跟蹤控制策略在地鐵ATO 系統中的應用研究
2022-02-24 04:15:46任培勇
現代城市軌道交通 2022年1期
關鍵詞:控制策略
任培勇
(南京恩瑞特實業有限公司,江蘇南京 211106)
1 背景
近年來,地鐵列車自動運行系統(ATO)主要采用預測PID控制算法,此控制算法是在2009年方忠提出帶死區的PID控制算法的基礎上延伸發展而來,在地鐵ATO系統中得到了廣泛應用。
該算法是一種線性預測控制算法,在控制過程中可根據預測速度計算速度偏差,并對偏差實時按比例(Proportional)、積分(Integral)和微分(Differential)進行閉環控制,最終使列車的速度達到期望的運行速度。這種控制策略基本可以滿足應用要求,但卻存在明顯的缺點:只對速度偏差和加速度的變化(沖擊率)進行了定量控制和限制,并沒有考慮地鐵列車本身的滯后性、不同工況下控制參數的適應性以及速度跟蹤時速度的偏差大小。
本文在預測PID控制算法的基礎上,充分考慮各種因素的影響,對既有控制算法進行了調整和優化,以保證ATO系統在列車速度跟蹤時的速度高精度貼合期望速度,并在軌道交通行業中推廣應用。
2 預測PID控制算法
預測PID控制算法的原理如圖1所示。在PID控制器中,Kp、Ki、Kd分別為比例、積分、微分系數。Kp的作用是加快調節、減少穩態誤差,缺點是使系統穩定性下降;Ki的作用是減少穩態誤差、提高無差度,缺點是使系統動態響應變慢;Kd的作用減少超調、減少調節時間,缺點是對系統抗干擾不利。
預測PID控制系統原理框圖如圖2所示。圖2中,r(t)是目標值,計算時采用正值( + );e(t)為給定值與實際輸出值構成的偏差,同時也作為PID控制器的輸入值;u(t)為PID控制器的輸出值和被控對象的輸入值;y(t)是系統的實際輸出值,計算時采用負值( - )。 相關參數之間的計算表達式為:
由于計算機控制采用采樣控制,只能根據采樣時刻的偏差計算控制量,而不能進行連續控制,通過離散化處理后得到如下PID表達式:
式(2)~式(4)中,k為采樣序列,k= 0,1,2,……;U(k)為第k次采樣時刻計算機的輸出值;e(k)為第k次采樣時刻輸入的偏差值;Kp、Ki、Kd分別為比例、積分、微分系數;T為采樣周期;Ti為積分時間常數;Td為微分時間常數。
如果采樣周期足夠小,則式(2)的近似計算可以獲得足夠精確的結果,離散控制過程與連續過程十分接近。
應用了預測PID控制算法后,地鐵列車中ATO系統在速度跟蹤時的運行速度曲線如圖3所示。
從當前控制曲線中,明顯可以看出以下缺點:
(1)隨著附加加速度的作用,列車速度逐漸偏離期望速度,在經過一段時間的調整后列車速度才接近期望速度值;
(2)進入穩態時牽引制動來回切換導致速度發生了一定的振蕩;
(3)進入穩態后列車速度與期望速度仍存在一定的偏差。
導致控制曲線不理想的原因包括以下幾個方面。
(1)PID控制器的微分參數配置不理想。地鐵列車是存在較大滯后的系統,因此會導致閉環控制系統發生振蕩,PID控制其中的微分項能預測列車速度的變化趨勢,這種預測的作用在一定程度上可以消除系統滯后因素的影響,使超調量減小,增加系統的穩定性。但對于諸如地鐵列車類具有較大滯后特性的被控對象,如果微分項配置不理想,則不僅無法改善系統在調節過程中的動態特性,還會增加系統對干擾噪聲的敏感度,使系統抑制干擾的能力降低,同時使系統產生振蕩。
(2)PID控制器的積分參數配置不理想。進入穩態后列車速度與期望速度仍存在一定的偏差,但尚在控制范圍內,這一點充分證實了積分參數消除了一定的靜態偏差,但由于積分參數設置不理想,產生了逆向的控制效果,使得靜態偏差增大。
(3)缺少死區控制策略。進入穩態時速度控制的頻繁調整會導致控制發生振蕩。
(4)缺少附加擾動控制。在線路中存在大坡道時,列車運行速度會因為坡道的擾動逐漸偏離期望速度。
3 控制算法的調整及優化
3.1 控制器參數調整
結合PID控制器參數的校正作用,針對第2章節中指出的控制缺點(1),對控制器的參數做如下調整:
式(5)中,Ki'為調整后的積分系數。通過對Ki'進行調整,可適當減小穩態誤差,提高速度跟蹤的精準度。通過適當增大調節時間,減小速度調整的頻度,提高舒適性(結合系統的大滯后特性,將Kd由1.5調整為0)。
對控制器的參數進行調整后,ATO系統在速度跟蹤時的運行速度曲線如圖4所示。
從當前控制曲線可以看出,在預測PID控制算法的基礎上,控制器參數調整后:穩態誤差明顯減小,速度跟蹤的精準度明顯提高;調節時間略有增大,速度調整頻度明顯減小。
3.2 加入死區控制策略
圖4中的控制曲線仍不理想,具體表現為:進入穩態時牽引制動來回切換導致速度發生了一定的振蕩,由此可知列車牽引制動系統對頻繁切換工況有一定的響應約束,使系統進入不可控振蕩狀態。
針對第2章節中的控制缺點(2),在控制器中加入死區控制策略,以避免進入穩態時速度頻繁調整發生振蕩,在預測PID控制中加入死區控制后如圖5所示。死區控制的原理如下:
(1)當前是牽引狀態,當控制器計算的加速度計算值小于制動死區允許值(一般設定為-0.2 m/s2)時,控制狀態方可由牽引狀態切換為制動狀態;
(2)當前是制動狀態,當控制器計算的加速度計算值大于牽引死區允許值(一般設定為0.3 m/s2)時,控制狀態方可由制動狀態切換為牽引狀態。
控制原理及流程如圖 6所示。加入死區控制后,ATO系統在速度跟蹤時的運行速度曲線如圖7所示。
從當前控制曲線可以看出,在預測PID控制算法的基礎上,調整控制器參數,并加入死區控制后:進入穩態時牽引制動不再來回切換,速度調整明顯不再振蕩。
3.3 加入附加擾動控制策略
圖7中的控制曲線仍不理想,具體表現為:列車進入穩態前隨著附加加速度的作用,列車速度逐漸偏離期望速度,在經過一段時間的調整后列車速度才接近期望速度值,通過分析可知此時由于死區的作用,列車切換牽引制動的頻度減小(即使速度偏離,但控制量未超過死區界限時則不切換牽引制動工況),切換前列車的控制輸出會因為附加擾動的作用朝一個方向持續作用,此處的擾動為線路阻力加速度(大下坡)。
針對第2章節中的控制缺點(3),在控制器中加入擾動控制策略,避免線路中存在大坡道時,列車速度偏離期望速度的現象發生,在預測PID控制中加入死區控制和附加擾動控制后如圖8所示。附加擾動控制的原理如下。
(1)當前是牽引狀態。控制器計算的加速度計算值不小于制動死區允許值(一般設定為-0.2 m/s2),但此處的附加加速度(一般由大下坡產生)大于擾動加速度(一般設定為0.08 m/s2),此時控制狀態可由牽引狀態切換為制動狀態,同時輸出的加速度設定為-0.08 m/s2。
(2)當前是制動狀態。控制器計算的加速度計算值不大于牽引死區允許值(一般設定為0.3 m/s2),但此處的附加加速度(一般由大上坡產生)小于擾動加速度(一般設定為-0.1 m/s2),此時控制狀態可由制動狀態切換為牽引狀態,同時輸出的加速度設定為0.1 m/s2。
控制原理及流程如圖9所示。加入附加擾動控制后,ATO系統在速度跟蹤時的運行速度曲線如圖10所示。
從當前控制曲線可以看出,在預測PID控制算法的基礎上,調整控制器參數,并加入死區控制策略和附加擾動控制策略后:在列車速度接近期望速度后,即使有附加加速度的作用,列車速度也不會偏離期望速度,同時進入穩態后牽引制動不再頻繁切換。
與預測PID算法相比,調整后的控制策略對比如表 1所示。
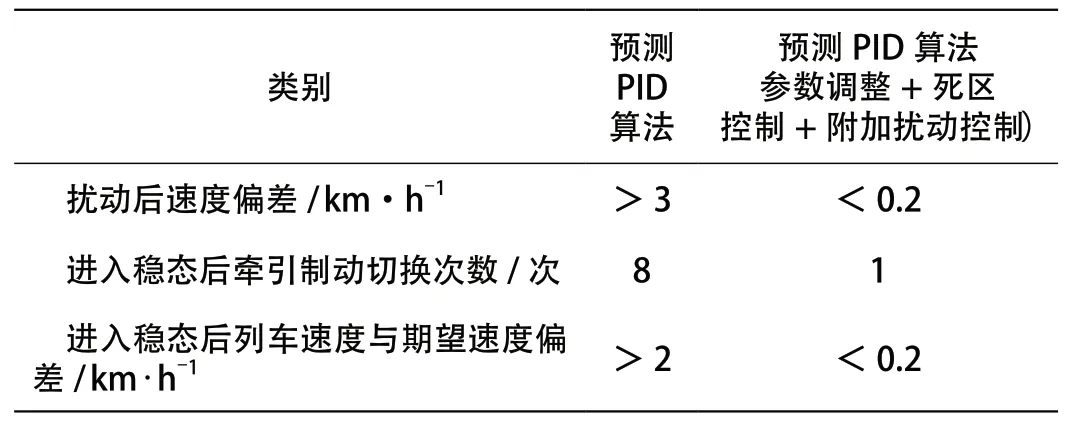
表1 預測PID算法與調整后的控制策略對比表
4 結論
本文提出的速度跟蹤控制策略,不僅滿足ATO系統的各項性能指標,而且具有顯著的控制優勢:明顯減小了穩態誤差,提高了速度跟蹤的精準度;明顯降低了速度調整頻度;列車速度接近期望速度后,即使有附加加速度的作用,列車速度也不會偏離期望速度。
此控制策略是在預測PID控制算法基礎上做出的調整和優化,在實際應用項目中,ATO系統控制的列車速度曲線與期望速度曲線高精度貼合(速度偏差小于0.2 km/h),不僅提高了地鐵運營的準點率,而且極大改善了乘車的舒適度。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36