基于最大Lyapunov指數(shù)Elman-決策樹的故障預警方法
2022-02-23 05:56:16黃海兵王衛(wèi)玉李崇仕陳啟卷
中國農(nóng)村水利水電 2022年2期
關鍵詞:故障
黃海兵,王衛(wèi)玉,2,李崇仕,2,侯 凱,2,鄭 陽,陳啟卷
(1.五凌電力有限公司,長沙410004;2.國家電力投資集團水電產(chǎn)業(yè)創(chuàng)新中心,長沙410004;3.武漢大學動力與機械學院,武漢430072)
0 引言
隨著機械設備故障診斷理論的不斷發(fā)展,傳統(tǒng)事后維修已無法滿足日益增長的工業(yè)狀態(tài)檢修需求。故障預警技術可通過歷史狀態(tài)數(shù)據(jù)建立相應的預測模型,對未來一段時間內(nèi)的狀態(tài)趨勢進行分析。常用的預測方法有基于統(tǒng)計模型的預測方法、基于物理模型的預測方法和基于數(shù)據(jù)驅動的預測方法,且主要包含三方面任務:①根據(jù)設備當前監(jiān)測信息建立時間序列模型,提取特征并預測該特征變化趨勢;②研究劣化評價方法,給出機組隨時間推移下的狀態(tài)劣化趨勢;③研究機組健康評價準則,根據(jù)機組不同部件的劣化水平對機組當前及未來的運行狀態(tài)進行評價,并給出維修決策及建議[1]。通常,故障預警面臨著以下三方面困境:①故障類型多且成因復雜,多類模式識別往往需要分別建立模型,預測準確性隨時間逐步降低;②研究對象往往為復雜耦合非線性系統(tǒng),需考慮結構、摩擦、環(huán)境、外載荷等因素,其運行狀態(tài)往往表現(xiàn)出明顯的非線性動力特性,傳統(tǒng)特征提取方法在處理非線性信號時具有局限性;③精確物理模型搭建難度較大[2]。
針對上述問題,中外學者提出可利用最大Lyapunov 指數(shù)反映系統(tǒng)在初始條件下微小變化導致的相空間軌道變化程度的特性進行機械故障診斷。Soleimani 通過分析齒輪箱信號[3]正常、各故障類型的最大Lyapunov 指數(shù)值,驗證了其區(qū)分故障類型的能力。趙賞鑫對滾動軸承信號[4]進行包絡降解及降噪處理,證明最大Lyapunov 指數(shù)可對故障劣化程度進行有效判斷。由此可見,最大Lyapunov 指數(shù)在度量短序列信號的復雜度時有較高的準確性,并能對故障類型進行準確的分類,可避免建立多類模型。但針對最大Lyapunov 指數(shù)在長序列信號計算效率較低、對噪聲敏感及該方法應用于故障預警的具體方法方面相關研究仍較少。
由此,本文提出基于最大Lyapunov指數(shù)的Elman-決策樹的故障預警方法。首先將長序列信號依據(jù)經(jīng)驗及實時性的要求分為較短序列信號,建立時間序列模型,以滿足后期預測的需求;并將文獻[5]中提出的抗中度隨機或異方差噪聲的最大李雅普諾夫指數(shù)計算方法應用于故障預警領域,通過測得包含噪聲的時序信號訓練前饋神經(jīng)網(wǎng)絡,重構系統(tǒng)數(shù)學表達式,其次計算該表達式的雅克比矩陣,進而得到最大李雅普諾夫函數(shù)作為故障預測提取的特征;利用Elman 神經(jīng)網(wǎng)絡能夠實現(xiàn)動態(tài)系統(tǒng)的映射并直接反應系統(tǒng)的動態(tài)特性,建立能夠內(nèi)部反饋、存儲和利用過去時刻輸出信息的模型,預測未來時刻的最大李雅普諾夫指數(shù),最后訓練決策樹模型進行分類。本文采用正常軸承、外環(huán)人工電火花加工出裂紋(滾壓方向0.25 mm、深度1~2 mm)、外環(huán)鉆孔(直徑0.9 mm)軸承的殼體振動信號時序數(shù)據(jù)[6]對上述方法進行了驗證,結果證明在故障類型較為簡單時該方法具有計算簡單、預測效果較好的優(yōu)勢,且證明了最大李雅普諾夫指數(shù)可作為故障預警時的劣化評價方法,其值的大小可對機組運行狀態(tài)進行有效評價,對故障種類進行較為精確的判斷。
1 抗噪聲的最大Lyapunov指數(shù)計算方法
最大Lyapunov 指數(shù)代表相空間相鄰軌跡的平均指數(shù)發(fā)散率的數(shù)值特征,是衡量動力學特性的一個重要定量指標[6]。當最大Lyapunov指數(shù)小于0時,系統(tǒng)的狀態(tài)隨著指數(shù)而趨近混沌,當大于0 時系統(tǒng)為混沌狀態(tài)。在故障診斷領域,已有學者提出該指數(shù)可用于故障分類[7],且隨著劣化程度而增加[8]。為克服其對噪聲敏感的特點,本文采用了Ahmed BenSa?d 提出的抗噪聲的最大Lyapunov指數(shù)計算方法,流程如下:
(1)由于測量誤差、噪聲和混沌映射難以確立,由測量時序數(shù)據(jù)建立混沌系統(tǒng)的精確物理模型難度極大。所以文獻[4]提出,可將一個標量時間序列{x}t擬合為xt=f(xt-L,xt-2L,...,xt-mL)形式,具體如式(1)所示。當參數(shù)選取得當時,該式即可通過前饋神經(jīng)網(wǎng)絡來擬合所有非線性函數(shù)。

式中:α0,α1,…,αj和β0,β1,…,βm,q代表需要訓練的兩組參數(shù)。[m,q,L]決定了擬合過程的復雜性和結果的準確性,參照文獻[9]設為[5,6,5]。
(2)根據(jù)式(1)得出的擬合結果計算雅可比矩陣,如式(2)所示。
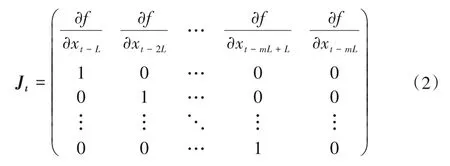
(3)最大Lyapunov系數(shù)可由式(3)得到。

式中:M=(length(X)-m*L)2/3,。
2 Elman神經(jīng)網(wǎng)絡
Elman 神經(jīng)網(wǎng)絡的結構由圖1所示,由輸入層、隱含層、承接層和輸出層構成,輸入層單元器信號傳輸作用,隱含層單元的激勵函數(shù)分為線性與非線性兩類,本文中選取Signmoid 非線性函數(shù)承接層可記憶前一時刻隱含層的輸出,可看作單步延時算子,輸出層單元起加權作用。Elman 神經(jīng)網(wǎng)絡本質上是一種遞歸神經(jīng)網(wǎng)絡,較BP 等前饋神經(jīng)網(wǎng)絡而言,Elman 神經(jīng)網(wǎng)絡增加了承接層,能自聯(lián)到隱含層的輸入。該自聯(lián)作用增強了Elman 神經(jīng)網(wǎng)絡對歷史數(shù)據(jù)的敏感性,增加了網(wǎng)絡對動態(tài)信息的出力能力,更能直接反應動態(tài)過程的時序特性,因此更適用于對具有時變特性的故障預警問題[10]。同時,它具有更強的計算能力和網(wǎng)絡全局穩(wěn)定性。
圖1中,y(t)、x(t)、xc(t)可表達為:
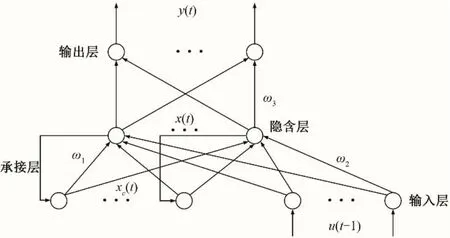
圖1 Elman神經(jīng)網(wǎng)絡結構示意圖Fig.1 Schematic diagram of Elman neural network structure


式中:y(t)為t時刻時m維輸出節(jié)點向量;x(t)為t時刻時n維隱含層節(jié)點單元向量;u(t-1)為t-1 時刻時r維輸入向量;xc(t)為n維反饋狀態(tài)向量;ω1為承接層到隱含層連接權值;ω2為輸入層到隱含層連接權值;ω3為輸入層到輸出層連接權值;g(x)為輸出層傳遞函數(shù),時常選為線性函數(shù)以疊加中間層輸出;f(x)為中間層傳遞函數(shù),選為Sigmoid函數(shù)。
Elman 網(wǎng)絡的預測流程如圖2所示。初始化載入并劃分數(shù)據(jù),構造樣本集和測試集合,同時進行歸一化以便于后續(xù)訓練網(wǎng)絡。構建Elman神經(jīng)網(wǎng)絡并初始化,隨機給定權值與閾值,載入訓練數(shù)據(jù),通過式(4)、(5)計算隱含層、輸出層的輸出值。隱含層輸出信號進入承接層,經(jīng)過延時與加權后重新反饋至隱含層。計算誤差函數(shù),利用方法傳播算法更新權值及閾值直至理想誤差范圍。

圖2 Elman神經(jīng)網(wǎng)絡預測流程圖Fig.2 Elman neural network prediction flow chart
3 決策樹模型
決策樹是根據(jù)已知的各種情況發(fā)生的概率,計算凈現(xiàn)值期望值大于等于零的概率,評估項目風險,判斷其可行性的一種決策分析方法,是一種直觀地應用概率分析的圖解方法。決策樹是一種樹形結構,其中每個內(nèi)部節(jié)點表示一個屬性上的測試,每個分支代表一個測試輸出,每個葉節(jié)點代表一種類別。
以訓練集為數(shù)據(jù)基礎,依據(jù)ID3算法完成特征選擇、決策樹生成和決策樹剪枝,形成最終的決策樹模型。對訓練集判斷矩陣進行預處理,劃分訓練集、測試集輸入輸出數(shù)據(jù),完成特征選擇、決策樹生成和決策樹剪枝。具體步驟如圖3所示:
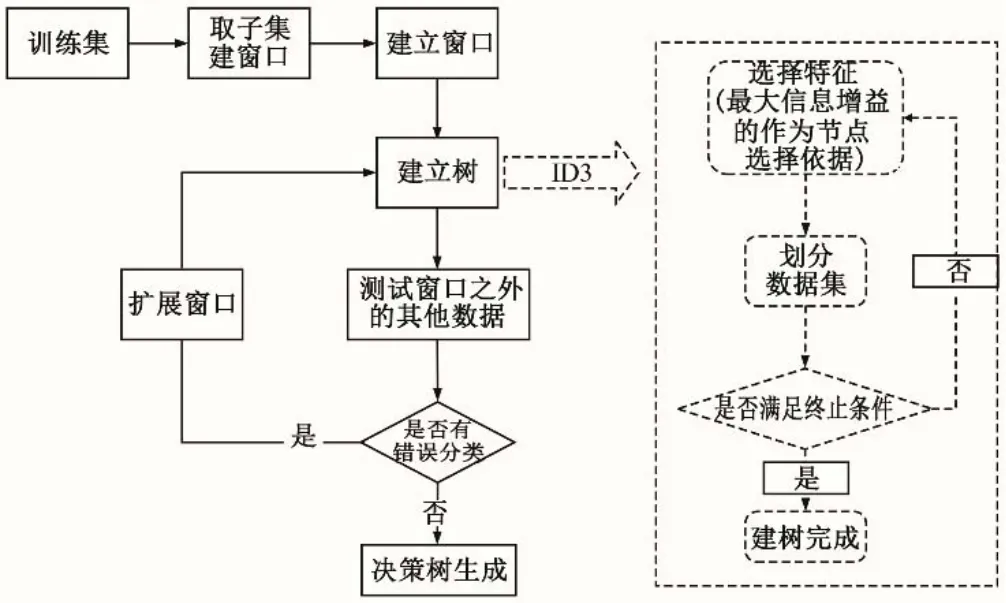
圖3 決策樹分類流程圖Fig.3 The flow chart of the classification process of Decision tree
(1)計算訓練集的經(jīng)驗熵H(S)。

式中:|S|代表總樣本容量,k為分類個數(shù),|Ck|代表屬于類Ck的樣本個數(shù),K=1,2,3,…。
(2)計算條件熵H(S|K)及信息增益g(S|K),以信息增益最高的特征為根節(jié)點。
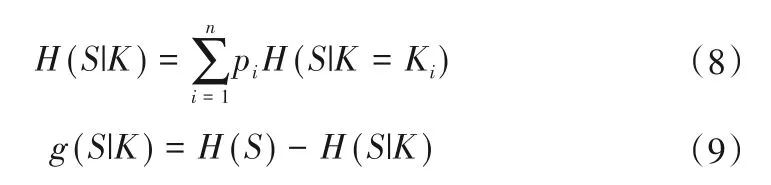
式中:pi為極大似然估計得到的概率。
(3)根節(jié)點分裂出子節(jié)點,進一步計算所有可能特征的信息增益。選取信息增益最大的特征作為節(jié)點的特征。遞歸地將上述方法調用到子節(jié)點以構造決策樹,直到所有特征的信息增益小于給定的閾值或沒有特征可供選擇為止,得到最終決策樹。
(4)對最終決策樹進行剪枝,建立決策樹學習損失函數(shù)Cα(T)以避免過擬合情況。計算每個節(jié)點決策樹學習損失系數(shù),遞歸回推,當損失系數(shù)最小時完成剪枝,得到最終的決策樹模型。

式中:T代表決策樹葉子節(jié)點;Nt代表第t個葉子所含訓練樣例個數(shù);Ht(T)代表第t個葉子的熵;α代表懲罰系數(shù)。
(5)訓練好的決策樹模型中,以振動區(qū)判斷值為輸出,將預測結果與測試集判斷矩陣中數(shù)據(jù)進行對比,得到預測正確率百分比。
4 實測數(shù)據(jù)分析驗證
4.1 研究對象
本文選取由帕德博恩大學發(fā)布的KAT 滾動軸承狀態(tài)監(jiān)測的基準數(shù)據(jù)集軸承故障試驗數(shù)據(jù)[5]進行預警方法驗證,采樣頻率為64 kHz。本文選取正常軸承、外環(huán)人工電火花加工出裂紋(滾壓方向0.25 mm、深度1~2 mm)、外環(huán)鉆孔(直徑0.9 mm)軸承各62 500 個殼體振動信號采樣點用于分析,圖4 例舉了前3 000個采樣點幅值信息,并對3組信號基本時域特征進行了簡要對比。
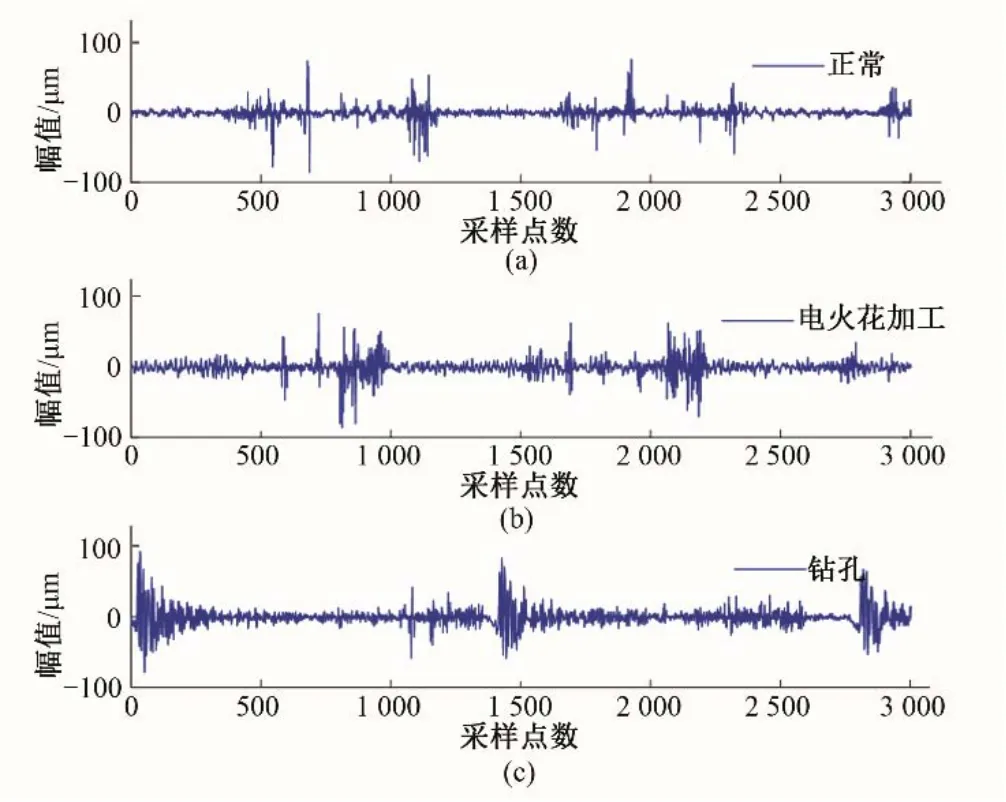
圖4 3種狀態(tài)下殼體的振動波形圖Fig.4 The time domain diagram of the vibration signal of the shell in 3 different fault states.
圖4(a)表征了正常軸承殼體振動,圖4(b)表征了外環(huán)人工電火花加工出裂紋(滾壓方向0.25 mm、深度1~2 mm)后軸承殼體振動,圖4(c)表征了外環(huán)鉆孔(直徑0.9 mm)后軸承殼體振動。當軸承無損壞時振動幅值較小,電火花加工、鉆孔后,幅值有較為明顯的增大,且鉆孔后軸承殼體出現(xiàn)了周期性沖擊現(xiàn)象。并且可從圖中可提取出均值、方差、峰值等信息,總體而言正常軸承數(shù)據(jù)均值絕對值即靜態(tài)分量稍小,為3.94 μm,而電火花加工、鉆孔后振動值均值依次增大,分別為5.58 μm、7.45 μm。但從信號離散度及最大波動程度而言,正常軸承數(shù)據(jù)也略微優(yōu)于故障數(shù)據(jù),三組數(shù)據(jù)的方差依次為:55.31、85.86、159.31 μm2,峰值依次為:162.47、161.70、171.46 μm。但正常與電火花加工后的軸承殼體振動數(shù)據(jù)峰值與均值均十分接近,所以需進一步提取特征以用于后續(xù)故障預警。
基于最大Lyapunov 指數(shù)的Elman-決策樹的故障預警方法具體步驟如下:
Step 1:為解決長序列最大Lyapunov 指數(shù)計算效率低的問題,本文將3組數(shù)據(jù)分別按每500個點分為125個短序列。
Step 2:將每組短數(shù)據(jù)帶入公式(1)~(3)計算最大Lyapunov指數(shù),按照時間順序形成波形,用于后續(xù)故障分析及預測。
Step 3:對3組數(shù)據(jù)計算得出的最大李雅普諾夫指數(shù)分別進行歸一化,并按照7:3的比例劃分訓練樣本與測試樣本,每組數(shù)據(jù)約88個訓練樣本及37個測試樣本。
Step 4:劃分訓練樣本與測試樣本的輸入、輸出數(shù)據(jù)集,劃分規(guī)則如下:將前6 個短序列的最大Lyapunov 指數(shù)作為Elman神經(jīng)網(wǎng)絡的輸入向量,第7 個短序列的最大Lyapunov 指數(shù)作為輸出向量,依次遞推。
Step 5:重復章節(jié)3 中的步驟對Elman 神經(jīng)網(wǎng)絡進行訓練,并預測后37個測試樣本的最大Lyapunov指數(shù),與測試集的真實輸出進行對比,得到準確率。
Step 6:決策樹訓練樣本選取方法與Elman 神經(jīng)網(wǎng)絡相同,同樣需要劃分訓練樣本與測試樣本的輸入、輸出數(shù)據(jù)集,劃分規(guī)則如下:每標簽相同的8 個最大李雅普諾夫指數(shù)作為一個輸入向量,輸出為對應的正常或故障編號,重復4中的步驟進行決策樹訓練
Step 7:以預測得出的最大Lyapunov 指數(shù)作為測試集輸入,真實故障作為輸出,檢驗決策樹準確率。
4.2 最大Lyapunov指數(shù)計算結果分析
圖5 為3 種狀態(tài)下短序列最大Lyapunov 指數(shù)對比圖,可分別通過分析振動信號時域波形圖能量大小與最大Lyapunov 指數(shù)的關系,分析將其作為故障預警特征的可行性。
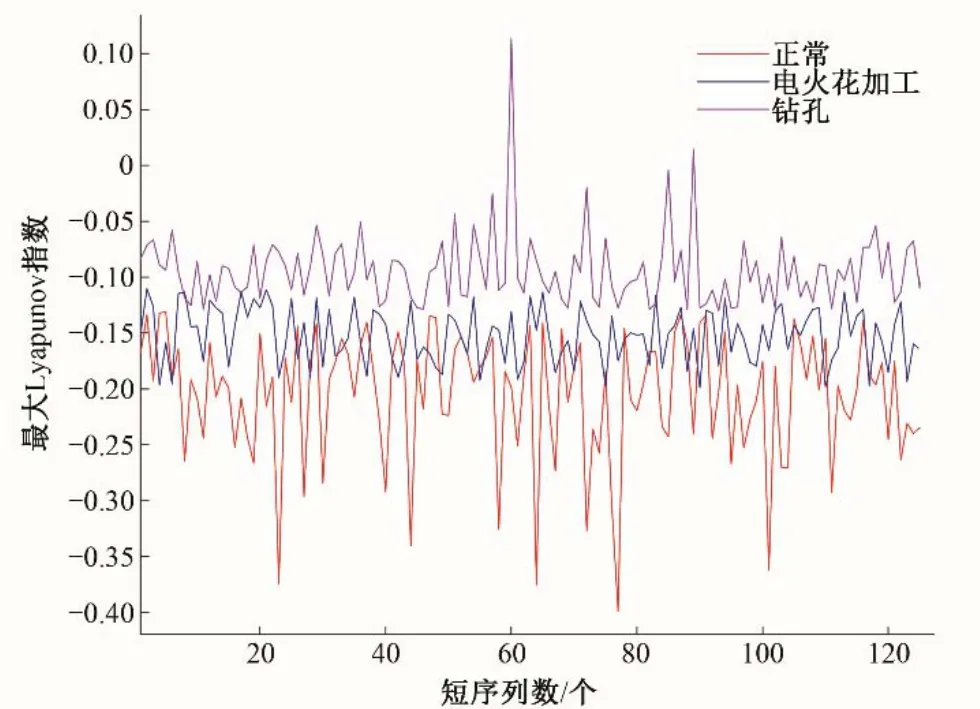
圖5 3種狀態(tài)下短序列最大Lyapunov指數(shù)對比圖Fig.5 The comparison of the maximum Lyapunov exponent in 3 different fault states
如圖所示,正常軸承最大Lyapunov 指數(shù)處于[-0.130,-0.398]區(qū)間,為三組數(shù)據(jù)中最小、最穩(wěn)定的一組,與時域波形靜態(tài)信息分析、動態(tài)信息分析及實際物理意義相符。外環(huán)電火花加工出裂紋軸承最大Lyapunov 指數(shù)值所處區(qū)間稍有增大,為[-0.110,-0.199]。外環(huán)鉆孔軸承最大Lyapunov 指數(shù)值所處區(qū)間最大,為[0.114,-0.130],且存在指數(shù)大于0的混沌現(xiàn)象,軸承運行狀態(tài)較前兩組更惡劣。總體而言,三組數(shù)據(jù)最大Lyapunov指數(shù)在工作狀態(tài)相同時特征具有一致性,且不同工作狀態(tài)下具有明顯差異,驗證了將其作為故障預警特征的可行性。
4.3 Elman-決策樹預測結果分析
首先,通過Elman 神經(jīng)網(wǎng)絡分別對3 種狀態(tài)下的最大Lyapunov指數(shù)進行預測,圖6~8依次為正常軸承、外環(huán)電火花加工出裂紋軸承及外環(huán)鉆孔軸承的預測結果圖。
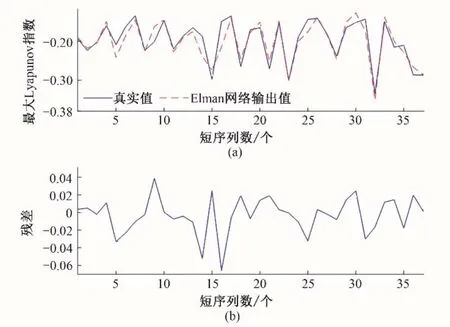
圖6 正常軸承數(shù)據(jù)預測結果圖Fig.6 The prediction result diagram of the normal functioning bearing
圖6(a)、圖7(a)、圖8(a)依次為正常軸承、電火花加工后軸承、鉆孔后軸承數(shù)據(jù)預測結果與真實值對比圖,圖6(b)、圖7(b)、圖8(b)依次為上述三組數(shù)據(jù)的預測結果殘差圖。由圖可見,3 組預測數(shù)據(jù)的最大殘差絕對值依次為:0.065 7,0.001 5,0.056 8,總體預測效果較好,且收斂速度遠高于傳統(tǒng)BP 神經(jīng)網(wǎng)絡。對比圖6~8可看出,三組預測數(shù)據(jù)所處區(qū)間與真實值相近,且彼此間有明顯區(qū)別。將預測數(shù)據(jù)分組后帶入決策樹訓練,分別對三組數(shù)據(jù)預警準確率進行分析,結果如圖9 及表1所示。外環(huán)電火花加工后的軸承數(shù)據(jù)與正常軸承數(shù)最大Lyapunov 指數(shù)范圍部分重疊,所以該類型分類效果精度略微下降,但總體分類效果較好。
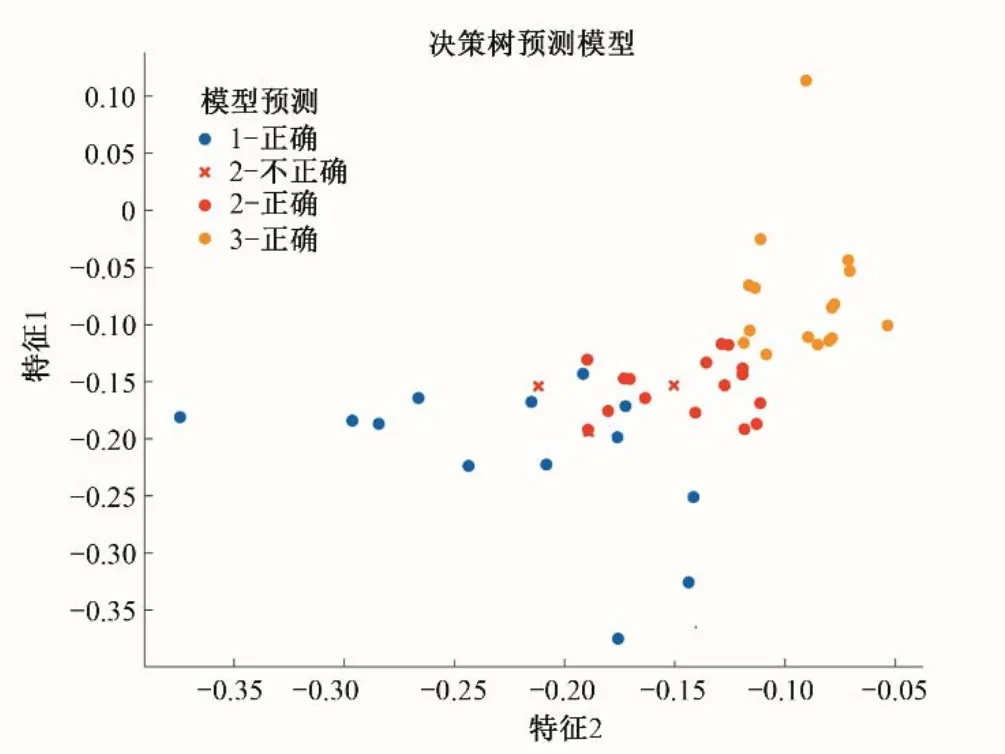
圖9 決策樹預測結果圖Fig.9 The prediction result diagram of the decision tree
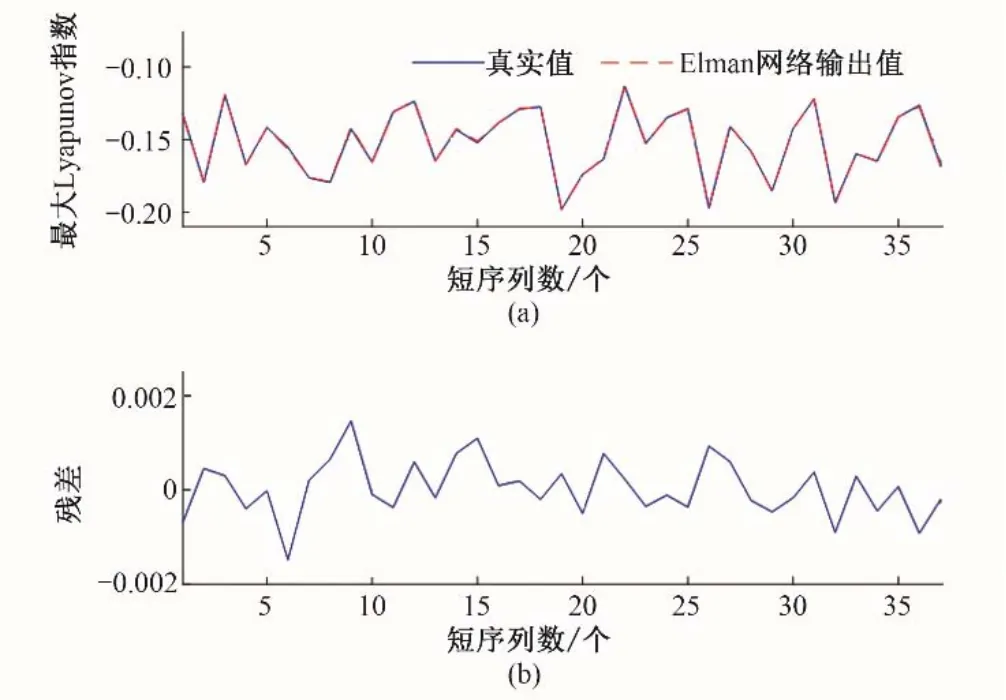
圖7 電火花加工軸承數(shù)據(jù)預測結果圖Fig.7 The prediction result diagram of theelectrical discharge machined bearing
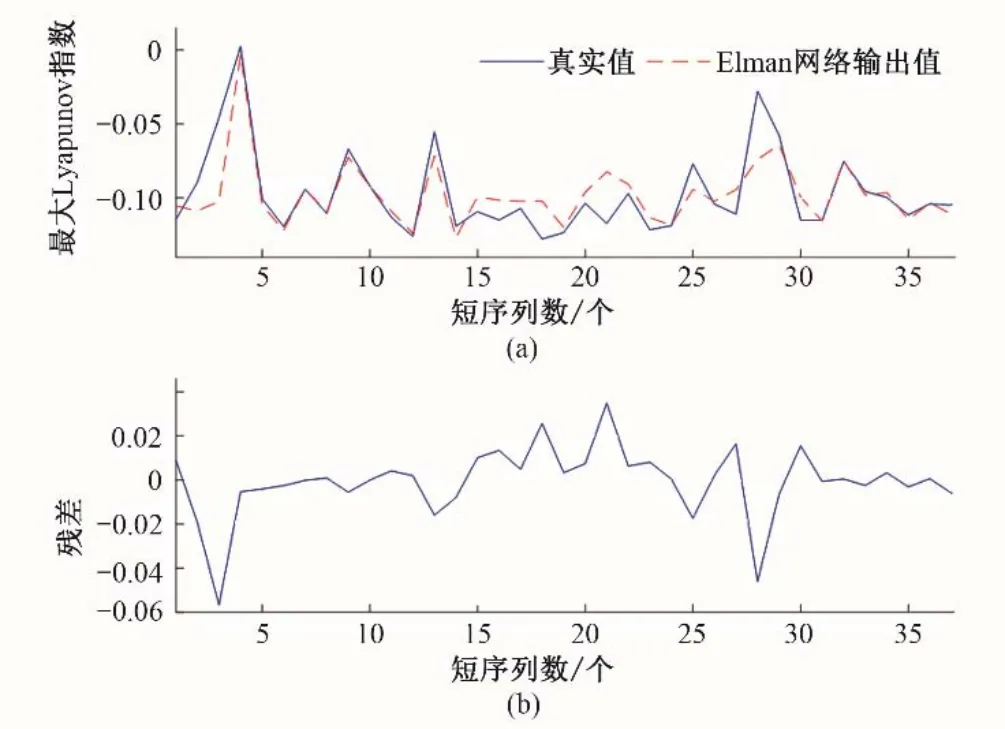
圖8 鉆孔軸承數(shù)據(jù)預測結果圖Fig.8 The prediction result diagram of the drilled bearing
同時設立BP-決策樹為對照組,對比BP 神經(jīng)網(wǎng)絡與Elman神經(jīng)網(wǎng)絡預測的最大殘差絕對值,可討論預測精度對最后分類的影響,圖10~12依次為正常軸承、外環(huán)電火花加工出裂紋軸承及外環(huán)鉆孔軸承的預測結果圖。
圖10(a)、圖11(a)、圖12(a)依次為正常軸承、電火花加工后軸承、鉆孔后軸承數(shù)據(jù)預測結果與真實值對比圖,圖10(b)、圖11(b)、圖12(b)依次為上述3 組數(shù)據(jù)的預測結果殘差圖。由圖可見,3 組預測數(shù)據(jù)的最大殘差絕對值依次為:0.071 7,0.034 5,0.058 43,可驗證Elman 神經(jīng)網(wǎng)絡因具有承接層作為一步延時的算子在反應動態(tài)過程中具有的優(yōu)勢。
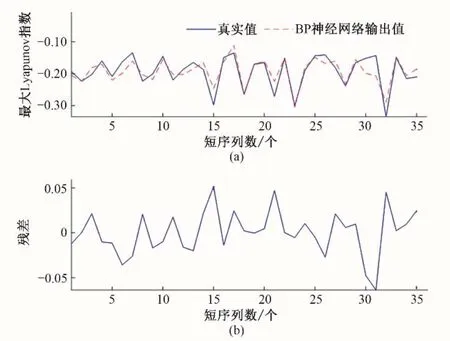
圖10 正常軸承數(shù)據(jù)預測結果圖Fig.10 The prediction result diagram of the normal functioning bearing
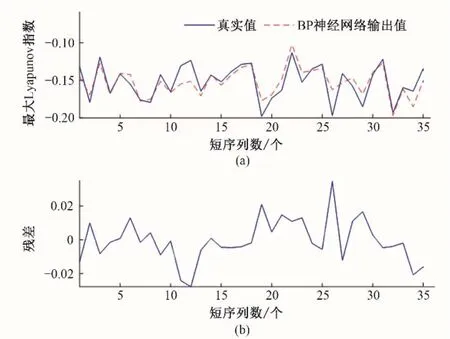
圖11 電火花加工軸承數(shù)據(jù)預測結果圖Fig.11 The prediction result diagram of theelectrical discharge machined bearing
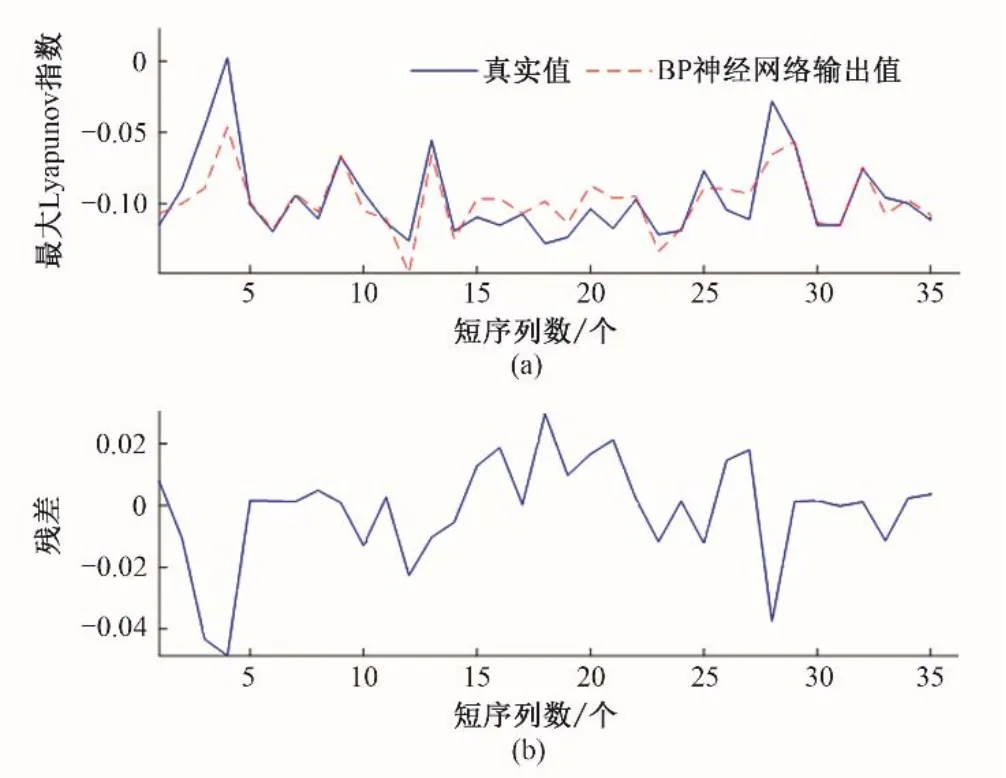
圖12 鉆孔軸承數(shù)據(jù)預測結果圖Fig.12 The prediction result diagram of the drilled bearing
為驗證Elman-決策樹方法組合的優(yōu)越性,表2例舉Elman-決策樹、BP-決策樹、Elman-SVM、BP-SVM、Elman-KNN、Elman-隨機森林對3 種狀態(tài)的預測分類結果,對比Elman-決策樹、BP-決策樹及Elman-SVM、BP-SVM兩組數(shù)據(jù)可見,Elman由于具有更高的預測精度,在狀態(tài)識別中分類精度也更高。對比Elman-決策樹、Elman-SVM、Elman-KNN、Elman-隨機森林分類精度可見,本文選取的Elman-決策樹分類精度最高,在本類案例中最為合適。
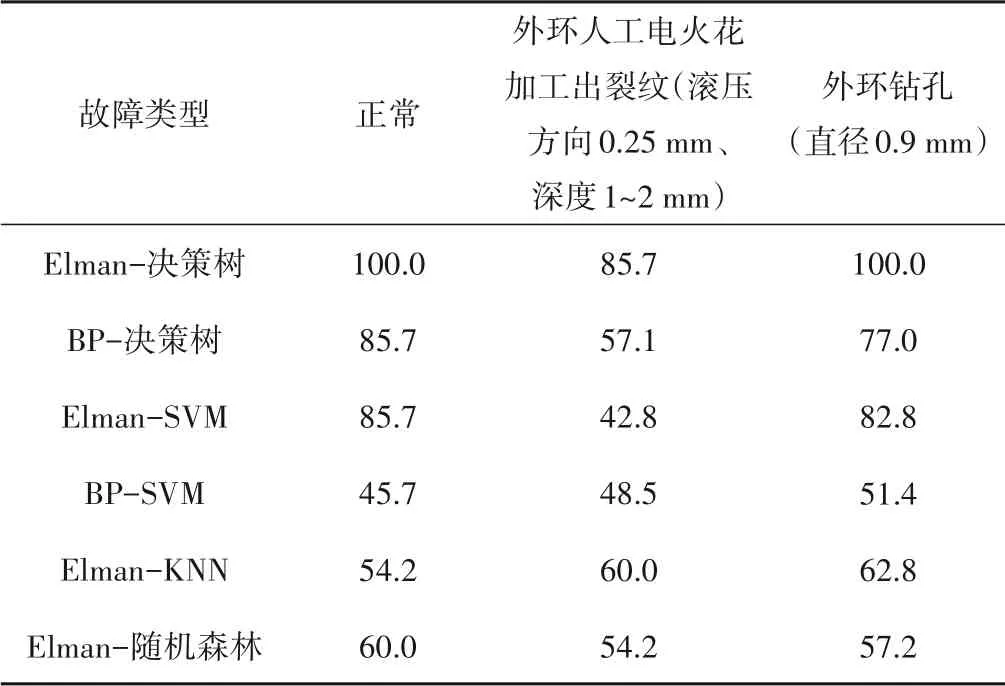
表2 各方法故障預警準確性結果 %Tab.2 Results of fault early warning accuracy for comparison
5 結論
本文提出了基于最大Lyapunov 指數(shù)的Elman-決策樹的故障預警方法,并用軸承數(shù)據(jù)對該方法進行了簡單驗證,分析結果表明:①最大Lyapunov 指數(shù)能體現(xiàn)不同故障的非線性動力特征,本文驗證了該預測方法對簡單的故障進行預測、分類的可行性;②若需處理更復雜的故障預警問題,需進一步提高數(shù)據(jù)量,并可將最大Lyapunov 指數(shù)作為故障特征的一種有效補充,本文可為故障預警提供一種新途徑。□
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年8期)2015-04-17 03:32:52
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年7期)2015-04-17 02:12:40
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
