航空發動機的軸承故障動力特征指紋提取方法研究
2022-02-21 08:32:40廣州民航職業技術學院飛機維修工程學院徐紅波葉寶玉
內江科技 2022年1期
◇廣州民航職業技術學院飛機維修工程學院 徐紅波 葉寶玉 劉 熊
航空發動機主軸軸承是航空發動機中的關鍵部件,其使用條件苛刻,長時間工作在高速、高溫的惡劣環境下,因而它是發動機最容易損傷的零件之一。主軸軸承損傷會導致發動機故障,嚴重威脅飛機的安全平穩飛行甚至造成更大的安全事故。故而,針對航空發動機主軸軸承進行故障評定方法研究,對于及時發現航空發動機主軸軸承缺陷,確保航空器的安全飛行具有重大意義。對航空發動機主軸軸承的狀態監測、評定及診斷,其關鍵、難點在于如何從軸承振動信號中提取出軸承的動力特征指紋信息。在某種程度上,動力特征指紋提取可以說是當前航空發動機主軸軸承故障評定與診斷研究中的瓶頸問題。
壓氣機、燃燒室、渦輪、進氣系統和排氣系統五個部分組成了航空發動機。這五個部分均通過軸承支撐,其中渦輪的主軸使用滾動軸承支撐。但是,作為航空發動機支撐單元的滾動軸承,長時間工作于高溫和高壓環境條件下,承受著高熱和劇烈振動,可以說軸承的額定工作壽命直接影響、決定著發動機的壽命。因此,非常有必要開展航空發動機主軸滾動軸承故障的診斷研究,尤其是基于滾動軸承振動信號的軸承故障動力特征指紋提取研究。
對于軸承故障,傳統的動力特征指紋提取方法是基于對振動信號進行時域和頻域分析,確定故障特征指紋提取方法。然而,由于負載、摩擦、間隙和剛度等非線性因素對振動信號的影響,僅在時域和頻域上對滾動軸承工作狀態進行精確動力特征指紋提取是比較困難的。實際測取的振動信號往往是非線性、非平穩信號,將極大地影響實際動力特征指紋的提取。因此,如何從非平穩的振動信號中提取出故障動力特征指紋信息是軸承故障評定、診斷的關鍵[1-4]。
1 EEMD
經驗模式分解(Empirical Mode Decom-position,EMD)是基于信號的局部特征時間尺度對實測信號進行分解,本質是對非平穩信號進行平穩化處理,把混雜的信號分解為有限個固有模態函數(Intrinsic Mode Function,IMF),并將信號中不同尺度的波動或趨勢逐級分解出來。EEMD算法則是預先在實測原始信號中加人白噪聲再進行EMD分解,其實質是一種噪聲輔助信號處理方法。EEMD借助白噪聲融合實測信號來構造信號在不同頻率尺度上時域的連續性,進而保證端點效應和模態混疊效應的處理。EEMD借助白噪聲均值為零的特性,對多次分解獲得的各IMF分量進行總體平均,最終消除白噪聲的影響。EEMD的具體流程如圖1所示。

圖1 EEMD流程
EEMD適用于非線性、非平穩信號。一個非平穩信號通過EEMD處理,可得到若干個平穩的本征模函數(IMF)。滾動軸承不同部位有缺陷時,在不同頻帶內的信號能量值會發生改變,由此可以通過計算不同振動信號的IMF能量熵,進而判斷軸承是否發生缺陷。
2 IPSO-LSSVM
2.1 LSSVM
支持向量機(Support Vector Machine,SVM)是一種較為主流的機器學習規則,它根據有限的樣本信息,在模型的復雜性和學習能力之間尋求最佳折衷,從而很好地解處理非線性、小樣本、高維數等實際問題。在SVM基礎上,Suykens和Vandewalle提出了最小二乘支持向量機(LSSVM),直接將二次規劃問題轉為線性方程問題,提升了問題處理的速度以及結果的收斂精度。然而,LSSVM的性能也依賴于學習模型的性能參數;如何確定學習機模型的最優結構參數,也一直是研究的熱點、難點。
2.2 IPSO
為了有效識別滾動軸承的缺陷、故障,本文提出在IMF能量熵構架下改進粒子群優化的最小二乘支持向量機(IPSOLSSVM)的故障特征動力指紋提取方法。基本流程是:首先利用EEMD對實測非平穩信號進行分解,構建IMF能量熵指標;然后,在IMF能量熵指標基礎上,引入改進的粒子群算法(IPSO),用于搜索最小二乘支持向量機(LSSVM)分類算法的最優參數,最后根據LSSVM最優工程模型進行回歸計算判斷滾動軸承的工作狀態和缺陷類型。改進粒子群算法步驟見表1。
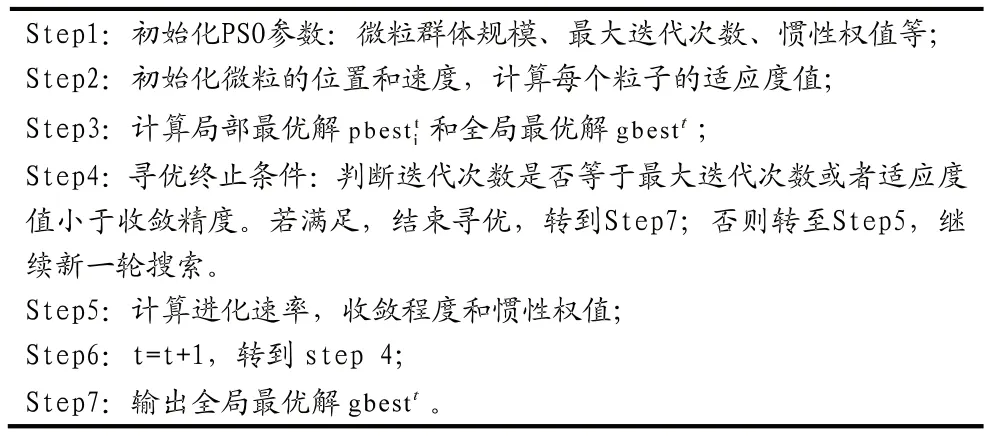
表1 改進粒子群方法步驟
2.3 改進PSO的LSSVM模型參數優化
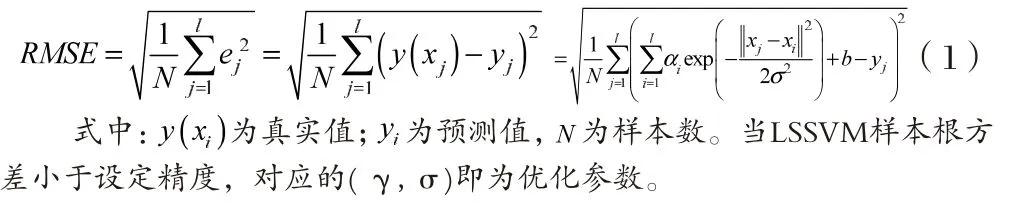
對于LSSVM的回歸函數估計,正則化參數γ、核函數參數σ的選取對模型建立有非常重要的作用。為得到具有較好預測能力的數學模型,必須對上述參數進行優化計算。對需要優化的參數(γ,σ),本文使用改進PSO計算正則化參數γ和核函數參數σ,并依據根標準差(RMSE)進行模型性能評估。同時,將RMSE作為改進PSO算法的目標函數:
3 故障動力特征指紋提取
當滾動軸承發生不同類型的缺陷時,會激起相應的固有頻率,此時故障振動信號的能量會隨頻率的分布情況產生變化。選擇各個IMF的能量熵作為最小二乘支持向量機的特征動力指紋。
(1)信號分解:對實測振動信號進行EEMD分解,由主成分分析法確定包含主要故障信息的前m個IMF分量,并按圖2進行特征動力指紋計算。
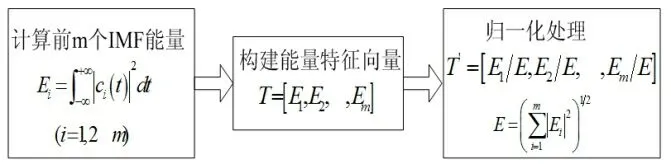
圖2 特征指紋計算
(2)建立多故障動力指紋分類器:分別按軸承正常、外圈缺陷和內圈缺陷三類實測信號的IMF能量熵指標構成訓練樣本集合;在訓練樣本基礎上利用改進PSO算法對LSSVM參數對(γ,σ)進行調整訓練;得到最優分類模型。流程如圖3所示。
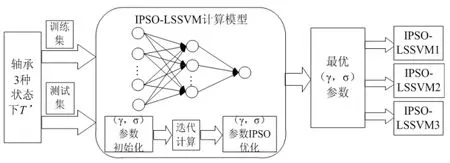
圖3 改進PSO優化的動力指紋分類器的建立
(3)缺陷判定:利用優化分類器對選取的測試信號的IMF能量熵指標進行判斷,確定軸承的缺陷。若回歸函數模型輸出為+1,則認為正常,測試結束;否則自動輸入給IPSO-SVM2。依次類推,直到IPSO-SVM3。若輸出不為+1,說明測試樣本屬于其他故障。

圖4 故障識別流程
4 結語
為了驗證故障動力指紋提取方法的有效性,采用Case Western Reserve Lab(CW-RU)[5]實驗數據來進行軸承故障特征動力指紋提取,動力指紋提取效果好,計算精度高。其對航空發動機主軸滾動軸承故障特征動力指紋提取有重要指導意義。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
當代陜西(2019年10期)2019-06-03 10:12:04
數學物理學報(2017年6期)2018-01-22 02:26:40
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
汽車與新動力(2015年1期)2015-02-27 12:11:01
計算物理(2014年2期)2014-03-11 17:01:44
河南科技(2014年23期)2014-02-27 14:19:15