車輛外部尺寸測量方法探討
2022-02-18 22:23:08顧楊丹陳錫林劉凱
時代汽車 2022年3期
顧楊丹 陳錫林 劉凱

摘 要:介紹了一種新的測量車輛外部尺寸的光學測量裝置,闡述了開發目標、測量原理和方法,與傳統測量方法進行測量數據比對,本測量裝置在提供測量精度的同時解決了測量場地緊缺的難題。
關鍵詞:車輛 外部尺寸 光學測量
1 引言
自從19世紀第一臺汽車問世到現在,汽車產業經過了100多年的發展,外型越來越美觀時尚,也越來越精致。汽車的測量方法也越來越多樣化,隨著科學技術的不斷發展,汽車外部尺寸測量設備的測量精度也越來越高,在那么多的測量方法和測量設備中尋求適合企業自身需求的測量手段也非易事,不求最貴,但求合適。本文通過企業自身的實際需要開發了一套適合的外部尺寸光學測量裝置。
2 開發目標
車輛外部尺寸在生產一致性核查方面非常重要,測量的準確與否對于最終結果起著非常重要的作用。測量準確首要條件是測量設備精確度高,減少在測量過程中由于設備精度而導致的測量誤差。雙懸臂測量機用于車輛的外部尺寸測量,光從測量準確度的角度出發是完全能符合要求的,但雙懸臂測量機對場地要求非常高,需要固定的場地,平時不開展此項試驗時,場地就空置在那里,浪費土地資源。便攜式三坐標雖然對于場地的要求不高,但由于車輛外部尺寸測量范圍比較大,超過了便攜式三坐標的測量范圍,需要通過多次蛙跳來實現尺寸測量,大大降低了測量的準確性,加大了測量誤差。傳統的打點法測量車輛外部尺寸需要至少兩人配合,而且測量精度受限于測量設備和測量方式,對于車輛的高度測量更是準確度不高。基于以上原因,為了解決實際工作中的需求,開發了這套車輛外部尺寸光學測量裝置。采用模塊化設計,具有便攜性及易安裝性,可將設備帶至檢測現場進行快速安裝。在保證測量精度的同時降低了測量場地的占用率,也減少了測量人員的數量,提高了工作效率。
3 測量原理
檢測裝置按六個功能模塊進行設計,分別是車寬方向基準懸臂模塊、車輛縱向對準調節模塊、車輛長度向靜態定點測量模塊、車輛高度檢測模塊、車輛寬度向靜態定點位置檢測模塊、車輛離地靜態檢測模塊。車輛對準采用激光平行反射光線的原理,實現出射光線和反射光線處于同一縱向平面內,從而達到對準的目的。使用可拆卸、可移動式激光測距儀配合雙向平行激光線進行長度測量。利用十字標線儀對應激光線與車身外沿相切的原理,實現尺寸的檢測。檢測裝置兼顧靜態尺寸檢測,配備相應功能的對中、定點檢測部分,整個檢測過程采用非接觸式檢測方式,不傷車身。檢測裝置采用輕質碳纖維材質,結合高強度航空鋁,保證檢測裝置剛性的同時將整體重量減至最輕,方便攜帶。采用快速插拔或快速開合的安裝方式,簡化安裝,滿足快拆、快裝的形式。
4 測量方法
車輛外部尺寸光學測量裝置的底部放于車輛前端用硅膠材質固定。通過調節測量裝置底座上的高精度數顯水平傾角儀調節垂直于X、Y平面與Z平面的夾角,使數顯水平儀調節至近似于“零”的位置。裝置底部的對中激光器射出的光線與車輛前部中心對中, 通過調節微調電機模組中的平移電機使對中激光器射出的光線與置于車輛后部的三菱鏡的返回線重合。通過調節完成底部激光器射出的激光線與車輛縱向對稱平面重合的工作,使碳纖維固定架上的測寬激光器射出的激光線平行于車輛的Y和Z平面,垂直于X平面。
車寬是指分別過車輛兩側固定突出部位(不包括后視鏡、側面標志燈、示廓燈、轉向燈、折疊式踏板、防滑鏈以及輪胎與地面接觸變形部分)最外側點且平行于Y平面的兩平面之間的距離。通過測寬十字激光器在碳纖維固定架滑軌上移動,固定架左側的激光器移至車輛的左側最外端與左側最外端相切,右側的激光器移至相切于車輛的右側最外端。通過激光測距儀測量車輛最外端兩點間的距離。輪距是指同一軸上兩端車輪中點之間的距離。跟車寬的測量原理相似,都是測量平行于Y平面且垂直于X和Z平面的兩平面之間的距離。
汽車長是指分別過汽車前后最外端點且垂直于Y(車輛縱向對稱平面)和Z(車輛支承平面)平面的兩平面間的距離。將測寬十字激光器移至碳纖維支架的左右兩端,調節測長裝置Y向調節螺絲及平行于Z平面的角度,使得測長裝置的對齊激光器射出的激光線與測寬裝置的測寬激光器射出的激光線重合。調節測長裝置X向的位置,使得射出的測長激光線相切于車輛前部最外端點,記錄數據。將測長裝置移至車輛后部,通過與前部一樣的調節方法,將測長裝置投射出的激光線相切于車輛后部最外端點,兩次讀數差就是車長。車輛軸距、前懸、后懸與車長一致都是平行于X平面且垂直于Y和Z平面的兩平面間的距離,測量方法與車長相同。
車高是指車輛最高點至Z平面的距離。將伸縮桿固定在三角支架上將激光器固定在伸縮桿上,通過調節三角支架和伸縮桿高度,使得激光器射出的激光線與車頂最高點相切,用鋼卷尺測量Z平面即底面到激光線的高度得出的值就是車輛的高度。
最小離地間隙是指車輛中間區域內的最低點到Z平面的距離,中間區域為平行于Y平面且月其等距離的兩平面之間所包含的部分,兩平面之間的距離為同一軸上兩端車輪內緣最小距離的80%。將測長十字激光標線儀置于車輛前部,松開激光標線儀調節螺栓,使標線儀移至底部,并上下調節至合適的高度,將激光線投射至放于車輛后部的白板上,在光線似斷非斷時,基本碰到了車輛的最底部,測量激光線至底面的距離,即車輛的最小離地間隙。
5 比對分析
選取某品牌的乘用車一臺,分別用雙懸臂儀、重錘打點法以及本裝置測量車輛的長、寬、高、軸距、輪距、前懸、后懸以及最小離地間隙,雙懸臂和重錘無法探測到車輛底部最低點,故最小離地間隙沒法測量,具體測量數據見表1。
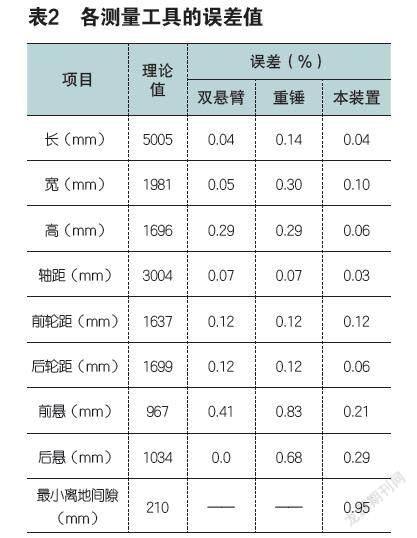
根據該車型提供的理論值,各測量設備及方法的測量結果與理論值之間的誤差見表2。
從表中不難發現本裝置在各項目中的測量誤差明顯優于重錘打點的測量方法,跟雙懸臂的測量誤差相比,不相上下,某幾個項目略勝于其,標準規定車輛長度的測量誤差為1%,本裝置測量的尺寸數據的測量誤差完全符合標準要求,與另外兩種測量設備和方法相比,最大的優勢在于能毫不費力的測量車輛最小離地間隙,且測量數據準確。
6 結語
車輛外部尺寸測量從測量原理來說不是什么難題,在場地有限的情況下,要怎么合理利用資源也是值得思考的。本文介紹的這套光學測量裝置在解決場地緊缺的同時保證了測量精度,對于有效的開展外部尺寸測量工作有著非常大的幫助,為檢測工作的順利開展提供了基礎服務。
參考文獻:
[1]GB/T 3730.3-1992.汽車和掛車的術語及其定義車輛尺寸.
[2]GB/T 12673-1990.汽車主要尺寸測量方法.
[3]GB/T 15089-2001.機動車輛及掛車分類.
