基于云平臺(tái)的油井動(dòng)液面一體化智能監(jiān)測(cè)系統(tǒng)設(shè)計(jì)
2022-02-15 02:48:18金杭超祝乃軒齊麗強(qiáng)黃清龍
信息記錄材料 2022年12期
金杭超,祝乃軒,齊麗強(qiáng),黃清龍
(1 中國(guó)船舶第715研究所 浙江 杭州 310023)
(2 杭州瑞利超聲科技有限公司 浙江 杭州 310023)
0 引言
在油井的鉆探和開采中,油井液面(此時(shí)液面是動(dòng)態(tài)變化的,叫做“動(dòng)液面”)的準(zhǔn)確監(jiān)測(cè)直接影響著油井的現(xiàn)場(chǎng)安全以及生產(chǎn)效率[1]。動(dòng)液面的傳統(tǒng)測(cè)量方法是使用無(wú)彈頭火藥子彈或氮?dú)馄柯晱椬鳛榘l(fā)聲介質(zhì),利用液位儀由人工定期進(jìn)行測(cè)試操作[2-4]。目前所使用的液位儀在使用過(guò)程存在諸多問(wèn)題:①在現(xiàn)場(chǎng)測(cè)量采集時(shí),往往需要使用電纜安裝連接多個(gè)設(shè)備或組件,存在安裝繁瑣、電纜纏繞易損和組件油泥清洗防護(hù)不便的缺點(diǎn)。②由于檢測(cè)任務(wù)重或要求檢測(cè)任務(wù)經(jīng)濟(jì)高效,專業(yè)檢測(cè)人員缺少,現(xiàn)場(chǎng)液面檢測(cè)時(shí),通常需要一個(gè)人完成井下液面檢測(cè)儀自動(dòng)測(cè)量設(shè)備的安裝和拆卸、電腦軟件的操控和分析,檢測(cè)作業(yè)十分不便。③傳統(tǒng)產(chǎn)品組件多,作業(yè)人員攜帶不便,維護(hù)過(guò)程復(fù)雜,培訓(xùn)任務(wù)較重。④目前暫無(wú)法完成無(wú)人自動(dòng)化測(cè)量任務(wù),數(shù)據(jù)無(wú)法便捷的通過(guò)硬件遠(yuǎn)傳至廠家或分析中心測(cè)量予以分析支持。
針對(duì)上面的各種問(wèn)題,本文從小型化、低功耗和智能化的方向設(shè)計(jì)一個(gè)基于云平臺(tái)的油井動(dòng)液面一體化智能監(jiān)測(cè)系統(tǒng),設(shè)計(jì)上將采集控制設(shè)備箱精簡(jiǎn)為一體化單元模塊并嵌入槍體結(jié)構(gòu),省去傳統(tǒng)設(shè)備外部連接電纜組件和一個(gè)采集設(shè)備箱。槍體上的采集控制模塊可通過(guò)一體化天線或外接延長(zhǎng)天線與遠(yuǎn)場(chǎng)的便攜計(jì)算機(jī)進(jìn)行數(shù)據(jù)傳輸。操作人員可控制外部氣瓶通過(guò)調(diào)壓后對(duì)槍體進(jìn)行充氣,還可在遠(yuǎn)端通過(guò)安裝在便攜電腦上的分析控制軟件來(lái)控制對(duì)氣槍進(jìn)行發(fā)射和數(shù)據(jù)采集。
必須要面對(duì)的是,油井現(xiàn)場(chǎng)動(dòng)液面情況一般較為復(fù)雜,常常會(huì)出現(xiàn)難以直接判斷出準(zhǔn)確液面位置的復(fù)雜監(jiān)測(cè)數(shù)據(jù),在移動(dòng)網(wǎng)絡(luò)方便情形下若能借助于云平臺(tái),由油井現(xiàn)場(chǎng)人員將監(jiān)測(cè)數(shù)據(jù)一鍵上傳到云端,便可借助在云端布設(shè)的液面位置智能識(shí)別算法更為準(zhǔn)確地得到液面位置數(shù)據(jù)[5-6]。
綜合以上分析,本系統(tǒng)首先按照小型化、低功耗和智能化的設(shè)計(jì)思路,將采集控制設(shè)備箱精簡(jiǎn)為一體化單元模塊并嵌入槍體結(jié)構(gòu),省去傳統(tǒng)設(shè)備外部連接電纜組件和一個(gè)采集設(shè)備箱。槍體上的采集控制模塊可通過(guò)一體化天線或外接延長(zhǎng)天線與遠(yuǎn)場(chǎng)的便攜計(jì)算機(jī)進(jìn)行數(shù)據(jù)傳輸。同時(shí),當(dāng)油井現(xiàn)場(chǎng)出現(xiàn)難以直接判斷出準(zhǔn)確液面位置的復(fù)雜監(jiān)測(cè)數(shù)據(jù)時(shí),一鍵將監(jiān)測(cè)數(shù)據(jù)上傳到云端,借助布設(shè)在云端的復(fù)雜智能算法實(shí)現(xiàn)更為精準(zhǔn)的液面位置監(jiān)測(cè)。
1 油井動(dòng)液面一體化智能監(jiān)測(cè)系統(tǒng)
油井動(dòng)液面一體化智能監(jiān)測(cè)系統(tǒng)的組成如圖1所示。
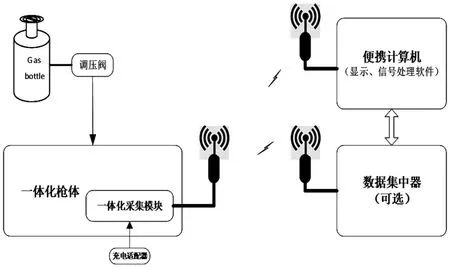
圖1 油井動(dòng)液面一體化智能監(jiān)測(cè)系統(tǒng)組成圖
系統(tǒng)的核心是一體化槍體,其不但實(shí)現(xiàn)了聲源的產(chǎn)生,聲音信號(hào)的接收、存儲(chǔ)和傳輸也由其完成。
首先一體化槍體在按照井上作業(yè)程序完成管匯上的安裝后,開啟槍體采集控制模塊和便攜式計(jì)算機(jī)的電源,運(yùn)行便攜計(jì)算機(jī)液面監(jiān)測(cè)儀軟件。便攜式計(jì)算機(jī)通過(guò)WiFi發(fā)現(xiàn)并連接高壓或一體化型井下液面檢測(cè)儀采集控制模塊發(fā)出的AP熱點(diǎn)信號(hào)并通過(guò)分析控制軟件建立通訊連接,操作人員可遠(yuǎn)程通過(guò)計(jì)算機(jī)分析控制軟件對(duì)設(shè)備進(jìn)行遠(yuǎn)程操控,也可在設(shè)備端現(xiàn)場(chǎng)通過(guò)按鍵對(duì)設(shè)備進(jìn)行本地操控。通過(guò)操控控制采集控制模塊完成槍體的充氣、發(fā)射和信號(hào)采集,最后將所采集處理的數(shù)據(jù)通過(guò)Wifi網(wǎng)絡(luò)發(fā)送給遠(yuǎn)端便攜式計(jì)算機(jī)分析控制軟件。采集控制模塊也可以定期通過(guò)lora無(wú)線通訊方式喚醒附加安裝在槍體上的壓力、溫度傳感器,并完成槍體溫度壓力數(shù)據(jù)的采集,以便協(xié)同提供給信號(hào)處理軟件進(jìn)行處理。
2 系統(tǒng)電路原理分析
油井動(dòng)液面一體化智能監(jiān)測(cè)系統(tǒng)的電路組成示意如圖2所示。

圖2 系統(tǒng)電路成示意圖
由于一體化槍的采集控制模塊內(nèi)置鋰電池,整個(gè)槍體的信號(hào)采集和充氣發(fā)射電磁閥用電采用低功耗用電控制策略,針對(duì)采集控制模塊需要對(duì)外部充氣電磁閥進(jìn)行控制輸出功率受限問(wèn)題,采集控制模塊內(nèi)置鋰電池和超級(jí)電容組合以便確保電池可以瞬間輸出電流脈沖以驅(qū)動(dòng)充氣電磁閥。針對(duì)氣瓶通過(guò)調(diào)壓器對(duì)槍體進(jìn)行充氣氣壓不足,通過(guò)延長(zhǎng)充氣時(shí)間方式解決;針對(duì)長(zhǎng)時(shí)間充氣導(dǎo)致電池消耗快的問(wèn)題,充氣電磁閥特采用脈沖電磁閥進(jìn)行充氣控制,以便節(jié)約用電。以延長(zhǎng)單次充電后滿足設(shè)備的使用壽命。
對(duì)于一體化型井下液面檢測(cè)儀套管內(nèi)氣壓和溫度的測(cè)量有線連接不便問(wèn)題,通過(guò)使用定制的專用無(wú)線壓力溫度傳感器來(lái)完成采集。無(wú)線壓力溫度傳感器采用可更換的電池進(jìn)行供電,在設(shè)備正常使用頻次下傳感器電池可滿足一年使用要求;在對(duì)液面進(jìn)行測(cè)量之前,槍體上的采集控制模塊可無(wú)線喚醒無(wú)線壓力溫度傳感器,傳感器完成相關(guān)數(shù)據(jù)的采集后返回給采集控制模塊,協(xié)同液面原始數(shù)據(jù)一同發(fā)送給遠(yuǎn)程計(jì)算機(jī)分析控制軟件。
一體型液面檢測(cè)儀上內(nèi)置數(shù)據(jù)遠(yuǎn)傳模塊,當(dāng)測(cè)試現(xiàn)場(chǎng)遇到難以分析的數(shù)據(jù)時(shí),在有網(wǎng)絡(luò)的情況下,現(xiàn)成測(cè)試人員可一鍵上傳測(cè)試數(shù)據(jù)到云平臺(tái),通過(guò)在云平臺(tái)架設(shè)的智能算法可便捷的分析出準(zhǔn)確的液面位置數(shù)據(jù)。
3 一體化槍體結(jié)構(gòu)設(shè)計(jì)
一體化槍體結(jié)構(gòu)設(shè)計(jì)既要考慮到聲源的合理處理,又要考慮到采集傳輸模塊的合適布局,其結(jié)構(gòu)圖如圖3所示。

圖3 一體化槍體結(jié)構(gòu)示意圖
整個(gè)槍體是在前期槍體的基礎(chǔ)上進(jìn)行改進(jìn)設(shè)計(jì),結(jié)構(gòu)部分主要分為主槍體、儲(chǔ)氣室、定制一體式充氣電磁閥和放氣電磁閥及采集控制模塊和傳感器單元。所有模塊的走線都全部通過(guò)O型圈密封在槍體內(nèi),除出氣口位置,整體設(shè)備滿足IP68防水標(biāo)準(zhǔn)。
4 智能云平臺(tái)設(shè)計(jì)
云平臺(tái)首先利用Internet 將廣域異構(gòu)計(jì)算資源整合,形成一個(gè)抽象的、虛擬的和動(dòng)態(tài)擴(kuò)展的計(jì)算機(jī)資源池;再通過(guò)Internet 向用戶按需提供計(jì)算資源、存儲(chǔ)資源和應(yīng)用軟件等服務(wù)。在云平臺(tái)上,計(jì)算機(jī)資源得以共享,能夠提供強(qiáng)大的計(jì)算存儲(chǔ)功能[7-8]。
4.1 云平臺(tái)架構(gòu)
智能云平臺(tái)的目的在于構(gòu)建一個(gè)油井液位的復(fù)雜數(shù)據(jù)智能分析中心和數(shù)據(jù)存儲(chǔ)中心。在云平臺(tái)布設(shè)智能油井液位識(shí)別算法,更方便現(xiàn)場(chǎng)操作人員通過(guò)互聯(lián)網(wǎng)借助云端復(fù)雜算法處理難以準(zhǔn)確分析出液面具體位置的復(fù)雜數(shù)據(jù),同時(shí),將油田現(xiàn)場(chǎng)的動(dòng)液面數(shù)據(jù)匯總至云數(shù)據(jù)中心,不僅有利于不同區(qū)域的工作人員共享測(cè)試經(jīng)驗(yàn),也更有利于云端智能算法的不斷優(yōu)化,并以此來(lái)為現(xiàn)場(chǎng)工作人員提供更為精準(zhǔn)的智能識(shí)別算法。具體架構(gòu)如圖4所示

圖4 智能云平臺(tái)架構(gòu)示意圖
當(dāng)油井現(xiàn)場(chǎng)有復(fù)雜數(shù)據(jù)需要云端支持時(shí),主機(jī)程序界面有一鍵上傳當(dāng)前數(shù)據(jù)的按鈕,在主機(jī)聯(lián)網(wǎng)的情況下,點(diǎn)擊按鈕上傳數(shù)據(jù),云端服務(wù)器應(yīng)用程序在收到數(shù)據(jù)后,調(diào)用智能算法程序,該算法程序能夠借助云計(jì)算的強(qiáng)大算力準(zhǔn)確的識(shí)別出液面具體位置,計(jì)算出來(lái)的結(jié)果再由服務(wù)器應(yīng)用程序通過(guò)互聯(lián)網(wǎng)定點(diǎn)傳遞給請(qǐng)求云端支持的油井現(xiàn)場(chǎng)主機(jī)應(yīng)用程序,測(cè)試人員便可得到準(zhǔn)確的油井液面深度。
完成液面位置測(cè)試數(shù)據(jù)分析后,服務(wù)器應(yīng)用程序會(huì)同步地將該數(shù)據(jù)存儲(chǔ)到數(shù)據(jù)庫(kù),數(shù)據(jù)庫(kù)的數(shù)據(jù)一方面可供測(cè)試人員下載學(xué)習(xí),另一方面,智能算法程序會(huì)定期地利用數(shù)據(jù)庫(kù)的測(cè)試數(shù)據(jù)更新算法,以便后期更為精準(zhǔn)地對(duì)復(fù)雜數(shù)據(jù)進(jìn)行分析。
4.2 云平臺(tái)智能分析流程
智能云平臺(tái)的核心是對(duì)所上傳液面位置測(cè)試數(shù)據(jù)的智能分析,其具體分析流程如圖5所示

圖5 云平臺(tái)分析流程圖
云平臺(tái)的智能算法程序在收到油井現(xiàn)場(chǎng)上傳測(cè)試數(shù)據(jù)后,首先進(jìn)行異常判斷,在實(shí)際的油井液面測(cè)試中,由于設(shè)備原因或者現(xiàn)場(chǎng)環(huán)境影響,所測(cè)的數(shù)據(jù)常常無(wú)法分析出進(jìn)行油井液面,這些數(shù)據(jù)被稱為異常液面測(cè)試數(shù)據(jù),導(dǎo)致測(cè)試異常的具體原因有氣瓶壓力不足、槍體漏氣、槍體有污垢、主板故障、現(xiàn)場(chǎng)測(cè)試氣路不暢以及液面氣泡過(guò)多等。
智能算法程序主要使用BP(Back Propagation)神經(jīng)網(wǎng)絡(luò)算法來(lái)智能的識(shí)別異常數(shù)據(jù)以及導(dǎo)致異常的原因。若數(shù)據(jù)無(wú)異常,則根據(jù)測(cè)試位置的不同,常常使用幅值測(cè)定法,區(qū)間最小二乘平滑濾波以及自相關(guān)周期估計(jì)等對(duì)應(yīng)的進(jìn)行液面深度分析。
4.3 異常數(shù)據(jù)智能識(shí)別算法簡(jiǎn)析
在實(shí)際的運(yùn)行中發(fā)現(xiàn),現(xiàn)場(chǎng)測(cè)試的難以分析的復(fù)雜數(shù)據(jù)有一大部分是由于各種故障和環(huán)境影響造成的異常數(shù)據(jù),所以,如何準(zhǔn)確的篩選出異常數(shù)據(jù)至關(guān)重要。這里對(duì)所使用的基于BP神經(jīng)網(wǎng)絡(luò)的異常數(shù)據(jù)篩選算法進(jìn)行簡(jiǎn)要分析。
BP神經(jīng)網(wǎng)絡(luò)是人工神經(jīng)網(wǎng)絡(luò)(artificial neural network,ANN)的一種,其結(jié)構(gòu)如圖6所示

圖6 BP神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)圖
BP神經(jīng)網(wǎng)絡(luò)是一種前饋神經(jīng)網(wǎng)絡(luò),其主要特點(diǎn)是信號(hào)前向傳遞,誤差反向傳播。在前向傳遞中,輸入信號(hào)從輸入層經(jīng)隱含層逐層處理,直至輸出層。每一層的神經(jīng)元狀態(tài)只影響下一層神經(jīng)元狀態(tài)。如果輸出層得不到期望輸出,則轉(zhuǎn)入反向傳播,根據(jù)預(yù)測(cè)誤差調(diào)整網(wǎng)絡(luò)權(quán)值和闊值,從而使BP 神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)輸出不斷逼近期望輸出[9]。
油井液位數(shù)據(jù)是一個(gè)聲波采樣序列,整個(gè)采樣時(shí)長(zhǎng)為30秒,針對(duì)其聲學(xué)特征,首先將30秒在時(shí)域分別依次分成10段,提取每段的負(fù)向最大極值,同時(shí)再提取聲波采樣序列的時(shí)域正向最大幅值、時(shí)域負(fù)向最大幅值、頻域主峰頻率和頻域次珠峰頻率總共的14個(gè)值作為BP神經(jīng)網(wǎng)絡(luò)的輸入,對(duì)應(yīng)輸入層節(jié)點(diǎn)變?yōu)?4。選定正常數(shù)據(jù)、槍體壓力不足、槍體有污垢、主板故障、現(xiàn)場(chǎng)測(cè)試氣路不暢、液面氣泡過(guò)多以及其他原因這7個(gè)結(jié)果作為BP神經(jīng)網(wǎng)絡(luò)的輸出,對(duì)應(yīng)輸出層節(jié)點(diǎn)變?yōu)?。根據(jù)輸入輸出節(jié)點(diǎn)的個(gè)數(shù)以及經(jīng)驗(yàn)值,隱含層節(jié)點(diǎn)選定18個(gè)。
BP神經(jīng)網(wǎng)絡(luò)的整體結(jié)構(gòu)便為14-18-7,即輸入層有14個(gè)節(jié)點(diǎn),隱含層有18個(gè)節(jié)點(diǎn),輸出層有7個(gè)節(jié)點(diǎn)。經(jīng)過(guò)上千次的訓(xùn)練后,該網(wǎng)絡(luò)在實(shí)際的運(yùn)行中能夠?qū)?fù)雜數(shù)據(jù)中的異常數(shù)據(jù)進(jìn)行準(zhǔn)確的篩選。同時(shí),隨著數(shù)據(jù)庫(kù)中實(shí)測(cè)數(shù)據(jù)的不斷積累,該網(wǎng)絡(luò)會(huì)進(jìn)行定期地對(duì)新數(shù)據(jù)進(jìn)行訓(xùn)練并更新網(wǎng)絡(luò)本身,另外,借助云計(jì)算的強(qiáng)大算力,后期也會(huì)不斷地豐富網(wǎng)絡(luò)結(jié)構(gòu)而使整個(gè)智能網(wǎng)絡(luò)算法更加健壯和精準(zhǔn)。
5 結(jié)語(yǔ)
針對(duì)油井動(dòng)液面測(cè)試過(guò)程中所遇到的各種問(wèn)題,本文從小型化、低功耗和智能化的方向設(shè)計(jì)一個(gè)基于云平臺(tái)的油井動(dòng)液面一體化智能監(jiān)測(cè)系統(tǒng),設(shè)計(jì)上將采集控制設(shè)備箱精簡(jiǎn)為一體化單元模塊并嵌入槍體結(jié)構(gòu),省去傳統(tǒng)設(shè)備外部連接電纜組件和一個(gè)采集設(shè)備箱。槍體上的采集控制模塊可通過(guò)一體化天線或外接延長(zhǎng)天線與遠(yuǎn)場(chǎng)的便攜計(jì)算機(jī)進(jìn)行數(shù)據(jù)傳輸。最后,針對(duì)測(cè)試現(xiàn)場(chǎng)容易出現(xiàn)的難以直接判斷出準(zhǔn)確液面位置的復(fù)雜監(jiān)測(cè)數(shù)據(jù),架設(shè)智能云平臺(tái),油井現(xiàn)場(chǎng)人員通過(guò)互聯(lián)網(wǎng)將監(jiān)測(cè)數(shù)據(jù)一鍵上傳到云端,云端的智能算法程序借助云端強(qiáng)大的計(jì)算力對(duì)復(fù)雜數(shù)據(jù)進(jìn)行精準(zhǔn)分析與判斷。這樣,對(duì)油井動(dòng)液面的監(jiān)測(cè)就變得既便捷又可靠。
猜你喜歡
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
電子制作(2018年18期)2018-11-14 01:48:24
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44