基于DOE方法的射擊機器人發射機構測試性能影響因素分析
2022-02-04 01:44:22幸琳喬何俐萍索浩良劉靖
機械 2022年11期
關鍵詞:設計
幸琳喬,何俐萍,索浩良,劉靖
基于DOE方法的射擊機器人發射機構測試性能影響因素分析
幸琳喬,何俐萍*,索浩良,劉靖
(電子科技大學 機械與電氣工程學院,四川 成都 611731)
為克服常見射擊機器人存在的彈丸打擊準確性不高、發射波動性大等問題,以摩擦輪發射機構為研究對象,提出一種基于試驗設計(Design of Experiment,DOE)方法的射擊機器人發射機構性能設計和分析方法。首先,通過分析發射機構運動關系,利用赫茲接觸理論建立彈丸發射加速度模型,確定摩擦輪的半徑、材料屬性和單邊最大過盈量三個可控因素,篩選出試驗影響因子。其次,對三個可控因素進行試驗設計并建立因素影響模型,進行發射機構影響因素的參數優化。同時,通過方差分析法驗證摩擦輪的材料和單邊最大過盈量對彈丸發射影響的顯著性;最后,對設計的參數進行可測試性分析,測試不同的試驗條件下彈丸發射性能水平。實驗結果表明彈丸發射初速度達到28 m/s,命中靜止目標的概率為97 %,在滿足設定的彈丸發射指標要求前提下,保證了射擊機器人的發射準確性和穩定性。
機器人發射機構;可測試性;影響因素;參數篩選;方差分析法
當前,具備自主移動、自主射擊等功能的射擊機器人,如:發球機器人[1]、滅火彈發射機器人[2]和武裝射擊機器人[3],廣泛應用于各個領域。發射機構是射擊機器人完成發射任務的關鍵機構,常見的有電磁發射、氣動發射和離心發射等[4]。氣動發射機構發射可靠性較高,但需要設置儲氣、緩沖等裝置,結構較復雜[5-6];電磁發射在發射過程中會受炮口高速、高溫、高壓拉弧的影響產生擾動,直接影響發射精度[7];離心發射機構裝置因體積較大,多用于太空發射[8]。電動源發射通過高速運行的摩擦輪帶動彈丸射出(如圖1),結構簡單、無需火藥,具有安全性好、噪音小、彈丸初速可調、適應范圍廣等優點,可對目標進行非致命打擊,是一項在船舶反海盜、油庫巡防、安保巡查等領域運用前景突出的新型發射技術[9-10]。

圖1 摩擦輪發射機構
通過摩擦輪發射機構的不同類型考察機構性能,雙輪驅動比單輪驅動的優勢明顯[10]。雙輪摩擦輪發射機構通過直流無刷電機,可驅動摩擦輪以一定預設速度轉動,完成槍管中彈丸的加速。但實際射擊過程中,存在彈丸打擊不準確、發射有波動性等問題。如何保證彈丸打擊準確和發射穩定,成為影響摩擦輪發射機構使用的主要制約問題[10-11]。方弄心等[12]基于對炮彈發射機器人的設計和實現并完成調試,克服了傳統炮彈發射機器人只可遠距離發射及發射準確率低的缺點;王培源等[13]對電動源發射的摩擦輪材料分析,提高了電動源發射的穩定性。但目前就摩擦輪發射機構的性能設計和影響分析方面的研究仍顯不足。
論文以射擊機器人電動源發射機構為研究對象,提出一種基于DOE方法的彈丸發射的主要影響因素分析方法,以期在試驗設計過程中對影響因素進行優化并指導參數選擇,提高機器人彈丸發射的準確性和穩定性。
1 摩擦輪發射機構運動分析
通過對摩擦輪發射機構的彈丸運動過程進行分析,建立彈丸加速度模型,針對彈丸的固有參數,分析摩擦輪發射影響性因素。
1.1 摩擦輪發射機構運動模型
如圖2所示,彈丸與摩擦輪開始接觸時,彈丸受到撥彈裝置和置位裝置影響,具有一定的初速度,摩擦輪由電機帶動。

v0為彈丸沿運動方向的速度,m/s;M為電機轉矩,N·m;v1為摩擦輪線速度,m/s。
根據赫茲接觸理論分析[13],如圖3所示,彈丸在與摩擦輪接觸過程中受到和的作用,兩個力共同作用擠壓彈丸沿方向運動,彈丸受到的載荷為,和的函數關系為:

式中:1和2分別為彈丸和摩擦輪的彈性模量,MPa;1和2分別為彈丸和摩擦輪的泊松比;1和2分別為彈丸和摩擦輪的半徑,mm。
隨著彈丸的運動而變化,運動到與摩擦輪圓心連線中點時,達到最大,即為單邊最大過盈量max。
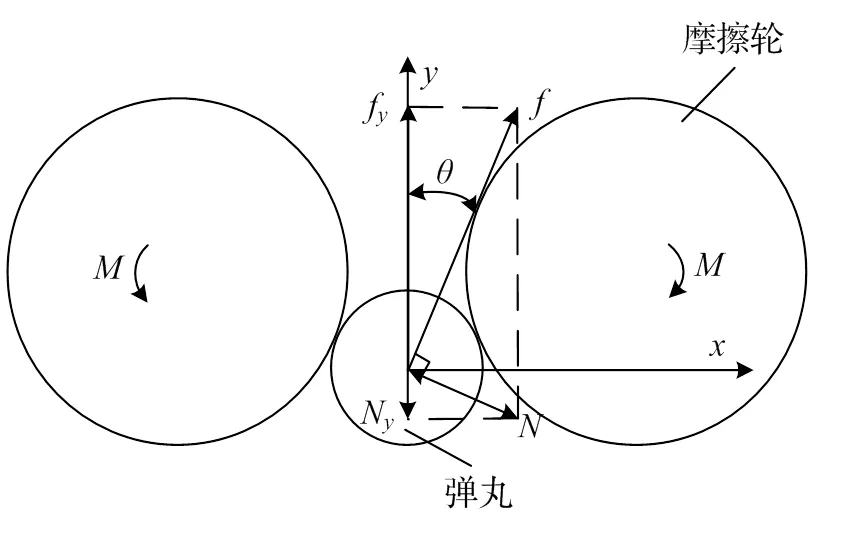
N為摩擦輪的壓力,N;f為摩擦力,N;δ為變形量,mm;fy為f在y方向上的分力,N;Ny為N在y方向上的分力,N。
如圖4所示,彈丸運動方向為軸方向,彈丸在運動過程中,與N之間的關系為:

式中:;x為彈丸沿運動方向的位移,mm;l1為運動過程中彈丸與摩擦輪之間的球心距,mm;l2為彈丸進入和離開摩擦輪時兩個位置之間的球心距,mm。
彈丸在運動過程中,和的關系為:
式中:為摩擦輪與彈丸之間的摩擦系數。
與其在運動方向上的分力f之間的幾何關系為:
對彈丸沿運動方向的發射過程進行分析,彈丸受到兩個摩擦輪的合力作用:

式中:F為彈丸受到的合力,N。
根據牛頓第二定律可得彈丸加速度與F之間的關系,綜合式(5),彈丸加速度的數學模型為:

式中:為彈丸的質量。
1.2 彈丸發射速度影響因素分析
設計試驗中使用的發射彈丸型號為17 mm,其固有參數如表1所示,結合式(6)可知,影響彈丸最終發射速度以及最大接觸應力主要為彈丸的材料參數、摩擦輪的材料參數和摩擦輪對彈丸的擠壓量,主要包括摩擦輪和彈丸的半徑、彈性模量以及彈丸和摩擦輪接觸過后的擠壓量。基于彈丸固有參數已經確定,本文對發射機構中的摩擦輪的半徑、摩擦輪的材料和單邊最大過盈量三個可控因素進行分析。

表1 17 mm彈丸參數表
2 彈丸發射機構指標
2.1 彈丸發射初速度
在彈丸發射中,彈丸發射初速度的大小反映彈丸的打擊距離,具有決定性的作用[14]。因此,需要將彈丸初速度作為一個衡量機器人發射機構性能的射擊指標。
針對不同型號的彈丸,彈丸的發射初速度有相應的限制,如表2所示,低于最低發射初速度則視為發射無效,試驗中使用的是17 mm彈丸,最低發射初速度為12 m/s。
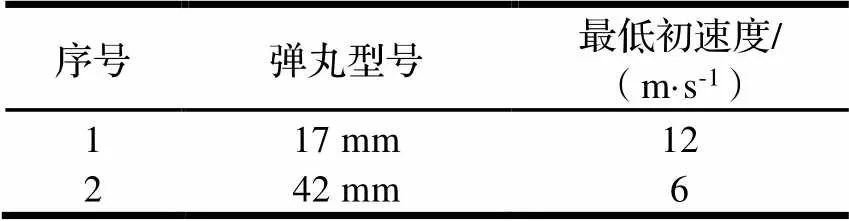
表2 不同型號彈丸的最低初速度
由于彈丸在發射過程中,不可避免地會對車體產生一些擾動,從而影響發射穩定性,通過控制底盤參數可以控制車體擾動,降低其對發射穩定性的影響[15]。
因此,根據機器人的最大底盤功率依次劃分性能等級[16],根據性能等級的不同,設置初速度上限值,如表3所示,本試驗設計中彈丸最大發射初速度限制為30 m/s。

表3 不同性能等級機器人的彈丸發射初速度上限值
同時,當摩擦輪持續受到較大接觸應力時,摩擦輪表面會出現磨損或失效等現象,導致其性能下降,進而影響彈丸發射的穩定性[17]。因此,在彈丸發射過程的參數設計時,不僅要考慮彈丸最終的發射速度,還要考慮摩擦輪受到的最大接觸應力,在滿足設計標準的發射速度情況下,盡可能的減小最大接觸應力,控制摩擦輪的磨損,保證彈丸發射的穩定性。
2.2 彈丸發射頻率與射擊散步范圍
考慮到機器人運動過程中的綜合射擊性能,即在滿足單次射擊的準確性的前提下,具有良好的連續射擊的穩定性,試驗中對彈丸的最大射擊頻率的性能指標擬定為20 Hz。
在給定控制摩擦輪的電機轉速恒定的情況下,彈丸的發射速度將穩定在一個區間內,在理想情況下彈丸會集中擊打目標靶心。在實際射擊中,彈丸的發射速度受多種因素作用,會產生一定的波動,進而影響彈丸最終的落點,影響彈丸發射的穩定性。當彈丸的發射速度與理想發射速度之間的速度偏差過大時,會出現脫靶現象,即為無效擊打[18]。在本文的設計指標中,對于尺寸為100 mm×100 mm的靜止目標,彈丸脫靶率為5%~10%時,視為功能下降;脫靶率大于10%時,視為不可工作。
上述為機器人發射系統的設計指標,各項指標參數如表4所示。

表4 發射系統設計指標
3 影響因素試驗設計與分析
3.1 摩擦輪半徑對彈丸發射的影響及參數篩選
設定單邊最大過盈量為2 mm,摩擦輪材料使用彈性模量為10 MPa的聚氨酯TPU材料,假定摩擦輪線速度足夠大,彈丸以初速度為0的情況下進入摩擦輪之間,探究摩擦輪半徑的大小對彈丸發射過程加速度以及最終發射速度的影響。
分別取摩擦輪半徑為15、20、25、30、35、40 mm進行測試,得到不同摩擦輪半徑下彈丸位移距離和最大處速度變化模型和摩擦輪最大應力和速度-應力變化模型,分別如圖5、圖6所示。
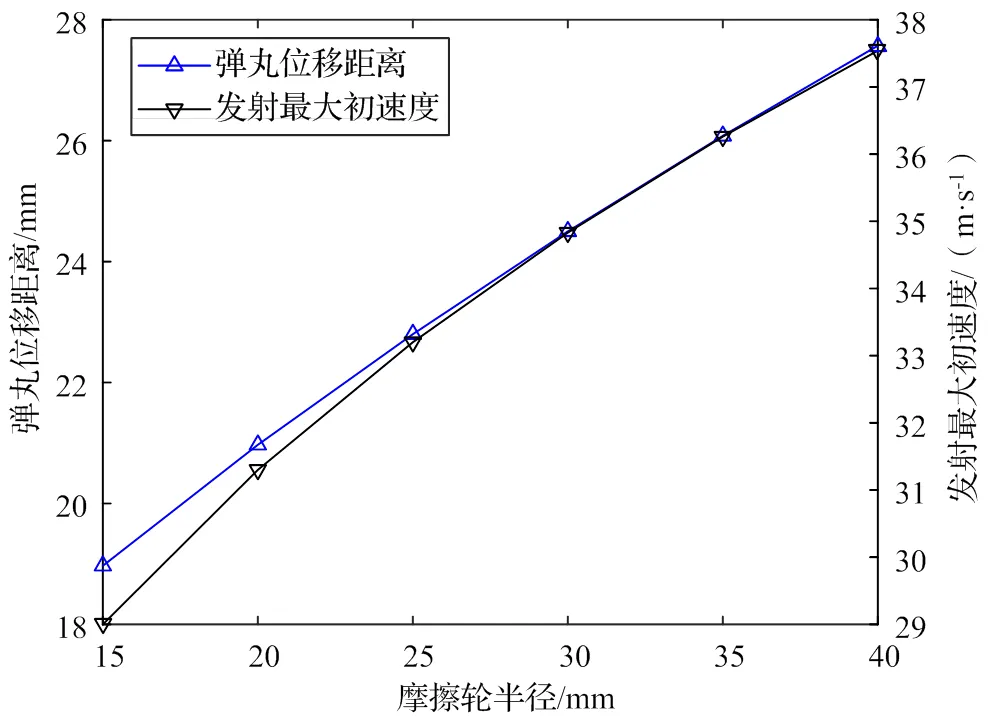
圖5 不同摩擦輪半徑下的彈丸位移距離和最大初速度

圖6 不同摩擦輪半徑下的摩擦輪最大應力和速度-應力比值
由圖5可知,彈丸的最終發射速度,即發射最大初速度,隨著摩擦輪半徑的增大而增加,由圖6可知,接觸最大應力隨著摩擦輪半徑的增大而增大,但在實際操作中,摩擦輪的半徑大小受到很多因素的限制,包括電機功率、包膠材料等,綜上考慮,選用摩擦輪半徑為30 mm。
3.2 摩擦輪材料對彈丸發射的影響及參數篩選
設定單邊最大過盈量為2 mm,摩擦輪半徑為30 mm,假定摩擦輪線速度足夠大,彈丸以初速度為零的情況下進入摩擦輪之間,探究不同彈性模量的摩擦輪包膠材料對彈丸發射過程加速度以及最終發射速度的影響。
取摩擦輪包膠材料為彈性模量為7.8 MPa的橡膠以及彈性模量分別為10、20、30、40、50 MPa進行實驗測試,分別得到不同彈性模量下的摩擦輪最大壓力和最大初速度變化模型和摩擦輪最大應力和速度-應力比值變化模型,分別如圖7、圖8所示。
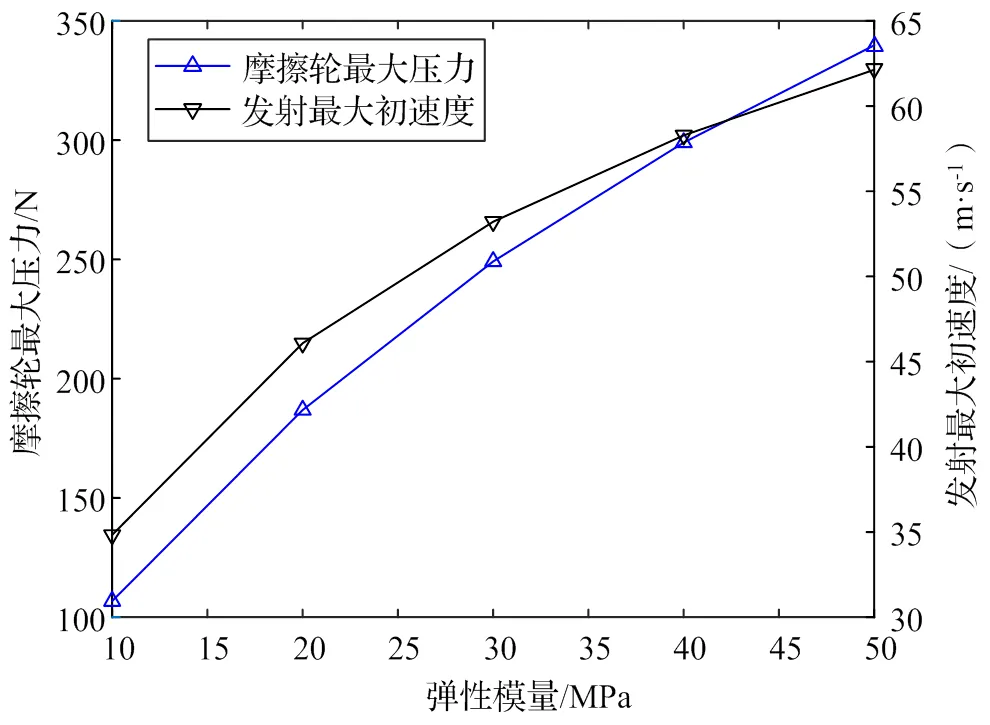
圖7 不同彈性模量下的摩擦輪最大壓力和最大初速度
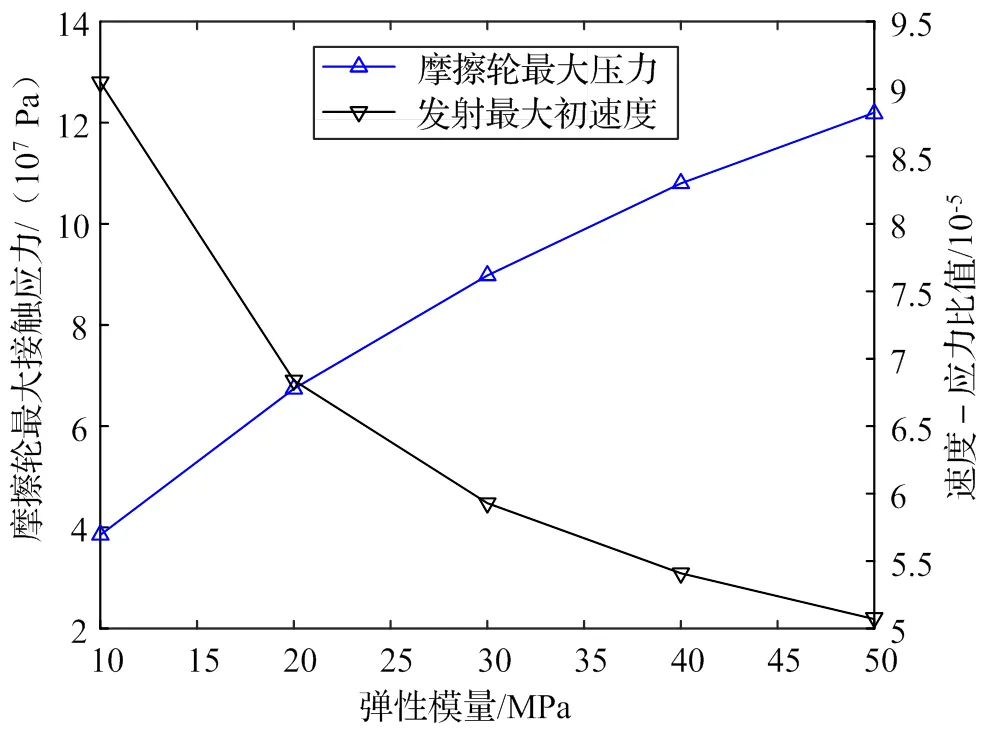
圖8 不同彈性模量下的摩擦輪最大應力和速度-應力比值
由圖7可知,彈丸速度隨著摩擦輪材料的彈性模量的增大而增加。由圖8可知,在單邊最大過盈量保持不變的情況下,摩擦輪彈性模量越大,彈丸和摩擦輪在變形量恒定的情況下受到的彈性擠壓力也就越大,彈丸所受到的合力以及加速度也會增大。雖然彈丸的運動位移并未發生改變,但彈丸發射的最大速度卻因加速度的增大而增大,即彈丸的最終發射速度和摩擦輪的彈性模量大小是正相關。另外,在其他參數不變的情況下,最大接觸應力的大小和摩擦輪的彈性模量正相關。同時,在滿足設計指標發射速度的前提下,應盡可能的選擇小的摩擦輪包膠材料硬度,以保證最大接觸應力處于一個較低水平。在最大發射初速度為30 m/s的指標下,選定摩擦輪包膠材料硬度為60±5 A。
3.3 單邊最大過盈量對彈丸發射的影響及參數篩選
設定摩擦輪的半徑為30 mm,彈性模量為 10 MPa,假定摩擦輪線速度足夠大,彈丸以初速度為0的情況下進入摩擦輪之間,分別取單邊最大過盈量為0.5、1、1.5、2、2.5、3 mm,分別得到不同單邊最大過盈量下的彈丸位移距離和最大初速度變化模型和摩擦輪最大應力和速度-應力比值變化模型,分別如圖9、圖10所示。
由圖9可知,在其他條件相同的情況下,單邊最大過盈量越大,相同摩擦輪半徑情況下摩擦輪間距就越小,彈丸從初始位置到發射位置的位移越大,彈丸受到的最大擠壓力越大,也就導致了彈丸所受到的合力以及加速度越大,在加速度和位移同時增大的情況下,彈丸最終的發射速度也隨之增大。即彈丸最終發射速度和單邊最大過盈量的大小呈正相關。同時,在其他參數不變的情況下,隨著彈丸和摩擦輪接觸的單邊最大過盈量的增大,最大接觸應力也隨之增大,即最大接觸應力與單邊最大過盈量正相關,如圖10所示。
圖9 不同單邊最大過盈量下彈丸位移距離和最大初速度
圖10 不同單邊最大過盈量下摩擦輪最大應力和速度-應力比值
綜上,在滿足設計指標發射速度的前提下,應盡可能選擇較小單邊最大過盈量,保證最大接觸應力處于一個較低水平。在設計指標發射初速度30 m/s的指標下,選定單邊最大過盈量的參數范圍為2.1±0.2 mm。
3.4 基于Bayes方差估計的影響因素參數選擇
依據所選定的參數組合,設計彈丸發射機構平臺試驗,調整摩擦輪轉速為6900 r/min,控制發射機構以20 Hz頻率連續發射200發彈丸,記錄彈丸的發射速度,并計算出平均速度和速度方差,分析彈丸發射的準確性和穩定性。
分別選取摩擦輪硬度為55A、60A、65A進行實驗,實驗數據如表5所示。
表5 不同摩擦輪硬度的實驗數據

表6 不同單邊最大過盈量的實驗數據
分別選取摩擦輪不同單邊過盈量為1.9 mm、2.1 mm、2.3 mm進行實驗,實驗數據如表6所示。
設彈丸發射服從正態分布,即~(,2),其中為平均速度,m/s;2為速度方差;參數是一個未知量。根據Bayes方差估計方法,樣本數據的條件密度函數為:

選取先驗分布為IGamma分布,記為~(,):

分布函數的數學期望為:方差分別為:
分布函數的方差為:

聯合式(9)和式(10)可得:
后驗分布中,設測得的彈丸發射速度數據分別為1,2, ...,x,由貝葉斯定理可得出:
聯合式(11)和式(12)可得:


以測量數據的矩估計作為先驗分布,基于上述Bayes小子樣方差估計方法[19],通過測量值對矩估計進行測量更新,對表5和表6的不同條件下測試得到的方差進行估計,如表7所示。
針從實驗數據可以得出,在摩擦輪硬度為55A時,估計方差相對較小,與硬度為60A和65A的條件相比發射最為穩定;在單邊最大過盈量為2.3 mm時,彈丸發射速度估計方差較小,發射相對穩定。故論文中,發射機構優化參數選擇摩擦輪硬度為55A,單位最大過盈量為2.3 mm。
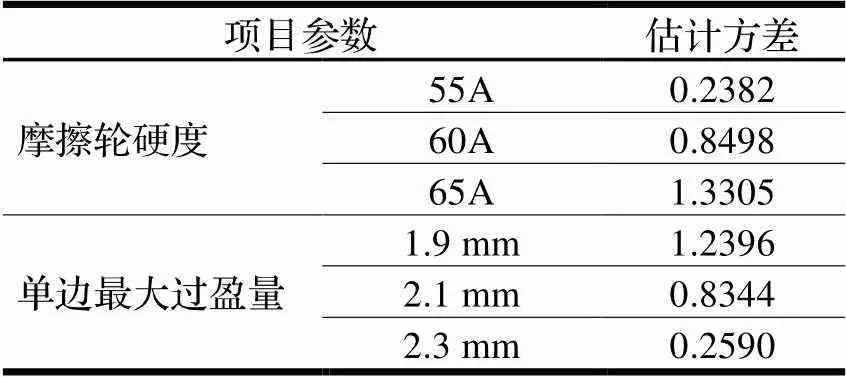
表7 方差估計值
通過上述討論,關于彈丸發射的三個優化可控因素選擇如表8所示。
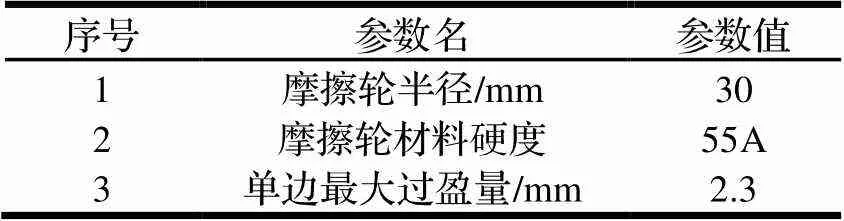
表8 彈丸發射優化可控因素
4 基于方差分析的影響因素驗證
4.1 方差分析法
作為一種實用、有效的數據分析方法,方差分析法能夠檢測出不同影響因素對實驗所得結果的影響顯著性,可以節約仿真工作時間并提高實驗效率[20]。對因素的個水平進行試驗測試,每個水平進行組重復試驗,可以得到×組數據結果,假設每組數據結果相互獨立,通過計算可以得到樣本總均值、離差平方和組內均值以及組內平方和,而不同水平下可以計算出組間平方和,離差平方和的分解為:

式中:T為離差平方和;A為組間平方和;E為組內平方和。
在求出平方和及其自由度之后,對數據進行方差分析,令:
4.2 基于方差分析的彈丸發射影響因素顯著性分析
在上述實驗數據基礎上,以彈丸發射速度和速度方差為指標,對試驗結果進行方差分析,分析結果如表9所示,其中,離差平方和的自由度為8,組內平方和的自由度為6。
在檢驗水平=0.1的情況下,由分布上測分位數表可知的臨界值為2.98,即=2.98,因此可判斷,摩擦輪的材料和接觸單邊最大過盈量對彈丸發射的速度及穩定性有顯著影響,驗證了理論分析結果。

表9 摩擦輪材料和間距的方差分析結果
4.3 不同試驗條件下的可測試性分析
試驗設計的指標為,彈丸擊打在100 mm×100 mm范圍內視為有效擊打,按照實驗要求,假設給定摩擦輪轉速,在加入重力補償之后,理想情況下彈丸可以擊打至靶紙中心,如果彈丸速度波動超過一定閾值,將會發生脫靶現象,超出波動閾值的彈丸數量超過5%時視為功能下降,超過10%時視為不可工作。彈丸速度波動對垂直偏移誤差的數學模型如下:

式中:為彈丸距離靶紙距離,m;為彈道豎直偏移誤差,m;為重力加速度,m/s2;為速度波動,m/s,在本設計指標下的閾值為50。
由此得到不同射擊距離下的速度波動閾值,如表10所示。

表10 不同發射速度與不同發射距離下的速度波動閾值
由表10可知,彈丸初速度越大,發射距離越短,可接受的速度波動閾值就越大。
通過實驗證明彈丸發射服從正態分布~(,2),轉換成標準正態分布,即(-)/~(0, 1)為了實現命中靜止目標95%以上的標準,由標準正態分布可知[21]:


測試并驗證設計參數與設計標準的符合度。設定摩擦輪轉速為5700 r/min,將發射機構固定在平臺上,使用白紙和復寫紙組成靶紙,分別將目標靶紙安置于5 m、6.5 m、8 m處,以20 Hz射頻發射200發彈丸,統計彈丸的發射速度及落點,得到實驗結果如表11所示。可知,速度波動閾值與測試方差的關系為Δ>2,即滿足設計標準,在100 mm×100 mm的靶紙上,有超過95%的彈丸命中靶紙,此時發射機構狀態評估為可工作。
進一步考慮不同劣化狀態的評估標準,對可能發生的故障進行試驗設計,設置的參數對應磨損嚴重的摩擦輪和老舊的電機。設定該情況下摩擦輪轉速為5700 r,將靶紙設置在8 m處,以20 Hz的射頻發射200發彈丸,記錄彈丸的落點以及發射情況,并將發射速度代入式(19)中得出速度波動閾值,得到實驗結果如表12所示。

表11 不同射擊距離下彈丸發射數據

表12 不同工況條件下彈丸發射數據
由表12可知,磨損摩擦輪速度波動閾值和方差的關系為Δ<1.65,即超過10%的彈丸無法命中規定的靶紙范圍,狀態評估為不可工作,老舊電機的速度波動閾值和方差的關系為:1.65<Δ<2,即存在5%~10%的彈丸無法命中規定靶紙范圍,狀態評估為性能下降。完整試驗設計與驗證過程如圖11所示。
由圖11所示路線得到的測試結果與設計指標對比,如表13所示。
由表13可知,本文開展的彈丸發射系統的測試性能均達到了設計指標,其中射擊頻率這一指標,可以由控制撥彈機構的電機進行穩定輸出,滿足了最大射頻與彈丸發射穩定性指標。
5 結論
(1)通過彈丸加速度模型篩選出影響彈丸發射的三個可控因素是摩擦輪的半徑、摩擦輪的材料和單邊最大過盈量。
(2)通過方差分析法檢驗,驗證了摩擦輪的材料和單邊最大過盈量對彈丸發射具有顯著性影響。
(3)對完成參數優化后的發射機構進行可測試性分析結果顯示,在100 mm×100 mm的靶紙上,超過95%的彈丸命中率,符合最初試驗設計指標,達到了提高射擊機器人發射穩定性與準確性的目的。
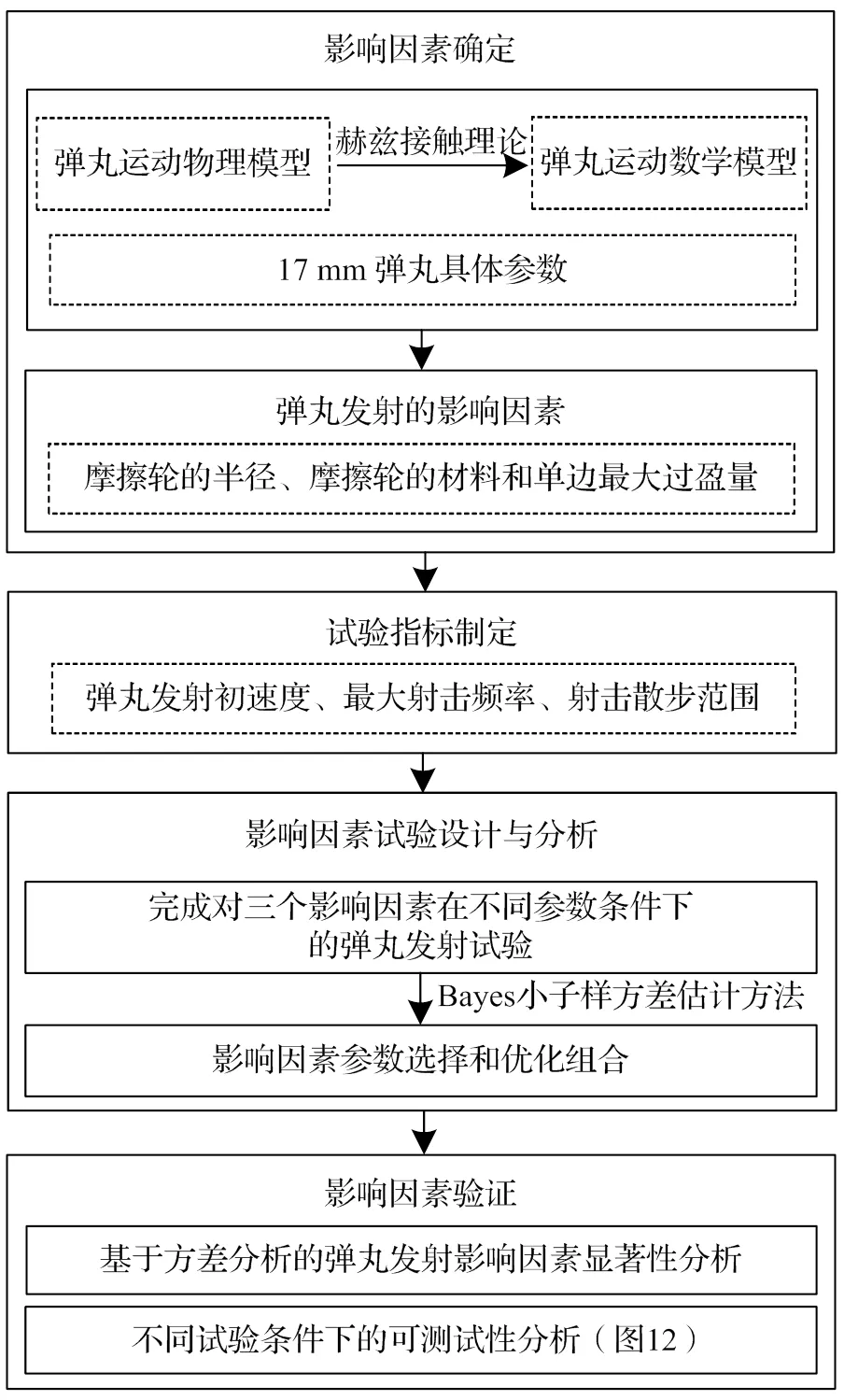
圖11 發射機構測試性能影響因素分析技術路線

圖12 不同試驗條件下的可測試性試驗結果
[1]肖華,黃河,謝模焱. 全方位移動式網球機器人的研究與設計[J]. 機電工程,2015,32(4):509-515.
[2]周瓊,唐火紅,駱敏舟,等. 懸吊式機器人消防炮力學建模與穩定性分析[J]. 機械研究與應用,2015,28(2):54-56,62.
[3]黃思姬. 地面武裝機器人機械系統設計與實驗研究[D]. 南京:南京理工大學,2011.
[4]張相炎. 武器發射系統設計概論[M]. 北京:國防工業出版社,2014.
[5]葉邦松,劉超峰,方彤,等. 一種微型無人機機載氣動連續發射裝置[J]. 智能計算機與應用,2021,11(6):201-204.
[6]郭偉國,鬲鈺焯,蘇靜. 用于分離式Hopkinson桿裝置的一種先進氣動發射機構[J]. 機械科學與技術,2010,29(12):1739-1743,1748.
[7]馬偉明,魯軍勇,李湘平. 電磁發射超高速一體化彈丸[J]. 國防科技大學學報,2019,41(4):1-10.
[8]A. Bolonkin. Non-rocket space launch and flight[M]. Amsterdam:Elsevier,2010.
[9]徐磊,郭三學. 非致命武器的人機工程學分析[J]. 機械科學與技術,2003,23(S2):3-5.
[10]吳星超. 某電動源發射系統關鍵問題研究[D]. 南京:南京理工大學,2014.
[11]周克棟,吳星超,赫雷,等. 電動源發射過程彈丸運動狀態分析研究[J]. 火炮發射與控制學報,2014,35(2):1-6.
[12]方弄玉,鄒心遙,楊娜,等. 炮彈發射游戲機器人設計與實現[J]. 自動化與儀器儀表,2017,37(5):211-213.
[13]王培源,朱嘉程,楊金磊,等. 基于電動摩擦發射源機構的智能安防無人機關鍵技術研究[J]. 技術與市場,2019,26(11):28-29.
[14]X. Li,J. Lu,J. Feng,et al. Modeling for the Calculation of Interior Ballistic Velocity of Electromagnetic Rail Launch Projectile[J]. IEEE Transactions on Plasma Science,2018,47(1):807-813.
[15]鄧輝詠,馬吉勝,劉海平. 履帶式自行火炮發射動力學建模仿真研究[J]. 機械科學與技術,2012,31(4):543-546.
[16]S. Hao,L. Yongcheng,M. Xiaolin,et al. Development and Application of Multi-functional Intelligent Robot Motion Chassis[J]. Advances in Wireless Communications and Applications,2021,191(7):229-235.
[17]溫詩鑄,黃平. 摩擦學原理[M]. 北京:清華大學出版社,2002.
[18]程光顯,張士峰. 導彈落點精度的鑒定方法——概率圓方法[J]. 國防科技大學學報,2001,23(5):13-16.
[19]馬康. 基于Bayes小子樣理論的艦炮彈丸落點散布方差估計[J]. 艦船電子工程,2014,34(6):120-124.
[20]呂棟雷,曹志耀,鄧寶,等. 利用方差分析法進行模型驗證[J]. 計算機仿真,2006,23(8):46-48.
[21]曹晉華,程侃. 可靠性數學引論[M].北京:高等教育出版社,2006.
Factors Influencing Testability of the Launch Mechanism for Shooting Robots Using DOE Method
XING Linqiao,HE Liping,SUO Haoliang,LIU Jing
( School of Mechanical and Electrical Engineering, University of Electronic Science and Technology of China,Chengdu 611731, China)
To overcome the problems of low accuracy of projectiles striking and large fluctuation in the current launching mechanism for shooting robots, a DOE-based method is proposed to study the friction wheel launching mechanism and to design and analyze the performance of the shooting robot’s launching mechanism. Firstly, after analyzing the kinematic relationship of the launching mechanism, the projectile launching acceleration model is established by using the Hertzian contact theory. Three main controllable factors are determined—the radius of the friction wheel, the material properties and the maximum unilateral interference. And then test impact factors are selected. Secondly, a test design is conducted for the three controllable factors and the impact model is provided to optimize the parameters of the influencing factors of the launching mechanism. Meanwhile, variance analysis is adopted to verify the significance of the influence of the friction wheel material and the maximum unilateral interference on the projectile launching. Finally, the testability analysis of the design parameters is carried out, and the performance of the projectile launching mechanism is validated under different test conditions. The experimental results show that the initial launch velocity of the projectile reaches 28 m/s and the probability of hitting a stationary target is 97%. It meets the requirements of projectile launching index and ensures the accuracy and stability of the shooting robot's launching.
robot launching mechanisms;testability;influencing factors;parameter selection;variance analysis
O212.6
A
10.3969/j.issn.1006-0316.2022.11.003
1006-0316 (2022) 11-0018-10
2022-04-21
國家自然科學基金重點項目(61833002);教育部產學合作協同育人項目(202101204003);四川省2018-2020年高等教育人才培養質量和教學改革項目(JG2018-224)
幸琳喬(1997-),男,江西宜春人,碩士研究生,主要研究方向為機器人信息融合與可靠性評估,E-mail:xing_linqiao@std.uestc.edu.cn。*通訊作者:何俐萍(1973-),女,四川德陽人,博士,教授,主要研究方向為智能機器人系統可靠性與安全性分析、壽命預測與健康評估、不確定性人工智能等,E-mail:lipinghe@uestc.edu.cn。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04