基于聲學原理的TDOA算法聲音定位實驗裝置
2022-02-03 08:19:12朱思陶李澤旭鄭淇峰
中國新技術新產品 2022年20期
朱思陶 李澤旭 鄭淇峰
(沈陽師范大學物理科學與技術學院,遼寧 沈陽 110034)
1 研究背景與目標定位
1.1 研究背景
噪聲和異響在日常生活和工業生產中很常見,例如,汽車行駛過程中的異常嘯叫聲,出現故障的機器發出的異常響動。要解決這些實際問題,首先需要精準地找到故障位置,確定出現異常的設備或者部件。
1.2 目標定位
該實驗裝置是基于人耳聽覺機理的聲源定位系統來計算聽覺場景分析提出的,也是根據聲源發出的聲波到達所用器材處的時間差異來確定聲源的位置,綜合運用物理基礎概念原理、算術手段和電子技術程序,從而實現對靜止或者運動的聲源物體進行精準定位的功能。
具體目標如下:1)設計1 組裝置,精準探測發聲物體的位置。2)探究當麥克風陣列方式不同、陣列相同但是3 個位點間距不同時對定位精準度的影響。3)分析聲源在不同分貝條件下的定位效果(取10 個響度環境,分別為10%、20%、30%、40%、50%、60%、70%、80%、90%和100%。通過單片機的PWM 引腳控制響度,并在1m×1m 的空間內進行試驗)。4)分析當聲源處于運動情況(變速或勻速均考慮)時,經過多普勒效應修正后,定位角度的偏差情況。
2 試驗原理細分與算法設計
聲源分為相對接收點靜止或運動2 種情況,對相對運動的情況來說,該試驗使用多普勒效應修正的方法。
原理概述:聲波以一定速度在空氣中傳播,到達設置的不同位置,聲音傳感器的相位不同,根據這些聲音傳感器對同一聲波記錄的相位差別可以求得同一聲波到每個聲音傳感器的時間差值。
得到該時間差后,利用TDOA 算法便可以確定這個聲源處于雙曲面焦點上。該試驗采用3 個聲音傳感器陣列。此外,試驗環境的溫度、濕度、風速和聲源相對聲音傳感器的運動狀態都會影響定位結果。因此,該設計考慮相關物理修正公式,并代入MATLAB 程序中,實現更精準定位的目標。
2.1 聲音傳播原理
聲波是一種空間傳播方式。聲源體發生振動會引起四周空氣振蕩,那種振蕩方式就是聲波,聲波借助空氣向四面八方傳播。
2.2 溫濕度條件下的聲速測量原理和修正
聲速與聲源的性質無關,只與媒質的彈性、密度及溫度有關。
聲速在溫度濕度下的修訂如公式(1)所示。

式中:γ為空氣的定壓比熱容和定容比熱容之比;T為環境溫度;P0為濕空氣的壓力;?為濕空氣的相對濕度;Psb曲為飽和水蒸氣分壓力[1]。
2.3 在風速環境下對定位結果進行修正
風速環境對三維空間聲音傳播的仰角和方位角有影響,修正公式如公式(2)和公式(3)所示。
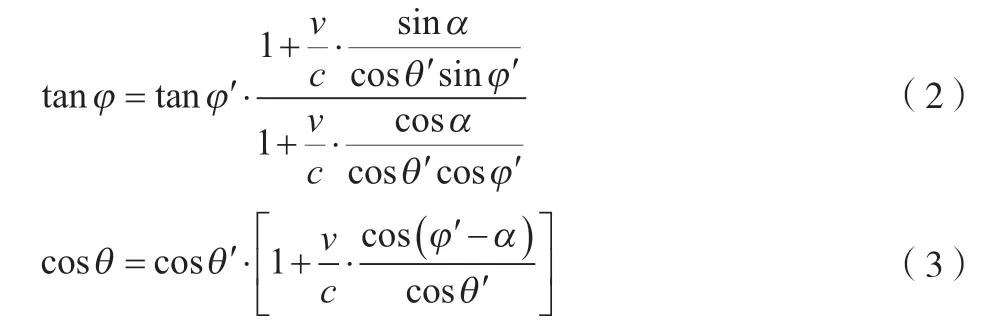
式中:α為風的方向角;φ為方向角實際位置;φ'為計算位置;θ為仰角實際位置;θ'為仰角計算位置;v為聲源運動速度;c為光速。
利用這一定位關系,仿照前面的推導過程就可以得出在實際的氣象條件下聲源定位的坐標。
2.4 對聲源和接收點有相對運動的情況的多普勒效應分析
聲源定位時,如果其處于運動狀態,則需要在消除接收到的聲信號的多普勒效應后,再進行定位計算。
當波的傳播方向、波源及接收器速度不共線時,可以推出多普勒效應的普適公式,如公式(4)所示。

式中:f0為波源頻率;f為接收器收到的頻率;u為波在介質中的傳播速度;vs、vr分別為波源及接收器速度;θ、φ分別為vs、vr與接收器到波源的連線的夾角。
機械波的多普勒效應公式如公式(5)所示。

式中:f '為觀察者接收到的頻率;V為波的傳播速度。
光波的多普勒效應公式如公式(6)所示。

機械波的多普勒效應公式是設觀察者與波源沿在同一直線運動,它們相對媒介的速度分別為v和u,波的傳播速度為V,波源發出的頻率為f,而觀察者接收到的頻率為f ',如公式(7)所示。

v>0 或v<0 分別表示觀察者趨近或背離波源,而u>0 或u<0 分別表示波源趨近或背離觀察者[2]。
2.5 蜂鳴器發聲原理
基于該實驗器材選擇的有源自激型蜂鳴器,其工作發聲原理是直流電源輸入經過振蕩系統的放大取樣電路,在諧振裝置作用下產生聲音信號。
2.6 Chan 算法(非遞歸雙曲線方程組解法)
Chan 算法是到達時間差(The Time Differences Of Arrival,TDOA)定位方法中的一個很好用的方法。
Chan 算法是非遞歸雙曲線方程組解法,具有解析表達式解,主要特點是當測量誤差服從理想高斯分布時,它的定位精度高、計算量小,并且可以通過增加已確定點的數量來提高算法的精度。
該算法的推導前提是基于測量誤差為零均值高斯隨機變量,對實際環境中誤差較大的測量值來說,例如在有非視距誤差的環境下,該算法的性能會顯著下降。該設計采用3 個點參與定位的方式[3]。
3 裝置元件
試驗所需材料為ArduinoUNO 單片機1 個,風速測量儀1 個,聲音傳感器模塊1 個,溫濕度傳感器1 個,有源蜂鳴器1 個,無源蜂鳴器1 個,OLED 顯示模塊1 個,杜邦線若干條,亞克力保護盒1 個,定制鋁合金外殼1 個,自制拼接運動小車1 個。
4 主要模塊分析
4.1 溫濕度傳感器模塊
檢測試驗場地所在環境的溫、濕度,并將數據作為配置程序的依據,調節程序中的聲速,以降低試驗誤差。
4.2 聲音接收模塊
采用音頻處理芯片LM386,可以將音頻信號放大200 倍,可以判斷聲音的有無及聲音強度的大小且靈敏度可調,還可以配合程序對檢測的聲音進行降噪處理。
4.3 單片機核心部分
單片機作為核心部分,可以配合各種編程語言來監視和獲取某些輸入,執行高速計算,分析并生成輸出,以控制各種設備。
4.4 OLED 顯示模塊
顯示測得的數據,實現數據可視化的目標,以加快信息的傳遞速率。
5 試驗步驟設計
5.1 試驗步驟
5.1.1 二維平面
5.1.1.1 聲源物體相對聲音傳感器靜止
在二維平面下,當聲源物體相對聲音傳感器靜止時的試驗步驟如下:1)尋找周圍環境較安靜的場地,擺放并調試裝置,隨意取1 個點作為坐標原點(0,0)。2)測量并記錄周圍溫度、濕度和風速環境參數,將其代入相關物理修正公式及設計好的MATLAB 程序中。3)隨意放置蜂鳴器(模擬待定位發聲物體)。4)依次選擇“直角三角形陣列”、“等邊三角形陣列”和“隨意三點陣列”的聲音傳感器(麥克風)布局方式進行擺放。3 個點的坐標依次設為(x1,y1)、(x2,y2)和(x3,y3)。5)每種陣列方式進行3 次試驗,每次3 個麥克風位點的間距不同。6)打開電源啟動裝置,3 個聲音傳感器(麥克風)自動測得收到聲波時的時間t1、t2和t3。7)自動記錄t1、t2和t3,同時計算t1-t2、t2-t3和t1-t3的值,并將其代入MATLAB 程序中,最終經過單片機運行、分析得出發聲物體所在位置的坐標。8)通過OLED 顯示屏和電腦屏幕均可以讀取聲源位點,找到位點位置,與實際位點位置進行比對,分析誤差距離。
5.1.1.2 聲源物體相對聲音傳感器的運動情況
在二維平面下,檢測聲源物體相對聲音傳感器運動情況的試驗步驟如下:1)尋找周圍環境較安靜的場地,擺放并調試裝置,隨意取1 個點作為坐標原點(0,0)。2)測量并記錄周圍溫度、濕度和風速環境參數,將其代入相關物理修正公式及設計好的MATLAB 程序中。3)隨意放置蜂鳴器(模擬待定位發聲物體)。4)依次選擇“直角三角形陣列”、“等邊三角形陣列”和“隨意三點陣列”的聲音傳感器(麥克風)布局方式進行擺放。3 個點的坐標依次設為(x1,y1)、(x2,y2)和(x3,y3)。5)每種陣列方式進行3 次試驗,每次3 個麥克風位點的間距不同。6)打開電源啟動裝置。首先,3 個聲音傳感器(麥克風)自動測得收到聲波時的時間t1、t2和t3。間隔5 s 后,系統第二次測量得到數據t4、t5和t6。7)系統自動記錄t1~t6,同時計算兩兩時間差,并代入MATLAB 程序中,最終經過單片機運行、分析得出發聲物體運動過程中的2 個坐標位置,從而確定大致運動方向。8)通過OLED顯示屏和電腦屏幕均可以讀取運動大致軌跡,與實際聲源軌跡路徑位置進行對比,分析誤差角度或距離。
5.1.1.3 分析聲源在不同分貝條件下的定位效果
在二維平面下,分析聲源在不同分貝條件下的定位效果的試驗步驟如下:1)尋找周圍環境較安靜的場地,擺放并調試裝置,隨意取1 個點作為坐標原點(0,0)。2)測量并記錄周圍溫度、濕度和風速環境參數,將其代入相關物理修正公式及設計好的MATLAB 程序中。3)隨意放置蜂鳴器(模擬待定位發聲物體)。4)取10 個響度環境,分別為10%、20%、30%、40%、50%、60%、70%、80%、90%和100%。通過單片機的PWM 引腳控制響度,并在1m×1m 的空間內進行試驗。依次選擇“直角三角形陣列”、“等邊三角形陣列”和“隨意三點陣列”的聲音傳感器(麥克風)布局方式進行擺放。3 個點的坐標依次設為(x1,y1)、(x2,y2)和(x3,y3)。5)每種陣列方式進行3 次試驗,每次3 個麥克風位點的間距不同。
打開電源啟動裝置,3 個聲音傳感器(麥克風)自動測得收到聲波時的時間t1、t2和t3。6)系統自動記錄t1、t2和t3,同時計算t1-t2、t2-t3和t1-t3的值,并將其代入MATLAB 程序中,最終經過單片機運行、分析得出發聲物體所在位置坐標。7)通過OLED 顯示屏和電腦屏幕均可以讀取聲源位點,找到位點位置,與實際位點位置進行對比,分析誤差距離。
5.1.2 三維空間
5.1.2.1 聲源物體相對聲音傳感器靜止
在三維空間中,分析聲源在不同分貝條件下的定位效果的試驗步驟如下:1)尋找周圍環境較安靜的場地,擺放并調試裝置(進行降噪處理),隨意取1 個點作為坐標原點(0,0,0)。2)測量并記錄周圍溫度、濕度和風速環境參數,將其代入相關物理修正公式及設計好的MATLAB 程序中。3)隨意放置蜂鳴器(模擬待定位發聲物體)。4)將三維空間降解為3 個二維平面進行處理,即xOy平面、xOz平面和yOz平面。5)在這3 個平面分別測出聲源物體在3 個平面的對應投影坐標(a1,b1)、(a2,c1)和(b2,c2),這里在每個平面的測量方法與二維平面相同。6)最終三維空間中的聲源位置為。7)將試驗得到的坐標位置與實際聲源坐標位置進行對比,分析誤差距離。
5.1.2.2 聲源物體相對聲音傳感器的運動情況
在三維空間中,對聲源物體相對聲音傳感器運動情況的試驗步驟如下:1)尋找周圍環境較安靜的場地,擺放并調試裝置(進行降噪處理),隨意取1 個點作為坐標原點(0,0,0)。2)測量并記錄周圍溫度、濕度和風速環境參數,將其代入相關物理修正公式及設計好的MATLAB 程序中。3)隨意放置蜂鳴器(模擬待定位發聲物體)。4)將三維空間降解為3 個二維平面處理,即xOy平面、xOz平面和yOz平面。5)每個平面采用與二維平面相同的方法。打開電源啟動裝置后,在3 個平面依次測得聲源的3 個投影坐標,取平均值得到聲源第一次探測的坐標。6)運動5 s 后,系統進行第二次探測,在3 個平面再次測得聲源的投影位置坐標,再取平均值,得到運動5 s 后的聲源坐標。7)通過2 次坐標點就可以確定聲源的運動軌跡,與實際聲源軌跡路徑位置進行對比,分析誤差角度或距離。
5.1.2.3 分析聲源在不同分貝條件下的定位效果
在三維空間中,分析聲源在不同分貝條件下的定位效果的試驗步驟如下:1)尋找周圍環境較安靜的場地,擺放并調試裝置(進行降噪處理),隨意取1 個點作為坐標原點(0,0,0)。2)測量并記錄周圍溫度、濕度和風速環境參數,將其代入相關物理修正公式及設計好的MATLAB 程序中。3)隨意放置蜂鳴器(模擬待定位發聲物體,取10 個響度環境,分別為10%、20%、30%、40%、50%、60%、70%、80%、90%和100%。通過單片機的PWM 引腳控制響度,并在1m×1m×1m 的空間內進行試驗)。4)將三維空間降解為3個二維平面進行處理,即xOy平面、xOz平面和yOz平面。5)分別測出聲源物體在3 個平面的對應投影坐標(a1,b1)、(a2,c1)和(b2,c2),這里在每個平面的測量方法與二維平面相同。6)最終三維空間中的聲源位置為。7)將試驗得到的坐標位置與實際聲源坐標位置進行對比,分析誤差距離。
溫度、濕度和風力環境條件見表1。

表1 溫度、濕度和風力環境條件(前提條件為標況下)
由理論初步判斷不可以采取“一排形式的麥克風陣列”,其相對原理使用的TDOA 算法缺少1 個維度,無法形成雙曲線焦點,進而無法定位。
5.2 試驗結論
基于聲音探測定位原理,綜合考慮各影響因素,通過修正物理和數學公式、設計電子設備和程序初步得出以下3個試驗結論:1)該實驗裝置基本實現在5 m×5 m 范圍內的精準聲源位置測定功能,誤差大約為±5 cm。同時,在試驗中進行降噪處理,效果較好。2)針對不同麥克風陣列形式,得出“直角三角形陣列”精準度最高的結論,其誤差大約為0.5cm。等邊三角形陣列”的誤差大約為0.9 cm。“一般三角形陣列”的誤差最大,大約為3.3 cm。在同一陣列形狀中,3個位點間距對位置探測誤差影響在5 m 內可以忽略不計。3)在蜂鳴器(模擬聲源物體)相對聲音傳感器(麥克風陣列)運動的條件下,基于多普勒效應修正公式的引入,測得聲源運動試驗與實際誤差偏角和距離偏小,效果良好。4)在聲音響度低于30%的情況下,誤差值變化幅度很大,且試驗位置與實際位置的誤差值偏大,最大偏差值達5 cm。
在聲響高于30%的部分變化緩慢,且誤差值偏小。同時,隨著響度的提高,誤差值逐漸減小,當響度達到100%時,誤差值最小可達到0.3 cm。
6 裝置創新與優勢
該文設計的裝置創新和優勢如下:1)將物理中的聲學知識與時間差測距離的方法及電子技術完美結合,體現了物理思想的運用和電子結合的靈活化。2)探究角度獨特全面。綜合分析了不同麥克風陣列形式、聲源不同運動狀態、不同噪聲程度和不同環境因素(溫濕度、風速)下聲源位置定位的精準度。3)4 個主要模塊密切耦合,確保信息高效、準確,并且整體試驗裝置靈活、小巧且實用,可應用范圍廣泛。
7 結語
通過試驗驗證,該設計的目標功能基本可以實現,即可以實現小范圍內精準定位聲源位置的目標,降噪方面也具有較好的效果,還對物體相對運動情況進行誤差分析。綜上所述,基本達到試驗預期效果。
