
基于激光雷達技術的無人機電網基建管控系統
2018-01-22 00:46:54李冰林宇龍黃珣王明淵趙思遠
現代電子技術 2018年2期
關鍵詞:無人機
李冰+林宇龍+黃珣+王明淵+趙思遠
摘 要: 針對傳統人工肩扛經緯儀的輸電線路測量方法效率和精度較低的問題,提出基于激光雷達的無人機電網基建管控系統。該系統包括飛行設計、數據采集、數據預處理、數據后處理和三維建模等流程。首先,使用無人機和激光雷達采集輸電線路與塔桿數據;然后,分別使用數據預處理和后處理技術來修正激光雷達的測量誤差以及分類點云數據,以提高測量精度;最后,導出生成的DOM,DSM文件和三維仿真模型以保存測量數據。仿真測試結果表明,該系統具有較高的測量效率及精度,可以滿足電網快速發展的需求。
關鍵詞: 電網; 基建管控; 無人機; 激光雷達; 點云; 輸電線
中圖分類號: TN835?34; TM76 文獻標識碼: A 文章編號: 1004?373X(2018)02?0099?03
Abstract: In allusion to the problem that the transmission line measurement method of the traditional shoulder?mounted theodolite has low efficiency and precision, an infrastructure management and control system for UAV (unmanned aerial vehicle) grid based on laser radar is proposed. The system includes the procedures of flight design, data acquisition, data postprocessing and 3D modeling. The UAV and laser radar are used to collect transmission line and tower data. The data preprocessing and postprocessing technologies are used to correct laser radar measurement errors and classified point cloud data to improve measurement accuracy. The generated DOM, DSM files and 3D simulation model are exported to save the measurement data. The simulation results show that the system has a high measurement efficiency and precision and can meet the rapid development of power grids.
Keywords: power grid; infrastructure management and control; UAV; laser radar; point cloud; power transmission line
0 引 言
隨著國民經濟和電力建設的快速發展,如何有效地管理龐大的電力網絡并保證其正常運行變得越發重要[1]。輸電線路作為電網的毛細血管,對電能輸送起著不可替代的作用[2?5]。然而,傳統人工肩扛經緯儀的輸電線路測量方法已無法匹配電網的建設速度。并對于跨越高速公路、高速鐵路和重要輸電通道的架空輸電線路區段,傳統的測量方法效率和精度均較低[6?7]。因此,需要提出和發展新的高效、高精度的測量方法。
目前,基于無人機的測量技術包括傳統攝影測量技術[8]、傾斜攝影技術[9]和激光雷達技術[10]。由于傳統攝影測量技術只能獲取線路的圖片,易受遮擋影響,測量精度低,故較少使用。而基于傾斜攝影技術的測量方法,首先使用固定翼無人機獲取傾斜影像數據。然后,使用攝影測量原理對獲取的數據進行多視匹配和自動賦予紋理來構建三維模型。該方法雖具有較高的時效性,但得到的圖片表觀不夠精細。機載激光雷達以激光脈沖作為測量媒介,能同步采集高分辨率圖像和高精度激光點云,是一種新的遙感測量技術。其不僅可以快速地獲取輸電線路的三維坐標,且還具有穿透植被的特點,能獲取地表信息。
使用激光雷達測量觀測鐵塔、通道、相間間隔棒和導線等設備的運行狀態;可以建立線路走向、變電站和鐵塔的電子臺賬;監測線路安全和絕緣距離,對電網的安全運行具有實際意義。
綜上所述,本文構建了基于激光雷達的無人機電網基建管控系統。
1 電網基建管控系統設計
基于激光雷達的無人機電網基建管控系統,使用無人機和激光雷達獲取輸電線路走廊范圍的地理數據,并生成數字正射影像(DOM)、數字高層模型DEM和數字表面模型(DSM),從而構建線纜與高壓鐵塔的3D模型。具體工作流程如圖1所示,包括飛行設計、數據采集、數據預處理、數據后處理和三維建模5個功能模塊。
1.1 飛行設計
飛行設計包括激光雷達設備和無人機的選擇、安裝與調試。同時,在采集數據前需要勘探測量區域,選擇并建立GPS基站,以準確獲取GPS信息。本文選用多翼或固定翼無人機,搭載TopSYS Harrier 68i激光雷達系統進行數據的采集。為了充分利用設備優勢,在飛行時綜合考慮了線路走廊范圍內的地勢、地形和高度差等情況。
1.2 數據采集
本系統按照30%~40%的重疊度采集輸電線路兩側各100 m的高分辨率圖像、IMU觀測數據和點云數據,并實時獲取無人機的GPS數據。在采集數據時,操作人員需使用手持設備實時監測GPS信號、影像質量、回波接收和實時天氣狀況以及時采取有效措施應對意外情況。同時,為了保證GPS數據和點云數據的完整性,需要及時檢查數據文件的大小與數量。本文系統采集到的部分點云數據如圖2所示。endprint
1.3 數據預處理
數據預處理即使用同步采集的GPS數據和IMU數據對無人機進行定位、定向,并需要基于系統的參數校準原始點云數據。
本系統使用差分法來測定GPS數據和IMU數據的相對測量誤差以及空間相關性誤差,來獲取高精度GPS數據。準確定位數據后,聯合系統的參數和定位信息獲取無人機的航跡文件,并為每一個點云賦予坐標值,從而定向點云數據。
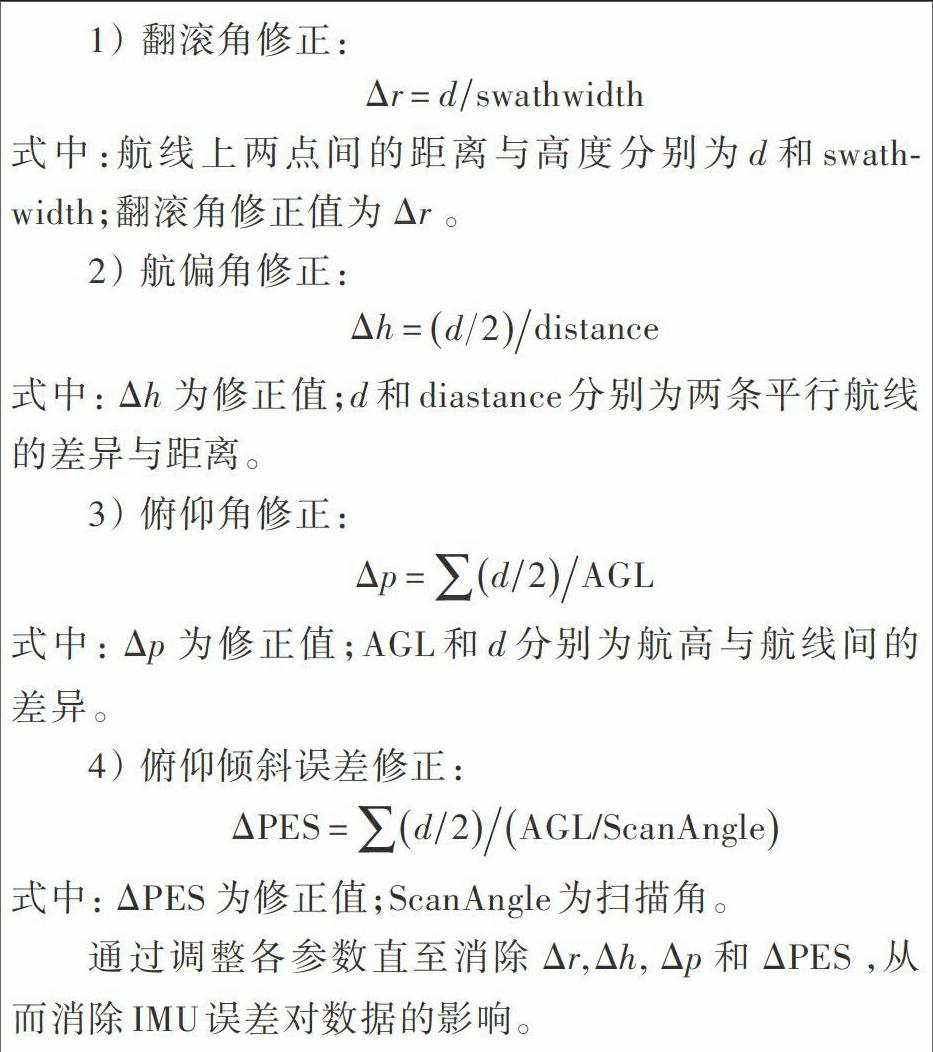
為了進一步修正激光雷達的姿態角導致的誤差,本文分別校驗了翻滾角、航偏角、俯仰角和俯仰傾斜誤差,計算公式如下:
1) 翻滾角修正:
式中:航線上兩點間的距離與高度分別為d和swathwidth;翻滾角修正值為。
2) 航偏角修正:
式中:為修正值;d和diastance分別為兩條平行航線的差異與距離。
3) 俯仰角修正:
式中:為修正值;AGL和d分別為航高與航線間的差異。
4) 俯仰傾斜誤差修正:
通過調整各參數直至消除和,從而消除IMU誤差對數據的影響。
1.4 數據后處理
數據后處理包括激光點云分類和DEM,DOM文件的制作。激光點云分類即從點云數據中分別提取地表、電力線、高壓塔和建筑物等類別信息,具體流程如圖3所示。點云數據分類前需要使用Terraphoto軟件將巨大的點云數據分割成大小相當的塊,每塊包含約100~200 MB的點云數據。分塊完成后,使用TerraSolid軟件的算法進行自動分類。
1.5 三維建模
制作完成點云數據的DEM和DOM文件后,即可組合桿塔模型與線路模型得到最終的三維模型。即融合高分辨率圖片和點云數據,進行紋理貼圖對桿塔及電力線進行精確建模。
本文使用3ds MAX對點云數據建模,并繪制規則形體的剖面。然后,將桿塔模型和線路集成到Alatu Earth軟件中得到更為精確的模型。
2 系統實現與結果分析
實現完成電網基建管控系統的數據采集和分析等過程后,可得到如圖4所示的三維建模效果圖。為了方便管理、查詢和分析相關數據,本文基于Windows系統進行開發搭建了電網基建管控C/S系統,主要實現了數據模型導入、輸電設備管理和數據監測分析等功能。數據模型導入功能使用SQL Server數據庫存儲DEM和DOM文件,并使用數據組織與壓縮、多級緩存和下載平衡技術,實現大量數據靈活且緊湊的存儲。使用輸電設備管理功能可以方便地進行線路管理,通過選擇圖形操作、電壓等級和線路名稱等實現對輸電線路、線路塔桿以及輸電電纜的查詢與維護。該功能模塊也具有統計功能,方便用戶根據線路負荷記錄和路徑匯總統計各個區域的電網接線,以及開展巡視工作。數據監測功能模塊用于檢測線路的危險點,通過測量三維模型中電力線與周圍物體的距離,確定線路是否安全,以防植被過高或交叉跨線導致的輸電事故。
將本文設計的系統應用于某電廠的實際測試結果表明,該系統能有效解決傳統人工管理的弊端,且具有明顯的經濟優勢:能縮短運行周期,減少巡視人員和巡視成本;能精確測量各線路及其周邊建筑如樹、竹等,不僅能減少運維時對樹木的砍伐,而且能減輕人工測量成本,并保護環境;能降低線路增容期間的線路交跨測量工作。
3 結 語
本文針對傳統人工肩扛經緯儀的輸電線路測量方法效率和精度均較低的問題,提出了基于激光雷達的無人機電網基建管控系統。該系統使用無人機和激光雷達實現了飛行設計、數據采集、數據預處理、數據后處理和三維建模等功能。實驗結果表明,該系統具有較高的測量效率和精度,并能方便進行線路管理,可滿足電網快速發展的需求。
參考文獻
[1] 周琴.電力基建管理信息系統深化應用探討[J].重慶電力高等專科學校學報,2017,22(3):54?56.
ZHOU Qin. A study on the deepened application of the management and information system for power infrastructure construction [J]. Journal of Chongqing Electric Power College, 2017, 22(3): 54?56.
[2] 袁廣朝.基于JBPM的電力基建管理系統的設計與實現[D].大連:大連海事大學,2016.
YUAN Guangchao. Design and implementation of power infrastructure management system based on JBPM [D]. Dalian: Dalian Maritime University, 2016.
[3] 周全.電力基建工程安全管理改進研究[D].杭州:浙江工業大學,2012.
ZHOU Quan. Research on the improvement of safety management of power infrastructure project [D]. Hangzhou: Zhejiang University of Technology, 2012.
[4] 程亮,胡衛利,胡蔚,等.電網基建項目投資決策方法研究[J].電網與清潔能源,2014,30(12):84?90.
CHENG Liang, HU Weili, HU Wei, et al. Decision making on the construction investment of a power grid project [J]. Power system and clean energy, 2014, 30(12): 84?90.endprint
[5] 呂磊.在電網基建工程安全管理中應用層次分析法的對策[J].通訊世界,2016(24):125?126.
L? Lei. The application of analytic hierarchy process in the safety management of power network infrastructure engineering [J]. Telecom world, 2016(24): 125?126.
[6] 胡衛利,程亮,馬倩,等.基于改進粒子群組合算法的電網基建年度投資預測[J].電網與清潔能源,2014,30(11):52?56.
HU Weili, CHENG Liang, MA Qian, et al. Prediction of annual power grid infrastructure investment based on hybrid algorithm of improved PSO [J]. Power system and clean energy, 2014, 30(11): 52?56.
[7] 呂立蕾.無人機航攝技術在大比例尺測圖中的應用研究[J].測繪與空間地理信息,2016,39(2):116?118.
L? Lilei. Application research of UAV aerial photography technology in large scale mapping [J]. Geomatics & spatial information technology, 2016, 39(2): 116?118.
[8] 何原榮,鄭淵茂.無人機航拍技術配合遙感的海岸帶規劃應用[J].現代電子技術,2015,38(23):24?27.
HE Yuanrong, ZHENG Yuanmao. Application of UAV remote sensing aerial photo technology in coastal zone planning [J]. Modern electronics technique, 2015, 38(23): 24?27.
[9] 黃權,李立欣,高昂,等.基于Runge?Kutta法的小型無人機姿態角算法研究[J].電子設計工程,2017,25(11):133?136.
HUANG Quan, LI Lixin, GAO Ang, et al. Evaluating small UAV attitude angle based on Runge?Kutta algorithm [J]. Electronic design engineering, 2017, 25(11): 133?136.
[10] 丁家如,杜昌平,趙耀,等.基于改進人工勢場法的無人機路徑規劃算法[J].計算機應用,2016,36(1):287?290.
DING Jiaru, DU Changping, ZHAO Yao, et al. Path planning algorithm for unmanned aerial vehicles based on improved artificial potential field [J]. Journal of computer applications, 2016, 36(1): 287?290.endprint
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
