大口徑中波紅外輻射特性測量系統標定
2022-01-25 10:26:00劉齊悅
電子設計工程 2022年2期
姚 源,劉齊悅
(1.中國人民解放軍91245 部隊,遼寧 葫蘆島 125001;2.中國人民解放軍92941 部隊43 分隊,遼寧 葫蘆島 125001)
目標以高超音速再入大氣層時,由于強大的空氣阻力和大氣摩擦,表面被一層炙熱的氣體所包圍,此時目標的紅外輻射就不僅僅是目標本身的紅外輻射。研究彈頭及其鄰域流場所組成的系統的總的紅外輻射,對目標的紅外識別及紅外特征抑制起很重要的作用[1-2]。
采用地基大口徑紅外輻射特性測量系統對目標紅外輻射特性進行測量是目前獲取目標及其流場紅外輻射特性參數的主要手段。由于目標及其流場溫度在飛行過程中隨著速度、海拔高度的變化劇烈,要求測量系統動態范圍滿足要求,因此經常采用調整紅外探測器積分時間的方式來提高動態范圍。
為了準確地對目標中波紅外輻射特性進行測量,必須對整個測量系統進行標定。羅茂捷等提出考慮積分時間變量的紅外系統輻射響應定標[3],采用間接擴展源法對IRFPA 系統進行標定,標定過程用到平行光管,但平行光管成本高,運輸不便,在對大口徑輻射測量系統進行外場標定時不適用。孫志遠等提出了400 mm 口徑短波紅外輻射定標的內外標定方法[4],對超過400 mm 大口徑中波紅外輻射特性測量系統的標定沒有驗證。
該文通過利用面源黑體覆蓋測量系統入瞳的方式,測定出大口徑(口徑大于400 mm)中波紅外輻射特性測量系統在探測器設定不同積分時間下的標定系數。推導出基于積分時間參數變量的輻射強度標定公式,通過多次標定實驗數據對標定公式進行驗證,取得了很好的標定結果,能夠滿足目標實際的測量精度要求。另外該文還分析了整個輻射特性測量系統與積分時間和黑體輻射強度緊密相關的像元輸出灰度值的飽和特性,便于在測量輻射強度變化劇烈再入目標時動態調整相應的系統參數設置,準確的測量目標輻射特性。
1 系統設計
光學系統設計采用大口徑卡塞格林系統和牛頓式系統相結合的主光學系統方案。系統除了具有目標紅外輻射特性測量功能,同時還配備可見光探測器實現目標可見景象記錄功能。采用透射可見光、反射紅外的光譜分光方式分光,實現可見光與中波紅外共口徑并且同時使用。
中波紅外探測器采用制冷型HgCdTe 焦平面陣列,像元數為640×512,探測器波段范圍為3.7~4.8 μm,輸出位數為14 位。光學系統設計焦距為1 600 mm。面源黑體采用以色列CI 公司的SR800 擴展面源黑體,黑體輻射面尺寸為900 mm×900 mm,大于光學系統孔徑,發射率不小于0.97,溫度精度為0.3%。
在標定時,面源黑體通過升降車升起覆蓋整個光學系統入瞳,正常測量目標輻射特性時,移開黑體及升降臺。標定示意圖如圖1 所示。

圖1 標定示意圖
2 輻射標定公式
標定采用近距離面源黑體標定方法。原理示意圖如圖2 所示。
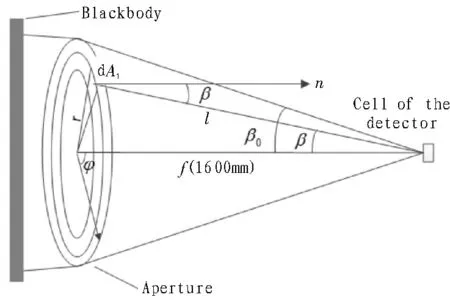
圖2 探測器像元的輻照度原理圖
取環狀面源:

則環狀面源在像元上的輻照度計算式如式(2)所示:

探測器像元(i,j)接收到的黑體輻照度的計算公式如式(3)所示:

式中,τsys為整個系統的透過率,其中Lb為黑體輻射亮度,利用普朗克黑體輻射公式計算如式(4)所示:

式中,λ1~λ2為探測器的響應波段范圍,c1、c2為普朗克輻射常數,T為設定的黑體溫度。
采用基于積分時間變量的簡化方法,探測器像元灰度值和目標紅外輻射強度的對應關系分別如式(5)、(6)所示。

式中,ki,j是需要標定的響應增益系數參數,kc為比例系數常量,tintegration代表紅外探測器設定的積分時間,Bi,j為偏置量,主要由探測器本底噪聲、紅外雜散輻射等因素引起的探測器響應,有些文獻考慮標定過程內,環境參數變化不大,偏置量認為是常數保持不變。但事實上由于積分時間變化,與探測器像元接收到噪聲及雜散輻射通量有一定的關系,建立偏置量Bi,j的線性響應方程[4]。

3 標定實驗
3.1 標定過程
為了得到以上建立的大口徑紅外輻射測量系統的標定方程系數,進行了以下標定實驗。實驗流程如下:
1)將黑體覆蓋整個系統入瞳,設定黑體溫度;
2)溫度點分別設定為25 ℃、40 ℃、50 ℃、65 ℃、80 ℃、95 ℃、110 ℃、125 ℃、140 ℃、155 ℃、170 ℃、185 ℃;
3)待溫度穩定后,將探測器的積分時間分別設定在1 ms、1.5 ms、2 ms、2.5 ms、3 ms、4 ms,采集探測器像元響應灰度值;
4)改變黑體溫度,重復上述過程。
3.2 響應方程系數
探測器中心坐標為(320,256)的像元在不同積分時間下的響應灰度值如圖3(a)所示。
不同積分時間下,響應曲線的斜率各不相同,積分時間越大,響應的斜率也變大,像元響應灰度達到飽和時對應的輻射強度也隨之降低,可有效測量的輻射強度值降低。
這里將各積分條件下飽和點剔除(前5 點線性擬合),進行線性擬合,得到響應系數k(320,256)和B(320,256)偏置量數值如表1 所示。
根據表1 中的數值,擬合得到B(320,256)和tintegraltion的線性關系方程如下:
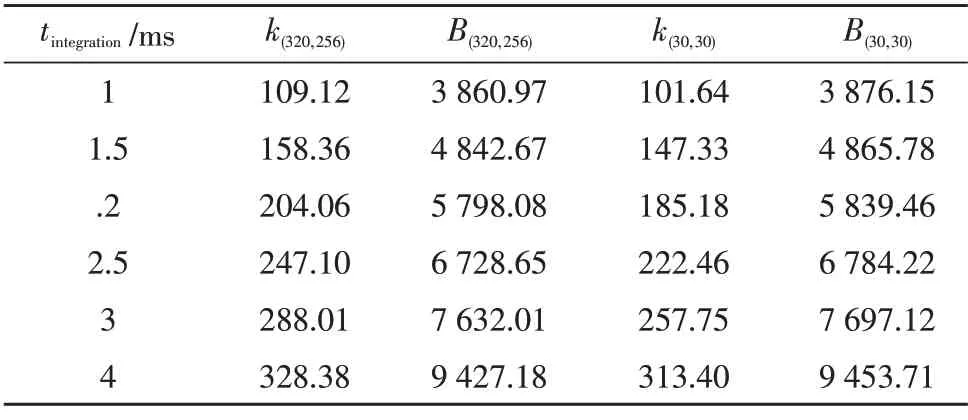
表1 (30,30)和(320,256)兩點標定系數

探測器邊緣坐標為(30,30)的像元在不同積分時間下的響應灰度值如圖3(b)所示。

圖3 響應灰度值曲線
擬合得到B(30,30)和tintegration的線性關系方程如下:

對比像元(320,256)和(30,30)兩點的響應方程系數,發現不同像元的響應系數和偏置量都不相同。兩個像元在不同積分時間下,響應系數和偏置量相對偏差如表2 所示。
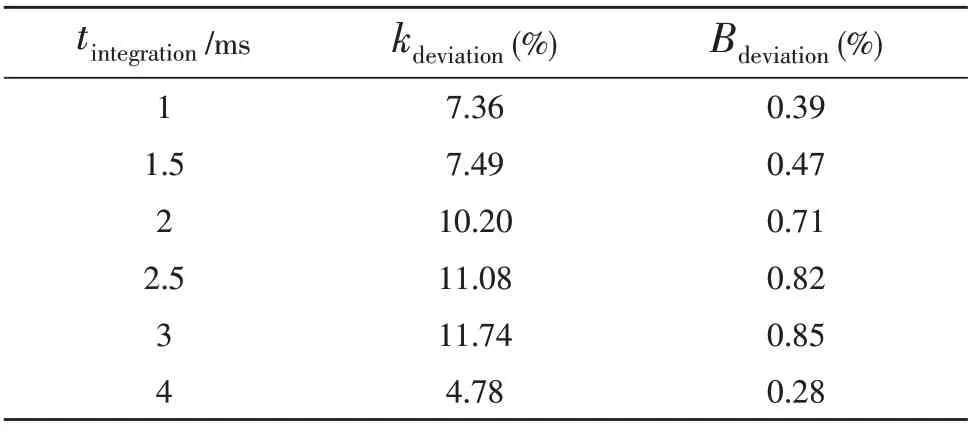
表2 像元(320,256)和(30,30)標定系數偏差
可以看出兩個不同像元的響應增益系數偏差很大,最大超過10%,而偏置量相差不大,小于1%。說明偏置量Bi,j基于積分時間的響應方程具備一定的通用性,可以作為整個探測器所有像元的標定使用[5]。
對響應的增益系數ki,j,建立標定查找表,不同區域的目標要采用相應的響應增益系數,在測量目標特性時才能得到準確可靠的目標輻射亮度值。由于面源黑體溫度從開始調節到穩定,需要很長時間,導致在標定過程中非常耗費時間,不利于實際測量任務的快速展開。因此在標定時選擇合適的溫度點,并且利用標定曲線線性度好的特點,盡量減少溫度點,簡化標定過程。
3.3 飽和特性
除了標定系統的響應方程系數,確定輻射測量系統的動態范圍也至關重要。探測器達到飽和狀態的各項參數需要標定出來,即積分時間和輻射強度各自滿足相應的條件時,探測器達到飽和狀態。探測器飽和狀態即無論在增加積分時間還是提高面源黑體的溫度,探測器輸出都保持不變,達到最大值,理論上各個像元輸出的最大值應該是16 384(214)。但實際上探測器處于飽和狀態各像元的響應值如圖4所示。各探測器像元在飽和狀態輸出灰度值都小于16 384,各個像元的響應灰度飽和值差別很大。
圖4 探測器飽和狀態
測量系統探測器中心區域像元飽和值更小,動態范圍更小,而四周區域飽和值更大,動態范圍也更大。探測器四周邊緣區域像元動態范圍比中心區域擴大近50%。
像元(320,256)和(30,30)飽和特性如圖5 所示,圖中顯示出像元輸出灰度值隨著積分時間和黑體輻射亮度增加逐漸接近飽和,前面確定的標定方程在飽和區已經失效,無法通過反演得到目標的真實輻射亮度值。
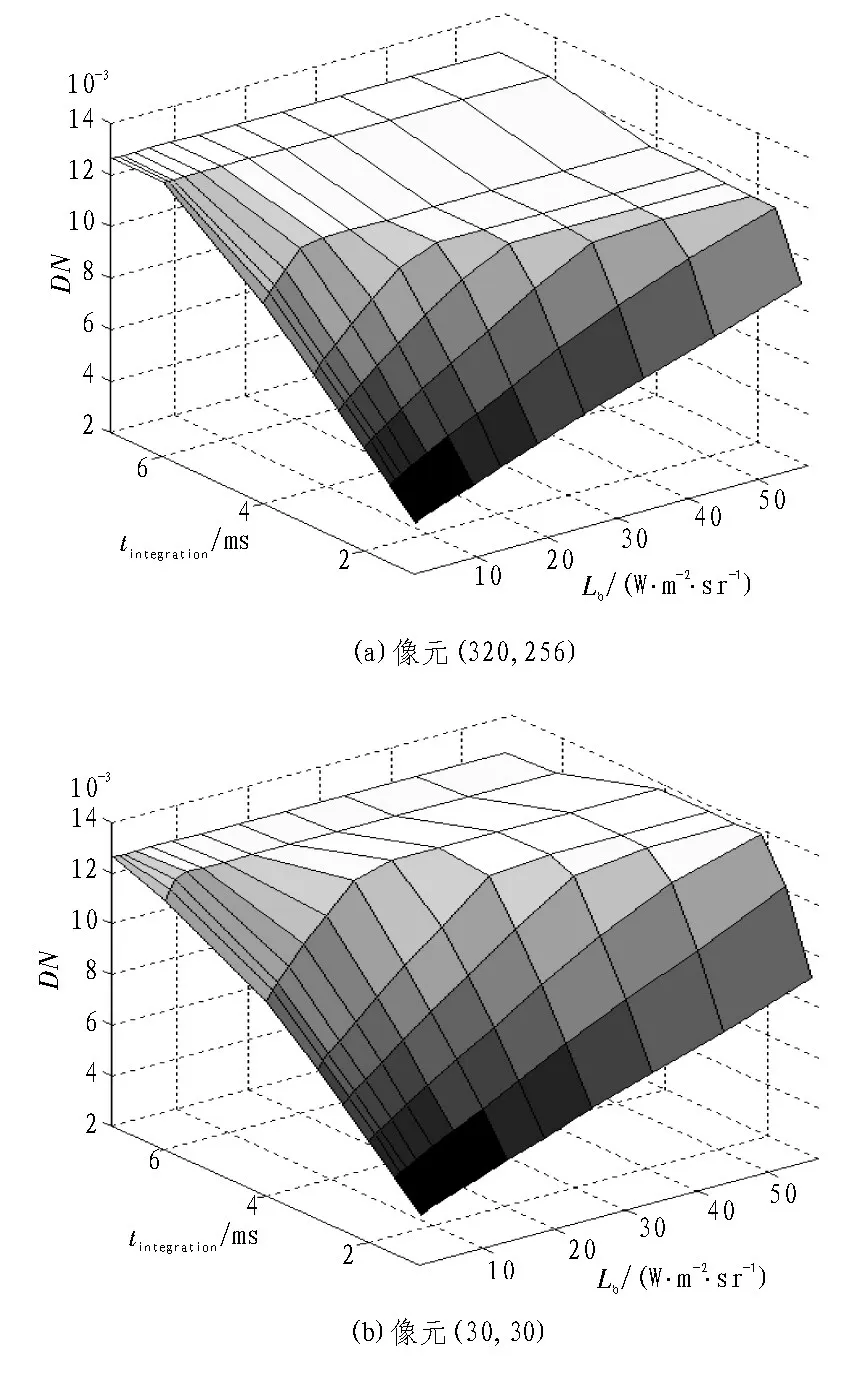
圖5 響應飽和特性
3.4 響應非均勻性對精度的影響
用探測器所有像元響應灰度值的均方根誤差(RMSE)來衡量探測器像元響應的非均勻性[6-7]。計算方法如下:

式中,----DN是整個探測器所有像元的響應灰度平均值,作為像元輸出的真值。M、N代表探測器分辨率。
從圖6 中看出,1~3 ms 積分時間下的像元灰度均方根誤差小于20,相對于響應灰度平均值偏差小于0.5%,積分時間越小,均方根誤差越小。4 ms 積分時間下均方根誤差已經超過20,并且隨著輻射亮度增加有上升趨勢,在達到飽和之前,最大時相對偏差超過10%。建議采用多點法完成紅外圖像的非均勻性校正處理[8-10]。
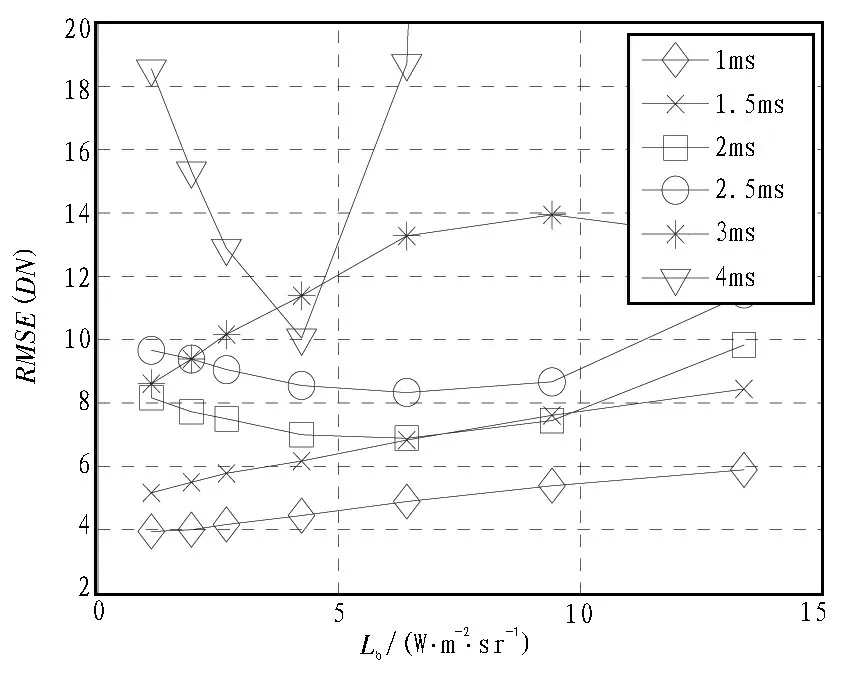
圖6 探測器像元均方根誤差
4 標定精度
為了檢驗獲得的響應曲線的擬合精度,筆者在第二天重復了上述實驗。將測量值和根據響應公式計算的探測器像元灰度值進行對比分析[11-15]。設定黑體溫度點如下:30 ℃、45 ℃、60 ℃、105 ℃、120 ℃、135 ℃;與標定時設定的溫度點不相同,通過公式計算得到響應灰度值。
在1 ms、1.5 ms、2 ms 積分時間條件下,探測器坐標為(320,256)的像元根據標定公式計算的響應灰度值結果和實際測量的響應灰度值如表3~5 所示。
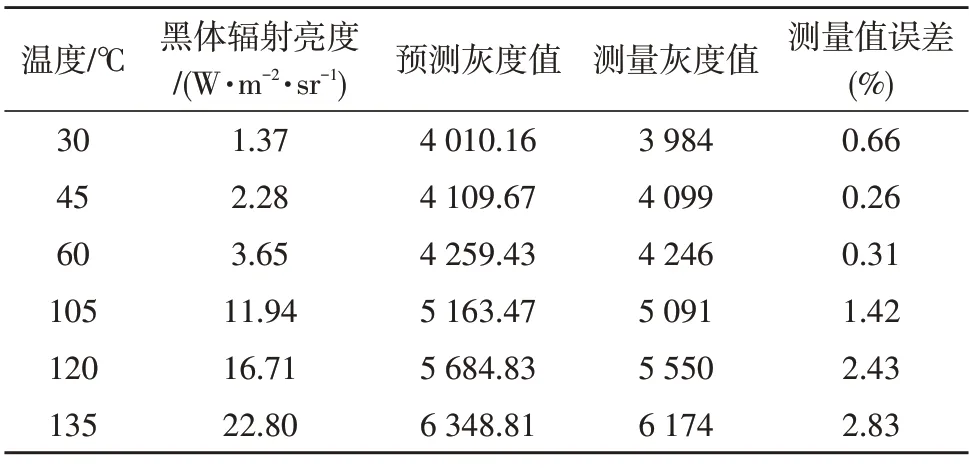
表3 標定精度(1 ms積分時間)
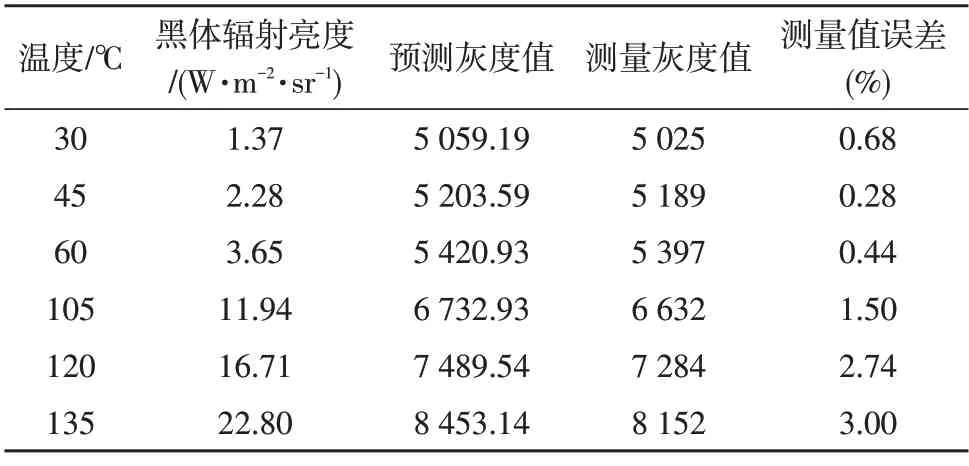
表4 標定精度(1.5 ms積分時間)

表5 標定精度(2 ms積分時間)
可以看出通過標定公式計算值和實際測量值誤差小于3%。誤差隨著黑體輻射亮度增加有增大的趨勢。
目前基于實時標校的目標輻射亮度反演精度一般在20%左右[16-17],因此該文標定精度能夠滿足反演精度對標定精度的要求。
5 結論
利用大型面源黑體對大口徑紅外輻射特性測量系統進行全系統標定,通過實驗數據擬合出探測器不同積分時間下的系統響應方程系數。利用標定方程計算像元輸出灰度值和實際測量值誤差小于3%。因此在實際測量任務前,可以減少溫度標定點,甚至不用每次都進行標定,直接采用之前標定的系數表即可,大大節約了時間。同時總結出探測器不同像元的響應度規律,積分時間較短時,均方根誤差相對于響應灰度平均值偏差小于0.5%,積分時間越小,均方根誤差越小,在長積分時間時,均方根誤差相對響應灰度平均值偏差大于10%,需要進行相應的非均勻性校正。
另外分析了探測器的飽和特性,由于系統中波紅外探測器靈敏度高,很容易到達飽和狀態,因此除了采用控制積分時間還應該采用設置多檔濾光片、變光闌等手段來調節探測器像元的輻照度,但是在采用調光手段時,雜散輻射的影響進一步增加,必須進行大量的標定實驗,總結出相應的規律,為后續開展外場標定及測量實驗奠定了基礎。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
