機器人加工裝備運動學(xué)鏡像模型建立方法與實驗研究
2022-01-19 06:12:32南曉萱席文明
制造技術(shù)與機床 2022年1期
南曉萱 王 俊 肖 明 席文明
(廈門大學(xué)航空航天學(xué)院,福建 廈門 361102)
在自動化制造階段,操作者通過示教器操縱機器人,形成操作者與機器人的直接關(guān)聯(lián),這種模式適合大批量、產(chǎn)品單一的制造過程。在數(shù)字化制造階段,為適應(yīng)多品種、少數(shù)量的訂單式生產(chǎn),構(gòu)建了與物理系統(tǒng)對應(yīng)的數(shù)字系統(tǒng),即物理系統(tǒng)的鏡像模型,實現(xiàn)數(shù)字系統(tǒng)對物理系統(tǒng)功能的部分替代,適應(yīng)快速變化的制造過程[1-2]。在智能制造階段,為替代物理系統(tǒng)的更多功能,在鏡像模型的基礎(chǔ)上,實現(xiàn)數(shù)據(jù)的雙向傳輸,從而建立物理系統(tǒng)與數(shù)字系統(tǒng)的數(shù)字孿生[3-5],通過物理系統(tǒng)的傳感數(shù)據(jù),實現(xiàn)對物理系統(tǒng)的模擬、仿真與參數(shù)優(yōu)化[6]。
建立物理系統(tǒng)的鏡像模型是實現(xiàn)智能制造的基礎(chǔ),然而,由于機器人制造、安裝誤差的存在以及機器人串聯(lián)式結(jié)構(gòu),其物理機器人幾何參數(shù)與數(shù)字空間中的理論參數(shù)并不一致,導(dǎo)致機器人絕對定位精度低。構(gòu)建物理機器人鏡像模型的方法是對機器人的本體和裝備進行標(biāo)定[7],利用標(biāo)定的參數(shù),實現(xiàn)數(shù)字空間中物理機器人的鏡像模型構(gòu)建。標(biāo)定精度決定著建立的鏡像模型精度,從而決定著機器人的作業(yè)精度。
現(xiàn)有標(biāo)定方法沒有考慮零位誤差,即機器人零位時實際關(guān)節(jié)角與理論關(guān)節(jié)角差值對幾何參數(shù)標(biāo)定的影響,導(dǎo)致標(biāo)定后幾何參數(shù)的較大誤差[8],降低了鏡像模型精度和機器人的作業(yè)精度。本文采用軸旋轉(zhuǎn)法標(biāo)定方法,實現(xiàn)幾何參數(shù)與零位的解耦標(biāo)定。利用坐標(biāo)變換法建立標(biāo)定后機器人的運動學(xué)方程,借助牛頓迭代法求取運動學(xué)逆解。
1 軸旋轉(zhuǎn)法標(biāo)定機器人關(guān)節(jié)軸線
圖1是標(biāo)定機器人幾何參數(shù)的實驗系統(tǒng),由安川MH250機器人(日本安川公司,抓取重量250 kg,工作空間2 700 mm)、Radian激光跟蹤儀(美國自動精密工程公司,測量精度為5 μm)以及安裝在機器人末端電主軸連接塊上的靶球組成。標(biāo)定過程為:①驅(qū)動機器人至零位。②在盡可能大的角度范圍內(nèi),按一定的角度間隔只旋轉(zhuǎn)一個軸而其他軸固定,記錄對應(yīng)角度間隔的靶球空間坐標(biāo)。③將靶球安裝到電主軸連接塊的另一個位置,重復(fù)②,即同一個軸測量兩次。④標(biāo)定完一個軸后,重復(fù)①~③過程,直到所有關(guān)節(jié)軸標(biāo)定完成。

對于記錄的同一個軸的兩組數(shù)據(jù),它們處于繞該軸旋轉(zhuǎn)形成的空間圓上,如果能夠利用2組數(shù)據(jù)求得空間圓的圓心,則2個圓心的連線就是該軸的軸線。計算方法如下:

設(shè)測量點的坐標(biāo)為Ki(xi,yi,zi),i=1,2,...,n。空間平面的方程為:
apx+bpy+cpz-1=0
(1)
將n個測量點代入式(1)中,得:
ApXp-Lp=0
(2)

(3)
空間球方程為:
x2+y2+z2-Ax-By-Cz+D=0
(4)
將n個測量點代入公式(4)并以矩陣形式表示:
QqXq-Lq=0
(5)
則其最小二乘解為:
(6)

apx0+bpy0+cpz0-1=0
(7)
又向量O0平行于擬合平面的法向量(ap,bp,cp),則:
(8)
聯(lián)立式(7)、(8),可得擬合平面與擬合球相交的截圓圓心坐標(biāo):
(9)
設(shè)第二次擬合圓的圓心為o′(x01,y01,z01),連接兩圓圓心,得到軸線的向量為:
n=(x01-x0,y01-y0,z01-z0)
(10)
軸線向量n已知,又軸線過擬合圓圓心o(x0,y0,z0),則軸線方程為:
(11)
2 機器人運動學(xué)方程建立
由于制造和安裝誤差,導(dǎo)致物理機器人的軸線由理論的平行或垂直狀態(tài)變?yōu)椴黄叫小⒉淮怪保⑶夷┒巳S不交于一點,無法采用D-H法建立運動學(xué)方程。圖2中,{in}表示理論模型的第i軸連桿坐標(biāo)系,{ia}表示物理機器人第i軸連桿坐標(biāo)系,li表示機器人基坐標(biāo)系中第i軸的方向向量。

{in}繞ki軸旋轉(zhuǎn)λi角使旋轉(zhuǎn)后坐標(biāo)系各坐標(biāo)軸平行于{ia}坐標(biāo)系各坐標(biāo)軸,得到新坐標(biāo)系{i1n};然后將新坐標(biāo)系{i1n}沿向量npi進行平移與坐標(biāo)系{ia}重合,其中:
(12)

由各軸軸線的空間位姿,可以得到物理機器人的零位,見表1所示。

表1 機器人理論零位和實際零位值 (°)

假設(shè)理論模型各連桿坐標(biāo)系相對于機器人基坐標(biāo)系的位姿矩陣為Ii,則物理機器人各連桿坐標(biāo)系相對于基坐標(biāo)系的位姿矩陣Qi可通過式(13)進行求解:
Qi=IiTrans(npix,npiy,npiz)Rot(ki,λi)
(13)
式中:npix、npiy、npix是向量npi在坐標(biāo)系{in}的3個坐標(biāo)軸上的投影。


(3)繞{(i-1)2a}的z軸旋轉(zhuǎn)θi,使得{(i-1)2a}的姿態(tài)與{ia}完全一致,得{(i-1)3a}。
(4)沿向量Si(Six,Siy,Siz)平移,使得{(i-1)3a}最終與{ia}完全重合。
可得:
(14)
αi=arccos[(a(i-1)xaix+a(i-1)yaiy+a(i-1)zaiz)cosβi-1+
(n(i-1)xaix+n(i-1)yaiy+n(i-1)zaiz)sinβi-1]
(15)
(16)
求得的Qi數(shù)值代入式(14)~(16),即可求得物理機器人的連桿參數(shù),見表2所示。
表2 物理機器人連桿參數(shù)
物理機器人相鄰變換矩陣為:
(17)
其中:s表示sin,c表示cos。
根據(jù)正運動學(xué)方程的定義,得:
LS=MA
(18)
其中:L為投影矩陣,MA為給定機器人的末端位姿。矩陣取等式兩邊矩陣的前3行元素對應(yīng)相等,構(gòu)造方程組如下:
(19)
其中:f1(θ)~f12(θ)均是關(guān)于變量θ(θ1θ2θ3θ4θ5θ6)的多元函數(shù),記為F=[f1(θ),f2(θ),…,f11(θ),f12(θ)]T。物理機器人逆運動學(xué)求解的本質(zhì)是求方程組F關(guān)于變量θ的解,使用牛頓迭代法求解該方程組,具體步驟如下:
(1)首先求解方程組F的雅可比矩陣J(θ),并構(gòu)造θ求解的迭代公式。方程f1(θ)~f12(θ)分別對變量θ(θ1θ2θ3θ4θ5θ6)求偏導(dǎo)數(shù),得到方程組F的雅可比矩陣J(θ),如式(21)所示。
(20)
計算雅可比矩陣J(θ)的廣義逆矩陣,并由此得到θ求解的迭代公式,如式(21)所示。
θk+1=θk-[JT(θk)J(θk)]-1JT(θk)F(θk)
(21)
(2)利用機器人理論模型的逆運動學(xué)解,作為牛頓迭代的初值θ0。
(3)根據(jù)迭代公式(21)更新變量θ的值。
(4)根據(jù)加工要求給定迭代精度ξ,本文取小數(shù)點后4位。計算關(guān)節(jié)變化量dθ=θk+1-θk,判斷‖dθ‖∞≤ξ是否成立,若成立,取θ當(dāng)前值作為物理機器人的逆解;若不成立,重復(fù)步驟③~步驟④,直至‖dθ‖∞≤ξ成立或超出迭代次數(shù)。
3 機器人加工裝備鏡像模型建立
物理機器人運動學(xué)標(biāo)定完成后,就可以利用標(biāo)定的參數(shù)建立物理機器人的鏡像模型。圖5a是物理機器人系統(tǒng),圖5b是利用ADAMS軟件建立的與圖5a對應(yīng)的鏡像模型,其方法是按照標(biāo)定的參數(shù)建立各桿件CAD模型并將其導(dǎo)入到軟件中,按照標(biāo)定的幾何參數(shù)裝配成鏡像模型。
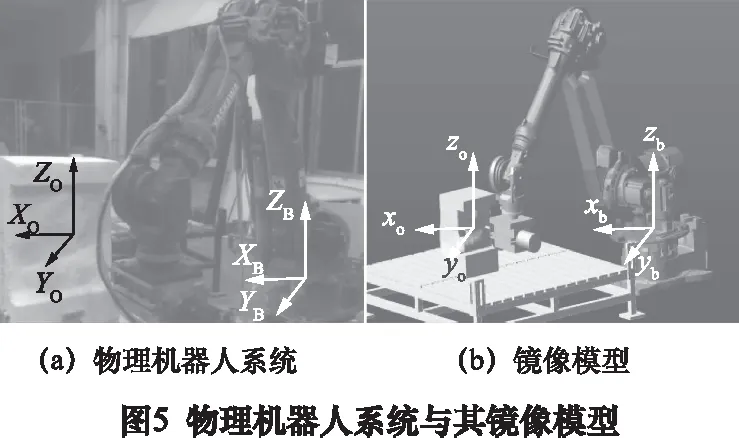
建立物理機器人的鏡像模型后,還需要建立機器人加工裝備的鏡像模型,即圖5a中的其他單元相對于機器人的位姿,與圖5b中的對應(yīng)單元模型相對于機器人模型的位姿一致。以加工對象為例,設(shè)圖5a中加工對象的坐標(biāo)系為{XOYOZO},機器人坐標(biāo)系為{XBYBZB},它們之間的轉(zhuǎn)換矩陣為J1。圖5b中加工對象模型的坐標(biāo)系為{xoyozo},機器人模型坐標(biāo)系為{xbybzb},它們之間的轉(zhuǎn)換矩陣為J2。建立機器人加工裝備鏡像模型的方法為:在物理空間,利用標(biāo)定后的機器人作為測量工具測量J1的值,然后在鏡像模型空間中,利用測量的J1值調(diào)整加工對象模型的位姿,即調(diào)整{xoyozo}的位姿,使得J2=J1。機器人加工裝備中其他單元的鏡像模型建立與此相同。
完成物理機器人本體和裝備的鏡像模型建立后,可以在數(shù)字空間中集成刀軌跡生成與后處理模塊以及加工仿真模塊,實現(xiàn)物理機器人加工前的軌跡生成與優(yōu)化、加工仿真等。
在圖5b中,針對加工對象模型,CAM軟件生成的刀軌跡是相對于{xoyozo}坐標(biāo)系,需要將刀軌跡通過{xoyozo}坐標(biāo)系,轉(zhuǎn)換到機器人坐標(biāo)系{xbybzb}中,生成機器人軌跡,這一過程被稱為刀軌跡后處理。{xoyozo}與{xbybzb}之間的轉(zhuǎn)換矩陣為J2,通過J2易于將刀軌跡轉(zhuǎn)換成機器人軌跡。
4 實驗驗證
圖6是沿長方體四周加工凹槽,通過測量凹槽加工后的錯位誤差以及尺寸精度,驗證物理機器人與裝備鏡像模型建立的有效性。采用理論運動學(xué)模型控制機器人加工的最大誤差為4.02 mm,而采用標(biāo)定幾何參數(shù)的運動學(xué)模型控制機器人加工的最大誤差減少到0.28 mm。通過機器人幾何參數(shù)的標(biāo)定,可以有效提高鏡像模型的精度,從而提高機器人的加工精度。

圖7a是采用變姿態(tài)對半球體進行加工,加工時,其刀具軸線指向球心,圖7b是完成加工后的半球,圖7c是半球加工后的誤差測量方法,即沿不同的d處,測量球冠半徑R。其中球體半徑為50 mm,d值以5 mm為間隔,共測量8次,每次重復(fù)測量10次,取其平均值。半球體加工的誤差范圍為-0.83~+0.52 mm,這其中部分誤差來源于電主軸連接塊的安裝和制造誤差,導(dǎo)致鏡像模型空間與物理空間的工具中心點(TCP)坐標(biāo)系不一致而形成的誤差。
5 結(jié)語
本文利用軸旋轉(zhuǎn)法標(biāo)定方法求取物理機器人的幾何參數(shù),利用求取的幾何參數(shù)構(gòu)建物理機器人的鏡像模型,為物理機器人數(shù)字孿生體的構(gòu)建建立了基礎(chǔ)。后期,將利用機器人廠家提供的開發(fā)庫,獲取物理機器人的狀態(tài)參數(shù)以及加工參數(shù),實現(xiàn)物理系統(tǒng)與數(shù)字系統(tǒng)間的數(shù)據(jù)雙向傳輸,建立物理機器人系統(tǒng)的數(shù)字孿生體,實現(xiàn)加工過程的監(jiān)督與加工參數(shù)的優(yōu)化。

猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
井岡教育(2022年2期)2022-10-14 03:11:44
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
云南教育·中學(xué)教師(2020年9期)2020-11-16 00:27:58
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:00
中學(xué)生數(shù)理化·八年級物理人教版(2017年9期)2017-12-20 08:11:28
中學(xué)生數(shù)理化·中考版(2017年12期)2017-04-18 12:55:05
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03