現代電動汽車旋變傳感器原理及檢測
2022-01-18 12:06:44華奇
汽車實用技術 2021年24期
華奇
現代電動汽車旋變傳感器原理及檢測
華奇
(江蘇信息職業(yè)技術學院,江蘇 無錫 214153)
現代純電動汽車驅動電機普遍采用永磁同步電機,基于定向矢量控制技術,電機位置、轉速傳感器普遍采用磁阻式旋轉變壓器,旋變傳感器信號需要通過R/D轉換器處理,才能給DSP或MCU進行讀取,旋變的信號對電機的控制精度非常重要。因此文章通過分析現代純電動汽車驅動電機的控制方案,針對AD公司的解碼芯片AD2S1205進行研究,該芯片采用Type II跟蹤環(huán)路,環(huán)路連續(xù)跟蹤旋變的位置和速度,而不需要外部轉換和等待狀態(tài),具有系統(tǒng)故障檢測,可以檢測旋變信號的丟失,輸入信號超范圍或位置信號跟蹤丟失。對采用該控制方案的現代純電動汽車報旋變傳感器故障,以吉利帝豪EV450純電動汽車為例,對旋變系統(tǒng)的故障現象、故障產生機理、故障檢測提供了完整的檢修方案。
旋變傳感器;R/D轉換器;驅動電機;檢修
引言
國內主流的純電動汽車電機控制系統(tǒng)都是采用基于DSP芯片的控制系統(tǒng),DSP芯片大都采用TI公司的TMS320系列,比亞迪E5純電動汽車電機控制系統(tǒng)采用了基于TMS320 F28335芯片,基本控制原理見圖1。DSP的高速計算能力,可以完成復雜的信號處理和控制算法,提高采樣頻率,控制電力電子外圍設備[1],在此基礎上可實現電機的高性能控制。電機控制專用DSP豐富的外圍功能模塊,為電機控制帶來了許多的便利。如PWM模塊,可產生高分辨率的PWM波形,并多達6路輸出。針對永磁同步電機的矢量控制技術,電機位置傳感器提供的電機轉子的位置信息至關重要,直接影響了電機是否正常工作。旋轉變壓器作為電機位置信息傳感器,可以適應車輛在惡劣環(huán)境下工作的穩(wěn)定性和可靠性。
1 磁阻式旋變傳感器的結構與工作原理
旋變傳感器本質上是一個變壓器,由定子和轉子構成。在定子上裝有勵磁繞組和正弦、余弦繞組,在空間布局上,正弦和余弦繞組互差90度,轉子和電機軸安裝在一起,和電機軸同步轉動,轉子磁極形狀做特殊設計,使得氣隙磁場近似與正弦形。當轉子轉動時,會導致氣隙中的磁導率發(fā)生變化,這個變化是周期性的,與轉子的極對數是一致的。勵磁線圈中輸入恒定頻率的正弦交流電,根據互感定律,在正弦和余弦線圈中會輸出同頻的正弦波,如圖2所示。
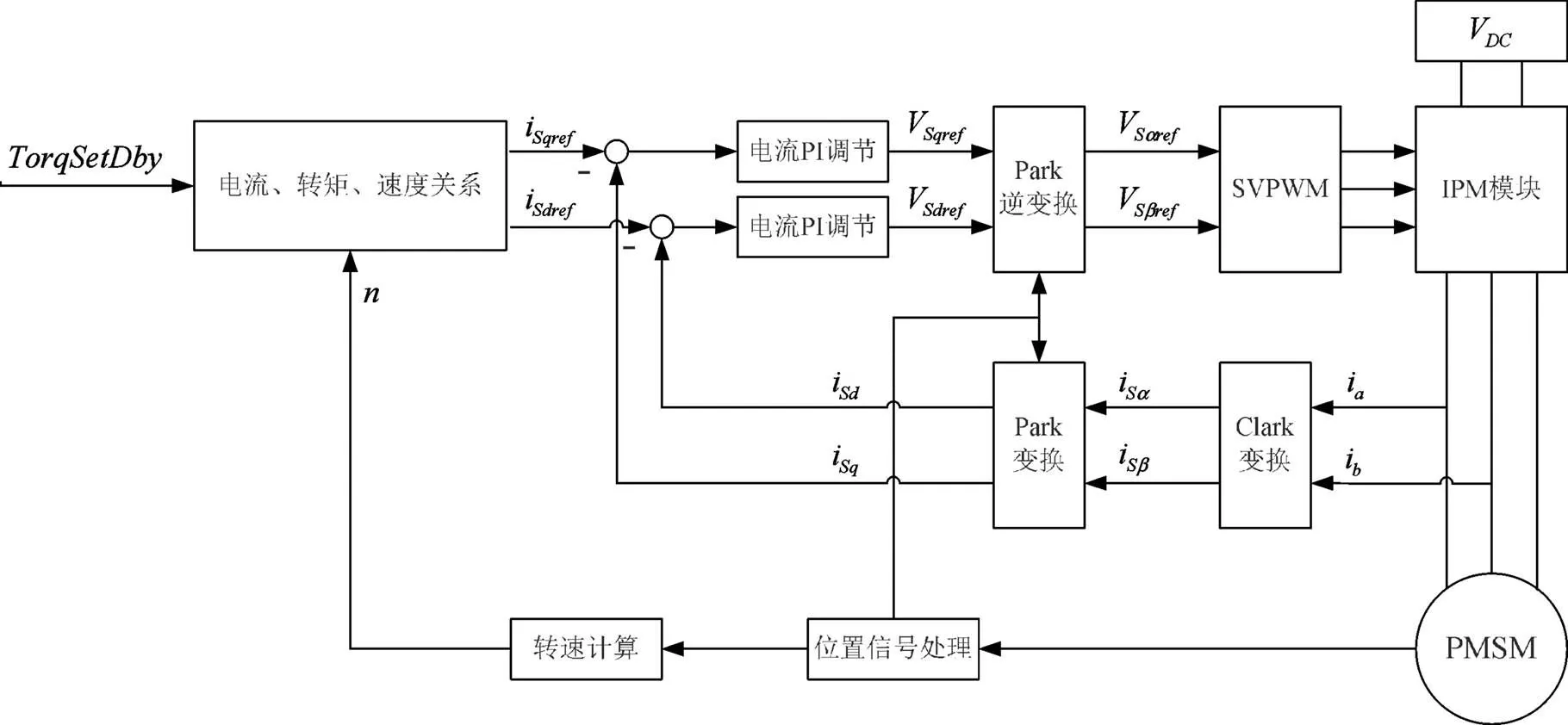
圖1 DSP實現的PMSM控制系統(tǒng)結構圖
勵磁輸入電壓公式:
=sin() (1)
正弦輸出電壓公式:
=sin()sin(2)
余弦輸出電壓公式:
=sin()cos(3)
其中,為旋變轉子角度;為勵磁載波頻率;為勵磁輸入峰值電壓;為旋變的變壓比。
一般車用勵磁線圈的信號頻率在10 kHz左右,正弦和余弦和勵磁信號同頻,和轉子的轉速無關。轉子的轉速會導致正弦和余弦信號的幅值大小發(fā)生變化,正比于幅值大小變化的快慢。由于余弦線圈在空間上和正弦差了90度,兩個信號的幅值大小相反,正弦幅值為零時,余弦幅值最大;余弦幅值為零時,正弦幅值最大,見圖2線圈S和線圈C的波形。
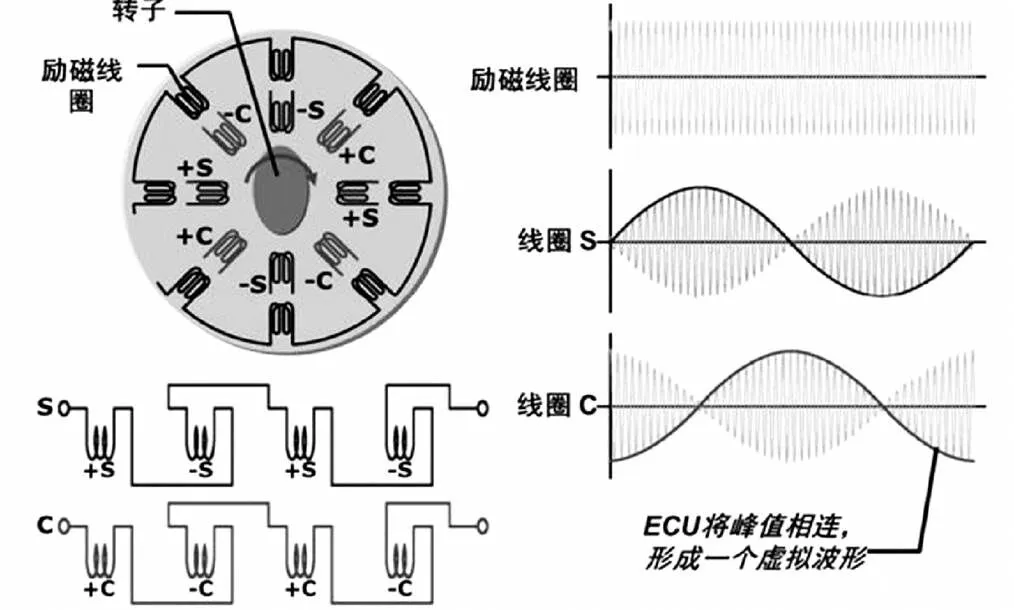
圖2 旋變傳感器構造與輸出波形
在吉利EV450上實車檢測的波形如圖3所示。采用雙通道示波器顯示,綠色A通道是正弦繞組輸出信號,黃色B通道是余弦繞組輸出信號,信號頻率10 kHz,最大值2.32 V,峰值相連的波形在相位上差了90度。
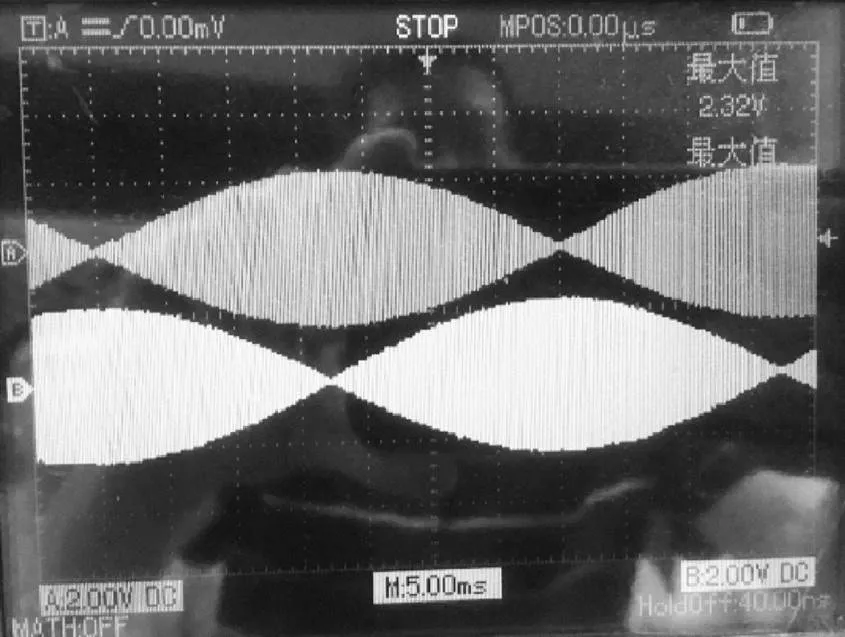
圖3 吉利EV450磁阻式旋變正弦、余弦輸出信號
2 旋變RDC轉換器工作機理
2.1 旋變硬件解碼轉換器
現代電動汽車常用旋變-數字轉換芯片RDC與旋轉變壓器傳感器直接相連,主要圍繞AD公司的解碼芯片AD2S1200系列展開,以常用的AD2S1205為例,該芯片是一款完整的12位分辨率跟蹤分解器數字轉換器,內置可編程正弦波振蕩器,為旋變提供正弦波激勵,工作頻率范圍為8.192 MHz ±25%,該芯片采用Type II跟蹤環(huán)路,可用于跟蹤輸入信號,最大跟蹤速率為1 250 rps[2]。具有系統(tǒng)故障檢測,可以檢測旋變信號的丟失,輸入信號超范圍或位置信號跟蹤丟失。正弦和余弦輸人端支持3.15 Vp-p±27%的差分輸入電壓,可編程激勵頻率,利用頻率選擇引腳(FS1和FS2腳),可以輕松地將激勵頻率設置為10 kHz、12 kHz、15 kHz或20 kHz[3],引腳功能管腳圖如圖4所示。
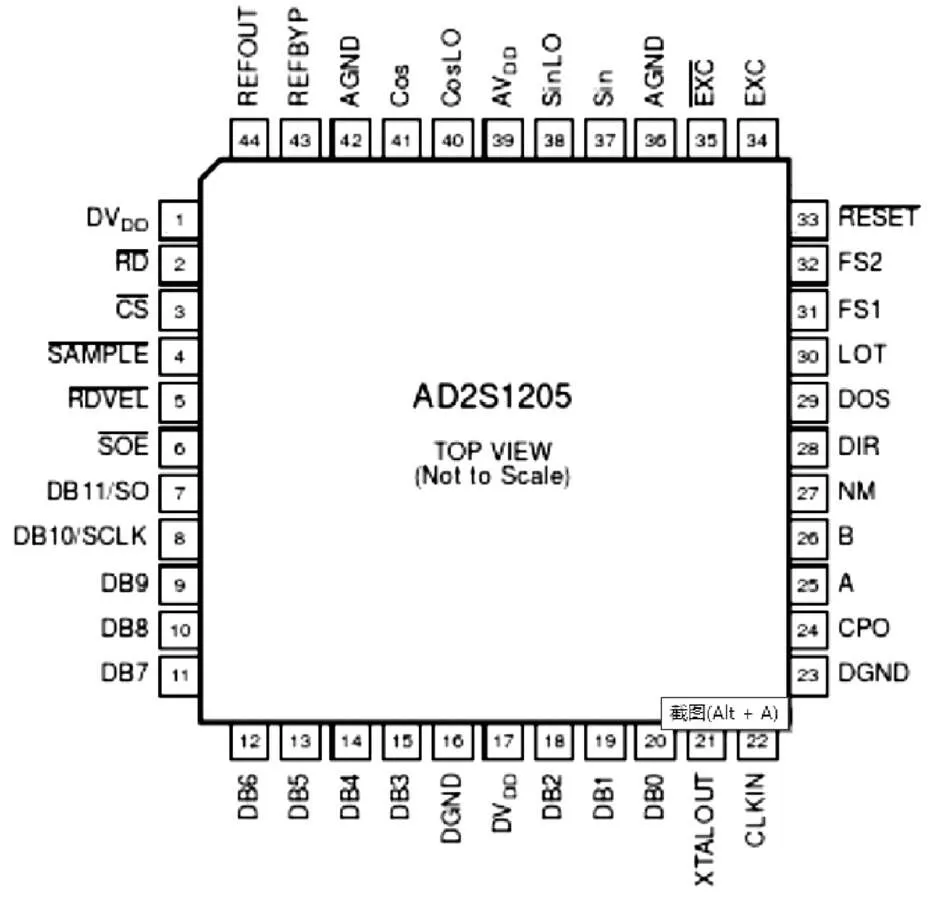
圖4 AD2S1205引腳圖
2.2 AD2S1205轉換器工作原理
AD2S1205采用Type II跟蹤閉環(huán)原理工作。環(huán)路連續(xù)跟蹤旋變的位置和速度,而不需要外部轉換和等待狀態(tài)。當旋變的位置旋轉了相當于最低有效位的角度時,跟蹤閉環(huán)輸出更新1 LSB。轉換器產生的輸出角()反饋并與輸入角()進行比較,借此來跟蹤軸角(),兩個角度之間的差異即誤差,如果轉換器正確跟蹤輸入角則該值趨于0[4]。為了測量誤差,將S3?S1乘以cos,并將S2?S4與sin相乘。
in()×sincos(對于S3?S1) (4)
in()×cossin(對于S2?S4) (5)
二者的差值為:
in()×(sincos?cossin) (6)
利用內部產生的合成基準信號來解調該信號,得到下式:
(sincos?cossin) (7)
公式(4)等效于sin(?);當?的值(角誤差)較小時,sin(?)約等于(?),其中?為角度誤差,(?)是轉子的角誤差與轉換器的數字角輸出之間的差值[5]。
一個閉環(huán)系統(tǒng)由一個相位敏感的解調器、一些積分器和一個補償濾波器形成,它可以將誤差信號歸零。當該目標得以實現時,在轉換器的額定精度范圍內,等于旋轉角。之所以使用Type II跟蹤環(huán)路,是因為它能跟蹤恒定速度輸入,而不存在固有誤差。
AD2S1205將位置寄存器中的角度與來自旋變器的正余弦輸入信號進行比較,產生一個監(jiān)控信號。該監(jiān)控信號的產生方式與“工作原理”部分所述的誤差信號相似。輸入的sin信號和cos信號分別與正弦輸出角和余弦輸出角相乘,再將乘積相加:
監(jiān)控信號=(1×sin×sin)+ (2×cos×cos) (8)
其中:
1為正弦輸入信號的幅度(1×sin)。
2為余弦輸入信號的幅度(2×cos)。
表示旋變角度。表示存儲在位置寄存器中的角度。公式(8)顯示的是解調之后的情形,且載波信號sin()已被移除。此外,對于匹配的輸入信號(即沒有發(fā)生故障時),1=2。當1=2且轉換器正確跟蹤(因此,=)時,輸出的監(jiān)視信號的幅度為1(監(jiān)控信號=(1×(sin2+cos2)=1)。當1≠2時,監(jiān)控信號的幅度以兩倍的軸旋轉速率在1與2之間變化。監(jiān)視信號用于檢測輸入信號是否降級或丟失。故障檢測電路引腳說明見表1:
表1 故障檢測電路引腳說明表
引腳編號引腳名稱說明 29DOS信號降級。邏輯輸出。當旋變輸入超過規(guī)定的 DOS 正弦、余弦閾值時,或者當正弦輸入電壓與余弦輸入電壓之間出現幅度失配時,就會檢測到信號降級。DOS 由 DOS 引腳為邏輯低電平來表示。 30LOT跟蹤丟失。邏輯輸出。LOT 由 LOT 引腳為邏輯低電平來表示
3 純電動汽車旋變傳感器的檢修方法
現代純電動汽車旋變傳感器安裝在驅動電機內部,旋變轉子和驅動電機轉子同軸,旋變硬件解碼RDC轉換器集成在電機控制器內部,并和電機控制專用DSP芯片數據通訊。以吉利EV450純電動汽車為例:
3.1 故障現象
一輛2019款吉利帝豪EV450啟動,上電指示READY燈不亮,車輛上不了高壓電,動力系統(tǒng)故障警告燈點亮,車輛無法掛擋。連接道通908解碼儀,對動力系統(tǒng)進行檢測,讀取故障碼如圖5所示。

圖5 吉利帝豪EV450旋變故障碼
3.2 故障檢測
旋變傳感器的故障檢測可以分為靜態(tài)檢測與動態(tài)檢測。靜態(tài)檢測測量旋變內部勵磁、正弦、余弦繞組的阻值是否符合廠家的標準值,三個繞組到電機控制器的線路連接是否正常。動態(tài)檢測主要測量車輛旋變三個繞組輸出的正弦波形是否正常,波形是否發(fā)生畸變,輻值變化是否在正常的范圍內,頻率是否符合標準。以吉利帝豪EV450為例,旋變傳感器正常數據見下表。
表2 吉利帝豪EV450旋變傳感器正常數據
車型2019款吉利帝豪EV450VIN碼略 靜態(tài)測量測量位置及參數標準值測量值結論 正弦繞組14.5±1.5 Ω14.2 Ω正常 余弦繞組13.5±1.5 Ω13.3 Ω正常 勵磁繞組9.5±1.5 Ω8.9 Ω正常 動態(tài)測量測量位置及參數標準值測量值結論 EP11-15,22腳勵磁波形正弦波,頻率10 kHz,幅值10 V正弦波,無明顯畸變,頻率10 kHz,幅值10 V正常 EP11-17,24腳正弦波形正弦波,頻率10 kHz,幅值0~2.5 V變化正弦波,頻率10kHz,幅值?2.5 V~+2.5 V之間變化正常 EP11-16,23腳余弦波形正弦波,頻率10 kHz,幅值0~2.5 V變化正弦波,頻率10KHz,幅值?2.5 V~+2.5 V之間變化正常 測量位置波形測試結論 電機控制器端口EP11,使用三通道示波器,分別檢測勵磁、正弦、余弦波形下圖中三條線,上方:勵磁線圈;中間:正弦線圈;下方:余弦線圈正弦波形無畸變,頻率、輻值正常正常
旋變傳感器的6根信號線,任意一根出現斷路或對地短路,或者出現互短,都會產生如圖5所示的對應故障碼。依據上表,完成靜態(tài)測量和動態(tài)測量后,故障現象和故障碼沒有消除,可以確定電機控制器內部電路出現故障,需更換電機控制器總成。
3.3 故障排除與總結
找到故障點恢復后,需進行復檢。車輛恢復,打開點火開關,車輛正常上電,可掛擋行駛,故障排除。連接診斷儀,再次讀取故障碼,清除歷史故障碼。最后要根據前面所講的理論,總結故障原因,故障機理,診斷與排故流程,完成記錄。
[1] 杜書杰.基于Popov超穩(wěn)定性的礦用局部通風機矢量控制系統(tǒng) 的研究[D].西安:西安科技大學,2009.
[2] 曹艷玲.旋變位置解碼系統(tǒng)的設計[J].電子世界,2013(19):132- 133.
[3] 王辰欣,洪俊杰,林萬芳.AD2S1205在永磁同步電機驅動系統(tǒng)中的應用[J].電腦與電信,2012(09):26-28.
[4] 王玉玨,翁浩宇,張海勇,等.基于AD2S1210的電機解碼系統(tǒng)設計[J].電子技術應用,2013,39(02):48-51.
[5] 吳成加,趙圣寶.旋變解碼芯片AD2S1205應用系統(tǒng)設計[J].電子技術與軟件工程,2014(20):258-261.
Principle and Detection of Resolver for Modern Electric Vehicle
HUA Qi
( Jiangsu Vocational College of Information Technology, Jiangsu Wuxi 214153 )
Modern all-electric drive motor widely used permanent magnet synchronous motor, based on the directional vector control technology, the motor position and speed sensor widely used magnetic resistance type rotating transformer, spin variable sensor signals need to deal with, through the R/D converter to DSP and MCU read, spin variable signal for motor control precision is very important. Therefore, by analyzing the control scheme of the drive motor of modern pure electric vehicle, this paper aims at the decoding chip AD2S1205 of AD company. The chip adopts Type II tracking loop, which continuously tracks the position and speed of rotation without external conversion and waiting state. It has system fault detection and can detect the loss of rotation signal. Input signal is out of range or position signal tracking is lost. Taking Geely Emgrand EV450 pure electric vehicle as an example, a complete overhaul scheme is provided for the fault phenomenon, fault generation mechanism and fault detection of the rotating system.
Resolver; R/D converter; Drive motor; Overhaul
U467; U463.6
A
1671-7988(2021)24-10-05
U467;U463.6
A
1671-7988(2021)24-10-05
10.16638/j.cnki.1671-7988.2021.024.003
華奇(1976—),男,高校講師,就職于江蘇信息職業(yè)技術學院,主要研究方向為新能源汽車技術。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
