人工智能的情境覺知:一種“在線”適應性表征
2022-01-15 00:48:07魏屹東
上海師范大學學報(哲學社會科學版) 2022年1期
關鍵詞:人工智能
魏屹東
摘? ?要: 如何使機器人這種人工認知系統獲得人類水平的智能,是目前人工智能發展的主要目標。要實現這個目標,人類智能的運作機制和模式無疑是人工智能模擬的最好模型。情境覺知理論的提出和發展,為實現這個目標提供了一種合理的框架和方法論。這就是關于情境覺知的通用模型、注意機制、情境覺知目標與心理模型的匹配要闡明的問題。“事件-控制-行動-適應性”模型是情境覺知理論的進一步發展,更突出了適應性表征特征。基于情境覺知理論開發的各種應用軟件不僅是技術手段,更是方法論,體現在人工認知系統設計的方方面面。
關鍵詞: 人工智能;人工認知系統;情境覺知;適應性表征
中圖分類號:TP18? 文獻標識碼:A? 文章編號:1004-8634(2022)01-0109-(13)
DOI:10.13852/J.CNKI.JSHNU.2022.01.011
一個行為體,如機器人,若能夠在即時境遇中適應性地行動,我們就應該承認它是有智能的。人工系統的適應性行為是通過人為地為機器設置情境或語境來實現的。之所以給機器設置語境,目的在于讓機器能夠像人類那樣在語境中行動,從而實現適應性表征,進而產生意義和理解。這就是為什么純粹的行為和信息是無意義的,它們只有在語境中才具有意義。因為語境不僅影響意義,它也需要正在思考的心智。也就是說,“我們的心智會為信息賦予語境和意義”。1 艾德雷斯(M. R. Endsley)的情境覺知(Situation Awareness,縮寫SA)(也稱態勢感知)理論描述的就是一種動態系統的在線適應性表征,本質上是一種基于語境的模型,旨在為機器人這種動態認知系統設置一個人-機-環境交互的語境,2 使機器人能夠在特定語境中適應性地表征。這是目前人工智能實現人類水平智能的一種新方法。
一、情境覺知的通用模型
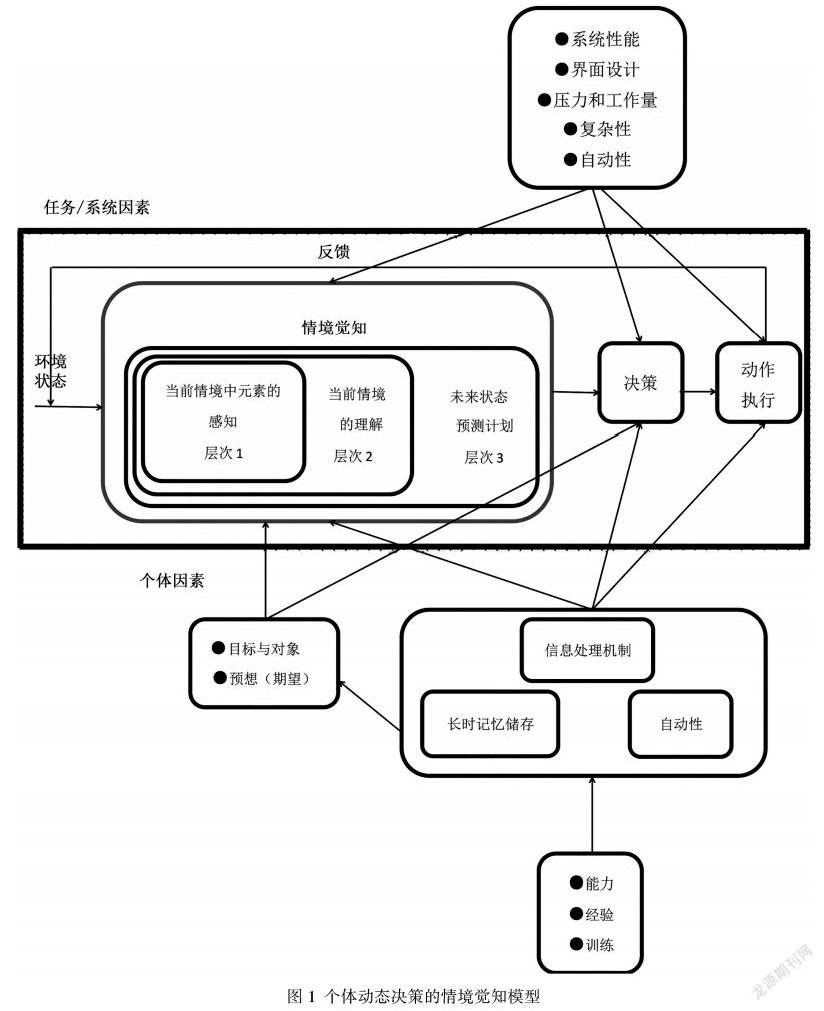
所謂情境覺知是指,“在一段時間和空間內對環境中元素的感知,理解它們的意義,并在不久的將來預測它們的狀態”。1 根據這個定義,艾德雷斯提出一個個體情境覺知的通用模型(見圖1):個人對環境中相關因素的感知,正如由系統顯示的或直接由感官決定的那樣,形成了他或她的情境覺知的基礎,其中動作選擇和性能顯示為單獨的階段,這將直接在情境覺知模塊中進行。
圖1表明,情境覺知模塊有三個層次。層次1是對環境中元素的感知,這是實現情境覺知的第一步,即感知環境中相關元素的狀態、屬性和動態性。比如,飛行員會感知飛機、山脈或警示燈等元素及其相關特性,如顏色、大小、速度、位置等。層次2 是對當前情境的理解,這種理解是基于對離散的層次1元素的綜合做出的。這意味著層次2不僅感知存在的元素,還包括根據相關的操作目標理解這些元素的意義。特別是當它將層次1的元素與其他元素組合起來形成格式塔時,決策者就形成了關于環境的整體圖景,理解了物體和事件的意義。比如,戰斗機飛行員必須理解,三架敵機彼此在一定距離內和在一定地理位置上的出現,預示了它們目標的某些方面。層次3是未來狀態的計劃,這是情境覺知的最高階段,它是通過掌握元素的狀況和動態以及理解當前情境來實現的。例如,如果知道敵機目前是進攻性的,并且在一定的位置,這允許戰斗機飛行員預測敵機可能以特定的方式發起攻擊。因此,情境覺知的基礎遠不僅僅是感知有關環境的信息,還包括以一種綜合的形式理解這些信息的含義,將其與操作者的目標進行比較,并提供對決策有價值的環境來預測未來狀態。在這方面,情境覺知是一個普適框架,適用于共享許多基本認知過程的廣泛應用領域。
可以看出,該模型中的幾個主要因素會影響決策過程。首先,如果給定相同的數據輸入,個體獲取情境覺知的能力各不相同,這被認為是個人的信息處理機制功能受先天能力、經驗和訓練的影響。其次,個人可能擁有某些預想的觀念和目標,這些觀念和目標可在形成情境覺知能力的過程中采取行動過濾和解釋環境。再次,從系統提供所需信息的程度和形式來看,情境覺知也是系統設計的一個功能。所有的系統設計在傳達所需信息的能力或與人類基本信息處理能力兼容的程度上都是不平等的。任務環境的其他特性,包括工作量、壓力和復雜性,也可能影響人的情境覺知。也就是說,在動態的人類決策過程中,情境覺知作為系統操作中的一個主要模塊,是基于決策的一個描述觀(即情境覺知和不同個體、環境因素之間的關系在動態系統中得到描述)。在這些因素中,注意力和工作記憶是作為評價因素限制運算符從環境獲得信息并解釋信息,以便形成情境覺知的能力,而且心理模型和目標導向的行為被假設為克服這些限制的重要機制。
對于團體而言,其中的不同個人的情境覺知組成團隊的情境覺知,而不同團體的情境覺知又可通過交叉或疊加組成更大的情境覺知,這與筆者提出的語境疊加模型是一致的,即不同語境進行交叉或疊加而形成一個特定的語境,1 只有這樣,不同個人或團體之間才能形成一個新的語境,以便進行進一步的溝通和交流。
顯然,決策過程作為動態的情境覺知系統,應該能夠表征人-機-環境間進行的信息輸入、加工、輸出和反饋過程。然而,在實際生活中,人-機-環境組成的具體情境通常是變化莫測的,由于缺乏充足的時間和足夠的信息來形成對這種綜合情境的全面感知和理解,因而對未來情境的準確預測和定量分析就會大打折扣,但不會影響對未來情境的定性分析。艾德雷斯認識到,在操作的意義上,情境覺知模塊的三個層次會產生一些錯誤,比如在層次1,個人可能只是無法在指定的任務中感知某些對情境覺知很重要的信息。在最簡單的情況下,這可能是由于缺乏可檢測性或對所涉信號的物理特性的可鑒別性,或由于系統設計失敗而使信息不能及時提供給操作者,如在航空飛行中機組人員經常缺乏準確可靠的天氣信息。在層次2,情境覺知的錯誤通常是由于無法根據操作者的目標正確地整合或理解感知數據的含義所致。在層次3,情境覺知可能因缺乏合作而導致錯誤的發生。即使一個情境被很好地理解了,如果沒有一個高度發展的心理模型,個人可能很難準確地預測未來的動態。這涉及情境覺知的注意機制問題。
二、情境覺知的注意機制
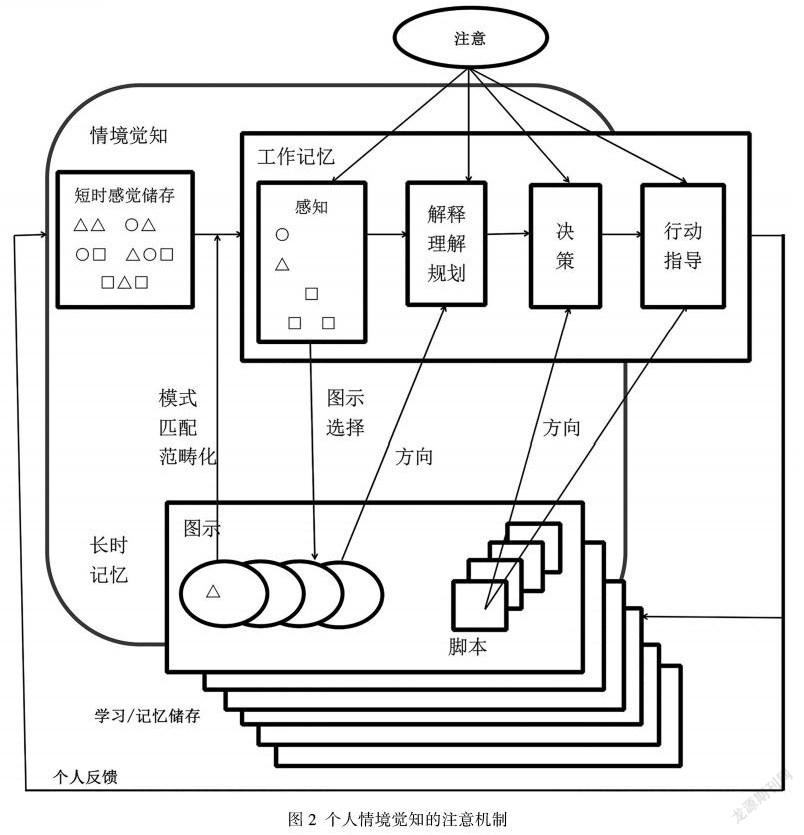
如果上述情境覺知通用模型是可行的,那么人作為動力系統,其心理機制是什么?根據大多數關于信息處理的研究,艾德雷斯認為,環境特征最初是通過預先注意的感覺存儲并行處理的,其中檢測到某些屬性,如空間接近性、顏色、形狀或運動的簡單屬性,為進一步集中注意力提供了線索。那些最突出的對象,基于預先注意的記錄特征,將進一步使用集中的注意力得到處理,以最終實現感知。因此,那些線索的顯著性將對環境的哪些部分最初被處理會產生很大的影響,那些被處理的部分將構成情境覺知的基礎。或者說,短時感覺記憶、知覺、工作記憶和長時記憶的機制構成了情境覺知的基本結構2(見圖2)。
根據認知心理學,在感知過程中部署注意力的作用是對個人同時準確感知多個事項的能力提出了某些限制,因此,注意力是情境覺知的一個主要約束。我們不僅要直接注意感知和處理所關注的線索,還要注意決策和響應執行的后期階段。在復雜和動態的環境中,信息過載、復雜決策和多項任務所產生的注意力需求可迅速超過個人有限的注意能力。然而,復雜系統的操作者經常使用信息采樣過程來規避這一限制。他們按照長時記憶中有關相對優先次序和信息變化頻率的部分所決定的模式來快速處理信息。這一處理過程包括了感知、工作記憶、長時記憶、自動性和目標等因素,如工作記憶在其中起著重要作用,允許人們根據其他感知或目標信息修改注意力的部署,如對奇怪噪音的感知可能會促使戰斗機飛行員查看發動機狀態指示器,當涉及射擊敵機的目標時,注意力可能主要指向該目標,因為對環境要素的有限關注,可提升他們成功完成任務的能力。因此,除了高度突出的線索吸引個人注意力外,人們還積極參與確定環境的哪些要素將成為他們的層次1情境覺知的一部分,方法是根據目標和對象以及基于長時記憶和工作記憶來引導他們的注意力。
圖2清晰地表明,作為心理模型的情境覺知模塊,包括了短時記憶的感覺儲存、長時記憶的圖示和腳本,以及工作記憶這些子模塊,其運行機制是:注意力通過分別介入工作記憶中的感知、解釋(理解、計劃)、決策和行動子模塊來影響情境覺知,而短時感覺儲存→工作記憶→長時記憶和短時感覺儲存形成一個反饋循環。在情境覺知模塊內部,長時記憶中的圖示指向整個工作記憶模塊及其解釋(理解、計劃)子模塊,而工作記憶中的感知又指向圖示,形成一個內部小循環;腳本指向工作記憶中的決策和指導行動子模塊,前者是后者的模板,如菜單。在實踐中,長時記憶結構可用來規避工作記憶的局限性。這是因為長時記憶中知識的精確組織已經得到了多樣化的表征,包括情境記憶、語義網、圖式和心理模型,其中圖式為理解信息提供了連貫的框架,包括高度復雜的系統組件、狀態和功能。
一般來說,一個單一圖示可用來組織幾組信息,因此會有變量可填充正考慮情境的細節。作為一種特殊類型圖示的腳本,為不同類型的任務性能提供了適當的操作序列。圖式和腳本之間的聯系能極大地促進我們的認知過程,因為個人不必在每一個回合都積極地決定適當的行動,而是會根據其相關腳本自動知道在給定情境下要采取的行動,如去飯店聚餐前上網搜索周圍餐館的情況。在筆者看來,艾德雷斯所說的心理圖示就是一種心理模型,一種“人類能夠生成系統目的和形式的描述、系統功能的解釋和觀察到的系統狀態以及對未來狀態的預測的機制”,1 這意味著專家會從表征物到抽象代碼的轉化中發展心理模型。從這個定義來看,心理模型可被描述為用于模擬系統行為的復雜圖式,因此,心理模型可被看作某一系統的模式,如情境模型。
顯然,情境覺知作為一種心理模型,可與描述系統模型的原型情境或狀態記憶中的模式相匹配。這些原型分類可鏈接到能決定決策和行動性能的相關目標或腳本。這為圖1所描述的單步“識別-啟動”決策提供了一種機制。也就是說,這個過程被假定為一個關鍵機制,人們依據這種機制能夠有效地處理大量的環境信息來實現情境覺知。因此,一個完善的心理模型提供了系統的相關要素的知識,這些要素在感知過程中可用于引導注意力和分類信息,如層次1情境覺知;可作為一種整合要素來形成對其意義的理解的手段,如層次2情境覺知;可作為一種基于其當前狀態和對其動態的理解來預測系統未來狀態的機制,如層次3情境覺知。
戰斗機飛行員的例子可說明情境覺知的機制。飛行員可能會感知到幾架被認為是敵機的飛行器,因為那些飛行器在特定的空間排列中接近形成層次1的情境覺知。通過對記憶中原型的模式匹配,這些單獨的信息可被歸類為特定的識別空中飛行器的形成,即層次2的情境覺知。根據一個內部持有的心理模型,飛行員能夠為這種編隊生成可能的攻擊場景,當涉及具有他或她自己飛機的位置和飛行矢量的飛機即層次3的情境覺知時,基于這個高層次的情境覺知,飛行員可選擇規定的戰術(腳本),準確地決定應該采取什么規避策略。總之,感知是情境覺知獲得環境信息的第一步,一旦感知成功,信息就被儲存在工作記憶中,然后通過其內部運行機制處理從環境獲得的信息。
在艾德雷斯看來,使用這些模型來實現情境覺知的關鍵在于個人識別環境中關鍵特征的能力,這種能力將映射到模型中關鍵特征的關鍵線索上。然后,該模型可提供更高水平的情境覺知,如理解和預測,而不用加載工作記憶。在為給定的原型情境開發腳本的情況下,用于生成替代行為并在其中進行選擇的工作記憶的負荷會進一步減少。這種機制的一個主要優點是,當前情境不必完全像以前遇到的情境那樣。這是分類映射的結果,即在情境的特征和已知類別或原型的特征之間的最佳擬合。最重要的是,由于人類模式匹配機制的優越能力,這一過程幾乎是瞬時的。當一個人有一個發展良好的心理模型或特定系統的行為時,該模型將根據模型的投射機制提供對關鍵線索的動態關注方向、對環境未來狀態的期望,以及在公認的情境分類和典型的行動之間的直接單步鏈接。
總之,圖式和心理模型是在給定環境中被開發的訓練和經驗的一種功能。一個領域的新手可能只有重要系統組件和粗略規則或啟發式的一個模糊想法,以確定他或她應該使用的行為與系統,然后根據經驗,反復出現的情境成分以及反復出現的關聯和因果關系將被注意到。這構成了早期圖式或模型開發的基礎。此外,情境覺知的一個重要方面還涉及個人對情境覺知的信心水平,因為人們對他們根據其可靠性獲得信息來源的準確性有一定的信心。除了開發具有經驗的心理模型外,還可以獲得一種自動性的形式,而自動處理往往是快速的、自主的、毫不費力的,并且對有意識覺知來說是不可用的,因為它可在沒有注意力的情況下發生。因此,某些任務的自動性可通過提供一種克服有限注意力的機制顯著地使情境覺知獲益。
三、情境覺知與目標和心理模型的匹配
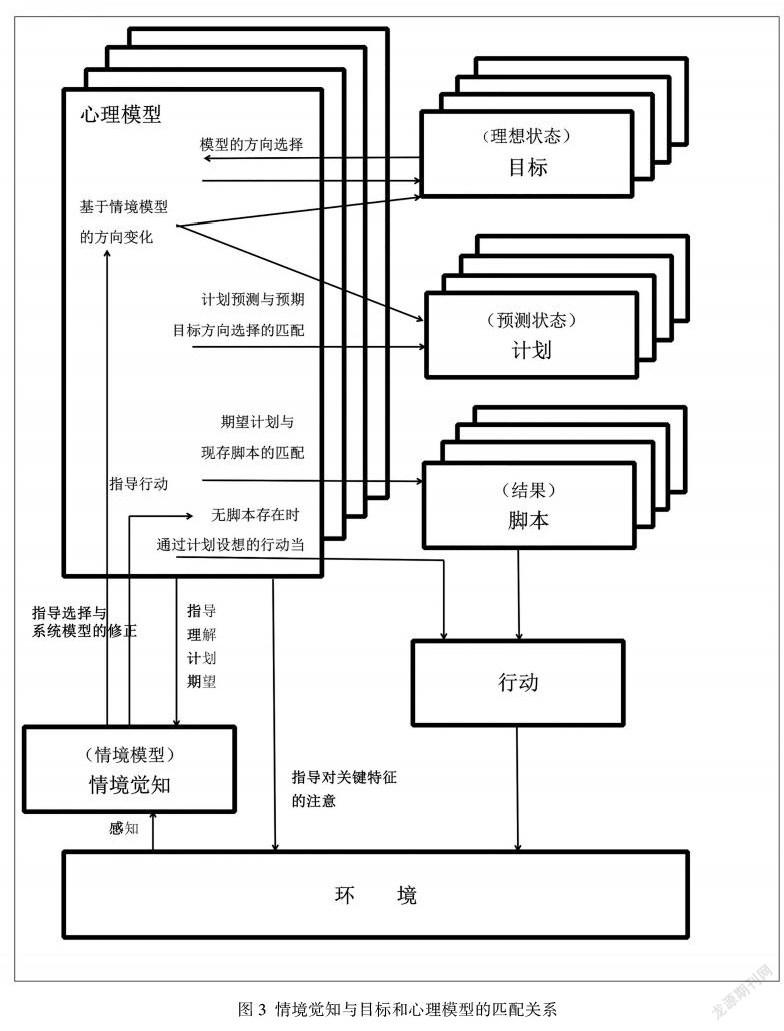
根據通用模型,情境覺知是基于心理模型并且是目標導向的。這樣一來,人們通常不認為情境覺知是一種僅僅為其本身而存在的結構。對于某些系統或任務的決策來說,情境覺知是非常重要的,因為它與正在尋求的語境和決策是緊密聯系在一起的,而且從根本上與個人的目標聯系在一起。我們知道,目標是動態環境中大多數決策的基礎。多個目標可能同時被執行,而且這些目標有時可能發生沖突。在大多數系統中,人們不是來自環境的數據的無助接受者,而是根據其目標主動尋求數據,在艾德雷斯看來,這其中包括自上而下和自下而上兩個決策過程(見圖3)。
圖3表明,從環境出發,人們通過感知經情境覺知的指導選擇和系統模型的修正達到心理模型,心理模型與目標相互作用,并與計劃、腳本發生關聯,再共同指向行動,然后重新作用于環境。同時。心理模型還通過指導、理解、計劃和期望作用于情境覺知,通過對關鍵特征的注意而指向環境。總的來說,目標將情境覺知模塊和心理模型連接起來,使得心理期望與計劃和腳本匹配,最終指導行動,達成目標。
從表征的角度看,這是一個目標引導的適應性表征過程,其中的自上而下和自下而上的過程構成一個反饋循環。根據艾德雷斯的看法,在一個自上而下的決策過程中,個人的目標和計劃直接影響環境的那些被吸引到情境覺知發展的方面。然后,根據這些目標整合來解釋那些信息,并形成層次2的情境覺知。對系統中的每個參數都進行觀察本身并沒有意義。然而,當它們在其所指關于以特定方式操作系統的目標的語境中被整合和評價時,它們變得有意義了。然后,基于這種理解決策者選擇將感知環境與他或她的計劃和目標活動相一致。同時,自上而下的過程連同自下而上的處理將一起發生。此時,環境中的模式可得到確認,這表明新的計劃對于實現積極的目標或不同目標的激活是必要的。這樣,個人的當前目標和計劃可能會改變,以適應環境中的事件變化。自上而下和自下而上處理的這種交替過程允許個人在動態環境中有效地處理事件。顯然,這個過程是適應目標和環境而表征的。
當然,這個過程也與心理模型和圖式所承擔的角色有關。這就是心理表征過程。圖3示意的模型可形象地說明這種關系。系統的心理模型可被看作作為緩慢進化的組合記憶結構存在的。這意味著個人形成了一組與某些系統相關的目標。這些目標可被認為是人們希望實現系統的理想狀態。同一組目標可能經常存在于給定的系統中,也可能經常發生變化。這要依環境的情況而定。事實上,一組目標可能與多個系統模型有關。個人的當前目標會被選為最重要的競爭目標,并采取行動指導選擇一個心理模型。所選目標還將確定所采用的模型的框架和焦點。然后,個人使用模型的投射能力設計一個計劃來達到目標。這其實就是筆者主張的語境投射,說到底,一個模型是基于特定語境而投射到目標上的。
在投射過程中,個人將選擇一個計劃,使其預測狀態與目標狀態最佳地匹配,也就是獲得適應性表征。當腳本可用于執行選定的計劃時,它們將得到使用;而當腳本不可用時,必須設計操作以促使計劃的完成。同樣,系統模型的投射能力將用于實現這個目標。作為一個持續的過程,一個人觀察環境的現狀,他或她的注意力通過目標激活的模型指向環境特征,并根據該模型進行解釋。或者說,模型在表征中是作為中介工具解釋對象的。這種表征工具是積極主動的,提供了對關鍵環境特征的現狀和對未來事件之期望的未來預測。當這些期望與觀察到的期望相匹配時,要實現的表征就完成了。當它們不匹配時,用于某些參數的值是不同的,或者發生了不該發生的事件,或者沒有發生應該發生的事件,這向主體發出了一些錯誤的信號,并指明由于情境類型的變化、模型的修正或新模型的選擇而需要更改目標或計劃。
這個過程也可通過改變目標的相對重要性來改變當前的目標選擇,因為每個目標都可以有控制情境類型的先行規則,其中每個類型都可調用其他類型。當多個目標相互兼容時,幾個目標可能同時處于激活狀態。當目標不兼容時,其所標識的情境類型的相關優先級別確定應該調用哪一個類型。同樣,如果所提供的反饋表明計劃沒有按照其預測取得結果,或者當新的目標需要新的計劃時,計劃可能會被改變或選擇新的計劃。通過學習,這些過程也有助于創建更好的模型,以便在未來進行更好的預測。人工智能的深度學習也是如此。比如,在軍事對抗的情境中,飛行員可能有不同的目標,像保持活著,擊落敵機并轟炸既定的目標等。這些一般目標還可能有更具體的子目標,如導航到目標、避免被探測、避開導彈和使用導彈。飛行員將根據目標的相對重要性和當前情境進行分類,在目標和次目標之間進行選擇。對飛行員來說,活著是一個優先目標。這個例子表明,當前目標將指示模型和框架處于激活狀態。使用導彈目標的模型可能會直接關注關鍵環境特征,如飛行員和敵機的動態相對位置和當前的武器選擇等。若這個模型處于激活狀態,飛行員將傾向于尋找和處理環境的這些關鍵要素。比如,使用由此產生的情境覺知,并結合導彈使用模型,這會使飛行員能夠確定如何最好地使用相對于敵機和導彈發射的時機,即計劃和行動。而在實現這個目標的同時,飛行員還要注意可能指明應該激活新模型的關鍵特性,例如,如果飛行員發現了一個新的威脅,激活的目標可能會改變,以便飛行員停止操作導彈使用模型,并啟動與該目標一致的威脅評估模型。所選擇的模型,如果足夠詳細,將用于指導情境的理解、未來事項和決策。
顯然,情境覺知與其目標和心理模型一定是匹配的,其表征一定是適應性的,否則,情境覺知的目的就難以達成。事實上,情境覺知這個概念本身就蘊含了認知與其所在境遇的一致性和適應性。如果不這樣,情境就沒有必要出現了。
四、情境覺知的適應性表征
綜上表明,情境覺知是一種強大的人工認知范式,可有效地利用移動設備如智能手機日益增長的適應性能力。在計算機科學和人工智能中,一種穩健的、基于一般規則的方法是采用語義網推理、模糊邏輯建模和遺傳算法來分別處理情境推理、不確定輸入處理和對用戶行為的適應性表征,能讓智能機器人能夠像人那樣感知地行動,如可預測用戶的需求。然而,要實現情境覺知,基本手段離不開語境的使用,即使用所有相關數據和信息,如用戶在空間和時間上的位置、周圍的事物和事件等。根據科斯塔等1 提出的“事件-控制-行動”(Event Control Action,縮寫ECA)模式,基本情境模型可用條件規則來表征:
如果(語境條件)那么(情境)(即if-then 推理形式)
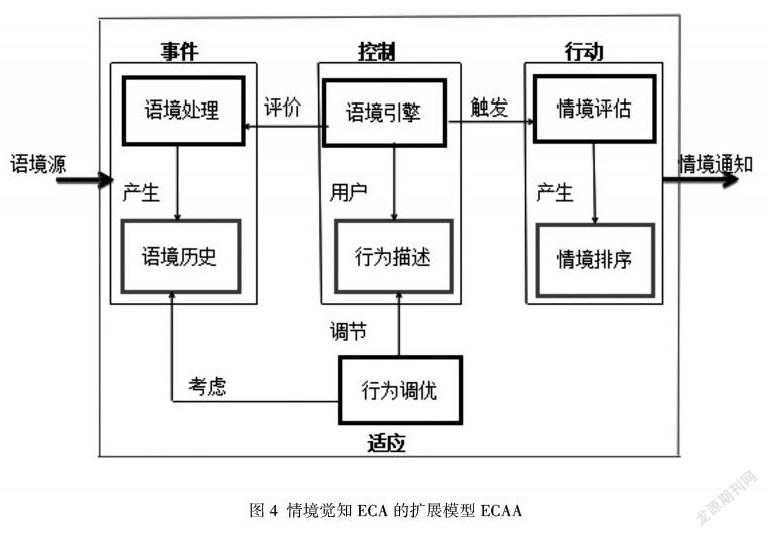
條件部分是由表示基本數據或傳感器樣本的語境變量表征條件的邏輯組合而成的。例如,檢測一個人是否進入實驗室的傳感器,這是一個人隨身攜帶的識別卡。這種組合條件模擬了一些在應用程序領域或其環境中感興趣的事件。出現上述語境條件可能意味著“有人進入實驗室”。奇米諾等2 將適應性引入ECA模式,即將其擴展為“事件-控制-行動-適應性”(Event Control Action Adaptation,縮寫ECAA)模式,旨在解決語境變化時情境的相關信息頻發的問題。這等于將適應性嵌入了ECA模式,因為說到底,一個行動若不適應其環境,那它就失去意義了。在筆者看來,這就是用適應性改造ECA,旨在讓人工認知系統能夠融入變化的環境(“if-then”+ECAA組成的模式見圖4)。
圖4展示了ECAA模式的結構、頂部模塊及其間的關系。不同方框分別表示功能模塊和信息模塊。基本組件是語境處理、推理引擎、情境評估和行為調優模塊。顯然,ECAA模式反映了情境覺知應用程序的主動性以及適應用戶特性的必要說明。語境處理模塊檢測發生在語境源中并對觸發一個或多個規則具有重要意義的事件;推理引擎模塊監視規則條件,并在滿足條件時觸發更新操作;行為模塊提供高級行為描述(條件規則);情境評估模塊實現情境排序、標識和通知的操作。
對于情境覺知控制的通用軟件構架來說,情境覺知伺服的應用程序控制器通過情境推理器模塊訪問用戶所處情境或當前語境,這是一種獨立于域的網絡服務,它根據ECAA模式引導推理的控制流程。具體說,情境推理通過通用界面收集來自語境源的數據;加載知識庫,如領域范疇、規則和語言變量;在評估語境條件后填充情境;更新情境或語境歷史以調整語言變量。而由專門的語境源模塊提供的活動包括:感知,即從傳感器設備收集源信息,如從GPS設備收集位置信息(緯度、經度、速度);聚合或融合,即觀察、收集和組合來自提供者的語境信息,如將來自GPS和射頻識別(RFID)設備的位置信息組合起來,分別用于室外和室內傳感。高層模塊提供的活動包括:推斷,即對語境信息的解釋,以獲得另一種類型的語境信息;聚焦或例示,即對特定實例和特定情境的語境信息的投射,如側重于用戶議程中下一次任務所表征的時間窗口。
接下來更具體地考慮情境推理模塊的組件及其功能。情境觀察器負責觀察語境源組件感知到的語境變化,并根據行為描述觸發產生情境評估的動作。行為描述由范疇、語言變量和從語境規則描述情境的規則組成。規則引擎(推理器)能夠處理知識庫并觸發規則。這里有兩種不同的推理器——語義推理器和模糊推理器,其活動由情境觀察器來協調。情境觀察器在通過語境源感知到語境條件的發生時,它有能力檢查知識庫中是否有這些更改引發的規則,并協調兩個引擎的執行。然后,生成的情境被情境覺知應用程序用于調整其功能,并由語境歷史采樣器記錄。語境歷史通過語言調諧器被用來適應特定用戶與語言變量中使用的語言術語相關的含義。
需要指出的是,圖4只是對情境覺知功能模塊的總體說明,而具體解決情境覺知問題的通用方案還應包含組件、組件的功能、組件的關系以及一些可描述的理想屬性,諸如:為設計原則提供一個共同的詞匯表和理解過程;提供一種指定情境覺知結構的方法;支持具有定義屬性的軟件智能體的構建;構建復雜和異構的情境覺知中間件;協助管理軟件的復雜性。該解決方案將語境管理問題(如語境感知和處理)與語境變化的情境推理脫鉤,即在離線的情境下進行推理和預測。
當然,構建一個領域范疇是一項既困難又昂貴的事情,因為我們很難從問題域中提取相關知識并以適當的方式表達。一般來說,初始原型是基于解釋性文本或與領域專家的訪談而開發的。然后,通過與專家和系統的潛在用戶合作進行測試和修改,可對原型進行改進。比如,語境范疇處于情境推理器的核心,允許將語境信息連接到具體情境。
在語境范疇的設計中,奇米諾等認為設計者一般會面臨兩個主要問題:一是表征系統知識庫中的一般信息和特定信息;二是表征網絡范疇語言中的模糊信息。更具體地說,語境范疇被分為一個對一般概念有效的上層范疇和一組較低層的特定域范疇,它詳細描述低層概念及其屬性的上層范疇。這樣一來,上層范疇對于許多應用場景都是有效的,可被認為是專門針對不同領域的穩定參照系。上層范疇是以自下而上的方式設計的,從基本的領域概念及其關系開始,通過對領域專家的訪談來強化。
一般來說,上層語境范疇包括四個方面:(1)用戶(擁有移動設備和日歷的人),由他們與其他用戶間的空間關系和位置確定,比如接近于、遠離于等。(2)用戶有一個名字,他/她可以靜止或移動,也有一個當前的時間,可處于一個或多個情境下。(3)日歷包含由用戶組織的約會,并計數參與者,有約會,約會位于一個地方,并按間隔安排,其中有開始時間即啟動時間和結束時間。(4)確定時間關系,如在-后,在-前,在-中間等。總之,上層語境范疇通常是以語義網形式表征的,如網絡范疇語言OWL,1 也可用命題邏輯、概率邏輯、模糊邏輯和貝葉斯網表征,或者是它們的組合表征。這些表征方式在人工智能中都是常見的。比如,關于空間中物體接近關系的具體表征,其時間區間相關性質的抽象表征,模糊集相關性質的模糊范疇2 的抽象表征,以及模糊屬性空間接近的具體表征。這涉及情境推理的表征語言問題。
在情境推理中,語境源是一個系統中由專門模塊處理的原始語境數據,這種低層處理由語境源模塊包括定位系統、用戶日歷、地理地圖等表征,最終建立語境數據庫。情境推理是基于語境數據庫的。這說明建立數據庫和知識庫對于情境推理的重要性。情境推理器通過觀測器設計模式封裝的知識處理,協調內部引擎的通信,并允許使用獨立的完全符合標準的機制來控制網絡語義和模糊引擎,如基于OWL。
根據ECAA模式,情境推理過程涉及三個模塊——情境觀測器、語義推理器和模糊推理器。在情境觀測器中,觀測器模塊引導其他模塊的執行流程。觀測器充當模糊推理器和語義推理器之間的橋梁,并通過語境收集模塊獲取語境源,該模塊負責收集與語境相關的在線輸入數據,如用戶的當前位置。這些數據由語境維護器模塊用于處理實際條件的集合。實際條件是表征可能模糊范疇關系實例的對象模型,如事件、控制、行動、適應性的組合。
在實踐中,這種模型已應用于實際業務,如典型商業情境下的藥學顧問。通過對藥學領域專家的一系列訪談,我們可以建立商業案例的知識模型。特別是,上層語境范疇已經擴展到特定域的范疇,能識別更好地描述商業案例的概念和概念之間的關系。此外,還有不同的情境需要確定、需要重新定位語義規則,比如會議計劃、招標會的會前會議、正在舉行的會議、會后會議、醫院會議、招標和用餐等,之后,針對每一種情況,從訪談專家的實際需求出發,確定一套可能的任務和相關資源。因此,上述任務范疇已經用特定域概念和關系進行了擴展。
概言之,識別用戶參與的情境會導致在某一時間更好地識別用戶的需求。在ECAA模式中,情境是由語境條件的邏輯連接導出的。領域知識是通過范疇和語義規則來表達的,以保證可移植性、可集成性和可擴展性。這樣,軟件智能體就可管理自己的語境源,方便地相互通信。整個系統依賴于形式表征,避免知識庫的不一致問題。語境條件可能受到不確定性的影響,比如由于傳感器測量不準確或人類表達的概念不精確。采用模糊邏輯有效地控制不確定性,可以使語境條件得到更準確的處理。因此,這是一種基于歷史語境、使用模糊邏輯、語義規則和遺傳算法的適應性表征方法,可自動調整規則庫以適應用戶的實際行為,提高情境評估的準確性和響應性。
五、情境覺知的方法論意義
情境覺知理論源于自然認知系統(人腦)進而推廣到人工認知系統的情境。從適應性表征來看,不論是哪種認知系統,只要它能夠適應目標和環境進行適當表征,就是可行的。筆者業已發現并論證,適應性表征是這兩種系統的共同特征,也是表現出智能所必需的。1 在這個意義上,情境覺知的實質就是適應性表征,其方法論意義就體現在情境覺知理論的發展和應用中。
第一,由情境覺知發展出的“情境覺知全局評估技術(SAGAT)”可用于評估基于操作者理解的動態系統的情境覺知行為,如對航空系統的情境覺知的評估。2 這是一種以人為中心的自動化水平評估(human-centered level of automation,縮寫LOA),一種動態控制系統中傳統的、以技術為中心的自動化設計的替代方法。這種人控LOA的目標是通過考慮操作者和技術能力來提高人-機交互性能。目前已經建立了LOA分類法,讓人機有效地結合,包括監測系統變量、生成過程計劃、選擇“最佳”計劃和實施計劃。其中操作者的情境覺知是使用SAGAT測量的,比如在民航系統中,情境覺知被普遍認為是民航環境成功的關鍵。3 在情境覺知的測量上,4 比較不同情境覺知可用于空中交通管制有關的情形,包括模擬和在操作環境中的研究。一項關于航空高速公路(Highway-In-the-Sky,縮寫HITS)空中展示對飛行員情境覺知的影響研究表明,5 HITS顯示儀提供課程指導的飛行員使用通過空中路徑的透視視圖,這是通過全球定位系統(GPS)實現的,而且強大的圖形顯示系統能夠提供實時的HITS描述的駕駛艙。一個基于SAGAT測量情境覺知的模擬訓練演習初始計算模型,模擬了軍事人員恢復中心的實際生活事件,解決了共享情境覺知建模團隊如何協同工作的問題。6 這個初始模型探討了五個因素(社交網絡距離、物理距離、等級相似性、分支相似性和經驗相似性)來共享情境覺知的預測效果。這些實驗表明,SAGAT具有良好的情境覺知敏感性。
第二,情境覺知是在動態和共享環境中進行的操作者之間的互動。比如關于運輸活動中的意圖識別和情境覺知涉及駕駛汽車或飛機的情境覺知,1 這些交互可能會修改語境。對這種動態情境的認識意味著既要確定其他人目前的行動,又要預測他們的意圖。研究表明,在活動期間建構過程支持操作者的情境覺知,并為未來實施的信息系統提出了新的要求。建構情境覺知的過程必然涉及操作者的心理工作負荷,2而心理工作負荷和情境覺知都是評估操作者執行和控制動態復雜任務的實際需要的結果。心理工作負荷是指通過執行所需的與任務相關的心理加工而對人類操作者的認知加工能力所付出的代價,情境覺知則是操作者對當前形勢的理解,比如,設計一個新目標或修改一個現有目標通常是減少操作者的心理工作負荷同時又增加操作者的情境覺知。
第三,情境覺知為普適計算和環境智能建造了以智能方式與環境特別是用戶交互的系統。一種基于感知和語境推理的情境覺知的綜合方法表明,3 為了解和反映當前情境,用戶通常必須理解和處理描述環境狀態特定方面的一組復雜特征。迄今還沒有標準的機制來模擬和推理復雜的境遇。綜合方法描述了一種全面的情境覺知,涵蓋了語境捕獲、語境抽象和決策的整個過程。這種解決方案包括基于范疇的感知和推理環境描述、感知設備和推理組件的控制,以及將這些組件整合到決策應用中,將這些技術組件嵌入到概念架構和通用框架中,就能夠輕松和靈活地開發情境覺知系統,基于會議室場景方法是其典型例子,2020年新冠病毒期間流行的視頻會議和視頻課程就是基于情境覺知理論開發的。
第四,情境覺知讓智能體能夠在高度動態的環境中確定感知信息的意義,并分享由此發現的知識。情境覺知的上層范疇研究表明,4 基于范疇的情境覺知方法促進了上層范疇,為協作智能體和信息源提供了一個共同的詞匯表或知識庫,提出了一個評估框架來闡述其缺失的特征,并發展出更好理解所涉及的不同概念的方法。在筆者看來,設置上層范疇等于是設置了相關語境,比如語境范疇(context ontology)就是在普適計算環境中使用網絡范疇語言建模語境的一種方法,5 其核心概念語境范疇是語境實體及其子類,包括實體、位置、人和活動。在評估框架中,語境范疇并不模型化屬性、事件和情境特別是整個語境,人和計算實體可粗略地映射到對象。由于情境不是明顯地被模型化的,也就沒有情境類型和情境不作為對象被處理的情形。
第五,情境覺知作為一種范疇驅動方法,可解決信息過載問題。信息過載是大規模控制系統的人類操作者面臨的一個嚴重問題,如道路交通管理領域遇到的問題。這類系統的操作者有可能缺乏情境感知,因為現有系統只注重在圖形用戶界面上提供現有信息,從而沒有及時和正確地識別、解決和預防危急情況,如道路擁堵。鑒于基于范疇情境覺知方法是以語義豐富的知識模型出現的,要么是高度域-特異的,要么是域-獨立的,可重復使用方面存在缺陷。一種基于范疇驅動的信息系統——“Beaware!”可提高操作者的情境感知能力。6 與現有的域-獨立方法相比,“Beaware!”的范疇引入了觀察到的真實世界對象之間時空原始關系的概念,從而提高了框架的可重用性。然而,范疇驅動情境的預測是需要優化的,以支持大規模控制系統中的情境覺知系統,這就是使用范疇和規則來優化預測。1 道路交通管理領域的案例揭示,許多現實世界的情境演變的搜索空間可大大減少,證明這種方法是有效的。例如,運用任務和人為誤差分析對交叉口關鍵駕駛情況進行情境覺知評估,2 傳感器和跟蹤技術的快速發展,使得部署先進的駕駛員輔助系統成為現實,從而大大減少了因信息過載而發生交通事故的概率。此外,“Beaware!”也適用于情境驅動的情境覺知玩令牌游戲的情境預測網。3 為了提高預測的整體質量,同時保持建模的可行性,一種基于彩色Petri網的域-獨立方法補充了范疇驅動的情境感知框架“Beaware!”。這些情境預測網可自動生成,并允許通過利用范疇知識在對象特征和關系之間的相互依賴方面提高預測精度。
第六,情境覺知將模糊邏輯和語義網相結合,通過消除不確定性來實現情境感知。在互聯網服務推薦中,移動互聯網的迅速增長讓我們有大量的資源可用。到目前為止,用于定位資源的通用機制,如瀏覽和搜索,在幫助用戶移動方面不再有效。事實上,用戶的個人信息空間非常大,而移動設備的交互能力有限,比如,一個情境覺知框架以積極主動的方式提供個性化資源,4 它通過利用以范疇和語義規則表征的領域知識來推斷用戶的當前情況,這些知識分別用網絡范疇語言(OWL)和語義網規則語言(Semantic Web Rule Language,縮寫SWRL)表征。在某些語境規則條件下,不確定性是通過模糊控制語言(Fuzzy Control Language,縮寫FCL)定義適當的語言變量來處理的,模糊系統的標準表征用于不同實現之間的數據交換,并采用有目的的范疇和規則的自適應編碼。不確定條件會帶來不同確定性程度的多個情況:這些程度被用來為同時發生的情境分配等級,最終情境被連接到一組相關資源并被推薦給用戶。
第七,情境覺知可用于自主系統的情境覺知的評估。自主系統在專門問題領域是非常成功的,但它們的感知、推理、規劃和行為能力通常是出于適應特殊的目的而設計的。例如,機器人智能體以一種由人類設計者預先定義的方式(為其設置語境)感知其環境。智能體并沒有表現出一定的感知行為,因為它們實際上以為這樣做是合理的。隨著自主性水平的提高,以及智能體操作的時空范圍的擴大,更高層次的情境分析和評估變得至關重要,如評價自主系統情境覺知的標準——感知、理解和預測能滿足動力學方法,5 可應用于評估具體場景,如機器人排除障礙的評估。特別是對于不確定性,情境分析和評估給出了無知推理的動力學信息模型,包括無知推理、智能體感知模型、信息相關性評估、信息動力學模型和相關時空推理能力,以及獲取自身傳感器以外信息的社會能力,而且所提出的邏輯路徑場景表明,環境屬性幾乎沒有相關的信息可顯著提高自主智能體的性能。未來的工作將解決基于動態決策網絡和信息價值理論的情境感知及其度量的理論基礎。
最后,情境覺知本質上是完善決策過程的一種自然主義方法。例如,一項基于自然主義決策開發的海軍戰術決策原型的決策支持系統(decision support system,縮寫DSS),6 通過基于識別-啟動和基于解釋的推理過程以及對艦載作戰信息中心(Shipboard Combat Information Center)海軍戰術軍官面臨的決策問題的認知分析,發展出用于支持關鍵決策任務的顯示器。在高強度、模棱兩可的情境下進行的基線測試表明,經驗豐富的決策者沒有很好地為當前系統服務,他們的不良表現顯示出定期喪失對情境的認識。一項研究描述了八個專家海軍戰術決策團隊,他們單獨使用其當前系統,或者與原型DSS一起使用。當團隊有原型DSS可用時,要澄清戰術局勢的通信大大減少了,但較在場景早期發現的關鍵接觸要多得多,較針對迫在眉睫的威脅采取的防御行動要多得多。這些發現表明,原型DSS提高了指揮官對戰術形勢的認識,這反過來又有助于提高信心、減少工作量,讓行動表現更有效。
六、結語
綜上,情境覺知理論是一種復雜系統決策模型。在自然主義決策的基礎上,個人的情境覺知被認為是決策過程的關鍵。就個人具有同一性而言,情境覺知是一個通用結構,可適用于各種各樣的環境和系統,而且是由個人對動態環境的知識狀態組成的。也就是說,情境覺知整合了相關要素的感知、這些要素在于與操作者關聯和組合之含義的理解,以及基于這一理解對環境未來狀態的預測。作為一種為使人工認知系統具有那樣的感知能力的理論,無論在理論上還是實踐上,都取得了令人矚目的成就。然而,情境覺知理論顯然還沒有達到人們所期待的結果,還沒有達到人類水平的智能和感知,這是該理論今后要進一步深入研究的問題,如與語境覺知結合可望有所突破。
Abstract: How to make robot, an artificial cognitive system, acquire human-level intelligence is the main goal of artificial intelligence development at present. To achieve this goal, the operating mechanism and mode of human intelligence are undoubtedly the best model for artificial intelligence simulation. The development of situation awareness theory provides a reasonable framework and methodology for achieving this goal. This is the problem to be clarified about the matching of the general model, attention mechanism, situation awareness goals and psychological models. The event-control-action-adaptation model is the further development of situation awareness theory and highlights the characteristics of adaptive representation. All kinds of application software based on situational awareness theory are not only technical means, but also methodology, which are embodied in all aspects of artificial cognitive system design.
Key words: artificial intelligence; artificial cognitive system; situation awareness; adaptive representation
(責任編輯:蘇建軍)
猜你喜歡
西安航空學院學報(2022年2期)2022-07-04 07:45:42
汽車零部件(2020年3期)2020-03-27 05:30:20
表面工程與再制造(2019年1期)2019-05-11 08:52:04
商界(2019年12期)2019-01-03 06:59:05
家庭影院技術(2018年9期)2018-11-02 05:31:34
IT經理世界(2018年20期)2018-10-24 02:38:24
通信電源技術(2018年3期)2018-06-26 06:33:30
軍營文化天地(2018年1期)2018-02-10 05:19:25
小康(2017年16期)2017-06-07 09:00:59
學與玩(2017年12期)2017-02-16 06:51:12
