水下攻防武器能源動力技術發展現狀及趨勢
2022-01-15 08:06:38史小鋒黨建軍胡利民
水下無人系統學報 2021年6期
關鍵詞:發動機
史小鋒, 黨建軍, 梁 躍, 胡利民, 路 駿, 喬 宏
水下攻防武器能源動力技術發展現狀及趨勢
史小鋒1, 黨建軍2, 梁 躍1, 胡利民1, 路 駿1, 喬 宏1
(1. 中國船舶集團有限公司 第705研究所, 陜西西安, 710077; 2. 西北工業大學 航海學院, 陜西西安, 710072)
能源動力系統是水下攻防武器的心臟, 其性能很大程度上影響了水下攻防武器的任務范圍和作戰效能。文中從分析水下攻防武器對能源動力技術的需求出發, 以魚雷和無人水下航行器為重點, 梳理了水下攻防武器能源動力技術的發展現狀, 介紹了美國、俄羅斯、日本以及歐洲各國在能源動力技術方面的特點, 從熱動力能源、電動力能源、熱機和電機4個方面探討了水下攻防武器能源動力技術的發展趨勢。總結得出, 水下攻防作戰逐漸顯示出無人化和體系化的特點, 要求水下攻防武器具備遠航程、寬速域、大深度的能力, 而能源動力技術則相應地圍繞高能量密度能源、高功率密度動力2個主題持續發展。
水下攻防武器; 能源動力系統; 魚雷; 無人水下航行器
0 引言
水下攻防武器主要是指魚雷、反魚雷魚雷、無人水下航行器(unmanned undersea vehicle, UUV)、反UUV武器等用于水下攻防作戰的各類武器, 主要承擔反潛、反艦、魚雷防御、UUV反制等任務, 是執行水下攻防作戰的必要裝備, 也是海軍水下攻防裝備體系中的重要組成部分。
根據未來水下攻防作戰任務需求, 水下攻防武器的典型作戰模式包括遠程快速精確打擊、超遠程巡航隱蔽攻擊、大深度反潛等, 要求水下攻防武器具備遠航程、寬速域、大深度的能力。
重型魚雷作戰一般分為中低速線導隱蔽接敵段和末端高速攻擊段, 為保證快速接敵和對敵目標的有效打擊, 導引接敵段速度一般不小于25 kn, 末端高速攻擊段不小于50 kn, 且要求魚雷的最大航速為目標航速的1.5倍以上。隨著現代大型艦艇編隊對潛探測距離的進一步擴大, 重型魚雷要進一步提高打擊半徑, 滿足反潛防區外精確打擊要求, 需要魚雷航程由目前的50 km提高到80~100 km; 隨著現代大型艦艇的航速不斷提升, 如美國瀕海戰斗艦的最高航速可達45 kn, 需要魚雷最大航速由目前的50 kn提高到70 kn。
超遠程巡航打擊是一種非接觸自主作戰形式, 以海區控制、水下定點打擊為目的, 對航母編隊、海上兵力集團以及運輸船隊等實施打擊的新型水下作戰方式。以兵器深入替代兵力深入, 實現對航母編隊的威懾和打擊, 也可在有限時間內封鎖港口和航道。攻擊型UUV從敵防區外釋放, 以中低速(4~12 kn)航渡上千公里至預定的控制或封鎖海域; 到達就位點后, 以低速(4 kn左右)巡航模式搜索目標; 發現目標后解算目標運動要素并占領攻擊陣位, 變高速(35 kn以上)攻擊模式直接對目標實施打擊。
為滿足大深度反潛作戰需求, 魚雷最大作戰深度應覆蓋目標潛艇最大下潛深度。例如, 美國“海狼”級核潛艇航深達到610 m, 前蘇聯“阿爾法”級核潛艇航深達到900 m[1]。
能源動力系統作為水下攻防武器的心臟, 是將水下攻防武器自身攜帶能源的化學能或電能轉換為推進其航行的機械功, 其性能和特點不僅決定了魚雷武器主要戰技指標(航程、航速及航深), 同時也決定了其隱蔽性、維修性和安全性等方面的性能。為滿足上述作戰任務需求, 并適應于水下特殊環境(海水阻力和壓力等), 對水下攻防武器的能源動力系統提出了以下獨特要求:
1) 在有限的體積和質量約束下, 所用的能源形式具有高能量密度的特點, 所用的動力形式具有高比功率和高效率的特點, 以滿足水下攻防武器的航速和航程需求;
2) 能夠不依賴大氣中的氧氣獨立工作, 克服航行深度變化帶來的海水背壓影響, 保證推進功率基本穩定;
3) 具備多速制工作能力, 以增大航程, 提高隱蔽性等, 滿足多任務功能需求;
4) 具有盡可能低的振動能級與輻射噪聲, 具有寬頻域的聲隱身性能, 既不影響自導系統工作, 又避免被敵方探測, 如有廢工質排出, 應盡可能溶解于海水, 降低航跡影響;
5) 可多次重復使用;
6) 存儲周期長, 儲存后能快速可靠啟動工作;
7) 具有高安全性, 攜帶無腐蝕和無毒(或低毒)能源;
8) 工作可靠, 便于維護操作和使用。
上述特殊要求使得水下攻防武器的能源動力技術獨具特色、自成體系, 其他行業成熟的能源動力形式難以采用, 因此一直是困擾水下攻防武器性能大幅提升的重大技術瓶頸。
文中以魚雷和UUV為重點, 分析了水下攻防武器能源動力系統的特點, 介紹了國外在水下攻防武器能源動力領域的研究歷程和最新進展, 結合水下攻防作戰需求, 探討了水下攻防武器能源動力技術的發展趨勢, 并對我國水下攻防武器能源動力技術未來發展的重點方向提出建議。
1 水下攻防武器能源動力技術發展現狀
1.1 魚雷能源動力技術
1.1.1 美國
美國擁有雄厚的經濟實力、工業生產能力以及科技后盾, 是魚雷能源動力領域的頭號強國。20世紀50年代之前, 美國魚雷以電動力為主。具體來說, 除MK16和MK17魚雷使用烴燃料+H2O2為能源、渦輪機為動力, MK40魚雷使用固體火箭發動機推進外, 其余如MK27~MK45、MK47等十多個型號均為電動力。20世紀50年代以后, 美國魚雷逐漸轉為以熱動力為主。圖1歸納了美國魚雷裝備及其能源動力技術的發展歷程。
在輕型魚雷方面, 采用OTTO-II單組元燃料、凸輪活塞式發動機研制了63 kW功率的熱動力系統, 用于MK46 Mod1~Mod7和MK54高性能輕型反潛魚雷, 構建了美國半個多世紀的輕型反潛魚雷發展基礎。20世紀70年代后, 為對抗前蘇聯1000 m大深度雙層核動力潛艇, 歷經20多年發展了以Li/SF6金屬能源、高速蒸汽渦輪機為標志的閉式循環熱動力系統, 使輕型魚雷航速達到50 kn, 航深達到1100m, 該熱動力系統應用于MK50魚雷。
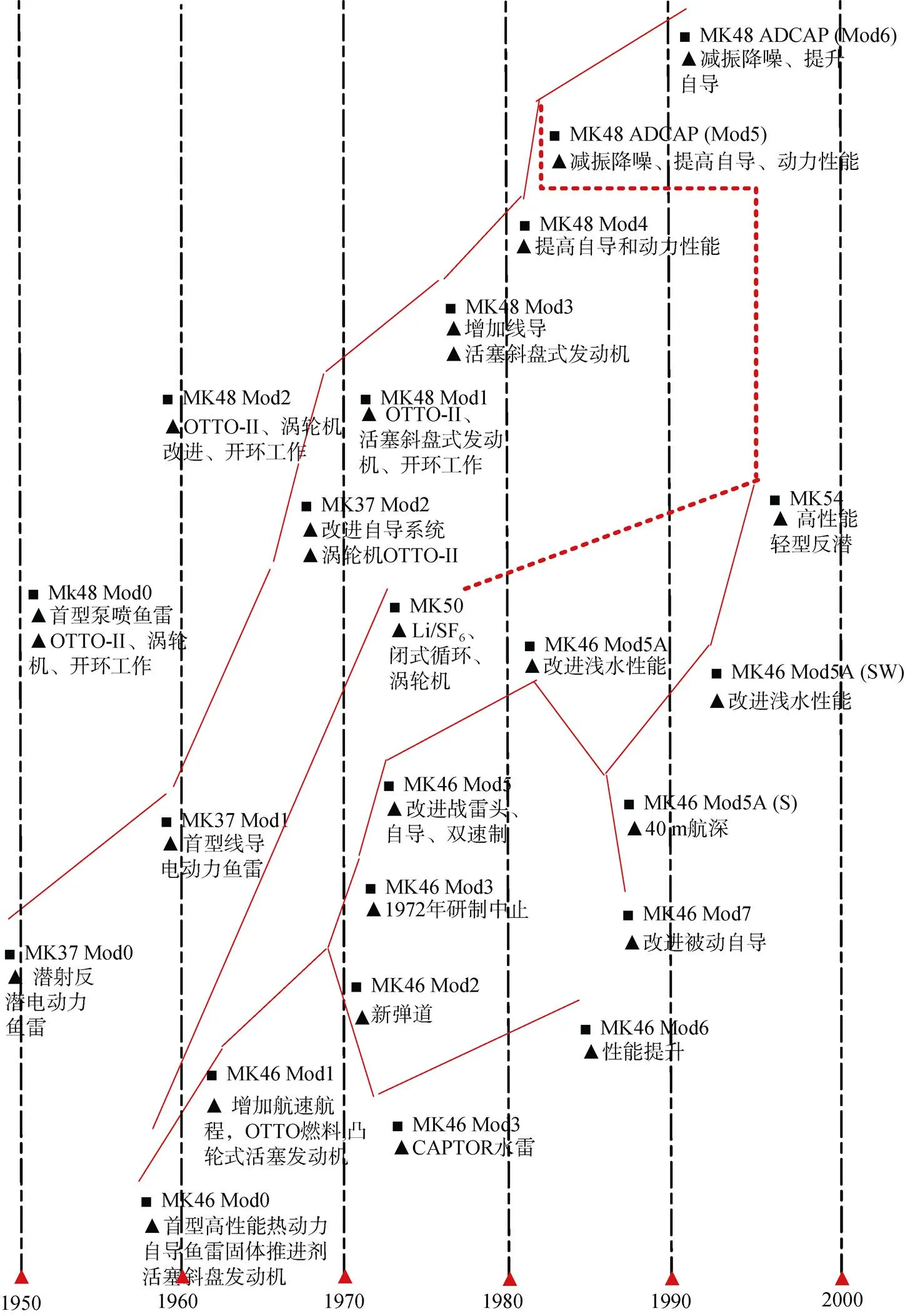
圖1 美國魚雷裝備及其能源動力技術發展歷程
在重型魚雷方面, 自20世紀60年代中期提出發展OTTO-II燃料的MK48熱動力通用重型魚雷, 奠定了活塞發動機動力系統在MK48系列魚雷上的應用基礎, 之后在減振降噪、增加速制、降低低速下限和提升高速上限等方面不斷改進, 形成Mod3、Mod4、Mod4M、Mod5(ADCAP)、Mod6AT和Mod7等系列產品[2]。
1) OTTO-II單組元燃料活塞機動力系統
為滿足324 mm直徑輕型反潛魚雷需求, 美國研發了采用OTTO-II單組元燃料, 功率為63~ 120 kW的一系列對轉輸出的筒型軸向活塞發動機, 其動力轉換機構分為雙向凸輪和周轉斜盤式兩類。功率63 kW的動力裝置采用單速制和雙速制工作模式, 使用5缸對轉軸向活塞發動機, 雙向正弦凸輪式動力轉換機構以及固定燃燒室, 應用于MK46和MK54魚雷。
為滿足533 mm直徑重型魚雷需求, 美國研發了采用OTTO-II單組元燃料、功率150~400 kW的一系列單軸輸出的斜盤活塞發動機。動力系統為雙速制或三速制, 旋轉燃燒室最大工作壓力為35 MPa, 大功率發動機采用單轉輸出, 低功率發動機采用單轉或對轉輸出, 應用于MK48魚雷。MK48魚雷能源動力系統在其后續改進的重點是滿足55 kn高速制和28 kn低速制的三速制工作和減振降噪改進, 其改進過程及要點見圖2。
2) OTTO-II單組元燃料渦輪機動力系統
美國重型魚雷用燃氣渦輪機動力系統1962年開始立項, 并由美國西屋電氣公司研制, 使用OTTO-II單組元燃料, 開式循環工作, 單軸輸出功率260 kW。在與活塞發動機動力競標失敗后, 西屋電氣公司提出了具有噪聲小、功率大特點的渦輪機動力改進方案, 最終應用于英國“旗魚”魚雷。
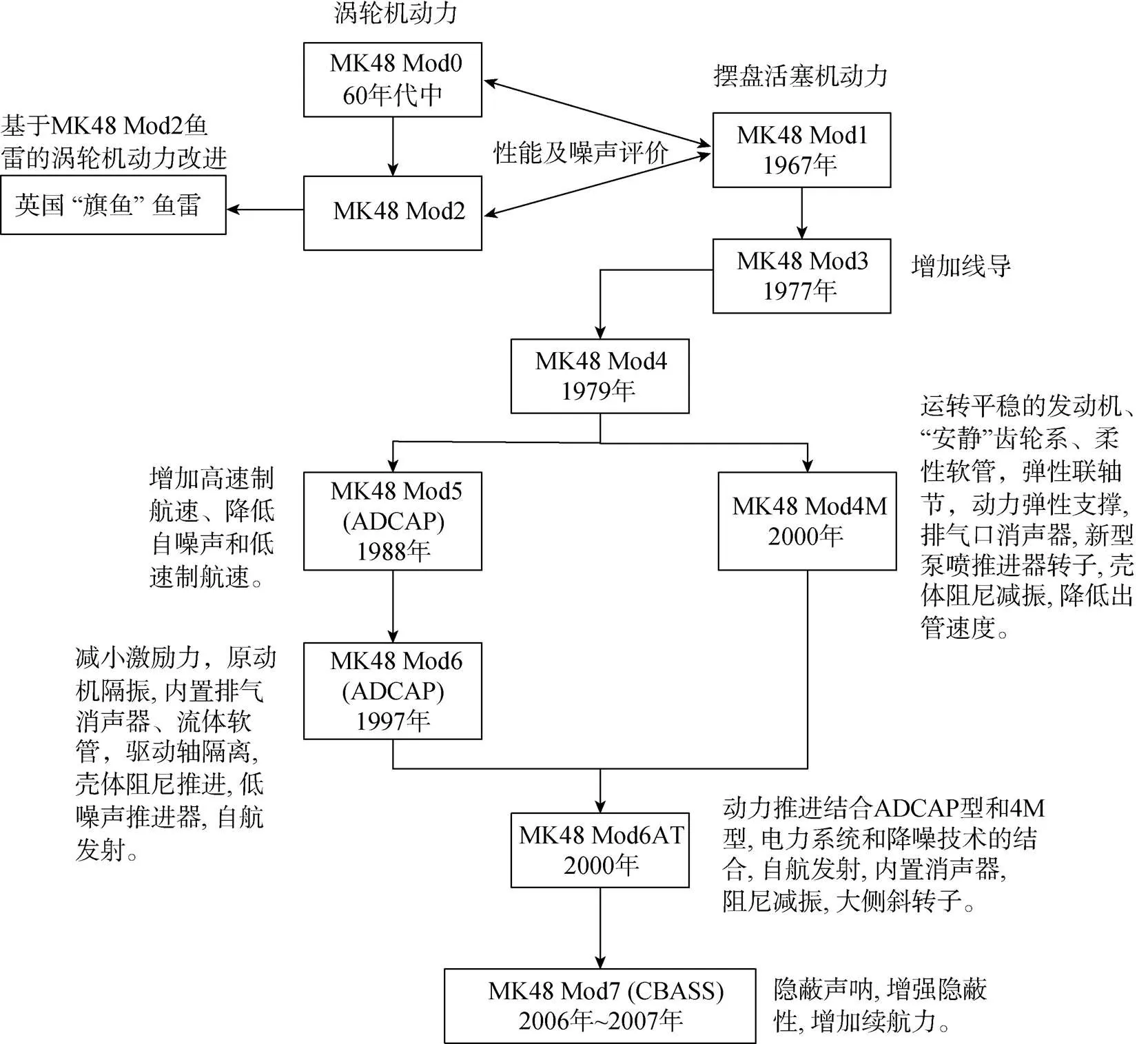
圖2 MK48魚雷能源動力系統研制及改進歷程
3) Li/SF6能源閉式循環動力系統
貯存化學能推進系統(stored chemical energy propulsion system, SCEPS)是一種基于Li/SF6能源的閉式循環汽輪機動力系統, 具有無乏工質航跡、工作效率與深度無關、運轉平穩、能量密度和功率密度高等優點, 其采用的閉式蘭金循環的理想轉換效率為33%, 實際轉換效率為21%。該系統首先由美國TRW公司提出并研制, 之后由賓夕法尼亞州立大學接管繼續研究, 可稱之為魚雷能源動力領域的劃時代發明。在此基礎上, 美國進一步開發了更先進的ADSCEPS(advanced SCEPS)系統, 大幅提高了蘭金循環效率, 并應用于MK50輕型反潛魚雷。但是, 該系統比MK46魚雷能源動力系統結構復雜, 制造和使用成本相對較高, 加之國際形勢發生變化, 因而未大批量裝備部隊。
近年來, 以“緊湊型快速攻擊武器”計劃為背景, 美國重拾Li/SF6能源閉式循環汽輪機動力系統的研發, 以替代高成本零部件, 并提高系統可靠性。2020年, 美國諾斯羅普·格魯曼公司將該技術應用于171 mm口徑超輕型魚雷原型樣機并測試成功。目前, 該超輕型魚雷項目已列入美海軍研制計劃, 裝備“弗吉尼亞”級攻擊核潛艇。
1.1.2 俄羅斯
俄羅斯繼承了前蘇聯的雄厚基礎, 緊跟世界技術發展潮流, 形成獨有的技術發展道路。20世紀30~40年代, 前蘇聯以重型反艦魚雷為目標, 自主研發煤油+空氣(氧氣)為能源的活塞發動機動力系統, 同時引進德國技術和人才發展煤油+ H2O2為能源的渦輪發動機動力系統。50~60年代, 在將上述技術形成多型魚雷裝備的同時, 開始反潛/反艦通用魚雷能源及動力技術的探索。70~80年代, 發展了單組元燃料斜盤活塞發動機和金屬水反應燃料閉式循環動力技術, 并系統開展了魚雷振動噪聲特性及控制措施的研究。進入90年代, 由于國家局勢動蕩, 其魚雷能源動力技術發展速度放緩, 但也減少了海軍不切實際需求的干擾, 憑借雄厚的技術基礎在斜盤活塞發動機、HAP三組元渦輪機技術研究和相應魚雷裝備研制中取得了突破, 在滿足俄羅斯海軍需求的同時進入國際市場。圖3歸納了俄羅斯魚雷裝備及其能源動力技術的發展歷程。
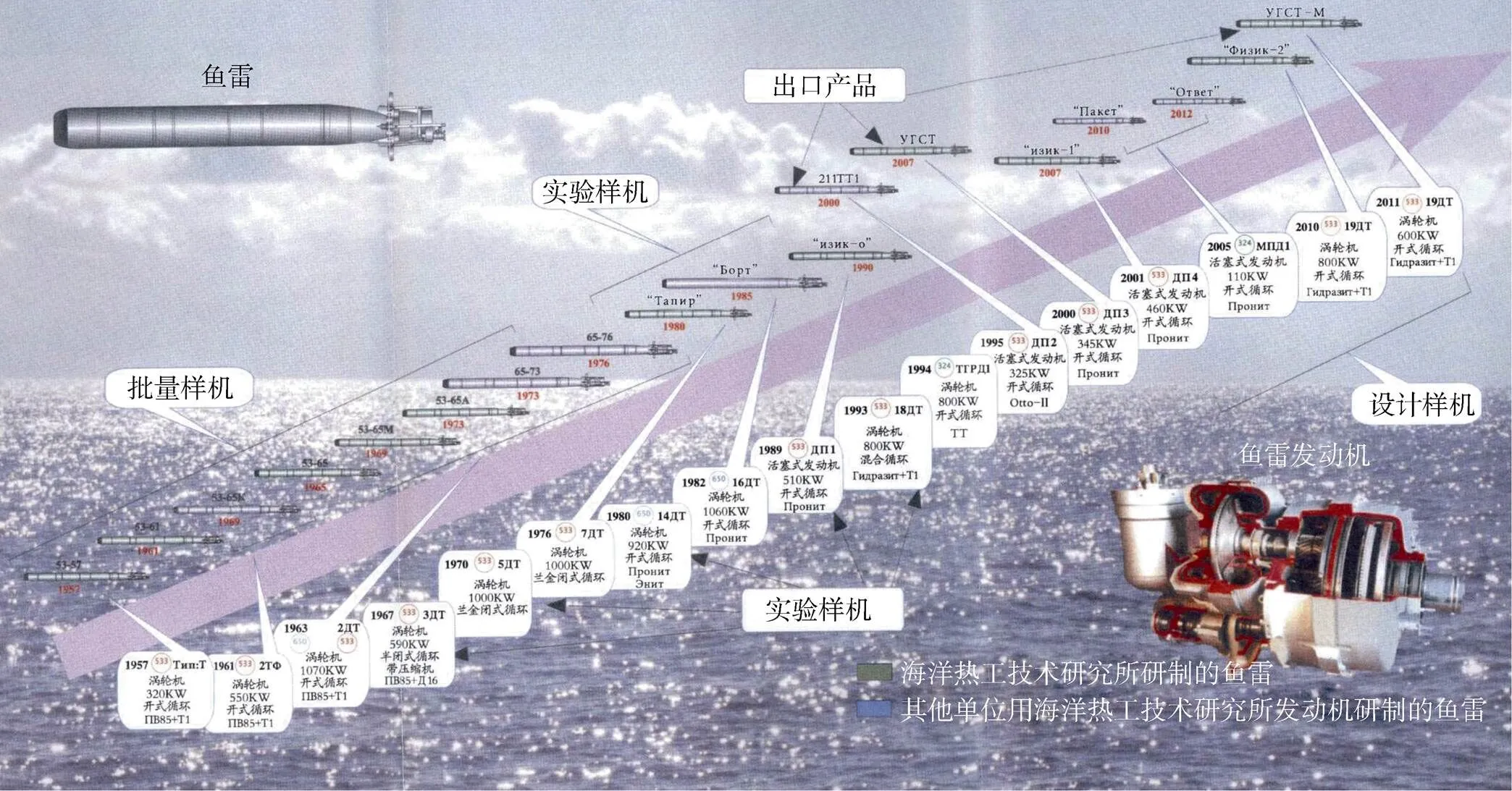
圖3 俄羅斯魚雷裝備及其能源動力技術發展歷程
1) H2O2+煤油+海水三組元燃料渦輪機動力系統
以H2O2+煤油+海水為能源的燃氣渦輪機動力系統是前蘇聯在20世紀40~70年代重點研究的魚雷能源動力技術, 研制了3型反艦魚雷用渦輪機動力系統, 其輸出功率由320 kW增加到1070 kW, 支撐了8型魚雷型號, 使得魚雷最高航速達到70 kn, 最大航程達到50 km。解決的重大技術問題和取得的標志性成果有:
a. 掌握了使用固體催化劑分解H2O2, 使用分解產物點燃碳氫化合物燃料;
b. 使用海水作為渦輪發動機工質成分, 在寬溫度范圍確保海水噴入條件下H2O2與煤油的有效燃燒;
c. 可變傳動比減速器的魚雷渦輪發動機;
d. 含2個燃燒室和噴嘴的渦輪機調控系統, 保證任何深度下雙速制恒定功率輸出;
e. H2O2的長期貯存和遠程監控系統;
f. 通過采取減震降噪措施, 渦輪機動力的振動能級比活塞機動力低20~30 dB。
2) OTTO-II單組元燃料活塞機動力系統
20世紀60年代末~80年代, 為了發展大深度通用型魚雷, 在深入了解和掌握美英等國魚雷動力技術的基礎上, 前蘇聯研究了OTTO-II單組元燃料和高比功率活塞發動機等技術, 研制出仿美國MK46魚雷的ДП-294凸輪活塞發動機、200 kW的ДПО-14對置式凸輪活塞發動機、510 kW斜盤活塞發動機。上述研究成果雖然大部分未形成裝備, 但為后續通用型魚雷發展奠定了堅實基礎。
進入90年代國家動蕩的艱難時期, 俄羅斯研發了345 kW和460 kW斜盤活塞發動機, 形成了50 kn和55 kn通用重型魚雷裝備, 其最大航深達到500 m, 滿足40~50 km的作戰航程需求。在輕型反潛魚雷方面, 研發了110 kW的斜盤活塞發動機, 裝備于30~50 kn雙速制輕型反潛魚雷, 最大航程達到20 km, 最大航深達到600 m。
3) OTTO-II+HAP+海水三組元燃料渦輪機動力系統
20世紀60年代末~80年代, 前蘇聯研制了直徑650 mm反艦魚雷用920 kW和1 060 kW兩型大功率雙速制渦輪機動力系統, 采用OTTO-II單組元燃料, 完成了陸上臺架和實航驗證, 最大航速時航行深度600 m, 降速后最大航行深度可達800 m。雖然直徑650 mm魚雷最終選擇了H2O2+煤油+海水三組元燃料渦輪機動力系統方案, 但上述研究工作為渦輪機動力系統的后續發展奠定了堅實的基礎。
進入90年代國家動蕩的艱難時期, 為彌補經費的不足, 俄羅斯研制了面向國際市場的線導通用重型魚雷UGST, 其采用OTTO-II單組元燃料和斜盤活塞發動機[3]。為提升UGST魚雷性能以獲得更多國際訂單, 隨后將其動力系統升級為HAP+OTTO-II+海水三組元燃料的渦輪機動力系統, 可實現最高航速65 kn, 最大航深400 m, 混合航程60 km。
4) 半閉式與閉式循環動力系統
在1966~1968年期間, 前蘇聯開發了異丙基碳硼烷+92%~95% H2O2能源的大深度、大功率半閉式循環渦輪機動力系統, 其能量密度比煤油+ H2O2高30%, 燃燒產物中不可凝氣體減小3/5。該型動力系統僅完成部分參數的功率試驗, 可滿足500~600 m最大航深范圍內55 kn的魚雷航速需求, 但未達到800 kW的預定功率指標。1969~ 1985年, 前蘇聯開發了金屬水反應能源的多速制、1 000 kW閉式循環渦輪機動力系統。其顯著特點是采用已在超空泡魚雷驗證、30~40 mm/s燃燒速度的鎂金屬藥柱, 實現了動力系統的閉式循環工作, 不受海水背壓影響; 采用了魚雷頭部排出燃燒產物的排氣方式, 實現了輻射噪聲的屏蔽, 沒有明顯的航跡。在研制過程中共完成近900次的陸上臺架和實航試驗, 僅燃料燃燒系統試驗就進行了110次, 形成了幾十項技術發明。但是由于研制周期過長、國家財政經濟困難等因素影響, 特別是受OTTO-II單組元燃料活塞發動機動力系統研制進展順利的影響, 上述項目在進入國家發展計劃前被取消。
5) 金屬燃料水反應發動機動力系統
金屬水反應沖壓發動機是俄羅斯獨具創新的魚雷能源動力技術, 應用于世界首創的超空泡反艦魚雷“暴風雪”[3]。該發動機是以Mg基金屬燃料與海水反應生成工質, 以推動魚雷在水下空泡流場中以200 kn以上航速高速航行, 其航程可達10 000 m。
6) 渦輪噴水發動機動力系統
渦輪噴水發動機也是俄羅斯獨具創新的魚雷能源動力技術, 應用于直徑400 mm輕型反潛魚雷A3。該發動機在水下點燃固體藥柱產生燃氣, 燃氣帶動渦輪旋轉驅動泵噴推進器, 可使A3魚雷實現60 kn的航速, 最大深度為400~800 m, 最大航程為900~3400 m。
7) 核動力系統
2018年, 俄羅斯總統普京在國情咨文中公開了“波塞冬”核動力魚雷。同年, 俄羅斯國防部首次公開了“波塞冬”核動力魚雷的測試畫面。據稱該雷直徑為1.5 m, 長24 m, 采用核動力推進, 攜帶核戰斗部, 具備跨洲際打擊敵方沿岸目標和航母編隊的能力。分析公開資料可知, “波塞冬”核動力魚雷采用了尺寸小、啟動快、功率密度高的核反應堆, 其中液態金屬冷卻核反應堆可能性較大, 且與亞歷山德羅研究所研制的AMB-8型核反應堆密切相關。
1.1.3 歐洲
20世紀50年代, 由于核動力潛艇的發展, 潛艇航行深度大大增加, 不受背壓影響的電動力魚雷成為反潛的主要武器, 法、德、意等歐洲海軍強國開始大力發展魚雷電動力技術, 重點解決高能量密度和使用安全的魚雷動力電池。20世紀50年代以前, 電動力魚雷均采用傳統的鉛酸蓄電池。60年代前后, 重型魚雷先后采用Ag-Zn二次電池和一次電池, 輕型魚雷則采用Mg/AgCl海水電池。80年代末又成功研制輕型和重型魚雷用的Al/AgO電池。另一方面, 英國和瑞典對熱動力技術有較強的自主研發能力, 逆勢研制了OTTO- II+HAP+海水三組元燃料渦輪機動力系統和煤油+ H2O2雙組元燃料凸輪活塞發動機動力系統, 走出了具有自己特色的獨立發展道路。
1) Al/AgO電池+無刷直流電機動力系統
Al/AgO電池是戰雷用一次電池, 以鋁合金為負極, AgO為正極, 電解液以固態儲存的NaOH為溶質, 以海水為溶劑, 采用雙極性堆式結構。Al/AgO電池最初由美國海軍水下戰中心于20世紀70年代按相關專利開展應用研究, 原擬作為先進輕型魚雷(advanced lightweight torpedo, ALWT)的備選方案, 后由于選用SCEPS而中斷了發展。法國海軍裝備技術局于1977年委托SAFT公司繼續開展相關技術研究, 1980年正式按新一代輕型魚雷的要求進行研制, 并于1986年首次進行海上實航試驗, 為1990年服役的法國“海蟮”輕型反潛魚雷和1999年服役的法國、意大利兩國共同研制的MU90輕型反潛魚雷所采用[4]。在重型魚雷方面, 意大利的“黑鯊”魚雷[5]、法國的F21魚雷以及德國的DM2A4魚雷[6]均采用了Al/AgO電池。
2) OTTO-II+HAP+海水三組元燃料渦輪機動力系統
20世紀70年代末, 馬可尼公司按英國海軍參謀部第7525項要求決定研制一種可與美國MK48 ADCAP型魚雷競爭的新型自導熱動力重型魚雷——“旗魚”魚雷。該魚雷以OTTO-II+ HAP+海水三組元燃料為能源, 采用從美國購買的MK48 Mod2型魚雷的渦輪機技術, 研發了可變速的21TP01渦輪機, 采用轉速閉環控制, 通過改變變量泵斜盤角的方法調節燃料供應, 實現動力系統的速制轉換以及變條件下的恒功率輸出。通過使用HAP氧化劑極大地提高了魚雷的航速, 其最大航速達到70 kn, 航程40~54 km, 最大作戰深度約900 m。
3) H2O2+煤油雙組元燃料活塞機動力系統
瑞典一直以H2O2為氧化劑發展能源動力技術, 在研究多種燃料的基礎上, 選擇了85% H2O2和15%煤油配比的雙組元燃料, 研制了七缸軸向凸輪活塞發動機, 并應用于TP62和TP2000重型魚雷。為減小發動機的振動傳遞, 整個發動機安裝在魚雷殼體內的隔振元件上, 并選擇較低的工作轉速, 使得與活塞相連的滾子與凸輪在運動過程始終接觸。排出的廢氣經包圍在發動機外圍的冷凝器凝結成液態水和氣, 冷卻水被回收利用, 剩余的CO2經兩級壓縮排除雷外。由于CO2溶于海水, 因而魚雷航跡不明顯, 有利于隱身。
1.1.4 日本
日本是世界上較早使用魚雷和自行研制魚雷的國家之一。19世紀末, 日本在中日甲午戰爭和日俄海戰中首先大量使用了從國外購買的魚雷。 1910年, 其自行研制的第一型43式魚雷問世, 使日本進入世界魚雷生產國之列。第二次世界大戰前, 日本魚雷有了較大發展, 研制出了20多種新型魚雷。其中, 1933年研制的93式氧氣魚雷, 直徑為610 mm, 航速49 kn, 航程為20 km, 是當時直徑最大、速度最快、航程最遠的魚雷。二戰后, 日本戰敗, 魚雷事業一度蕭條。20世紀50年代中期, 日本建立海上自衛隊, 靠購買美國魚雷供部隊使用。雖確立了自行開發國產魚雷的方針, 但自行研制僅處于起步摸索階段。60年代初, 日本經濟逐漸恢復, 在美國的支持下開始重建魚雷工業, 在防衛廳下成立了第五(魚雷)研究所承擔魚雷研制工作, 并確立長崎制造廠、日立制造廠、神戶制鋼廠、日本電氣和三中電氣等為魚雷及其發射裝置的生產基地, 又在相模灣建立了魚雷靶場, 從而形成魚雷科研、生產和試驗一條龍體系。
縱觀日本戰后幾十年魚雷的發展, 一方面緊跟美國, 盡可能引進美國當時先進的魚雷; 另一方面在消化、借鑒美國先進魚雷技術的基礎上開展獨立研制, 力圖在動力等關鍵性能方面趕超美國。例如日本89式魚雷, 它是一型反潛反艦通用重型魚雷, 于70年代初參照美國MK48Mod1型魚雷研制, 于1989年定型小批量生產并服役, 其能源動力系統采用酒精+H2O2、具有強制排氣功能的斜盤活塞機動力系統, 滿足航速40 kn和55 kn雙速制工作, 最大工作深度為900 m, 混合航程50 km。由于酒精+H2O2雙組元燃料比OTTO-II單組元燃料能量密度更高, 使得89式魚雷的性能甚至優于MK48Mod1型魚雷。又如日本97式魚雷, 它是一型輕型反潛魚雷, 于80年代初參照美國MK50魚雷研制, 采用Li+SF6能源閉式循環動力系統。2012年, 日本開始研發新一代GRX-6潛用重型魚雷, 其最突出的特點在于能源動力技術, 由于采用了氫氧能源, 可使航程提高至80 km, 航深提高至1 200 m。
1.2 UUV能源動力技術
1.2.1 美國
美國海軍迄今已開展多項裝備攻擊型核潛艇的UUV項目計劃, 包括近期水雷偵察系統(near- term mine reconnaissance system, NMRS)、遠期水雷偵察系統(long-term mine reconnaissance system, LMRS)、任務重組式UUV(mission reconfigurable UUV, MRUUV)、大直徑MRUUV(large diameter MRUUV, LDMRUUV)以及“曼塔”(Manta)探索型UUV等。圖4為美國研制的各型UUV。

圖4 美國研制的各型UUV
進入21世紀后, 美國海軍提出“21世紀海上力量”戰略構想, 計劃將在2030年前組建一支由2 000艘不同級別UUV組成的水下艦隊, 主要用于淺海、近岸、港口處對敵情報搜索和偵查監視, 進行反潛戰和反水雷作戰, 滿足國防和反恐需求[7]。2004年, 美國海軍又發布了新的UUV發展規劃, 提出為適應長期情報監視、偵查或作戰需求, 需研發長續航力、高可靠性的能源動力系統, 將現有UUV續航力從10~40 h提高至幾天甚至幾周[8]。在上述需求的刺激下, 美國的民用UUV公司開始涉足軍用UUV領域并獲得成功, 例如Remus系列、Bluefin系列UUV均是從民用成熟產品改進而來, 其動力電池普遍采用鋰離子電池。但鋰離子電池的能量密度提升空間有限, 為滿足UUV未來發展需求, 可實現更高能量密度的燃料電池逐漸受到美國海軍重視[9]。
1) 鋰離子電池
鋰離子電池是現在應用最為廣泛的電池之一, 其具有比能量高、電動勢高、循環使用壽命長、無記憶效應等優點。自1990年日本將鋰離子電池商品化以來, 其優越的性能獲得了世界各國的關注。21世紀初, UUV開始應用鋰離子電池, 其航速和續航力都得到了一定程度的提高。隨著鋰離子電池技術的進步, 其性能提升的同時成本進一步降低, 并逐步替代銀鋅電池等成為UUV普遍使用的電池。例如美國的REMUS系列和Bluefin系列UUV(見圖5)均采用了鋰離子電池[10]。

圖5 Bluefin-12D UUV及其鋰離子電池
2) 燃料電池
2011年, 美國發布了2項燃料電池動力UUV項目, 分別為大直徑UUV(large displacement UUV, LDUUV)創新性海軍樣機項目和長航時UUV (long endurance UUV, LEUUV)未來海軍能力項目。LDUUV項目旨在研制一型直徑48 inch(約1.22 m)的大排水量UUV, 通過港口布放和回收, 可在公海潛航或在近海執行超視距任務。LDUUV項目要求燃料電池容量達到1.8 MWh, 比能量達到1 000 Wh/L, 從而將續航力增加至70 d, 期間可加注燃料實現多次啟停[11]。LEUUV項目旨在研制一型直徑21 inch(約0.53 m) UUV, 要求其燃料電池動力系統比能量達到300~500 Wh/L, 續航力30 h, 期間可加注燃料實現多次啟停[12]。2012年, 美國海軍研究局分別向General Atomics公司、Sierra Lobo公司、UTC公司、Nextech材料公司、Lynntech公司、Fuel cell Energy公司等多家公司和研究機構授予合同, 為LDUUV和LEUUV項目研發燃料電池動力系統, 相關研究進展歸納如下。
a. 20世紀90年代, United Technologies Cor- poration公司(后更名為International Fuel Cells公司)在美國國防部高級研究計劃局的資助下研制了由4個質子交換膜燃料電池組成的15 kW推進系統, 擬應用于48 inch(約1.22 m)直徑的UUV。該系統已完成了500 h實驗室測試, 但未進行海上實航試驗[13-14]。
b. 2012年, 美國海軍研究署授子Fuel cell Energy公司380萬美元研發合同, 用于為LDUUV研制固體氧化物燃料電池動力系統。該系統以JP-l0燃油和液氧為燃料, 可產生1 800 kWh的電能, 滿足LDUUV航行70 d的需求。Fuel cell Energy公司已完成280 kW固體氧化物燃料電池研制和28 000 h壽命測試[15]。
c. General Atomic公司和Infinity公司聯合研制了用于LDUUV的5 kW質子交換膜燃料電池動力系統。其中: Infinity公司負責研制燃料電池, 其特點是采用了先進的被動排水技術和簡化的輔機設計[16]; General Atomic公司負責研制鋁水反應制氫裝置, 已完成40 h不間斷測試[17]。
d. 2014年, Nextech公司(后更名為Nexceris公司)研制了用于LEUUV的固體氧化物燃料電池動力系統, 采用JP-l0燃油和液氧為燃料, 可提供2.5 kW輸出功率和40 h續航時間[18]。
e. Lynntech公司研制了用于LEUUV的質子交換膜燃料電池動力系統, 采用硼氫化鈉和H2O2作為燃料。燃料電池產生的水可與硼氫化鈉反應產生氫氣[19]。
f. 2011年, API公司研制了氯酸鈉制氧裝置, 可產生50 kg氧氣。該制氧裝置隨后與Nextech公司的固體氧化物燃料電池動力系統集成, 并應用于LEUUV[20-21]。
g. Sierra Lobo公司在LEUUV項目資助下研制了質子交換膜燃料電池動力系統(見圖6), 采用液氫和液氧作為能源, 燃料電池輸出功率10 kW, 續航時間85 h。 Sierra Lobo公司針對液態氫氧能源突破了套管式反應預熱、多層絕熱、低溫液體質量傳感器、脈沖管式冷卻等關鍵技術, 結合Teledyne公司專門研發的質子交換膜燃料電池, 使燃料電池動力系統的比能量達到350 Wh/kg以上[22]。
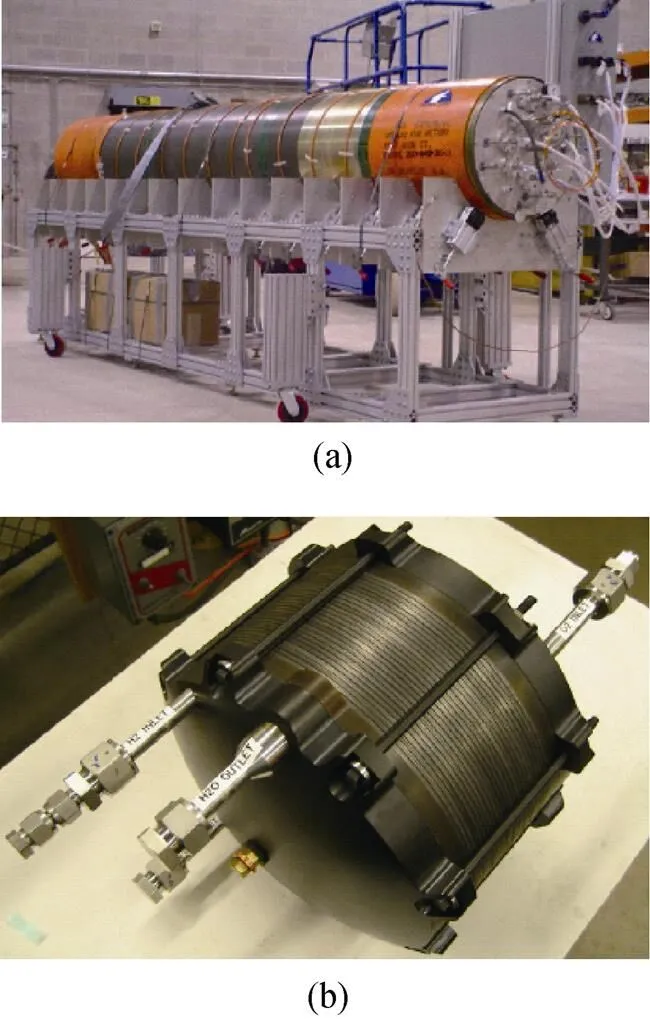
圖6 Sierra Lobo公司研制的LEUUV及其燃料電池
1.2.2 德國
德國ATLAS Elektronik公司研發了著名的“海鰭”魚雷。2001年, 該公司啟動了DeepC UUV的研制工作[23]。DeepC UUV有3個相連的艙室, 1個是載荷艙, 另外2個動力艙各裝有1個質子交換膜燃料電池(見圖7)。該燃料電池由ZSW公司研制, 每個燃料電池含30個電池單體, 輸出功率1.8 kW。氫氣和氧氣分別儲存在35 MPa和25 MPa的氣瓶中, 可提供140 kWh的總能量[24]。
1.2.3 法國
法國HELION公司是核電巨頭AREVA集團的子公司。2005年, 該公司啟動了IDEF UUV的研制工作(見圖8)。該UUV采用的質子交換膜燃料電池由63個電池單體組成, 輸出功率1.5 kW, 額定工況下效率約為55%。該燃料電池安裝在一個充滿氮氣的密封容器內, 使其在惰性環境中工作, 以防止氣體泄漏和氫氧混合爆炸。氫氣和氧氣分別儲存在30 MPa和25 MPa的氣瓶中, 可提供36 kWh的總能量。2009年10月, IDEF UUV共進行了7次下潛航行試驗, 2次試驗間隙采用標準的氫氧氣瓶為其加注燃料, 氫氧加注時間均不超過1 h, 顯著小于電池充電所需時間[25]。
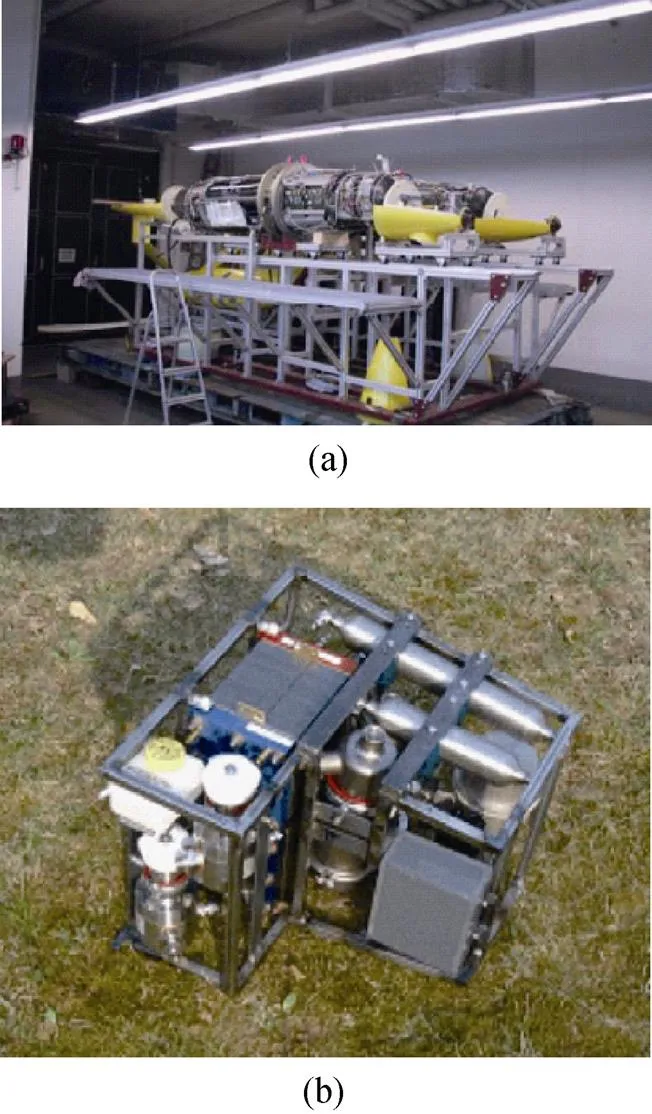
圖7 DeepC UUV及其燃料電池
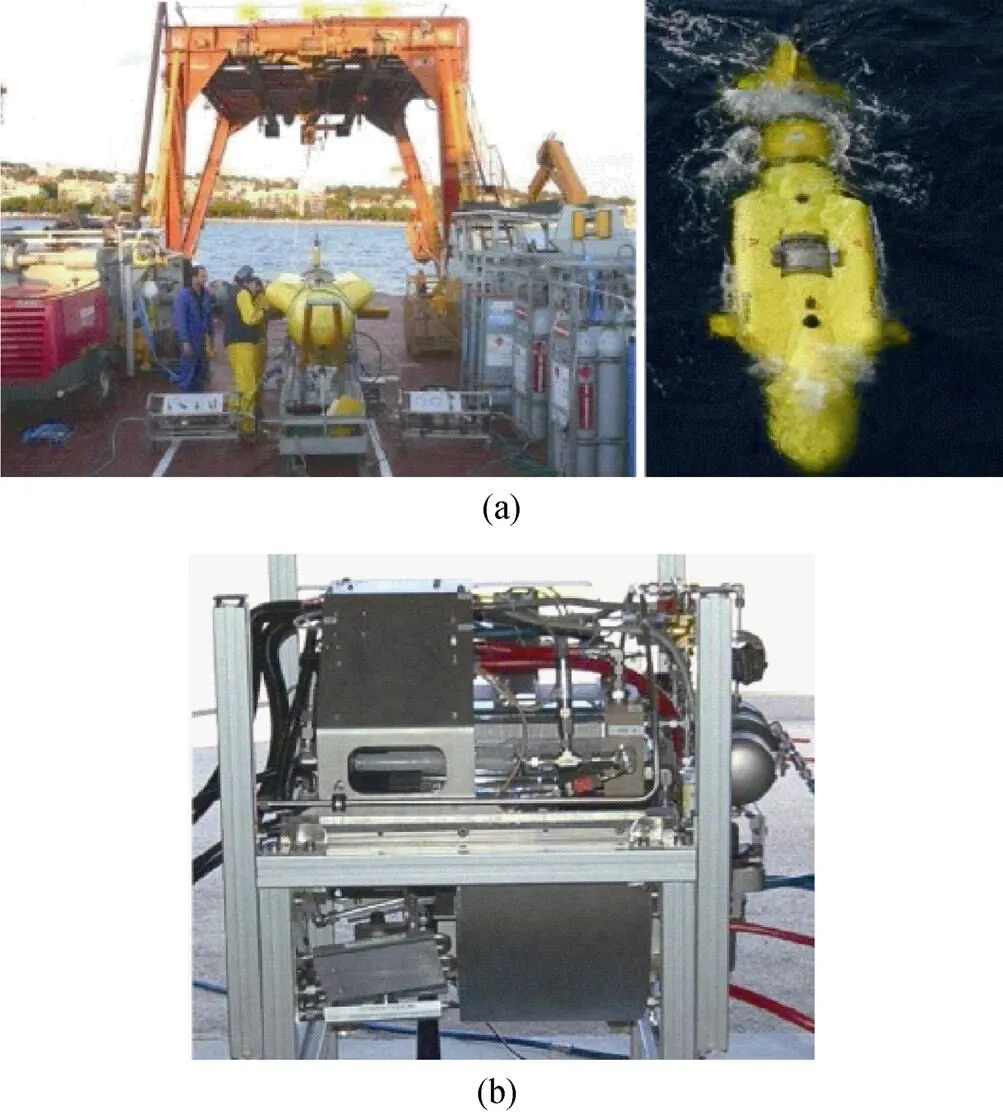
圖8 IDEF UUV及其燃料電池
1.2.4 日本
日本三菱重工從1998年開始研制Urashima UUV(見圖9)[26]。該UUV采用2個2 kW的質子交換膜燃料電池, 利用金屬氫化物為燃料電池供氫[27]。為防止氫氣泄露, 采用2個鈦金屬殼體的壓力容器將燃料電池和金屬氫化物分別包裹。氧氣儲存在容積0.5 m3、壓力為14.7 MPa的高壓罐中。在2005年2月的海試中, Urashima UUV創造了單次航行317 km的新紀錄, 所用航時為56 h, 平均航速約為3 kn, 航深800 m[28]。
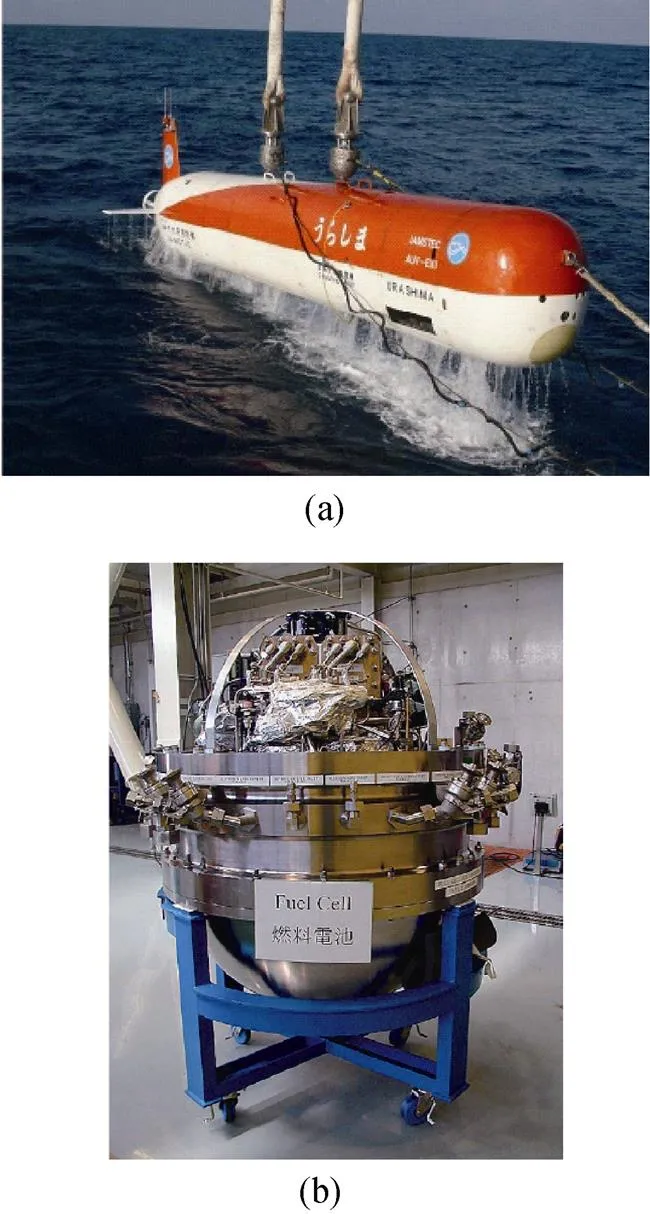
圖9 Urashima UUV及其燃料電池
2 水下攻防武器能源動力技術發展趨勢
從未來水下攻防作戰任務需求出發, 水下攻防武器正朝著“更快、更遠、更深、更靜”的方向發展, 同時也對能源動力系統提出了獨特的要求。分析水下攻防武器能源動力技術發展現狀, 其技術發展目標始終圍繞尋求更高能量密度的新能源和更高功率密度的新動力。其中, 新能源必將受到格外的重視, 新能源的應用必將牽引新動力的開發, 從而帶來水下攻防武器新的變革。
2.1 高能量密度新能源技術
2.1.1 熱動力能源技術
各種熱動力能源性能參數及優缺點分析如表1所示。通過分析得到熱動力能源的發展趨勢如下。
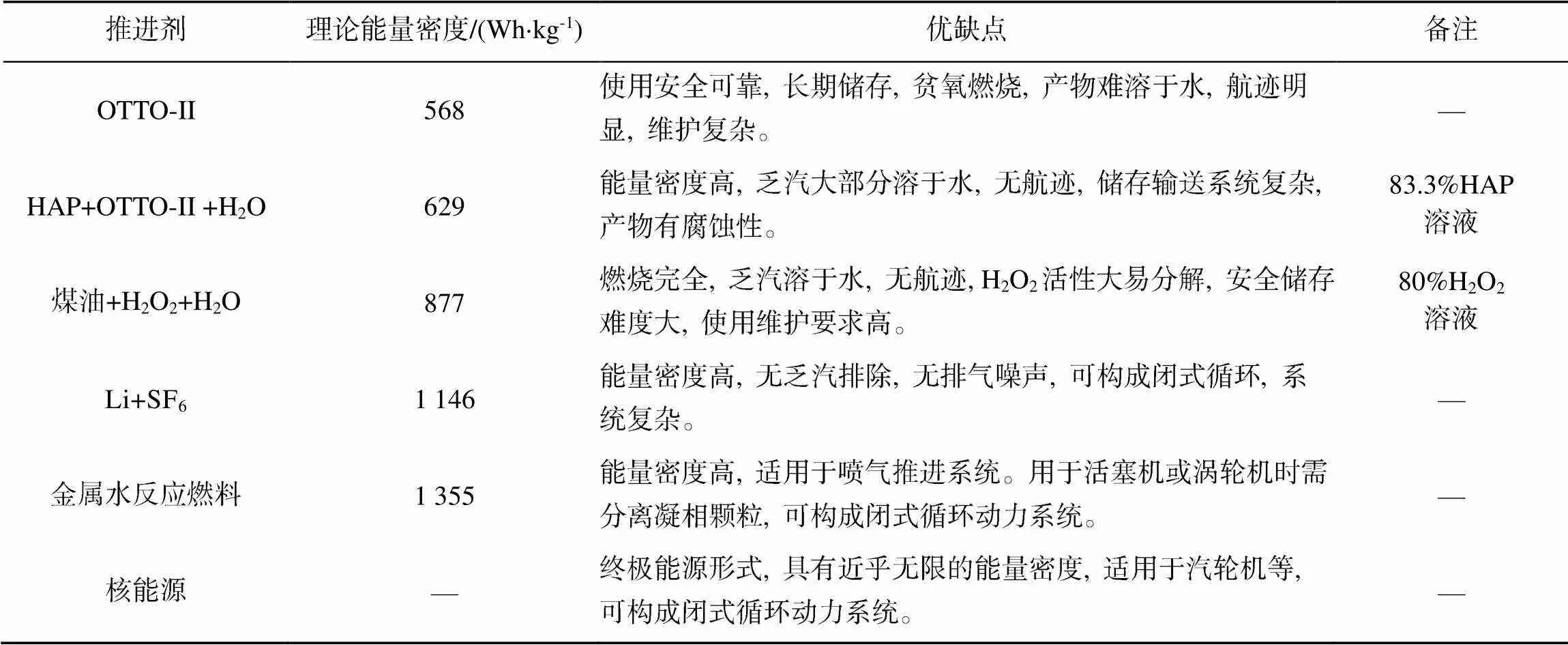
表1 熱動力能源性能參數及優缺點
1) 魚雷
OTTO-II單組元燃料一直是魚雷使用的主要能源, 其有利于簡化能源供應系統, 但能量密度提升空間有限。
三組元燃料(H2O2+煤油+海水、OTTO-II+HAP +海水)的能量密度高于單組元燃料, 且具有良好的航跡隱身性, 但會增加能源供應系統的復雜性。三組元燃料的未來發展重點是安全性較好的OTTO- II+HAP+海水三組元燃料。
Li+SF6(鍋爐反應器)、金屬水反應燃料均是以活潑金屬為基礎, 其能量密度比三組元燃料更高, 且可實現動力系統的閉式循環工作, 降低成本后是未來魚雷新能源開發的主攻方向。
核能源具有近乎無限的能量密度, 是戰略型魚雷的終極能源, 可使魚雷具備跨洲際打擊能力。
2) UUV
Li+SF6韋克(Wick)燃燒的熱管反應器, 可與蘭金循環汽輪機、布雷頓循環渦輪機、斯特林發動機等組成閉式循環動力系統, 適用于UUV小功率、長時間工作的應用場合, 其能量密度比較高, 是UUV能源的發展方向之一。
2.1.2 電動力能源技術
各種電動力能源的理論比能量如表2所示。通過分析得到電動力能源的發展趨勢如下。
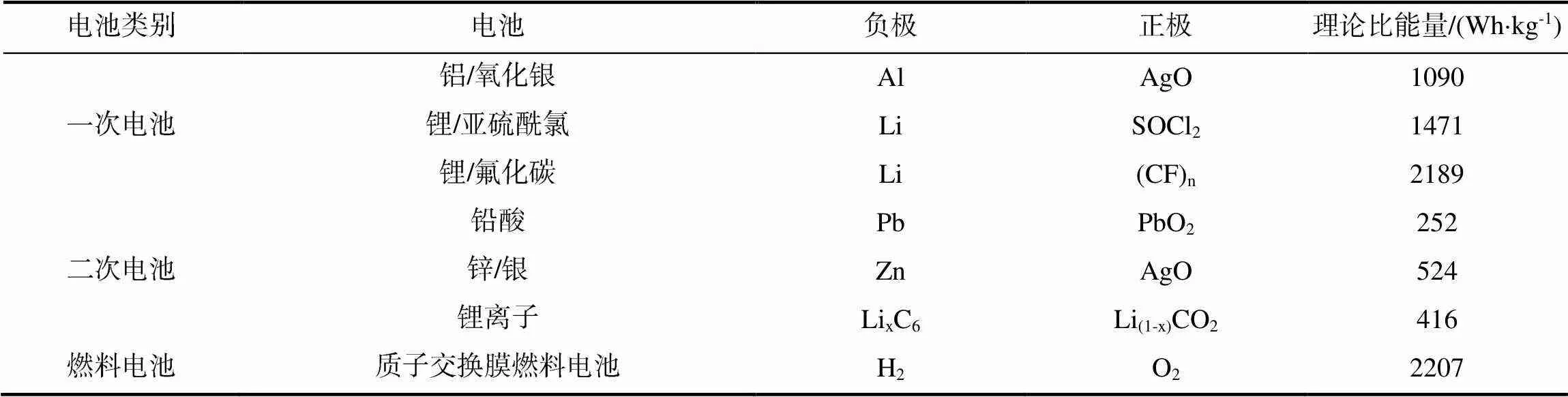
表2 電動力能源性能參數
1) 魚雷
各國海軍現役的魚雷動力電源主要為水系貯備一次動力電池, 如Mg/AgCl電池、Mg/CuCl電池、Zn/AgO電池、Al/AgO電池等。雖然水系貯備一次動力電池受制于穩定工作電壓偏低, 導致其質量比能量較有機體系能量密度低; 但水系電池電導率較高、熱容大的優勢能幫助其在大功率成組時具備更高的體積比能量, 且較易實現電池組的熱管控。
以Li/CFx電池、貯備式金屬氧化物鋰電池等為代表的有機體系高能電池雖然具有更高的能量密度, 但其在有限體積內大功率電池組高速工況下容易熱聚集, 進一步解決熱管理問題后, 可能成為未來魚雷動力電源的主要發展方向。
2) UUV
各國海軍現役的UUV電源主要為鋰離子電池, 具有比能量高、電動勢高、循環使用壽命長、無記憶效應等優點, 將會長期用于UUV。
燃料電池的能量轉換效率比熱機高2~3倍, 而氫氧能源是目前可預見的能量密度最高的非核能源, 燃料電池結合氫氧能源可實現高于一次電池和二次電池的能量密度, 是極具潛力的UUV動力電源。
2.1.3 混合能源技術
1) 熱-電混合能源
熱動力能源和電動力能源可構成熱-電混合能源, 具有技術成熟度高、使用成本便宜等優點, 是UUV的能源方案之一, 例如美國海軍近期采購的波音公司“虎鯨”UUV即采用了柴油/鋰電池混合能源系統。
2) 電-電混合能源
燃料電池和大倍率一次電池可構成電-電混合能源, 充分利用氫氧能源能量密度高、燃料電池能量轉化效率高的特點, 提高航程; 另一方面, 利用一次電池功率密度高、放電倍率大的特點, 提高航速。這種電-電混合能源既有高能量密度高, 又有高功率密度, 是水下攻防武器動力電源的重要發展方向。
2.2 高功率密度新動力技術
2.2.1 熱機技術
熱機發展重點在于開發體積緊湊、質量輕、功率大、效率高的原動機, 其具體發展趨勢分析如下。
1) 魚雷
活塞發動機的燃料經濟性和深度特性較好, 對深度的變化不敏感, 但受魚雷尺寸、質量和材料機械性能等限制, 進一步提高功率十分困難。目前, 輕型魚雷活塞發動機功率可達100 kW級, 重型魚雷活塞發動機功率可達500 kW級。
渦輪發動機結構相對簡單、輸出功率大、工作可靠, 可大幅提高魚雷航速。目前, 重型魚雷渦輪發動機功率可達1 000 kW級, 采取減振降噪措施后渦輪發動機的振動能級將顯著低于活塞發動機。另外, CO2超臨界工質渦輪發動機采用布雷頓熱力循環, 可大幅提高功率密度和能量轉換效率, 是未來渦輪發動機的重點發展方向。
金屬燃料水反應發動機屬于固液混合的火箭發動機, 可直接推動魚雷在水下航行, 使魚雷航速達到200 kn以上, 適用于超空泡魚雷。
2) UUV
蘭金循環汽輪機、布雷頓循環渦輪機、斯特林發動機等可構成閉式循環動力系統, 結合Li+SF6(熱管反應器)等新型能源, 可以實現比鋰電池+電機更高的能量密度和功率密度, 是UUV動力系統的發展方向之一。
2.2.2 電機技術
1) 魚雷
永磁同步電機具有功率密度高、效率高、噪聲低等優點, 功率密度可實現3.0 kW/kg以上, 將成為未來5~10年甚至更長的一段時間內魚雷推進電機的主要發展方向。
集成電機推進器是一種將電機移出魚雷殼體外直接同推進器組合的新型推進裝置, 具有高功率密度、高效率、安靜等特點, 其功率密度可達5.0 kW/kg, 是極具潛力的發展方向之一。
2) UUV
低速、大扭矩的永磁同步電機是目前國外無人潛航器普遍采用的推進電機方案, 相較于無刷直流電動機, 永磁同步電機在低速性能、噪聲特性、轉矩脈動等方面均表現更出色, 因此在未來一段時間內仍是UUV推進電機的主要發展方向。
集成電機推進器的高功率密度、高效率、安靜等特點也適用于UUV, 故也是UUV推進電機的重點發展方向。
3 結束語
進入21 世紀, 水下攻防作戰逐漸顯示出無人化和體系化的特點, 要求水下攻防武器具備遠航程、寬速域和大深度的能力。相應的, 水下攻防武器能源動力技術則圍繞高能量密度能源、高功率密度動力兩大主題發展。此外, 水下攻防武器的聲隱身與維修保障性也與能源動力系統密切相關。
1) 遠航程: 遠航程可以充分保證發射平臺的安全性, 提升對敵威懾效能。實現遠航程的根本在于高能量密度的能源, 應著重開發高能電池、氫氧燃料電池等新型能源, 并探索微型核能源在水下攻防武器的應用。
2) 寬速域: 寬速域可使水下攻防武器適應不同作戰任務需求, 滿足水下攻防作戰的體系化、網絡化及協同化要求。因此, 應積極開發高能電池動力系統、渦輪發動機動力系統以及適應超高速需求的金屬水反應沖壓發動機動力系統。
3) 大深度: 深海是地球上未被充分開發利用的區域, 必將成為未來海上軍事斗爭的主戰場。應積極開發適應大深度的半閉式循環、閉式循環動力系統, 以及全海深電池。
4) 聲隱身: 聲隱身對水下攻防武器的作戰效能有著決定性的影響, 因而是當前水下攻防武器最為關注的技術指標之一, 而能源動力系統是最主要的振動噪聲源之一。隨著探測技術的發展, 振動噪聲控制頻率應進一步向低頻、高頻延伸, 實現全頻域的聲學定量設計。
5) 維修保障性: 通過模塊化設計實現不同水下攻防武器的能源動力系統通用化可以減小維修保障負擔。此外, 能源動力系統在設計時應充分考慮維修保障性, 盡可能延長大中期檢修周期, 實現一次維修多次循環使用。
[1] 李宗吉, 高永琪, 王樹宗, 等. 現代魚雷-水下導彈[M]. 北京: 兵器工業出版社, 2016.
[2] 吳曉海. 美國MK48系列魚雷發展歷程帶給我們的啟示[J]. 魚雷技術, 2006, 14(3): 7-9.
Wu Xiao-hai. Inspiration from the Developmental Process of US MK48 Series Torpedoes[J]. Torpedo Technology, 2006, 14(3): 7-9.
[3] 傅金祝. 蘇聯/俄羅斯水中兵器的發展[J]. 現代艦船, 2007(9): 34-37.
[4] 盧軍, 陳立強, 崔和. 先進的多任務輕型魚雷MU90[J]. 魚雷技術, 2006, 12(1): 57-60.
Lu Jun, Chen Li-qiang, Cui He. Advanced multi-role lightweight torpedo MU90[J]. Torpedo Technology, 2006, 12(1): 57-60.
[5] 鄒宇. 來自羅馬的“黑鯊”魚雷-意大利白頭公司研制的重型魚雷[J]. 國際展望, 2003(24): 73-75.
[6] 李偉, 劉海光, 王華榮. 德國戰后第2代重型魚雷技術發展研究[J]. 艦船科學技術, 2020, 42(11): 185-189.
Li Wei, Liu Hai-guang, Wang Hua-rong. The Development of the Second Generation of Heavy Torpedo after the War II in Germany[J]. Ship Science and Technology, 2020, 42(11): 185-189.
[7] 路駿, 白超, 高育科, 等. 水下燃料電池推進技術研究進展[J]. 推進技術, 2020, 41(11): 2450-2464.
Lu Jun, Bai Chao, Gao Yu-ke, et al. Progress on Underwater Fuel Cell Propulsion Technology[J]. Journal of Propulsion Technology, 2020, 41(11): 2450-2464.
[8] U.S. Navy. The Navy Unmanned Undersea Vehicle Master Plan[R]. USA: U.S. Navy, 2004.
[9] 蔡年生. UUV 用動力電池現狀及發展趨勢[J]. 魚雷技術, 2010, 18(2): 83-85.
Cai Nian-sheng. Review of Power Battery for UUV with Development Trends[J]. Torpedo Technology, 2010, 18(2): 83-85.
[10] 龔鋒, 王力. UUV用動力鋰電池綜述[J]. 船電技術, 2013, 8(33): 17-20.
Gong Feng, Wang Li. Reviews of High Power Lithium Batteries Powered UUV[J]. Marine Electric & Electronic Engineering, 2013, 8(33): 17-20.
[11] U.S. Navy. Large Displacement Unmanned Undersea Vehicle System[R]. USA: U.S. Navy, 2011.
[12] U.S. Navy. Long Endurance Undersea Vehicle Propulsion[R]. USA: U.S. Navy, 2011.
[13] Rosenfeld R L, Prokopius P R, Meyer A P. Fuel Cell Power System Development for Submersibles[C]//Pro- ceedings of the 1992 Symposium on Autonomous Underwater Vehicle Technology. Washington DC, USA: IEEE, 1992.
[14] Meyer A P. Development of Proton Exchange Membrane Fuel Cells for Underwater Applications[C]//Proceedings of OCEANS’93. Victoria, BC, Canada: IEEE, 1993.
[15] None. FuelCell Energy Wins US Navy Contract to Develop UUV Power[J]. Fuel Cells Bulletin, 2012(8): 4.
[16] Malone M. Infinity-Air Independent Fuel Cells[EB/OL]. [2020-02-05].http://www.infinityfuel.com/products/air-independent-fuel-cells.
[17] Bever D. Energy and Power System for ONR’s LDUUV Program[C]//Fuel Cell Seminar and Exposition. Uncasville, CT, USA: General Atomics, 2012.
[18] None. Nextech Wins ONR Contract to Develop UUV Energy System[J]. Fuel Cells Bulletin, 2012(6): 4-5.
[19] Rhodes C, Fenimore J, Hennings B. Long Endurance Fuel Cell Energy System for Unmanned Undersea Vehicles[C]//Fuel Cell Seminar and Exposition. Uncasville, CT, USA: General Atomics, 2012.
[20] Swartz S L, Arkenberg G B, Thrun L B, et al. SOFC Based UUV Energy System[C]//Fuel Cell Seminar and Exposition. Uncasville, CT, USA: General Atomics, 2012.
[21] Presley K. A New Oxygen Source for SOFC Based Power Systems for Long Duration UUVs[C]//Fuel Cell Seminar and Exposition. Uncasville, CT, USA: General Atomics, 2012.
[22] Stoops B N. Navy SBIR/STTR Success[EB/OL]. [2013- 03-01]. http://www.navysbir.com/docs%20/Sierra_final_ onr.pdf.
[23] Hornfeld W. DeepC-the German AUV Development Project[EB/OL]. [2005-01-10]. http://www.deepc-auv.de/de epc/bibliothek/pdf/South_eng.pdf,
[24] Hornfeld W. AUV DeepC-Technology Platform for the ATLAS Elektronik AUV Family[C]//23rd International Conference on Offshore Mechanics and Arctic Engineering. Vancouver, CA, USA: OMAE, 2004.
[25] Raugel E, Rigaud V, Lakeman C. Sea Experiment of a Survey AUV Powered by a Fuel Cell System[C]// IEEE/OES Autonomous Underwater Vehicles. Monterey, CA, USA: IEEE, 2010.
[26] Yoshida H, Hyakudome T, Ishibashi S, et al. A Compact High Efficiency PEFC System for Underwater Platforms[J]. ECS Transactions, 2010, 26(1): 67-76.
[27] Yoshida H, Hyakudome T, Ishibashi S, et al. A High Efficiency PEFC System Development for Long-Range Cruising Autonomous Underwater Vehicles (LCAUVs)[J]. ECS Transactions, 2009, 17(1): 241-250.
[28] Toshio M, Shinji I, Kazuhisa Y, et al. Development of Fuel Cell AUV “URASHIMA”[J]. Mitsubishi Heavy Industries Technical Review, 2004, 21(1): 1-5.
Development Status and Trend of Energy and Power Technology for Underwater Attack and Defensive Weapon
SHI Xiao-feng1, DANG Jian-jun2, LIANG Yue1, HU Li-min1, LU Jun1, QIAO Hong1
(1. The 705 Research Institute, China State Shipbuilding Corporation Limited, Xi’an 710077, China; 2. School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an 710072, China)
As the heart of underwater attack and defensive weapons, energy and power systems have a significant impact on mission scope and operational effectiveness. In this study, the requirements of underwater attack and defensive weapons on energy and power systems are analyzed. The development progress of energy and power technology is summarized with emphasis on the torpedo and unmanned undersea vehicle(UUV). The technical expertise of the USA, Russia, Japan, and European countries is introduced. Finally, the trends of the energy and power technologies are discussed in terms of thermal propulsion energy, electrical propulsion energy, thermal engines, and electrical motors. In general, modern underwater attack and defensive warfare involve unmanned and systematized operations, which require a long cruise range, wide speed range, and large diving depth of underwater weapons. Accordingly, energy and power technologies are being developed with an emphasis on high energy density and high power density.
underwater attack and defensive weapon; energy and power system; torpedo; unmanned undersea vehicle
TJ630.32
R
2096-3920(2021)06-0634-14
10.11993/j.issn.2096-3920.2021.06.001
史小鋒, 黨建軍, 梁躍, 等. 水下攻防武器能源動力技術發展現狀及趨勢[J]. 水下無人系統學報, 2021, 29(6): 634-647.
2021-10-20;
2021-11-02.
史小鋒(1965-), 男, 研究員, 中國船舶集團高級專家、中國船舶集團有限公司第705研究所科技委主任, 主要研究方向為水下航行器能源與動力技術.
(責任編輯: 陳 曦)
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15