環形LED 陣列光源顯微成像系統設計
2022-01-14 08:02:40馬驍顏曉萌
科學技術創新 2021年35期
關鍵詞:系統
馬驍 顏曉萌
(廣東交通職業技術學院,廣東廣州 510650)
1 概述
雖然有許多先進的顯微成像設備被發明,例如電子顯微鏡、原子力顯微鏡、熒光顯微鏡等,傳統的明場光學顯微鏡仍舊是生命科學、材料學等領域不可替代的基本工具之一[1-4]。明場光學顯微鏡由照明光源、成像透鏡組,以及載物臺等部分組成。其中照明一般采用柯勒照明方式[1-4],照明光由鹵素燈這類熱光光源加熱燈絲產生。熱光光源雖然具有發光光譜寬、照明亮度高等優勢,但也存在光能轉化效率低,使用壽命短,需要散熱等缺點。而且,熱光光源燈絲要保證照明亮度,通常制成特定的彎曲形狀增大發光面積,只有使用復雜的光路,才能實現均勻的照明。相比之下,發光二極管(LED,Light emitting diode,LED)具有更高的發光效率,單色性好等優點,而且LED 本身具有聚光鏡結構,LED 芯片發出光線經過聚光鏡,可形成發散角較小的光束,當與樣品距離遠大于樣品的尺寸時,照射在樣品上的光束可近似看作平行光,無需復雜的光路,也可以提供均勻且高亮的樣品照明,因此,LED 正逐漸取代傳統照明光源,在顯微成像領域發揮著越來越重要的作用[5-9]。此外,單顆LED 體積較小,便于各種形式排布,實現各種入射角的調制照明,這是其他光源難以做到的。
本文根據顯微鏡成像系統特點,結合環形LED 陣列光源,給出了一套顯微成像系統設計思路,并列舉出了該裝置的使用實例,例如、差分相位顯微成像[10,11]、暗場成像[12]。
2 顯微成像系統設計
由于環形LED 陣列光源顯微成像系統,可以實現光場顯微成像、差分相位顯微成像、暗場顯微成像,需要對樣品進行軸向掃描拍攝。下面給出了一種實現軸向掃描自動化拍攝的顯微成像系統設計方案,該系統將包括硬件設計和軟件設計兩部分。在軟件的編程控制下,實現自動化的顯微成像拍攝。
2.1 硬件設計
在顯微成像系統中環形LED 陣列光源被放置在樣品正下方,其所在平面垂直于光軸,光軸穿過環形LED 陣列光源中心,LED指向決定照明數值孔徑,要求與當前顯微物鏡數值孔徑一致,與不同數值孔徑的物鏡匹配可采用多種環LED 陣列光源,根據需要控制其點亮環與所使用的物鏡照明數值孔徑匹配。成像系統中,所使用的無限遠顯微系統由物鏡和管鏡構成,通過物鏡的光線在物鏡后不直接成像,而是形成平行光束,進入管鏡,在管鏡一倍焦距附成像,成像探測器感光面與管鏡后焦面重合。
為了便于自動對焦、尋找感興趣區域,以及軸向掃描完成三維測量,機械樣品位移臺由一個長程二維水平X-Y 位移裝置和一個長程高精度Z 軸向位移臺組成,樣品托架被固定在位移臺頂端,位于環形LED 陣列光源正上方。二維水平X-Y 位移裝置的作用是在水平方向大范圍調整樣品位置,便于尋找感興趣區域,而Z 軸向位移臺帶動樣品托架,實現高精度光軸z 方向調節,實現自動對焦并獲取樣品不同層的顯微圖像。樣品托架用于固定待測樣品。
2.2 軟件設計
軟件部分由拍攝準備程序段和拍攝程序段兩部分構成。準備程序包括光源初始化程序、位移臺初始化程序和相機初始化程序,在選擇成像模式時自動開啟。圖2 是拍攝程序設計流程圖。
初始化程序段是為了計算機與檢測硬件間的通信狀態,一般相機初始化程序較復雜,因此一般先從檢測相機的初始化,調試順利執行后,再進行其他初始化操作。
3 環形LED 陣列光源顯微成像實驗
采用上述設計方案可以實現多種成像模式,且可以應用不用倍數物鏡,這里分別采用100 倍物鏡和20 倍物鏡分別進行實驗,驗證設計方案的可行性。
3.1 差分相襯顯微成像
實驗中采用的環形LED 陣列光源如圖3 所示。
該光源由60 顆參數完全相同的LED 燈珠等間隔排列在環形內面,外徑176 mm,內徑140 mm,整體厚度15 mm,發光功率24 W,外殼采用鋁合金材質,便于散熱。光源發光中心波長520 nm,帶寬10 nm,該光源被放在下樣品正下方,光源面與樣品平面平行,光軸經過光源中心,入射角為~64°,計算得到照明數值孔徑NA=0.9。剛好與尼康100 倍(平場消色差物鏡,NA=1.25)顯微物鏡數值孔徑匹配。
無限遠顯微成像光學系統使用一臺標準透射式的明場顯微鏡(Nikon 80-i)機架來搭建。使用高速灰度CMOS 相機(Andor,Zyla 4.2P)對樣品進行拍攝。
機械樣品位移臺中樣品托架采用懸臂式結構如圖2 所示,樣品被固定在一端,為保證水平需要在另一端調整配重,保證z軸位移臺受力平衡。樣品托架選擇重量輕、機械強度高的鈦合金作為制作材料。高精度z 軸向位移臺使用納米級z 軸位移臺(PIHeraPiezo Linear Stage,P-621.1CD),閉環總調節范圍100 μm,精度0.4 nm。樣品為未染色的硅藻固定裝片。
設置拍攝位置,照明模式按照上半環LED 燈點亮,拍攝得到圖像I1 如圖4(a)所示,上半環LED 燈熄滅,下半環LED 燈點亮,拍攝圖像得到圖像I2如圖4(b)所示,根據公式差分相襯顯微圖像Id=(I1-I2)/(I1+I2),計算出差分相襯顯微圖像如圖4(c)所示,可以看到經過計算后的圖像中硅藻結構更加清晰了。
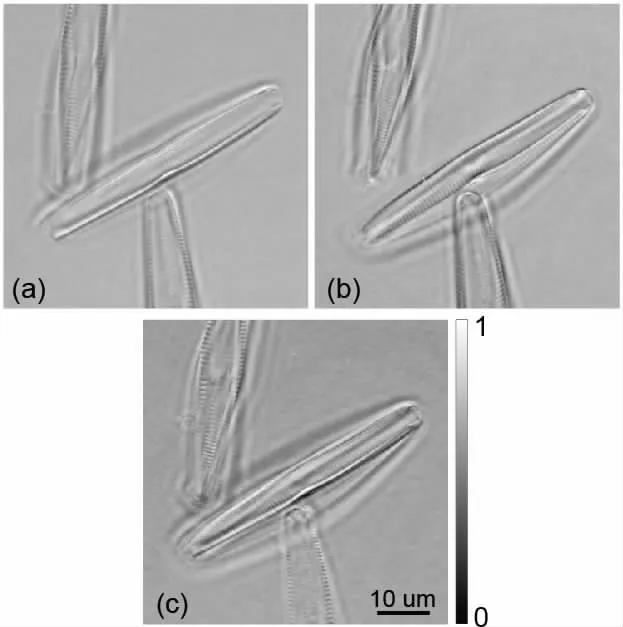
圖4 光場顯微成像圖像

圖5 草履蟲暗場顯微圖像
3.2 暗場顯微成像
實驗中采用的環形LED 陣列光源、無限遠顯微成像光學系統、機械樣品位移臺與3.1 節差分相襯顯微成像實驗中完全相同,為實現暗場成像,采用20 倍尼康物鏡(平場消色差物鏡,NA=0.4)。設置拍攝位置,照明開啟全部LED 燈進行拍攝,樣品為未染色的草履蟲固定裝片。
4 結論
本文簡要介紹了一種基于環形LED 陣列光源搭建的顯微成像系統,并根據設計方案搭建了實驗成像系統,拍攝了兩種模式的成像結果,驗證了設計方案的可行性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32