基于儲水艙式的電磁驅動仿生機器魚上浮下潛的研究
2022-01-14 08:02:40朱紅秀宋高明買浩楠薛逸飛田文健
科學技術創新 2021年35期
關鍵詞:實驗
朱紅秀 宋高明 買浩楠 薛逸飛 田文健
(中國礦業大學(北京)機電與信息工程學院,北京 100083)
1 概述
對于仿生機器魚來說,擁有較好的巡游能力和機動能力,是人類研究的關鍵。不僅要能進行直線的自由游動[1],而且在轉彎、浮潛、倒退等動作上也應自如游動,達到三維空間的游動要求。
本文基于電磁驅動機器魚[2],采用儲水倉法完成機器魚的浮潛運動。在浮力不變的情況下,通過儲水倉的進水和出水改變機器魚的重力,使機器魚在水域較窄的環境下上浮與下潛。
2 電磁驅動機器魚的總體設計
2.1 電磁驅動機器魚結構組成
機器魚由頭部、中部和尾部電磁驅動器組成。魚體頭部固定鉛絲實現機器魚的配重,防止機器魚發生縱傾、偏轉。頭部和中部組成空腔,空腔內放置控制系統硬件,如圖1。
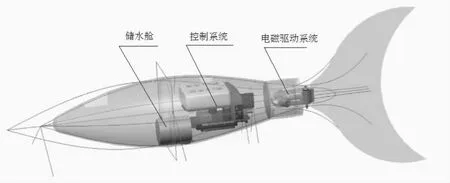
圖1 機器魚結構組成示意圖
2.2 儲水倉的設計和安裝
本文設計了一種可換氣圓柱狀儲水倉,如圖2 為儲水倉設計圖,在密封圓柱狀水倉的基礎上進行改進,通過上方開口與機器魚腔體內部空氣連通,實現氣體的交換,從而降低空氣壓縮比。

圖2 儲水倉設計圖
2.3 電磁驅動機器魚體積與配重
在Creo 中測量得機器魚外部總體積約為2480cm3。稱重得到各組成部件的重量和重心位置,如表1。

表1 機器魚組成部件的質量和重心位置
以魚體中心為坐標原點建立坐標軸,魚頭部所占的1/2 長度在x 軸的負半軸,后半段在x 軸的正半軸,建立二維平面坐標系,對加入配重后的機器魚整體重心位置進行分析。
根據力學知識可得機器魚的重心位置計算法為:
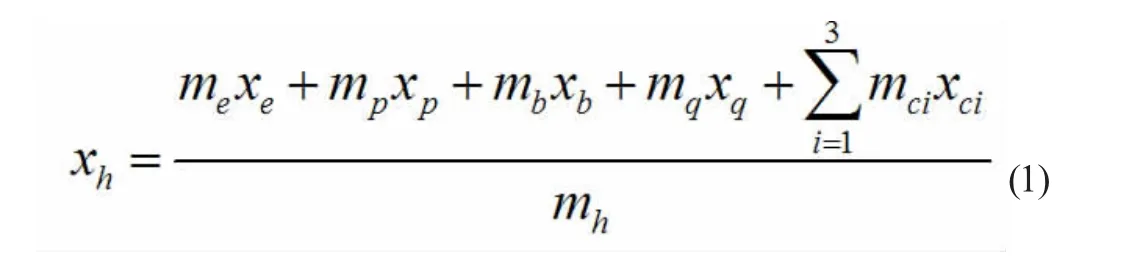

經計算分析得知機器魚重心得橫坐標值約為0,縱坐標為負值,機器魚總重量與排開水的重量相等,機器魚可在水中保持平衡。
3 電磁驅動機器魚上浮下潛的動力學分析
3.1 電磁驅動機器魚豎直方向受力分析
本節以機器魚下潛為例,研究在機器魚由水面初始位置豎直下潛到某一深度的過程中,該過程可分為三個階段:加速下潛階段、勻速下潛階段和減速下潛階段[5]。
由于在勻速下潛階段時,機器魚受到的重力、浮力、流體阻力[4],三力平衡,速度一定,加速度為0,所以本文從勻速階段開始入手研究。下式為機器魚下潛過程的合力表達式[8]:

式中:ΣF- 機器魚在豎直方向受到的合力;
G- 機器魚儲水倉進水后的重力;
Fb- 機器魚進入水中全排水受到的浮力;
f- 機器魚在下潛時受到的流體阻力。
3.2 電磁驅動機器魚下潛運動的仿真數值計算與分析
在研究機器魚浮潛的過程中,通過ANSYS Fluent 對機器魚下潛運動進行仿真[6],設定下潛速度求出機器魚受到的阻力,并在后處理模塊獲得流體及壓力云圖。
仿真結果分析:
表2 是得到的機器魚以不同速度下潛受到的阻力值。
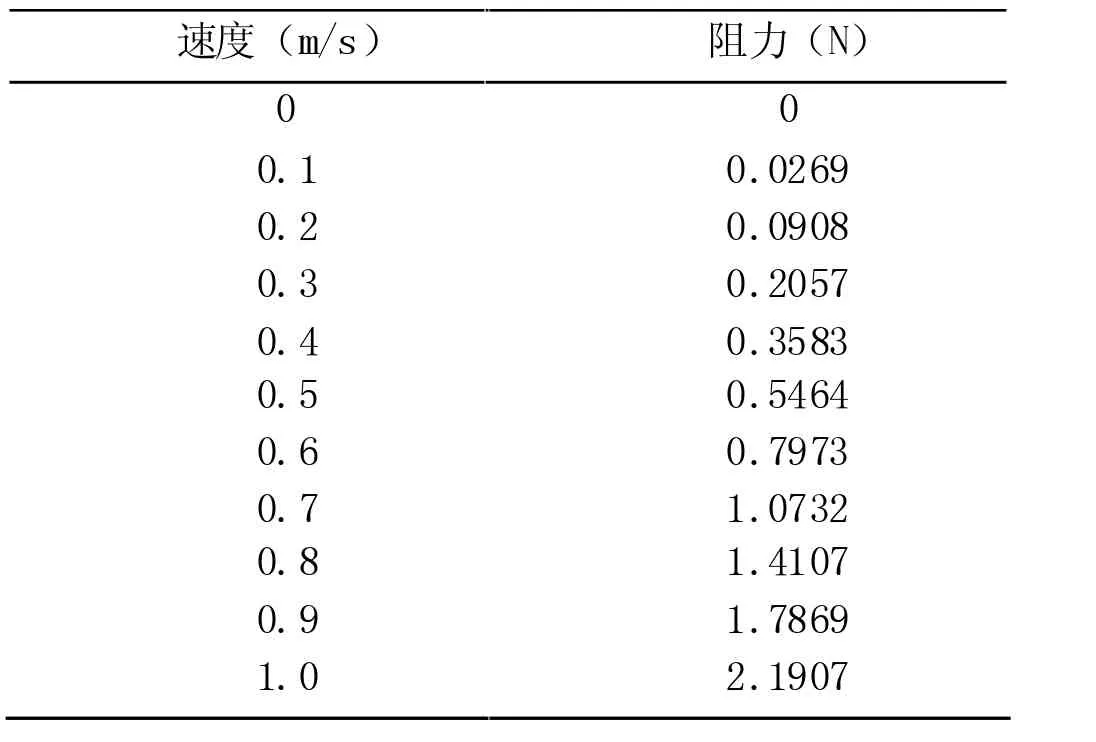
表2 仿真數據結果
使用MATLAB 中的擬合工具,對表中的數據擬合,擬合之后得到曲線方程[7]表示為:機器魚在下潛過程中,下潛速度越大,受到的阻力也越大。使用后處理模塊Result,得到機器魚勻速下潛過程中魚體周圍流場壓力云圖3。
由圖3 可知,機器魚下潛時受力較為均衡,魚體底部受到的壓力最大。
4 電磁驅動機器魚浮潛控制系統的研究
4.1 電磁驅動機器魚浮潛控制系統的總體設計
浮潛控制系統主要由Arduino uno、L298N、水泵(電機)、儲水艙、24V 電池、藍牙模塊組成。
4.2 控制系統硬件功能實現
本節設計了上浮下潛的控制系統。浮潛控制系統工作情況如下:電池通過L298N 模塊給水泵供電,L298N 給Arduino 板供電,當藍牙模塊接收到指令,信號傳輸到Arduino 板,Arduino 開始通過端口將信號傳到L298N 模塊上,L298N 模塊根據收到的信號給水泵(電機)供電,實現正轉或反轉,并可通過PWM進行調速。
5 電磁驅動機器魚上浮下潛運動實驗
5.1 浮潛控制系統實驗
5.1.1 實驗目的:檢驗水泵吸水和排水的穩定性;測試通過PWM對水泵流速進行調節。
5.1.2 實驗過程:通過設定脈寬占空比,分別設定水泵抽水流速為2ml/s、4ml/s、8ml/s,在不同時刻記錄重量。
圖4 為三組實驗數據擬合線圖。
5.1.3 實驗結論:水泵工作穩定。通過設定脈寬占空比調節流速,設定值越大,流速越快。
5.2 機器魚水中上浮下潛實驗
5.2.1 實驗目的:通過控制系統,完成機器在水中的下潛運動。
5.2.2 實驗過程與數據記錄:在Arduino 中傳入編譯的程序,進行信號調試后,對機器魚進行整體裝配。
通過藍牙控制機器魚的下潛運動。圖5 為機器魚在魚缸中的下潛實驗過程,分別為初始狀態(a),下潛狀態(b)和停止狀態(c)。

圖5 機器魚下潛過程圖
進行水泵吸水實驗,記錄機器魚加速下潛到0.4 米水深所需時間。結果如表3。

表3 吸水量與下潛時間記錄值
進行水泵排水實驗,記錄機器魚在0.4 米水底上浮到達水面時間。結果如表4。

表4 排水量與上浮時間記錄值
5.2.3 實驗結論:本節設計的浮潛控制系統可以實現機器魚的浮潛運動。隨儲水倉進、排水量的增大,機器魚浮潛運動時間縮短。
6 結論
本文以實驗室的單關節電磁驅動機器魚作為研究對象,研究電磁驅動機器魚上浮下潛功能的實現。主要工作如下:(1)提出基于儲水倉法的機器魚上浮下潛的方法。(2)對機器魚浮潛進行動力學分析與仿真數值計算與分析。(3)設計完成機器魚浮潛控制系統。(4)進行控制系統調試實驗與機器魚水中下潛實驗。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55