基于T- S 模糊時滯廣義系統的滑模控制
2022-01-14 08:02:32張政
科學技術創新 2021年35期
張政
(東北大學,遼寧沈陽 110819)
近年來,T-S 模糊系統在各行各業應用廣泛[1-2]。T-S 模糊模型是由一系列if-then 規則描述的非線性模型,任意光滑非線性系統都能由無常數項的T-S 模糊模型以任意指定精度逼近得到[3-4]。到目前為止,Chadli 等人[5]針對不確定連續T-S 模糊廣義系統的魯棒穩定性問題,給出了嚴格LMIs 穩定性充分條件。時滯是引起系統故障,導致動態系統不穩定且性能差的一個重要原因,在許多實際系統中經常存在,Li Wenxin 等人[6]利用新型積分不等式給出了具有時滯的T-S 模糊廣義系統容許性的充分判據。Zhu Baoyan 等人[7]基于T-S 模糊模型,針對廣義系統提出了具有L-2 擾動的耗散控制方法。Li Rongchang 等人[8]設計積分型切換函數對一類T-S 模糊廣義系統的滑模控制器故障檢測問題進行研究。基于T-S 模糊方法,Zhang Di 等人[9]針對非線性馬爾科夫跳變系統進行滑模控制并為其設計滑模控制器。Li Jinghao 等人[10]基于超扭轉算法,針對馬爾科夫跳變T-S 模糊廣義系統提出了積分滑模控制方案。
本文將基于T-S 模糊方法,研究廣義系統的滑模控制問題。首先定義廣義模糊系統穩定性、無脈沖和正則性。然后設計積分型滑模面函數,得到等效控制律ueq使系統軌跡維持在滑模面上。給出了時滯系統容許的LMI 判據。最后設計滑模控制器,驅動系統在有限時間內到達滑模面。
1 系統描述



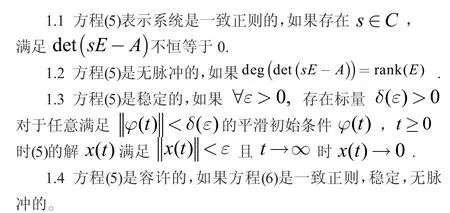
2 主要結果
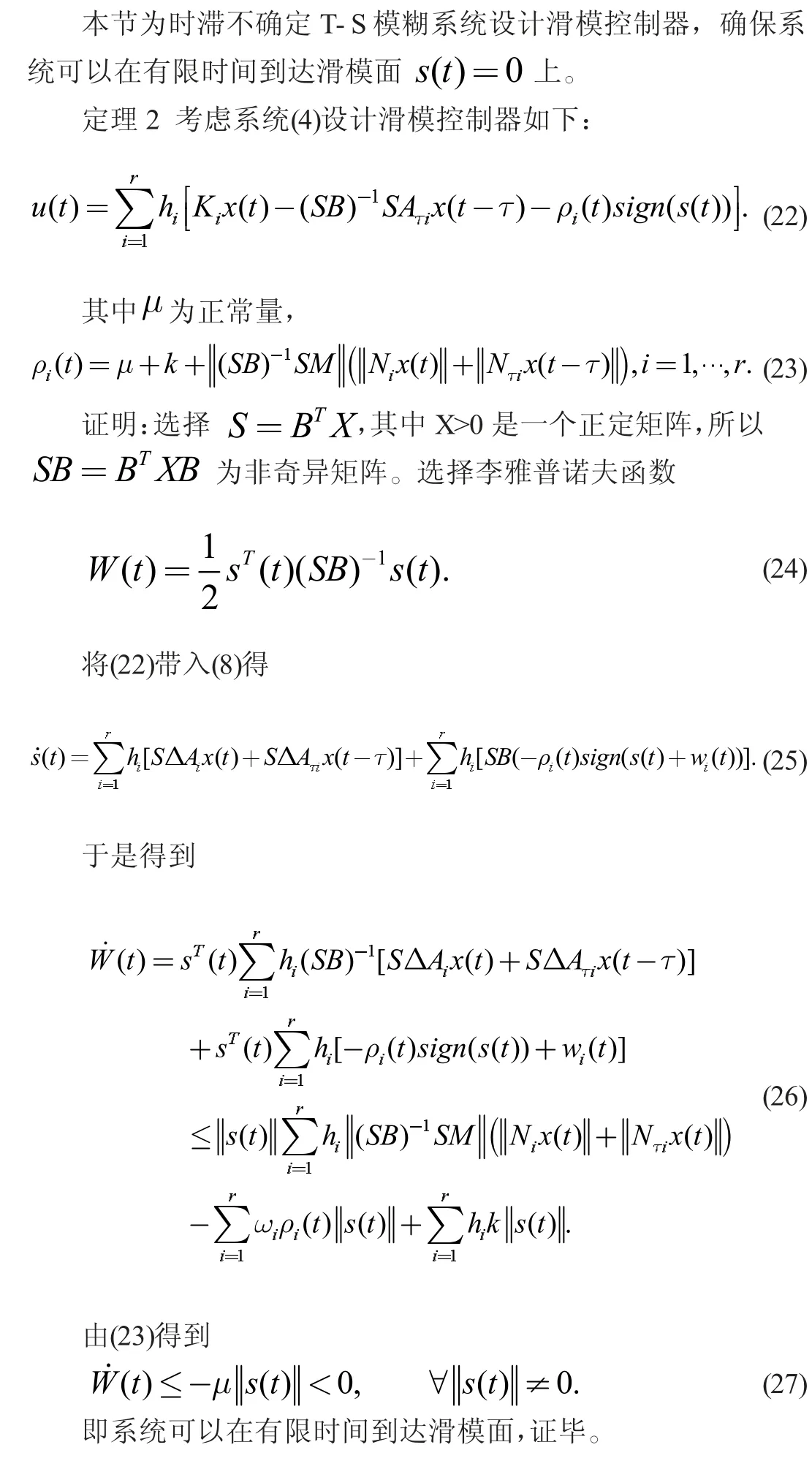
本節為系統(4)設計滑模控制器,給出閉環系統在所有允許的不確定性和外部干擾下容許的充分判據。滑模控制器的設計分為兩步:(1)設計積分型滑模面函數,使系統軌跡維持在滑模面 s (t)=0 上。 基于 Lyapunov 穩定性理論, 構造Lyapunov-Krasovskii 泛函從而證明系統的容許性。(2)設計滑模控制器保證系統在有限時間到達滑模面。
2.1 滑模面函數設計
設計積分型滑模面函數如下:

2.2 系統滑模的容許性分析


2.3 滑模控制器設計
3 結論
本文研究了帶有不確定的T-S 模糊廣義時滯系統的滑模控制問題。首先,設計積分型滑模面函數,保證等效控制律使系統穩定在s(t)=0 滑模面上。然后,根據Lyapunov 穩定性理論,統給出滑模系容許性的充分判據。最后,設計滑模控制器保證系統在有限時間到達滑模面。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16