無軸傳動系統多電機同步控制方法研究
2022-01-12 11:57:34梁定軍
工程技術與管理 2021年23期
關鍵詞:控制策略
梁定軍
廣東美的白色家電技術創新中心有限公司,中國·廣東 佛山 528311
1 引言
隨著民眾生活水平不斷提升,對商品精美性的要求也隨之提升。由此,印刷行業在此背景影響下,結合現代計算機技術、信息技術等提出無軸印刷技術,并以此取代長軸印刷技術。所謂無軸印刷僅是至設備內部每個機組均處于獨立狀態,在運動控制器的指令控制下由單獨的伺服電動機驅動,進而使得各機組之間呈現出同步運轉。
2 無軸傳動同步控制系統概述
2.1 無軸傳動原理
在一段時間內,機械傳動一種占據傳動控制系統的主流地位,該形式在實際應用過程中主要由主電機負責驅動各傳統軸,利用齒輪機構、聯軸器等機械構件為設備內的傳動軸輸出動力,主軸部件則負責向各個從動單元分配扭矩,機械式變速器對傳動軸速度進行控制。該模式的優勢在于各個傳動軸之間位置以及速度同步性較好,出現同步相位偏差的概率相對較小。但是隨著印刷對控制精度、實時控制等要求的不斷提升,機械傳動的弊端逐漸出現,并被無軸傳動所取代。
在無軸傳動系統中,純機械傳動結構被取消,各機組由專門的電機負責驅動,整體同步控制方面則通過軟件算法集合硬件級聯達成。無軸傳動系統在實際應用過程中通過通知起發送的信號對各伺服系統進行控制,進而達成設備內各機組同步運轉的目的。從本質層面分析,無軸傳動技術屬于一種綜合性傳動技術,其實際應用中結合了電子凸輪、電子齒輪、自動控制技術等多種技術。其主要結構如圖1所示[1]。

圖1 無軸傳動系統結構示意圖
2.2 同步控制原理
在無軸傳動系統設計中,要求各機組達成同步要求,但是考慮到交流伺服電機具備較強的非線性以及強耦合性特征,使得該系統成為非線性、強耦合、實變的多輸入多輸出系統。通過對相關研究進行整合可知,其主要性能指標要求具備速度以及位置同步。為達成此指標要求,需要控制設備內各電機軸依照一定的速度或是位置進行同步運轉。其中,同步關系是受各個受控量應滿足某種線性或非線性函數關系,具體如下所示:


為比例系數,在設備被各電機同步比例系數取值為1的條件下,是最簡單的同步關系。當同步比例系數如下式情況時,則可認定為比例同步。

所謂多電機同步運轉即是指在各電機在速度或位置在瞬態或穩態條件下保持同步運轉。在系統實際運行過程中,受靜態負載波動、外部環境變化等情況下,不可避免地會導致電機傳動速度出現偏差,進而導致不同步問題出現。由此,在實際對系統進行設計過程中,需要對電機速度進行相應調整,以降低出現同步誤差的幾率。然而,從實際發展情況分析,僅靠伺服驅動系統的內部調控很難實現確保電機同步性的目的。因此,要使系統中的多個電機能夠按給定的指標進行同步運行,就必須選用合適而可靠的同步控制策略及控制算法。通過軟件算法來模擬各軸之間的傳動關系并對各個軸輸入量進行實時調節,從而克服系統中導致不同步的干擾因素,實現多電機的實時同步運行。
3 無軸傳動多電機同步控制策略
電子虛擬總軸控制策略在是一種模擬機械傳動形式的策略。在該模式中,利用電子總軸作為傳動動作的主導地位,其他各機組在實際運轉過程中跟隨電子總軸進行運動,各機組以及電子長軸的耦合利用轉矩綜合以及反饋實現。其具體結構如圖2所示。虛擬的電子總軸是單一的速度調節,它為從屬軸提供速度和位置參考值。穩態時,各個軸跟隨電子總軸,能夠達到很好的同步效果。當一個軸受到干擾或者由于某些原因偏離給定值時,通過轉矩的綜合和反饋,使電子總軸感受到這種變動,從而迫使其他軸跟隨這種變動,實現了在瞬態時各個軸的同步運動[2]。

圖2 電子虛擬總軸控制結構框圖
3.1 參數設置
相較機械傳動結構,電子虛擬總軸的優勢在于控制器參數可以靈活調整,同時實際運行過程中無阻尼消耗。因此,在實際應用過程需要對其參數進行調整,以確保其無震蕩、快速響應,并具備較強的動態剛度,為各軸同步運轉提供基本條件支持。在實際進行參數設置過程中主要分為虛擬總軸設置以及從軸控制器參數設置兩方面。
針對從軸控制器參數設置方面,設計者需要依據實際需求的動態響應對阻尼以及剛度進行設置,具體設置原則為系統具備良好的動態響應性能,運行過程中不出現振蕩情況,同時具備較強的動態剛度。在實際調整過程中需要認識到對阻尼以及剛度進行調整,分別可以達成獲取較好動態相應以及增強系統動態剛度的效果。
3.2 仿真分析
由圖2所示的電子虛擬總軸結構框圖可知,該策略可以實現擴展至任意多軸的目的。由此,論文研究中以兩軸系統為例進行仿真實驗。
本次試驗過程中假設無擾動狀態,在兩軸中分別選取不同的轉動慣量,其中以及分別設定為0.3kg/m2以及0.1kg/m2,以此實現驗證控制策略同步性能的目的。本次試驗中涉及的仿真參數包括,其數值分別設計為、30、20、15、10。
電子虛擬總軸控制策略的虛擬主軸是單一的速度調節。因此,在關心速度偏差和位置偏差的同時,也需要對兩軸的速度響應情況進行測定。由仿真測試結果可知,在系統不受負載擾動影響的情況下,各軸在經過調整后,其速度相應可以達到跟蹤電子總軸速度給定的目的,進而達成消除偏差的目標。
在對其進行具體分析后,可得出如圖3、圖4所示結果。由圖中的信息可知,即使無擾動影響,各軸參數依然存在一定差異,但是在電子虛擬總軸的作用下,利用轉矩綜合以及反饋可以有效實現在短時間內消除偏差,最終達成同步控制目標。
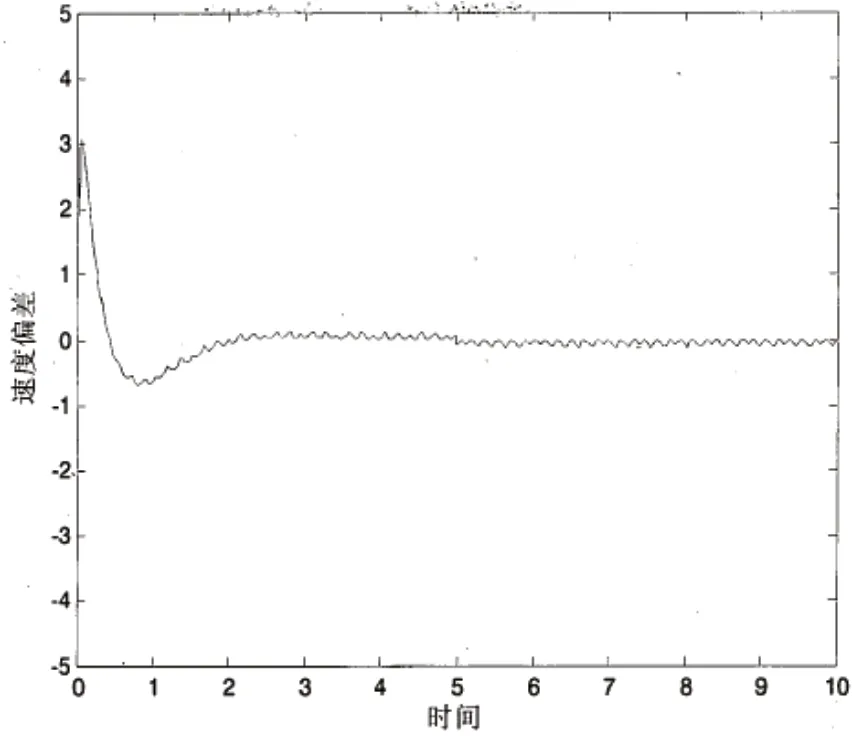
圖3 速度偏差
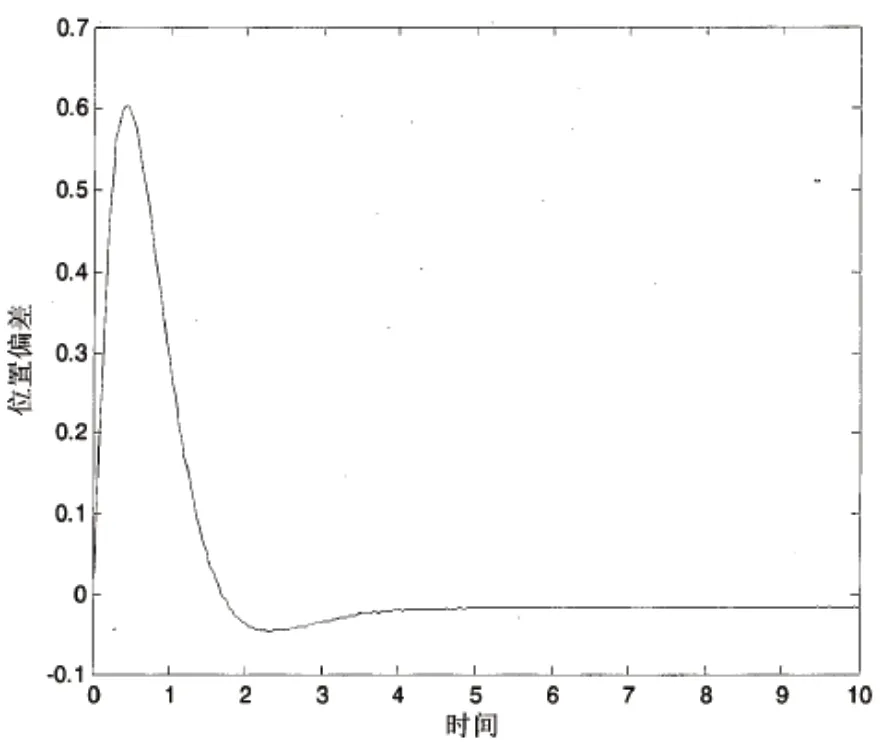
圖4 位置偏差
4 結語
綜上所述,在當前時代背景下,無軸傳動技術已經取代以往機械長軸傳動技術的地位。針對當前控制不同步問題,論文以電子虛擬長軸作為解決方案,并進行深入研究。最終仿真結果可知,該技術可以有效消除偏差,進而達成多電機控制同步的目的。由此,此方面具備一定應用價值[3]。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36