基于物聯(lián)網(wǎng)技術(shù)的分體式多功能醫(yī)用機器人的設(shè)計
2022-01-10 06:56:16王肖文唐健豪陳旭創(chuàng)
醫(yī)療裝備 2021年23期
關(guān)鍵詞:示意圖
王肖文,唐健豪,陳旭創(chuàng)
佛山市第一人民醫(yī)院設(shè)備科 (廣東佛山 528000)
近年來,2019新型冠狀病毒、埃博拉病毒及各類流感病毒等在世界范圍內(nèi)持續(xù)多點暴發(fā),對全世界人民的生命健康、經(jīng)濟發(fā)展及社會穩(wěn)定均造成了巨大的威脅。以往為預(yù)防院內(nèi)感染,各級醫(yī)院通常采用人工作業(yè)的方式開展消毒工作,但該方式具有耗費人力、無法徹底阻斷病毒傳播等缺點。因此,各種醫(yī)用機器人應(yīng)運而生,并被廣泛應(yīng)用于藥物配送、護(hù)理、消毒等臨床工作中[1-2]。機器人具有實用性、多樣性和高效性等優(yōu)點,將其應(yīng)用于醫(yī)院中可滿足降低職業(yè)暴露風(fēng)險、避免感染傳播的迫切需求。但現(xiàn)有醫(yī)用機器人的種類繁多,且大多采取的是一體式設(shè)計,如醫(yī)用消毒機器人[3]、藥物配送機器人、護(hù)理機器人等,具有體積龐大、功能單一、應(yīng)用場景固定等缺點。此外,對于工作時間分散的多臺機器人,每臺機器人均需配備單獨的導(dǎo)航盒和主控底盤,增加了使用成本,無法很好地滿足醫(yī)院臨床工作的需求。因此,實現(xiàn)醫(yī)用機器人的分體式和多功能十分必要。
物聯(lián)網(wǎng)藍(lán)牙信號到達(dá)角度(angle of arrival,AOA)定位技術(shù)是一種新型的室內(nèi)導(dǎo)航技術(shù),可實現(xiàn)分體式多功能醫(yī)用機器人在室內(nèi)行駛時的精確定位。STM32機器人主控底盤是分體式多功能醫(yī)用機器人行駛的主要驅(qū)動部件,可實現(xiàn)分體式多功能醫(yī)用機器人的行駛和避障功能。計劃式導(dǎo)航盒是分體式多功能醫(yī)用機器人的任務(wù)中心,使用者可通過其向分體式多功能醫(yī)用機器人下達(dá)各種任務(wù)指令[4-5]。基于此,本研究基于物聯(lián)網(wǎng)藍(lán)牙AOA 技術(shù)、STM32機器人主控底盤及計劃式導(dǎo)航盒[6-7]設(shè)計了一種新型的分體式多功能醫(yī)用機器人,該機器人可自由裝配消毒、運送、場景隔離等擴展模塊,滿足多場景應(yīng)用的需求,具有功能多樣、使用成本較低等優(yōu)點。
1 設(shè)計思路
分體式多功能醫(yī)用機器人的設(shè)計思路見圖1。首先,計劃式導(dǎo)航盒與藍(lán)牙AOA 基站進(jìn)行通信,隨后,服務(wù)器通過藍(lán)牙AOA 基站提供的信息計算得到機器人的位置信息,并將位置信息反饋至計劃式導(dǎo)航盒,計劃式導(dǎo)航盒再通過通信藍(lán)牙向STM32機器人底盤發(fā)送任務(wù),從而使機器人按計劃完成任務(wù)[8-9]。
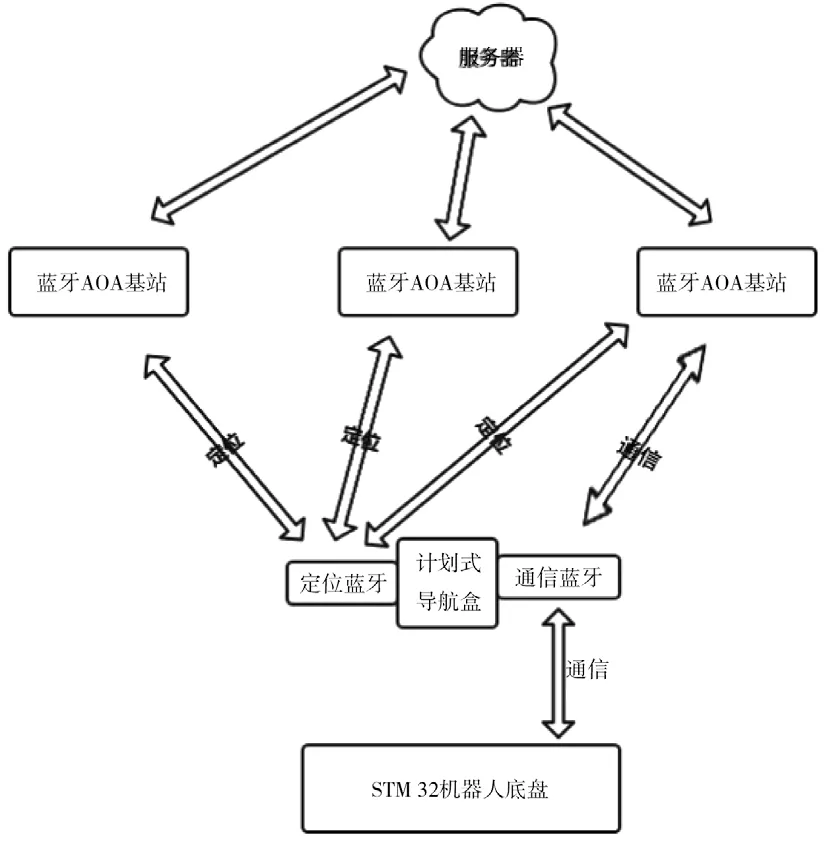
圖1 分體式多功能醫(yī)用機器人設(shè)計思路
2 基本構(gòu)成
2.1 硬件系統(tǒng)
2.1.1 STM32機器人底盤主控模塊
STM32機器人底盤主控模塊由TOF 激光避障模塊、懸崖防跌模塊、多功能模塊連接槽、運動腳輪模塊、陀螺儀模塊、計劃式導(dǎo)航盒放置槽組成。主控底盤通過STM32芯片模塊對采集到的運行數(shù)據(jù)、定位數(shù)據(jù)、狀態(tài)參數(shù)指標(biāo)進(jìn)行客觀量化,與計劃式導(dǎo)航盒進(jìn)行數(shù)據(jù)交互,實現(xiàn)精準(zhǔn)導(dǎo)航。陀螺儀用于修正慣性軌跡,TOF 激光避障及懸崖防跌模塊用于修正行駛軌跡。建立以全自主定位導(dǎo)航技術(shù)[10-11]為基礎(chǔ)的分體式多功能醫(yī)用機器人底盤主控模塊,可以兼容不同的設(shè)備,使不同設(shè)備擁有自主行走、智能避障、定位導(dǎo)航控制功能。STM32機器人底盤主控模塊示意圖見圖2。
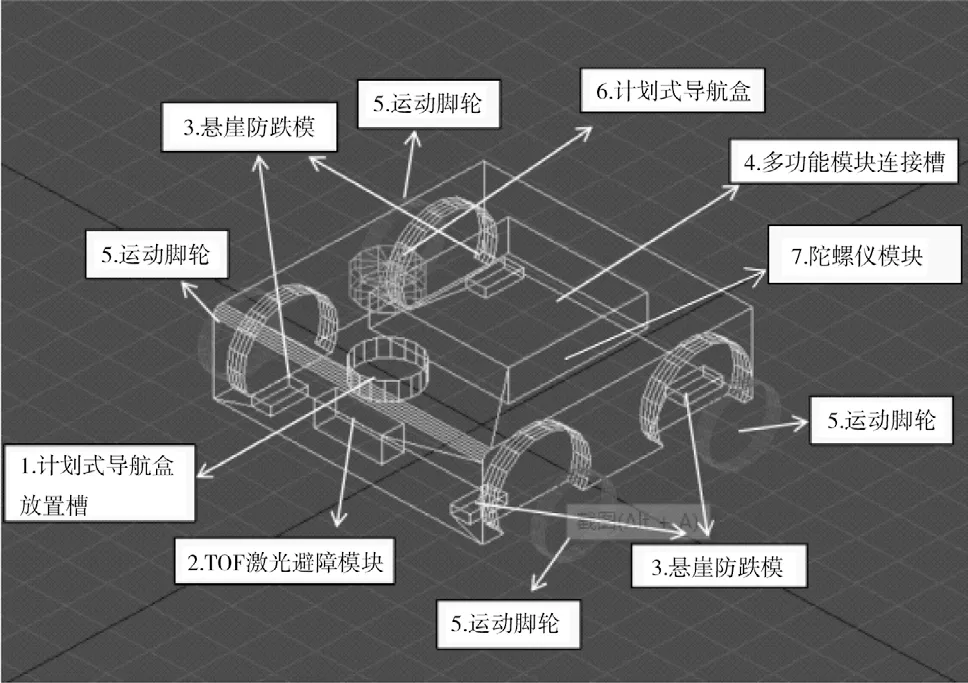
圖2 STM32機器人底盤主控模塊示意圖
2.1.2 計劃式導(dǎo)航盒
計劃式導(dǎo)航盒的核心為LINUX 內(nèi)核板,還包含狀態(tài)顯示屏、藍(lán)牙模塊、電池模塊及無線充電模塊。LINUX 內(nèi)核板通過藍(lán)牙模塊與任務(wù)服務(wù)器端通信獲取任務(wù),并通過狀態(tài)顯示屏模塊顯示狀態(tài)信息。計劃式導(dǎo)航盒示意圖見圖3。
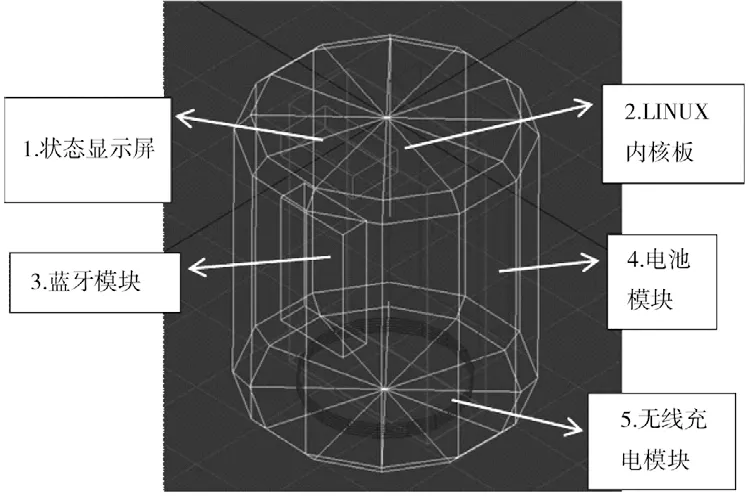
圖3 計劃式導(dǎo)航盒示意圖
2.1.3 擴展模塊
擴展模塊主要包括紫外線消毒燈、空氣消毒機、藥物運送箱、治療車、機器手臂、噴霧消毒車等,可滿足多場景應(yīng)用的需求。
2.2 軟件系統(tǒng)
軟件系統(tǒng)主要包括LINUX 計劃式導(dǎo)航盒多任務(wù)操作系統(tǒng)、STM32機器人底盤實時系統(tǒng)。
LINUX 計劃式導(dǎo)航盒使用ROS 的rizv 軟件實現(xiàn)三維可視化,一方面可圖形化顯示外部地圖信息,另一方面可向?qū)Ш胶邪l(fā)送控制命令,從而實現(xiàn)對機器人的監(jiān)測與控制。STM32機器人底盤實時系統(tǒng)使用FreeRTOS 作為實時操作系統(tǒng)內(nèi)核。操作系統(tǒng)功能包括任務(wù)管理、時間管理、消息隊列管理、內(nèi)存管理、記錄功能、軟件定時器等,可協(xié)調(diào)機器人底盤系統(tǒng)的運動。
3 主要功能
該研究設(shè)計的分體式多功能醫(yī)用機器人,以物聯(lián)網(wǎng)為載體,結(jié)合了藍(lán)牙AOA 定位技術(shù),具有分體式、多功能和精準(zhǔn)定位導(dǎo)航的功能。物聯(lián)網(wǎng)多功能模塊包括硬件(各種藍(lán)牙部件)、硬件平臺、軟件平臺及無線傳感器網(wǎng)絡(luò)。硬件平臺使用LINUX-ARM 架構(gòu),軟件平臺基于LINUX,使用藍(lán)牙AOA 定位技術(shù)和藍(lán)牙通信技術(shù),采集機器人主控底盤和計劃式導(dǎo)航盒在實時行駛中的行駛數(shù)據(jù)和位置信息,結(jié)合藍(lán)牙網(wǎng)關(guān)將位置信息回傳至導(dǎo)航盒,實現(xiàn)對多個機器人主控底盤和計劃式導(dǎo)航盒的信息連接和交互。
3.1 機器人主控底盤
基于STM32芯片的機器人主控底盤通過藍(lán)牙連接模塊讀取計劃式導(dǎo)航盒的驅(qū)動參數(shù),如讀取陀螺儀模塊參數(shù)進(jìn)行方向判斷并輸出PWM 信號至運動腳輪模塊驅(qū)動電機,控制電機進(jìn)行前進(jìn)、后退、左轉(zhuǎn)和右轉(zhuǎn);運動過程中主控底盤不間斷讀取超聲防撞模塊、TOF 激光避障模塊、懸崖防跌模塊和電機驅(qū)動模塊的數(shù)據(jù)作為反饋信號。當(dāng)機器人遇到障礙物時,TOF 激光避障模塊和超聲防撞模塊的反饋信號促使主控底盤通過藍(lán)牙透傳至計劃式導(dǎo)航盒使電機停止并調(diào)整方向。當(dāng)機器人遇到落差較大的地面時,懸崖防跌模塊的反饋信號促使主控底盤通過藍(lán)牙透傳至計劃式導(dǎo)航盒使電機停止并調(diào)整方向。STM32機器人主控底盤模塊工作流程示意圖見圖4。
3.2 計劃式導(dǎo)航盒
導(dǎo)航盒的LINUX 主控板通過藍(lán)牙通信模塊與任務(wù)服務(wù)器端通信獲取任務(wù),并通過狀態(tài)顯示屏顯示獲取的狀態(tài)信息。導(dǎo)航盒的藍(lán)牙定位模塊與藍(lán)牙基站進(jìn)行通信,經(jīng)過藍(lán)牙基站將導(dǎo)航盒的位置信號發(fā)送到任務(wù)服務(wù)器主機,經(jīng)過服務(wù)器主機處理運算位置信息后,將位置信息經(jīng)過藍(lán)牙基站回傳到導(dǎo)航盒。
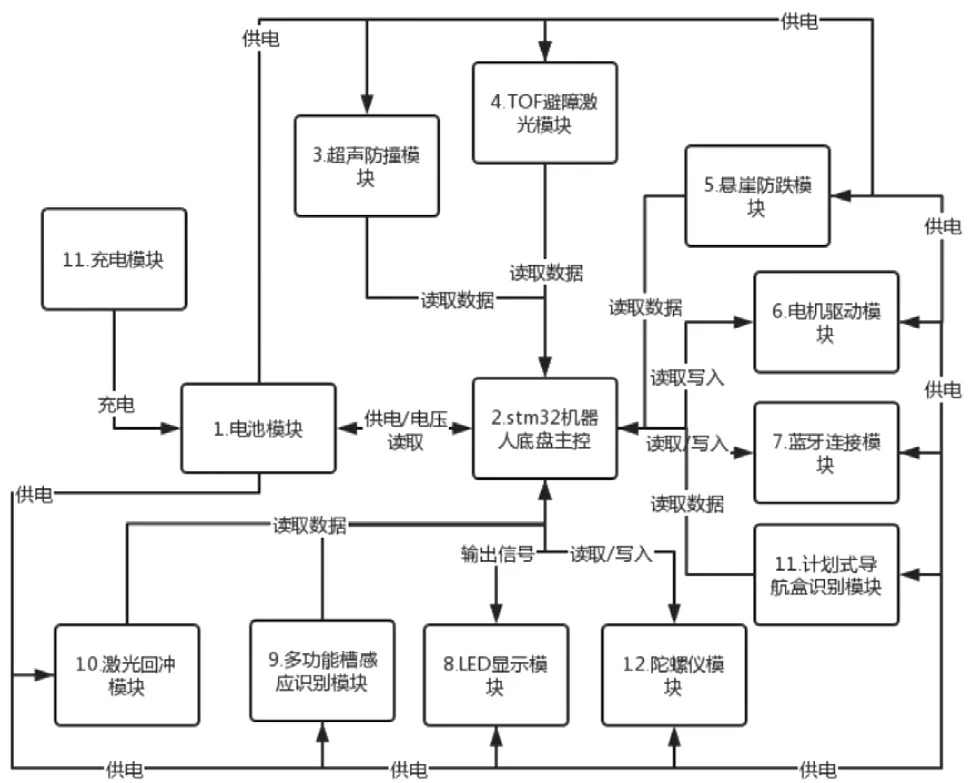
圖4 STM32機器人主控底盤模塊工作流程示意圖
導(dǎo)航盒讀取一系列位置信息后,LINUX 主控板模塊將方向信息通過藍(lán)牙通信模塊傳送至機器人底盤,由STM32主控底盤完成導(dǎo)航任務(wù)。計劃式導(dǎo)航盒模塊示意圖見圖5。

圖5 計劃式導(dǎo)航盒工作流程示意圖
4 小結(jié)
本研究設(shè)計的分體式多功能醫(yī)用機器人,以物聯(lián)網(wǎng)為載體,結(jié)合藍(lán)牙AOA 定位技術(shù),具有分體式、多功能和精準(zhǔn)定位導(dǎo)航的功能,且造價低、容易維護(hù)[12]。系統(tǒng)將機器人的各部分功能模塊化,實現(xiàn)多功能擴展模塊的自由裝配,如紫外線消毒燈、空氣消毒機、藥物運送箱、治療車、機器手臂、噴霧消毒等。這種按需自由裝配為不同用戶提供個性化定制,可滿足多場景應(yīng)用的需求,節(jié)約了成本、機器人的存儲空間,并提高了機器人的使用率。
在人工智能、物聯(lián)網(wǎng)技術(shù)、5G 網(wǎng)絡(luò)技術(shù)飛速發(fā)展的背景下,機器人技術(shù)的研究和應(yīng)用從傳統(tǒng)的工業(yè)領(lǐng)域快速擴展到醫(yī)療領(lǐng)域,應(yīng)用的專業(yè)化、多樣化使醫(yī)用機器人勢必成為醫(yī)療衛(wèi)生事業(yè)發(fā)展的大趨勢,無論在重大公共衛(wèi)生事件還是在應(yīng)急救援等處理過程中都離不開醫(yī)用機器人。本研究設(shè)計的新一代分布式多功能醫(yī)用機器人必將造福人類,為人類健康事業(yè)貢獻(xiàn)更多力量。
猜你喜歡
《學(xué)習(xí)方法報》歷史中考版(2023年21期)2023-11-09 07:40:38
數(shù)學(xué)小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
當(dāng)代貴州(2019年41期)2019-12-13 09:28:56
娃娃樂園·3-7歲綜合智能(2016年1期)2016-10-25 09:32:48
中國共青團(tuán)(2015年7期)2015-12-17 01:24:38
中學(xué)生數(shù)理化·八年級物理人教版(2014年1期)2015-01-09 08:50:45
中國扶貧(2014年8期)2014-06-27 15:33:39
中國扶貧(2014年8期)2014-06-27 04:09:02
中學(xué)生數(shù)理化·八年級物理人教版(2014年2期)2014-04-02 08:50:44
能源(2014年3期)2014-03-27 09:55:20
