基于參數分層辨識的RMA-UKF算法SOC估計
2022-01-07 07:41:10寇發榮王甜甜王思俊
電池 2021年6期
關鍵詞:模型
寇發榮,王甜甜,王思俊,門 浩
(西安科技大學機械工程學院,陜西 西安 710054)
以電池模型為基礎的參數辨識是荷電狀態(SOC)估計的前提[1]。H.Rahimi-Eichi等[2]提出一種可變窗口的最小二乘法,利用可變窗口特點截取工況信息,以實現參數辨識和SOC估計;朱瑞等[3]提出分布式最小二乘法的鋰離子電池建模及參數辨識。這些方法雖然能實現電池參數的在線辨識,但未考慮模型參數之間存在相互干擾的問題,使辨識的模型參數魯棒性欠佳。針對噪聲干擾下SOC估計精度不足的問題,F.F.Yang等[4]用長短時記憶神經網絡和無跡卡爾曼濾波(UKF)聯合進行SOC估計;M.M.Zeng等[5]使用模糊控制與UKF聯合進行SOC和健康狀態(SOH)估計;丁潔等[6]提出加權多新息無窮濾波算法進行鋰離子電池SOC估計。以上估計均使用σ點集來逼近具有附加高斯噪聲的非線性系統,當觀測噪聲中有污染時,性能將嚴重退化,使估計結果失真。
本文作者從提高模型參數辨識精度和噪聲干擾下SOC估計精度兩方面進行分析,提出參數分層辨識架構和魯棒似然估計的自適應無跡卡爾曼濾波(RMA-UKF)算法,聯合進行SOC估計,并使用半實物仿真系統,對噪聲干擾下的鋰離子電池模型SOC估計算法進行準確性驗證。
1 模型建立及參數辨識
1.1 二階RC模型
等效電路模型的準確建立是SOC估計的第一步。二階RC等效模型是較好的電池估算模型,同時考慮了電池的瞬態和穩態特性,如圖1所示。
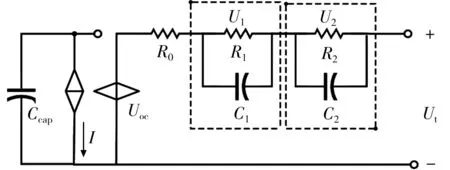
圖1 二階RC模型Fig.1 Second-order RCmodel
圖1中:R0為歐姆內阻;R1、R2分別為電化學和濃差極化電阻;C1、C2分別為電化學和濃差極化電容;U1、U2分別為電化學和濃差極化電壓;Ut為端電壓;Ccap為電池容量;Uoc為開路電壓(OCV);I為電流。該等效電路模型的方程為:
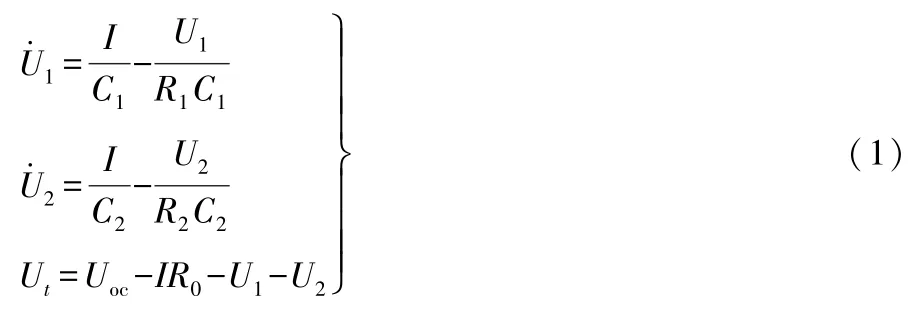
式(1)中:1和2為RC并聯環節的電壓降。
1.2 開路電壓辨識
采用ITS5300型動力電池測試系統(南京產)進行實驗。實驗對象為18650型鋰離子電池(松下公司),正極活性材料為鈷酸鋰,標稱容量為32 Ah,工作電壓為2.7~4.2V。
電池在開路狀態下的端電壓為OCV,選用靜置法離線測得。受RC慣性環節的影響,在線辨識測得的是端電壓。
OCV-SOC的標定:以1/3C恒流放電,每次放出5%的最大可用容量,靜置1 h,可得到OCV,不斷循環,直到電壓降至2.7V。使用Lsqcurvefit函數擬合OCV與SOC的關系,得到:

式(2)中:Soc為電池的SOC。
1.3 阻容參數分層辨識
傳統參數辨識采用單一的離線辨識方法,在辨識過程中,因極化參數變化較大,導致辨識準確性較低。為了提高參數辨識精度,實驗提出阻容參數分層辨識框架,將R0和極化參數分開辨識,不僅可提高辨識精度,還能降低矩陣計算維度。由于R0與電池自身特性有關,采用混合功率脈沖特性(HPPC)實驗對參數R0進行辨識,并通過多項式擬合;極化阻抗是由于電池的電化學反應引起內阻值的變化,具有時變特性,采用帶遺忘因子的偏差補償遞推最小二乘法(FFBCRLS)實現極化參數的辨識。
1.3.1 歐姆內阻特性辨識
由HPPC特性實驗對R0進行離線辨識,一般用兩段的平均值來表示歐姆值。R0為突變的壓降除以放電電流,即:

式(3)中:Ua、Ub、Uc和Ud分別為HPPC實驗前靜置平衡點處的電壓、放電瞬間下跌電壓、放電10 s后電壓及放電結束后的回彈電壓。
通過MATLAB中的cftool工具箱對R0擬合,得到:

1.3.2 極化參數在線辨識
考慮到極化參數的時變性,采用FF-BCRLS對極化參數進行辨識。電池系統簡化成I為輸入、Ut為輸出的單輸入輸出系統。分析電池模型,建立并求解系統的狀態方程,進而推導出等效電路模型的R1、R2和C1、C2等參數。
將式(1)所示的離散狀態空間方程化為差分方程形式:

式(5)中:下標k表示當前時刻,下標k-1表示前一時刻,下標k-2表示前兩時刻;a i(i=1、2、3、4)為常系數;I和y分別為系統的輸入和輸出矩陣。

式(6)中:h和θ分別為系統的數據矩陣和參數矩陣。

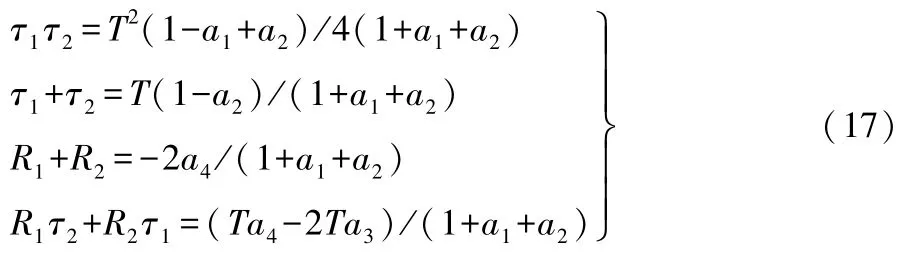
式(7)中的待定系數a1、a2、a3和a4為:
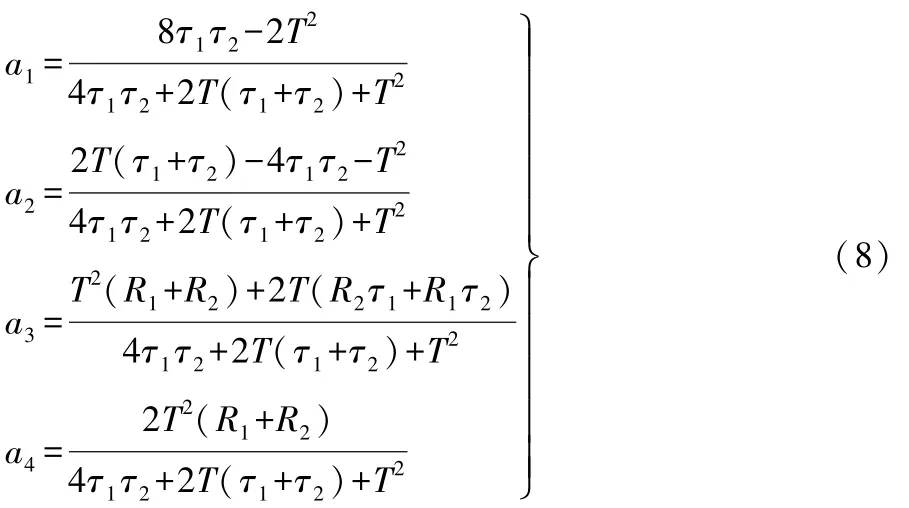
式(8)中:τ1和τ2分別電化學和濃差極化的時間常數;T為采樣時間間隔。
FF-BCRLS具體遞推過程如下:
①計算系統輸出y k和估計誤差e k

②計算增益矩陣K k

式(10)中:λ為遺忘因子;P為協方差矩陣。

④誤差函數J k計算

⑥更新協方差矩陣P和偏差補償估計值
最后,進行參數計算:
2 基于RMA-UKF算法的SOC估計
RMA-UKF算法在傳統UKF的基礎上,通過損失函數最小化來解決問題,得到修正因子來修正噪聲協方差矩陣,并利用量測數據過濾系統隨機噪聲,解決噪聲干擾問題,提高SOC估計精度。假定k時刻系統狀態量為x k,系統輸入為u k,系統觀測量為z k,以f(x k,z k)為系統狀態方程,h(x k,u k)為量測方程,得到系統空間方程:
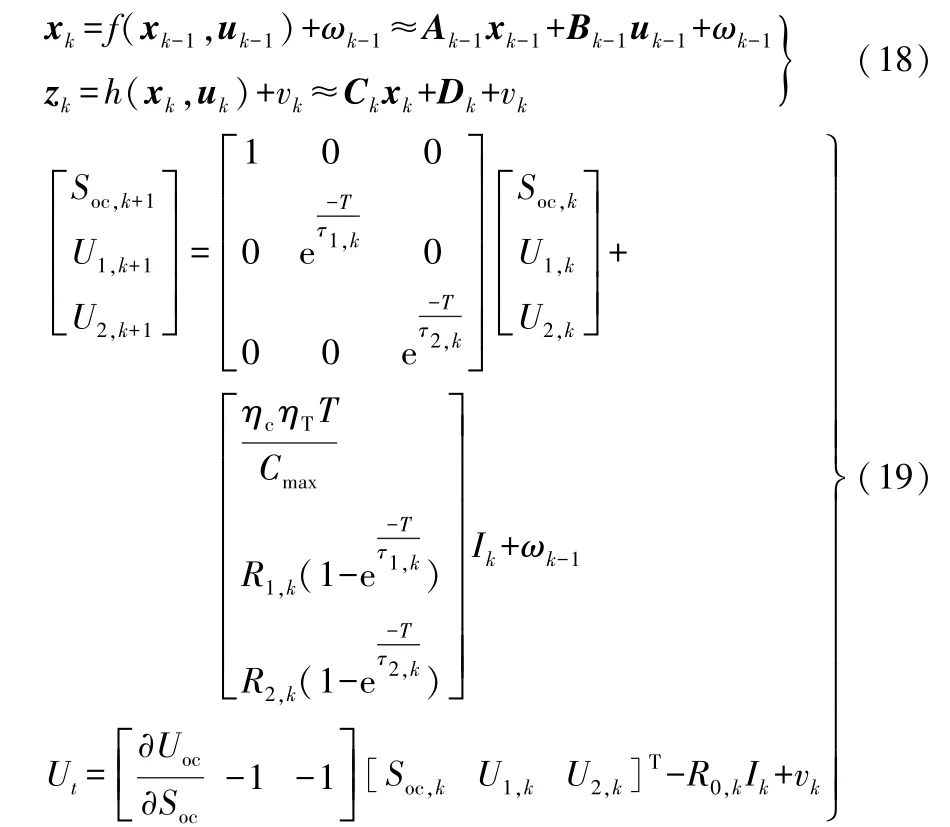
式(18)-(19)中:A為狀態轉移矩陣,用來聯系前后兩個時刻的系統狀態;B為輸入控制增益矩陣;C為量測矩陣;D為前饋矩陣;ηT為溫度修正系數,取值1;ηc為放電倍率的修正系數,實驗設定為0.97;Cmax為電池最大可用容量,取值為32 Ah;ω和υ分別為相互獨立的量測高斯白噪聲。
RMA-UKF通過修正因子修正噪聲協方差矩陣來實現系統的自適應性和容錯性。UKF算法可參考文獻[7];修正因子的推導如下。
由式(18)構建非線性回歸模型:


式(21)中:R k為UKF算法的觀測噪聲協方差矩陣。

定義損失函數J(x k):

函數?(ζ k)的表達式為:
式(24)中:β為回歸損失函數參數值,為了達到所需的估計精度,需要合理選擇,文獻[8]建議β取1.345。



由式(22)可得到環境ζ k,再對φ k作進一步展開:

實際上,真實狀態值不可知,代入的是外推估計值,從而ω k=0,因此有e k為υ k,定義
構造修正因子Ω:

通過修正因子對觀測噪聲協方差進行重構,得到修正后的協方差矩陣為:

由式(28)和(29)可知,修正因子Ω和φ k都是對觀測噪聲協方差矩陣進行修正,由式(30)可得:

式(31)中:λ k=1/γ k。
時間更新階段、量測更新階段,觀測預測值的計算與UKF算法相同,互協方差P zz,k/k-1以及濾波更新的公式為:
式(32)中:k/k-1代表k-1時刻到k時刻的值;j為狀態估計結果中第j個σ點。
3 實驗設計與結果分析
3.1 快速控制原型實驗設計
采用MicroAuto Box硬件(德國產)進行算法模型的快速控制原型(RCP)驗證,通過搭建半實物仿真實驗平臺,將PC端MATLAB/Simulink中搭建的控制算法模型、MicroAuto Box硬件和動力電池測試系統結合起來,完成算法的在線驗證。
3.2 模型參數分層辨識精度驗證
為驗證提出的參數辨識方法的精確性,以美國城市道路循環工況(UDDS)作為參數辨識的驗證工況。將傳統參數辨識法[9]、分層參數辨識法計算得到的端電壓分別與實測端電壓數據進行對比,結果如圖2所示。
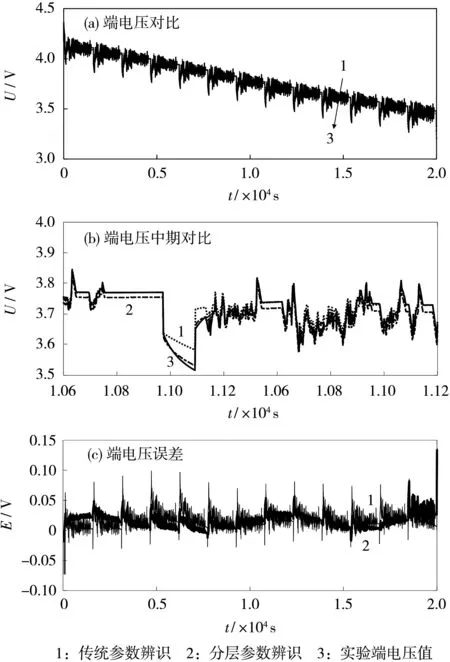
圖2 端電壓以及誤差對比Fig.2 Comparison of terminal voltage and error
從圖2(a)可知,在放電初期,傳統參數辨識法因參數初始化收斂速度緩慢,存在較大偏差;而分層參數辨識法收斂速度較快,誤差較小。放電后期電池SOC過低時,電池內部化學反應不穩定,導致辨識參數劇烈變化,分層參數辨識法的誤差略低于傳統參數辨識法。從圖2(b)可知,因分層架構具有較好的時變性和參數抗干擾性,可在線自適應地調節參數。從圖2(c)可知,相比于傳統參數辨識方法,分層參數辨識法的效果較好,端電壓誤差基本維持在合理范圍內,波動較平穩,能較好地描述實際輸出情況。
3.3 UDDS工況SOC估計精度驗證
為進一步驗證RMA-UKF算法在有噪聲干擾下的精度以及魯棒性,實驗選用UDDS工況進行鋰離子電池動態性能測試。驗證RMA-UKF算法的魯棒性時,與傳統UKF算法[6]進行對比。無高斯噪聲干擾時兩種算法的估計結果見圖3;有高斯噪聲干擾時兩種算法估計結果見圖4。
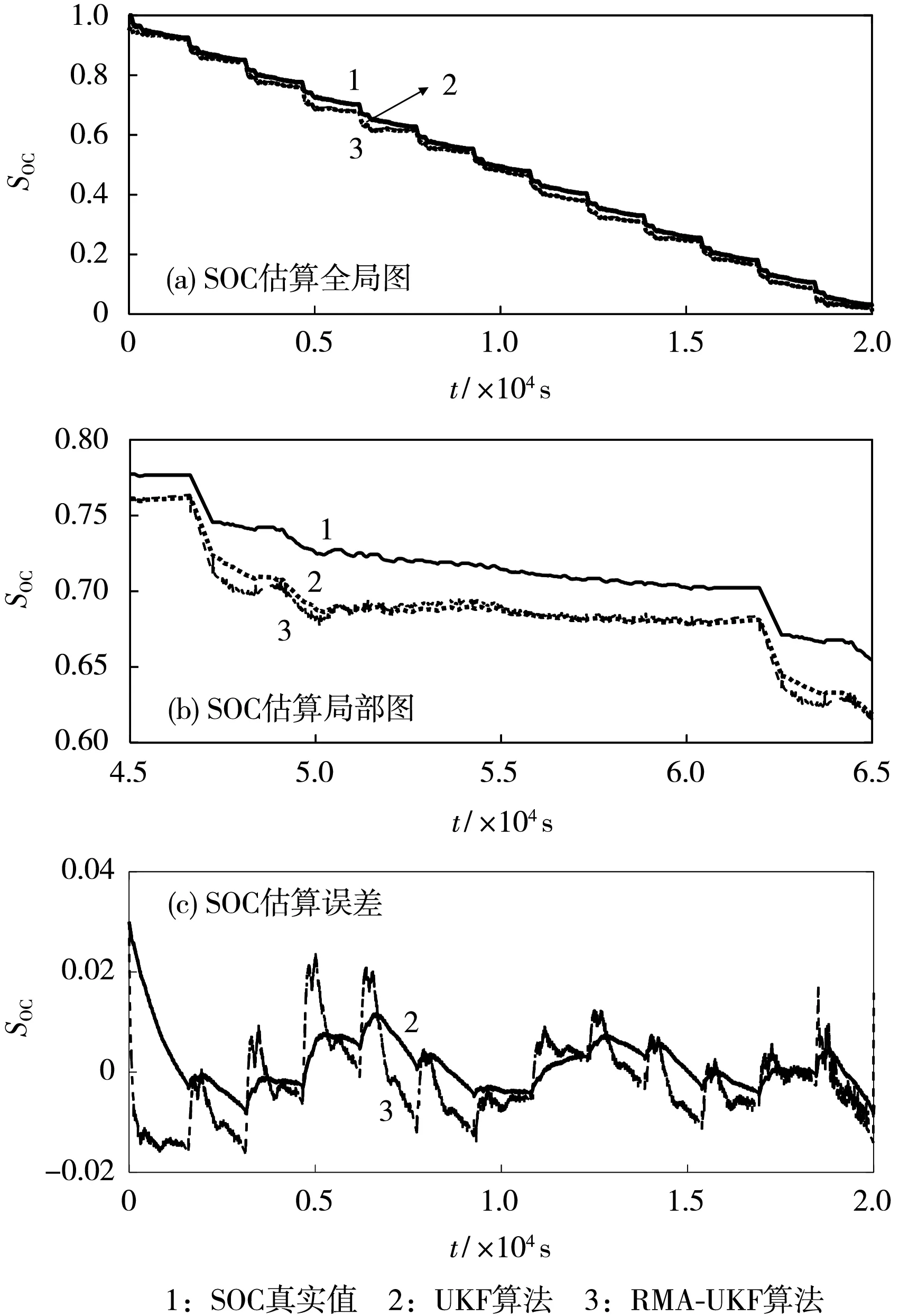
圖3 無高斯噪聲干擾的SOC估計結果Fig.3 State of charge(SOC)estimation results without Gaussian noise interference
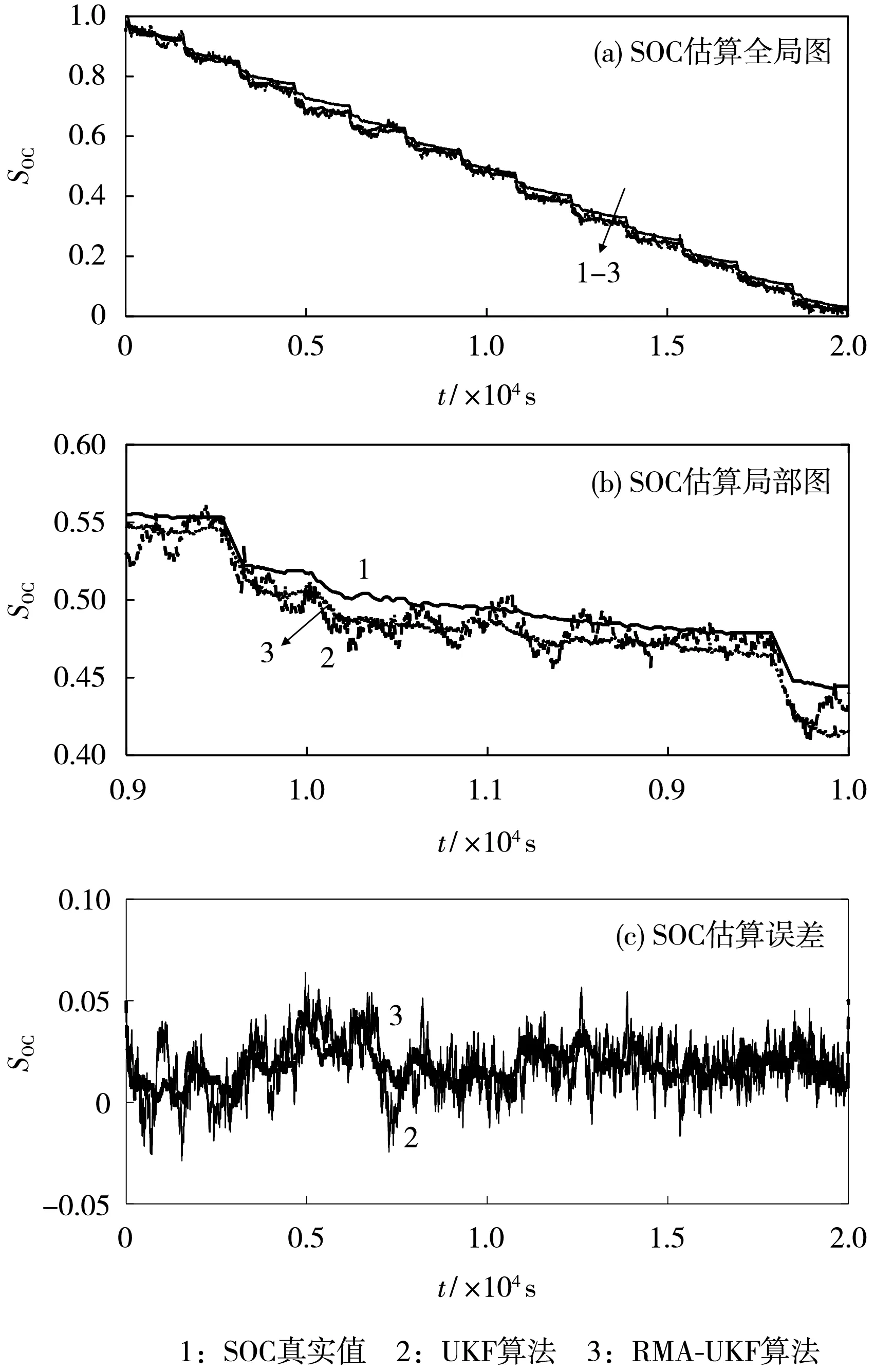
圖4 有高斯噪聲干擾的SOC估計結果Fig.4 SOC estimation results with Gaussian noise interference
從圖3(a)、(c)可知,在無高斯噪聲干擾的情況下,放電初期RMA-UKF算法因存在噪聲協方差補償部分,相比于傳統UKF算法能更快地收斂到真實SOC值,證明RMA-UKF算法對存在初始誤差的系統具有較高的抗干擾性。在放電中期和后期,RMA-UKF算法有較強的跟隨能力,從圖3(b)可知,RMA-UKF算法優化噪聲協方差的精度高于傳統UKF算法,整體誤差略低。
從圖4(a)、(c)可知,當附加高斯噪聲干擾時,用UKF算法估計SOC,曲線存在嚴重的波動,RMA-UKF算法的估計精度優于傳統UKF算法。RMA-UKF算法可充分利用每一步測量的數據,根據新測量的信息得到修正因子,并及時修正觀測噪聲協方差矩陣,增強對噪聲濾波的效果,因此,對噪聲干擾有較好的抑制作用。特別是從圖4(b)可知,相較于UKF算法,RMA-UKF算法的誤差整體波動小,說明能夠在外界噪聲干擾下實現電池SOC的精確估計。
3.4 工況誤差分析
為更加準確地分析RMA-UKF算法和傳統UKF算法的精度及魯棒性,實驗引入最大誤差(MAX)、平均誤差(MAE)和均方根誤差(RMSE)等3個評價指標,對基于RCP平臺的實驗結果進行分析。誤差統計結果如表1所示。
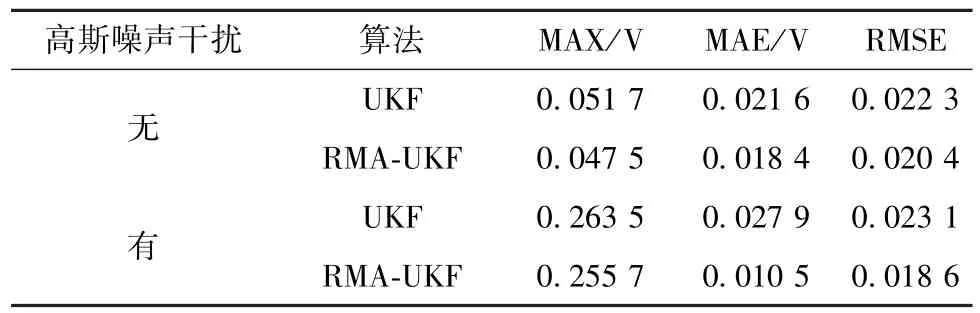
表1 RMA-UKF和UKF算法精度對比分析Table 1 Accuracy comparative analysis of RMA-UKF and UKF algorithm
從表1可知,在無高斯噪聲干擾的情況下,整體上RMAUKF算法的誤差比傳統UKF算法略低,可在各種復雜工況下較好地跟隨SOC的劇烈變化。在UDDS工況下,MAX、MAE和RMSE分別降低8.12%、1.48%和8.52%。在有高斯噪聲干擾的情況下,RMA-UKF算法的各項誤差指標均高于傳統UKF算法,能夠較好地應對噪聲污染,同時保持較高的精度和較快的收斂性。在 UDDS工況下,MAX、MAE和RMSE分別降低2.96%、6.24%和1.95%。實驗結果表明,RMA-UKF算法的高精度、高魯棒性能夠滿足各種復雜工況下的工程要求。
4 結論
為解決傳統電池模型參數極化抗干擾性差的問題,提出雙層阻容參數辨識的架構。參數精度驗證結果說明:相比于傳統參數辨識法,分層辨識法平均誤差降低6.7%,能較好反映參數的實時性和無偏性。
針對噪聲干擾下全生命周期SOC估計算法適應能力差的問題,提出RMA-UKF算法。該算法通過損失函數最小化得到修正因子,修正觀測噪聲協方差矩陣,過濾掉噪聲污染中的觀測野值,能較好地反映SOC估計算法的適應性和魯棒性。實驗結果表明,在無高斯噪聲干擾的情況下,RMA-UKF算法平均誤差為1.84%,相較于傳統UKF算法降低1.48%;在有高斯噪聲干擾情況下,RMA-UKF算法平均誤差為1.05%,相較于傳統UKF算法降低6.24%。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19