基于虛擬信號和高頻脈振信號注入的無位置傳感器內置式永磁同步電機MTPA控制
2022-01-06 01:06:44趙文祥邱先群
電工技術學報 2021年24期
關鍵詞:信號
趙文祥 劉 桓 陶 濤 邱先群
基于虛擬信號和高頻脈振信號注入的無位置傳感器內置式永磁同步電機MTPA控制
趙文祥 劉 桓 陶 濤 邱先群
(江蘇大學電氣信息工程學院 鎮江 212013)
為了降低傳統內置式永磁同步電機(IPMSM)低速無位置傳感器控制系統中的銅耗,該文提出一種基于虛擬信號和高頻脈振信號注入的最大轉矩電流比(MTPA)無位置控制技術,以提高電機的轉矩輸出能力和系統效率。為避免兩種控制算法相互干擾,與傳統虛擬信號注入MTPA控制策略不同,該文提出的方法在估計的dq軸上注入直流信號,通過功率計算來跟蹤MTPA工作點。該MTPA策略不會引起額外的損耗且不依賴于電機參數。與此同時,由于注入信號為直流信號,無位置傳感器控制精度并不會受到影響。實驗結果表明,所提方法在不同負載轉矩、不同轉速等工況下,能夠在準確追蹤MTPA工作點的同時準確地在線估計轉子位置。
內置式永磁同步電機 高頻脈振信號注入法 無位置控制策略 最大轉矩電流比控制 虛擬信號注入法
0 引言
內置式永磁同步電機(Interior Permanent Magnet Synchronous Motor, IPMSM)具有高轉矩密度、高效率、體積小等優點,已廣泛應用于電動汽車、航空航天等高端領域[1]。傳統控制方法需要通過機械傳感器獲得轉子位置及轉速信息,造成系統更加復雜、成本增加、可靠性降低等問題。為進一步拓寬IPMSM的應用領域,無位置傳感器控制技術已經成為當前研究的熱點[2-4]。
IPMSM在中高速范圍通常采用反電動勢法獲得轉子位置信息[5-7]。而在零低速時,由于電機反電動勢過小,不易準確獲取轉子位置信息,因此常采用高頻脈振信號注入法實現無位置傳感器控制[8-9]。高頻脈振信號注入法利用電機的凸極效應,向估計d軸注入高頻電壓信號,從高頻電流中提取出零低速下的轉子位置信息。該方法易于實現,具有較高的工程應用價值。為了簡化控制,無位置傳感器控制技術通常基于d=0控制。但是,為了充分利用IPMSM的磁阻轉矩,提升電機的轉矩輸出能力和系統效率,更應采取最大轉矩電流比控制(Maximum Torque Per Ampere, MTPA)。
為了實現MTPA控制,許多學者進行了相關的研究,主要分為兩種:一種是離線計算法,包括公式法和查表法[10-12]。公式法是將電機參數視為常數,通過對轉矩方程求取關于定子電流矢量角的導數并令其等于零,從而計算出MTPA控制時所對應的最佳電流矢量角,但電機的電感、磁鏈等參數會隨工況的不同而發生變化,所以這種方法精度較差且計算量較大。查表法主要將多次實驗或者有限元仿真得到的不同轉矩下最優dq軸電流繪制成表,用在線查表的方式給定最優的dq電流值,但是這需要進行多次離線測試且運行效果會受到實際工況的影響。另一種是在線估計法,包括極值搜索法和信號注入法。極值搜索法是通過比較不同電流矢量角下的定子電流幅值,尋找最小電流幅值對應的電流矢量角來實現MTPA控制[13-14],但這類方法收斂速度較慢導致動態響應能力較差。信號注入法通過注入高頻信號至電流、磁鏈或電壓矢量中,分析響應信號實現MTPA控制。但由于這類方法將信號注入到電機中,所以不可避免地會引起額外的轉矩脈動和損耗增加[15-17]。文獻[18-20]提出一種虛擬信號注入的方法,通過向電流矢量角中注入高頻正弦或者方波信號,構建注入信號后的電機模型實現MTPA控制。此類方法不依賴電機參數且并未將高頻信號注入到電機中,避免了由信號注入帶來的損耗增加等問題。
為提升控制系統的可靠性和效率,已有一些學者將MTPA控制與無位置傳感器控制相結合[21-23]。文獻[21]中,設計了基于反電動勢的轉矩觀測器,實現了MTPA控制。利用包含轉子位置信息的反電動勢,得到轉子位置信息。但是,該方法需要準確獲取電機的參數,并且只適用于中高速范圍。文獻[22]中,定義一個虛擬q軸電感值,用高頻虛擬信號注入的方式追蹤虛擬q軸電感值的變化,同時實現追蹤MTPA軌跡和無位置傳感器控制。但是,其無位置傳感器控制是通過基于反電動勢的方法,所以更適用于中高速范圍。文獻[23]中,將虛擬信號注入到基波平面追蹤MTPA軌跡,高頻脈振電壓信號注入諧波平面實現無位置傳感器控制,在五相電機上實現無位置傳感器MTPA控制。由于基波平面與諧波平面互相解耦,所以注入的兩種高頻信號不會互相干擾,但卻只適用于多相電機。
目前,虛擬信號注入MTPA控制策略注入的高頻信號主要有兩種形式:正弦信號和方波信號。對于正弦信號,通常需要使用帶通濾波器和低通濾波器獲取de/d。如果將其直接與高頻脈振注入無位置控制結合,較多的濾波器會進一步降低整個控制系統帶寬,影響系統動態響應能力。對于方波信號,省去濾波器的使用,但會使得到的電流矢量角中包含高頻方波信號。對于高頻脈振信號注入的無位置傳感器控制,不可避免地要向控制系統中注入高頻信號,這會使得d軸上存在兩種高頻信號,從而影響位置信號的提取。
為克服傳統虛擬信號注入MTPA控制策略與高頻脈振無位置控制策略結合的不足,本文提出一種基于直流虛擬信號注入的MTPA控制策略。在高頻脈振信號注入無位置控制策略的基礎上,為避免注入的兩種信號相互干擾,通過分別向估計dq軸上注入直流信號,計算出相應的功率追蹤MTPA工作點,來提升系統效率。兩種控制算法都是通過信號注入的方式對電機參數擾動具有一定的魯棒性。最后搭建IPMSM實驗系統,驗證該方法的可行性與有效性。
1 基于高頻脈振信號注入的位置估計策略
IPMSM在dq同步旋轉坐標系下電壓方程可表示為

式中,d和q分別為電機的d、q坐標系下電壓;d和q分別為d、q坐標系下電流;d和q分別為d、q坐標系下電感;f為永磁磁鏈幅值;為定子電阻;e為電機的電角速度。
當電機運行于零低速區且注入的信號頻率遠大于電機的旋轉角頻率時,反電動勢、定子電阻上的壓降可以忽略,則IPMSM高頻電壓模型可簡化為

式中,下標“h”為高頻分量。
在無位置傳感器控制系統中,由于轉子位置信息無法通過測量直接獲取,坐標變換無法實現。所以,假設估計dq軸坐標系,估計dq坐標系與實際dq坐標系關系如圖1所示。
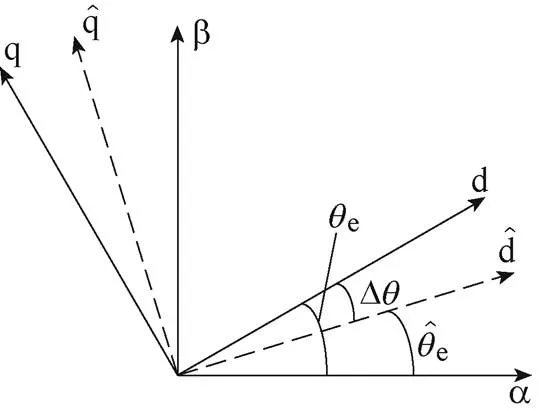
圖1 估計dq坐標系和實際dq坐標系
通常,向估計的d軸注入高頻電壓為hcos(h),得到估計dq軸下高頻電流響應為



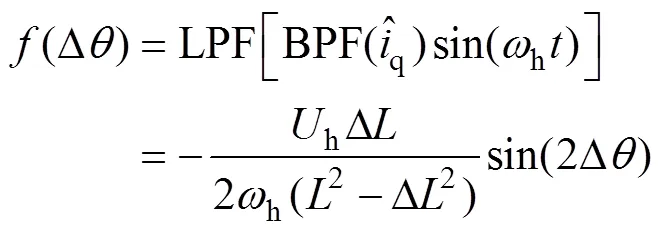
由式(5)可知,通過PI調節器將(Dq)調節至零,使估計位置與實際位置相等,可以獲得轉子轉速和位置估計值,這就是高頻脈振信號注入法的基本原理。
2 基于虛擬信號注入的MTPA控制
2.1 IPMSM數學模型
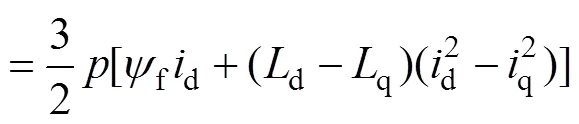
IPMSM在dq軸同步坐標系下的轉矩方程可以表示為

其中

式中,s為定子電流幅值;為定子電流矢量角;為電機極對數。由式(6)和式(7)可知,在滿足穩態輸出轉矩的條件下,存在唯一的,使定子電流幅值最小,即MTPA工作點。令轉矩表達式對電流矢量角的導數等于零,可以求得電機運行在MTPA工作點時的最佳電流矢量角。

根據式(8)求得最佳電流矢量角為
理論上,通過式(9)和電機參數的標稱值,可以計算出最佳電流矢量角。但由于電機電感、磁鏈等參數會隨著工況的改變而改變,此方法無法保證MTPA點追蹤的精度。
2.2 基于直流虛擬信號注入的MTPA控制策略
IPMSM的輸入功率可以表示為
在恒轉矩區,由于轉速較低,鐵耗可以忽略,式(10)可以進一步寫成

式中,copper為電機銅耗;out為電機的輸出功率。
由式(1)知,在穩態下,電壓方程可表示為

將式(12)代入式(11),則out可等效為

向估計d軸注入直流偏置量,注入后的電機輸出功率為

同理,向估計q軸注入直流偏置量后的電機輸出功率為

de/d可以進一步表示為
(16)
根據式(6),可得e對d和q的偏導數為

則由out、dout、qout表達式可得


根據式(16)、式(19)和式(20),可令

從式(21)可以看出,當系統處于穩態時,de/d與1成正比,即要使de/d=0,只需令1=0。由式(12)可得

將式(22)代入式(13)~式(15),out、dout、qout還可以表示為



根據以上分析,通過式(21)、式(23)~式(25)可獲取所需要的信號即de/d。由于定子電阻阻值很小,并且不隨電流變化。同時,由于永磁體的存在使得d軸磁路在空載時就已接近飽和,所以當電流變化時,d軸電感變化范圍比q軸電感要小,并且可以將注入虛擬信號幅值選取一個較小的數值進一步減小d軸電感變化帶來的影響。所以可以將定子電阻和d軸電感視為常數。

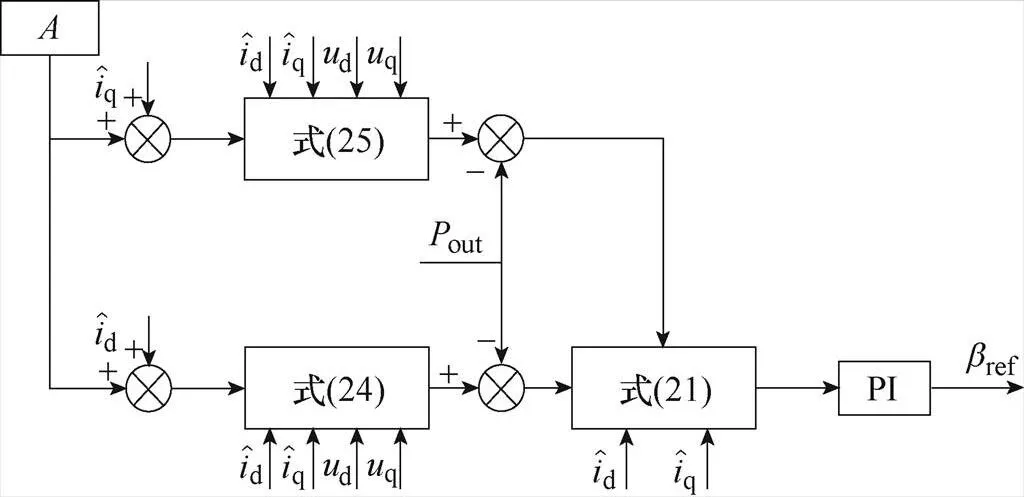
圖3 虛擬信號注入MTPA控制框圖
綜上分析,基于虛擬信號與高頻脈振信號注入的無位置傳感器永磁同步電機的MTPA控制策略框圖如圖4所示。該控制系統是基于傳統的速度環與電流環雙閉環控制,速度環輸出為定子電流幅值的大小,定子電流矢量角由MTPA模塊給定。因為,MTPA模塊中注入的是直流信號且無位置傳感器估計模塊只針對注入的高頻信號進行處理,所以MTPA模塊不會對位置估計產生影響。

圖4 所提算法的整體控制框圖
3 實驗結果及分析
為了驗證所提控制方法的可行性,搭建了如圖5所示的三相IPMSM控制系統實驗平臺。其中,直流電機提供負載,驅動器控制芯片型號為TI公司TMS320F28377。系統中通過光電編碼器獲得電機的實際轉子位置信號,該信號不參與系統控制,僅用于對比驗證。表1為實驗中內置式永磁同步電機參數。在實驗中,實驗電壓為50V,注入的高頻電壓信號頻率為800Hz,幅值為7V。
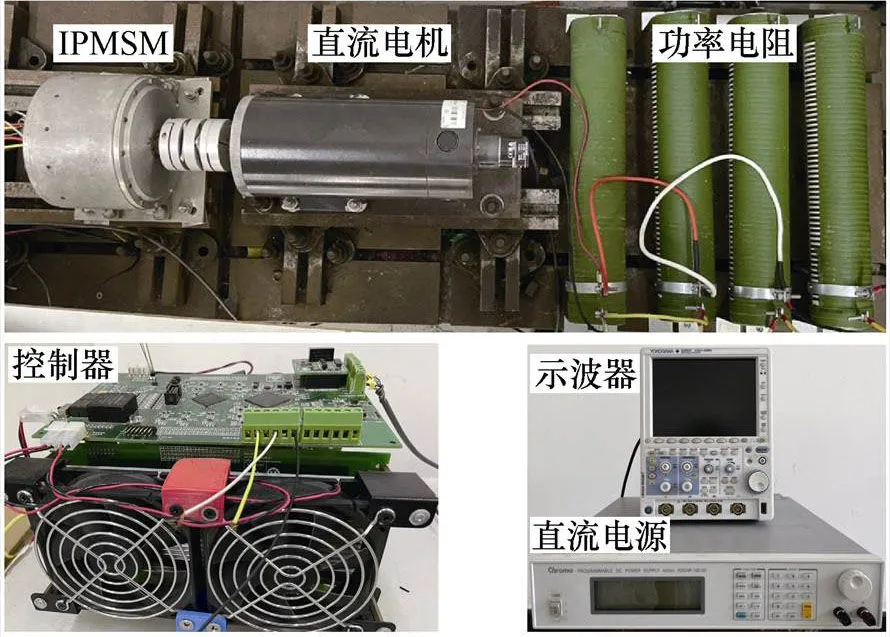
圖5 IPMSM控制系統實驗平臺
表1 內置式永磁同步電機參數

Tab.1 The parameters of prototype IPMSM
首先,為了驗證MTPA點追蹤精度不受無位置控制注入的高頻信號的影響,當電機運行于150r/min、負載轉矩為6N·m時,在2s處開始注入高頻信號,其定子電流矢量角的實驗結果如圖6所示。由實驗結果可以看出,在注入高頻信號后,定子電流矢量角不會發生變化,說明所提方法不受注入高頻信號的影響。
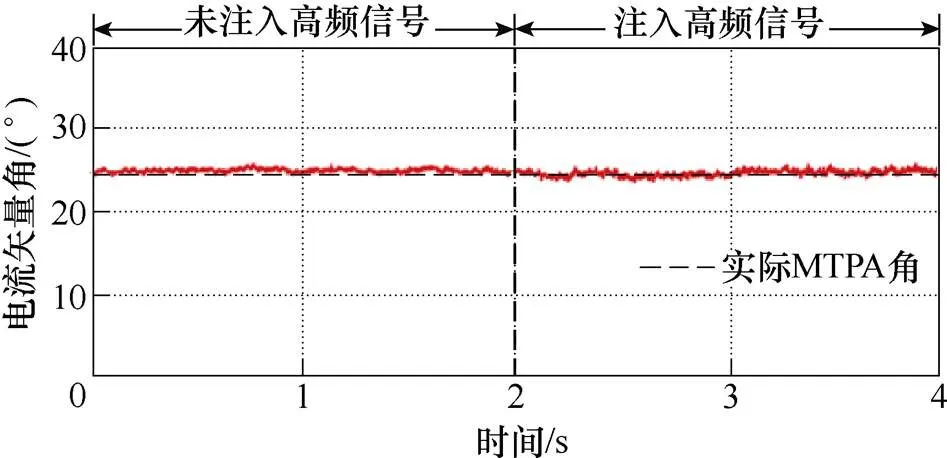
圖6 高頻信號注入后的電流矢量角
注入虛擬信號幅值應選取較小的值以降低d軸電感變化帶來的影響,本文取=0.5。為了驗證較小時,的變化對MTPA追蹤精度沒有影響,當電機轉速為150r/min,負載轉矩為5N·m時,在4s時將注入的虛擬信號幅值由0.5變成2,其估算位置誤差和電流矢量角如圖7所示。從實驗結果可見,虛擬信號幅值對MTPA追蹤精度和轉子位置估計值沒有影響。

圖7 虛擬信號幅值變化時的位置誤差與電流矢量角
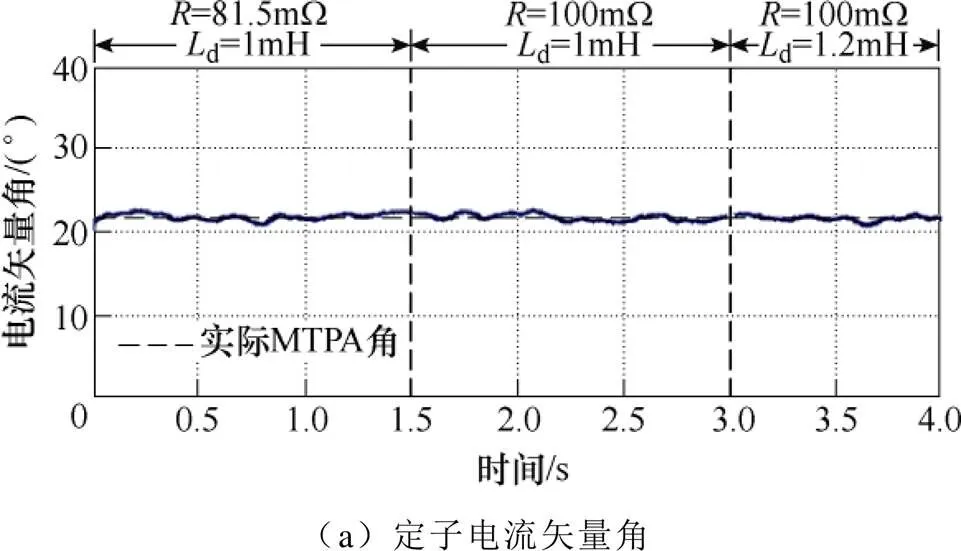
為了驗證算法的魯棒性,進行了變參數實驗。首先電機以準確參數運行,轉速為150r/min,負載轉矩為4N·m,1.5s時將算法中的定子電阻由81.5mW變為100mW,3s時將d軸電感由1mH變為1.2mH,定子電流矢量角、位置誤差和轉速誤差的實驗結果如圖8所示。由實驗結果可以看出,算法中電機參數變化對算法沒有影響,證明了提出算法有較好的魯棒性。
為了驗證MTPA算法的有效性,進行了將控制算法從d=0控制切換為MTPA控制的實驗。實驗中,電機轉速為150r/min,負載轉矩為4.5N·m,其結果如圖9所示。由圖9a和圖9b可見,d=0控制時轉子位置誤差平均值為10°,轉速誤差平均值在5r/min。切換到MTPA控制時,轉子位置估計會受到影響,這是由于d給定值的變化會使d軸電壓改變,從而導致位置觀測受到干擾,但轉子位置誤差的平均值仍為10°。由圖9c可知,所提方法可以在無位置傳感器控制下快速地追蹤到MTPA點。由圖9d、圖9e可見,d=0控制切換為MTPA控制時,d軸電流由0A減小為-3.8A,q軸電流由10A減小為8.5A,電流幅值由10A減小至9.5A。說明所提方法可以同時實現無位置傳感器控制和MTPA控制。

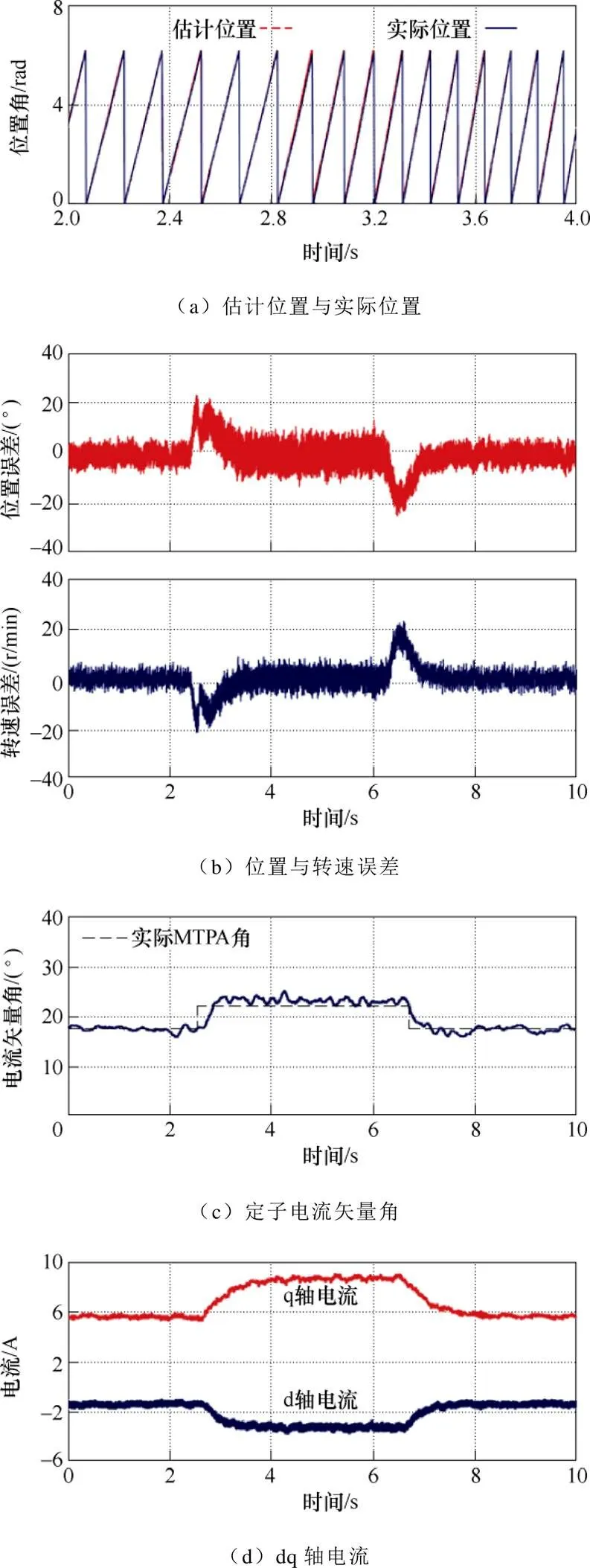
為了驗證所提方法的動態特性,進行了轉速突變實驗,實驗中電機負載轉矩為3N·m,轉速為100r/min,轉速由100r/min增加至150r/min,然后減少至100r/min,實驗結果如圖10所示。由于所搭平臺負載為直流電機帶功率電阻,所以轉速升至150r/min時,負載轉矩變為4N·m。由圖10a和圖10b可見,所提方法能快速響應負載轉速變化,最大估計轉子位置誤差為21°,最大轉速誤差為24r/min,穩態時轉子位置誤差為12°,轉速誤差為5r/min。由于轉速變化時負載也會變化,兩個條件變化導致動態誤差較大,同時本算法在追蹤MTPA點時d軸電壓會發生相應的變化,而高頻無位置信號是注入到d軸電壓上的,所以動態時會對無位置估算精度有所影響。由圖10c~圖10e可知,速度由100r/min增加至150r/min時,由于負載轉矩由3N·m增加至4N·m,定子電流矢量角從18°變為 23°;速度由150r/min減少至100r/min時,負載轉矩由4N·m減至3N·m,定子電流矢量角從23°減回至18°。d軸電流、q軸電流和電流幅值有相應的變化,且響應速度較快,說明所提方法可以在轉速轉矩變化時具有較好的動態響應能力與魯棒性。
4 結論
本文提出一種基于虛擬信號和高頻脈振信號的內置式永磁同步電機無位置傳感器MTPA控制。該方法通過向估計d軸注入高頻脈振電壓信號獲取轉子位置信息,向估計dq軸電流注入直流信號追蹤MTPA工作點。該虛擬信號注入方法不會產生額外的損耗,并且不依賴電機參數。與傳統虛擬信號注入MTPA方法相比,所提方法不會影響無位置控制算法,同時注入的高頻電壓信號不會影響MTPA追蹤精度。實驗結果表明,該方法能夠在不影響轉子位置估計精度、不依賴電機參數的情況下,實現MTPA控制,并且在不同工況下具有較好的動態響應能力和魯棒性。
[1] 劉國海, 張嘉皓, 陳前. 基于空間電壓矢量注入的頻率可變型五相永磁同步電機最大轉矩電流比控制[J]. 電工技術學報, 2020, 35(20): 4287-4295.
Liu Guohai, Zhang Jiahao, Chen Qian. Variable frequency maximum-torque-per-ampere control for five-phase permanent-magnet motor based on space voltage vector injection[J]. Transactions of China Electrotechnical Society, 2020, 35(20): 4287-4295.
[2] 李文真, 劉景林. 考慮磁路飽和及交叉耦合效應的內置式永磁同步電機無傳感器優化方法[J]. 電工技術學報, 2020, 35(21): 4465-4474.
Li Wenzhen, Liu Jinglin. An improved sensorless method of IPMSM considering magnetic saturation and cross-coupling effect[J]. Transactions of China Electrotechnical Society, 2020, 35(21): 4465-4474.
[3] 杜博超, 崔淑梅, 宋立偉, 等. 一種基于變頻電流信號的IPMSM無位置傳感器高頻注入電流噪聲抑制方法[J]. 電工技術學報, 2020, 35(18): 3830-3837.
Du Bochao, Cui Shumei, Song Liwei, et al. A variable frequency current injection sensorless control strategy of IPMSM for audible noise reduction[J]. Transa- ctions of China Electrotechnical Society, 2020, 35(18): 3830-3837.
[4] Chen Qian, Shi Xuping, Xu Gaohong, et al. Torque calculation of five-phase synchronous reluctance motors with shifted-asymmetrical-salient-poles under saturation condition[J]. China Electrotechnical Society Transactions on Electrical Machines and Systems, 2020, 4(2): 105-113.
[5] 矯帥, 趙文祥, 邱先群, 等. 基于改進式反電動勢法的直線游標永磁電機無位置傳感器控制[J]. 電工技術學報, 2016, 31(增刊2): 236-242.
Jiao Shuai, Zhao Wenxiang, Qiu Xianqun, et al. Sensorless control of linear permanent magnet vernier motor based on improved stator back EMF[J]. Transactions of China Electrotechnical Society, 2016, 31(S2): 236-242.
[6] Zhang Xing, Li Haoyuan, Yang Shuying, et al. Improved initial rotor position estimation for PMSM drives based on HF pulsating voltage signal inje- ction[J]. IEEE Transactions on Industrial Electronics, 2018, 65(6): 4702-4713.
[7] Zhang Guoqiang, Wang Gaolin, Wang Huiying, et al. Pseudo random-frequency sinusoidal injection based sensorless IPMSM drives with tolerance for system delays[J]. IEEE Transactions on Power Electronics, 2019, 34(4): 3623-3632.
[8] 劉計龍, 付康壯, 麥志勤, 等. 基于雙頻陷波器的改進型高頻脈振電壓注入無位置傳感器控制策略[J]. 中國電機工程學報, 2021, 41(2): 749-759.
Liu Jilong, Fu Kangzhuang, Mai Zhiqin, et al. Sensorless control strategy of improved HF pulsating voltage injection based on dual frequency notch filter[J]. Proceedings of the CSEE, 2021, 41(2): 749-759.
[9] 吳春, 陳科, 南余榮, 等. 考慮交叉飽和效應的變角度方波電壓注入永磁同步電機無位置傳感器控制[J]. 電工技術學報, 2020, 35(22): 4678-4687.
Wu Chun, Chen Ke, Nan Yurong, et al. Variable angle square-wave voltage injection for sensorless con- trol[J]. Transactions of China Electrotechnical Society, 2020, 35(22): 4678-4687.
[10] 徐心愿, 王云沖, 沈建新. 基于最大轉矩電流比的同步磁阻電機DTC-SVM控制策略[J]. 電工技術學報, 2020, 35(2): 246-254.
Xu Xinyuan, Wang Yunchong, Shen Jianxin. Direct torque control-space vector modulation control strategy of synchronous reluctance motor based on maximum torque per-ampere[J]. Transactions of China Electrotechnical Society, 2020, 35(2): 246-254.
[11] Jung S Y, Hong J, Nam K. Current minimizing torque control of the IPMSM using ferrari’s method[J]. IEEE Transactions on Power Electronics, 2013, 28(12): 5603-5617.
[12] Li Ke, Wang Yi. Maximum torque per ampere (MTPA) control for IPMSM drives based on a variable- equivalent-parameter MTPA control law[J]. IEEE Transactions on Power Electronics, 2019, 34(7): 5402-5410.
[13] Liu Qian, Hameyer K. High-performance adaptive torque control for an IPMSM with real-time MTPA operation[J]. IEEE Transactions on Energy Conversion, 2017, 32(2): 571-581.
[14] Wang Gaolin, Li Zhuomin, Zhang Guoqiang, et al. Quadrature PLL-based high-order sliding-mode observer for IPMSM sensorless control with online MTPA control strategy[J]. IEEE Transactions on Energy Conversion, 2013, 28(1): 221-224.
[15] Liu Guohai, Wang Jian, Zhao Wenxiang, et al. A novel MTPA control strategy for IPMSM drives by space vector signal injection[J]. IEEE Transactions on Industrial Electronics, 2017, 64(12): 9243-9252.
[16] Li Ke, Wang Yi. Maximum torque per ampere (MTPA) control for IPMSM drives using signal injection and an MTPA control law[J]. IEEE Transactions on Industrial Informatics, 2019, 15(10): 5588-5598.
[17] Xia Jinhui, Guo Yuanbo, Li Ze, et al. Step-signal- injection-based robust MTPA operation strategy for interior permanent magnet synchronous machines[J]. IEEE Transactions on Energy Conversion, 2019, 34(4): 2052-2061.
[18] Sun Tianfu, Wang Jiabin, Chen Xiao. Maximum torque per ampere (MTPA) control for interior permanent magnet synchronous machine drives based on virtual signal injection[J]. IEEE Transactions on Power Electronics, 2015, 30(9): 5036-5045.
[19] Wang Jun, Huang Xiaoyan, Yu Dong, et al. An accurate virtual signal injection control of MTPA for an IPMSM with fast dynamic response[J]. IEEE Transactions on Power Electronics, 2018, 33(9): 7916-7926.
[20] Chen Qian, Zhao Wenxiang, Liu Guohai, et al. Extension of virtual-signal-injection-based MTPA control for five-phase IPMSM into fault-tolerant operation[J]. IEEE Transactions on Industrial Elec- tronics, 2019, 66(2): 944-955.
[21] Lin Faa-Jeng, Hung Ying-Chih, Chen Jia-Ming, et al. Sensorless IPMSM drive system using saliency back- EMF-based intelligent torque observer with MTPA control[J]. IEEE Transactions on Industrial Infor- matics, 2014, 10(2): 1226-1241.
[22] Tang Qipeng, Shen Anwen, Luo Pan, et al. IPMSMs sensorless MTPA control based on virtual q-axis inductance by using virtual high-frequency signal injection[J]. IEEE Transactions on Industrial Elec- tronics, 2020, 67(1): 134-146.
[23] Zhang Jiahao, Liu Guohai, Chen Qian. MTPA control of sensorless IPMSM drive system based on virtual and actual high-frequency signal injection[J]. IEEE Transactions on Transportation Electrification, 2021, 7(3): 1516-1526.
MTPA Control of Sensorless IPMSM Based on Virtual Signal and High-Frequency Pulsating Signal Injection
(School of Electrical and Information Engineering Jiangsu University Zhenjiang 212013 China)
To reduce the copper loss of the traditional sensorless control system for interior permanent magnet synchronous motor (IPMSM) at low-speed region, a new method of virtual signal and high-frequency pulsating signal injection is proposed to realize the sensorless control and the maximum torque per ampere (MTPA) control simultaneously to improve the motor output torque capability and system efficiency. Different from the traditional MTPA control based on virtual signal injection, the proposed MTPA method injects a virtual constant signal into the estimated d-axis and q-axis currents, thereby avoiding the inference between the two control strategies. The proposed MTPA method does not cause additional copper loss and is parameter independent. Besides, since the injected signal in MTPA method is constant, the detection accuracy of rotor position will not be affected. The experiments verify the proposed method can realize the sensorless control and the MTPA control simultaneously and accurately under different load and speed conditions.
Interior permanent magnet synchronous motor, high-frequency pulsating signal injection, sensorless control, maximum torque per ampere control, virtual signal injection
10.19595/j.cnki.1000-6753.tces.211039
TM315
國家杰出青年科學基金資助項目(52025073)。
2021-07-12
2021-09-17
趙文祥 男,1976年生,教授,博士生導師,研究方向為電機及其控制。E-mail: zwx@ujs.edu.cn
劉 桓 男,1995年生,碩士研究生,研究方向為永磁電機的驅動控制。E-mail: 729284143@qq.com
(編輯 崔文靜)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06