基于M-Rife算法的梯形波FMCW雷達多目標檢測技術研究
2022-01-06 12:33:06崔英杰劉云學宋健強焦浩
電子設計工程 2021年24期
關鍵詞:信號
崔英杰,劉云學,宋健強,焦浩
(煙臺大學光電信息科學技術學院,山東煙臺 264005)
線性調頻連續波(LFMCW)雷達具有測距精度高、分辨率高、結構簡單和體積小等優點,近年來在軍用領域和民用領域得到了廣泛應用[1-2]。傳統的LFMCW 雷達有鋸齒波調制與對稱三角波調制兩種頻率調制方式[2]。鋸齒波調制方式存在距離速度耦合問題,對稱三角波調制方式雖然能通過上下掃頻差拍回波信號中心頻率解距離-速度耦合,但在多目標情況下,又存在上下掃頻頻譜配對的問題。
文獻[3-6]通過將線性調頻連續波與恒頻連續波相結合,提出了許多三角波與恒頻連續波組合的發射波形。這些波形原理基本相同,都是通過恒定頻率段測得目標速度再與上下掃頻段配對得到的目標進行匹配,去除虛假目標。恒頻段測速精度成為多目標配對的關鍵,如果恒頻段測得目標速度不夠準確,就有可能與虛假目標配對,形成錯誤配對從而漏掉真實目標。
考慮到實現的復雜度,雖然有很多恒頻段測頻方法[7-10],工程中通常采用快速傅里葉變換(FFT)分析LFMCW 雷達差拍回波信號的頻譜,估計信號的頻率。但由于FFT 存在頻譜泄露和柵欄效應,當頻譜實際峰值譜線與FFT 的譜線不重合時,就會產生較大的頻率誤差[11]。在FFT 變換的基礎上,采用MRife 算法[12]來進行頻率估計,既提高頻率估計的精度,增大的計算量又非常有限,從而提高了測速的精度,降低了與虛假目標配對的可能性,也就提高了梯形波FMCW 雷達的多目標檢測能力。
1 梯形波基本原理
1.1 梯形波恒定頻率段測速原理
將雷達發射信號和回波信號經過混頻器混頻,就得到差拍回波信號,對差拍回波信號進行頻譜分析就可以得到目標的距離和速度信息。梯形波調頻連續波信號包含上下掃頻段和恒定頻率段,其雷達工作原理如圖1 所示,圖中實線為雷達發射信號,虛線為回波信號,發射信號與回波信號形狀相同,時間相差2(R+vt)/c,R為目標距離,v為目標速度,c為光速,f(t)為梯形波信號,fIF(t) 為差拍回波信號。
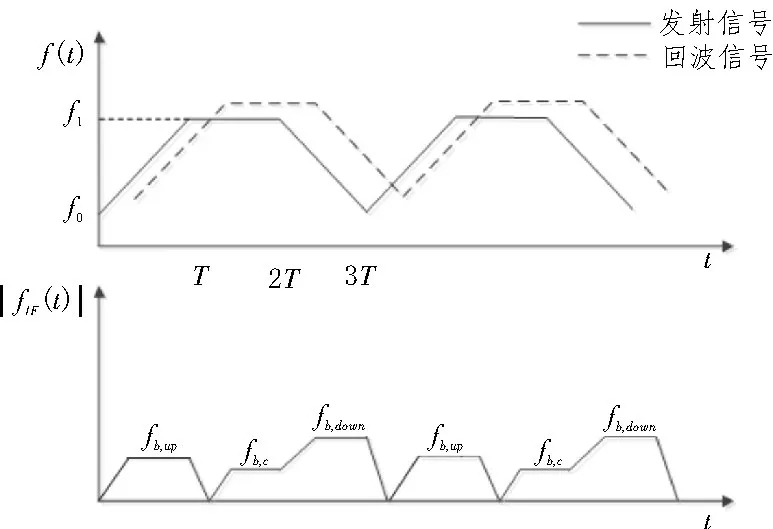
圖1 梯形波LFMCW雷達原理圖
下面對恒定頻率段的測速原理進行分析,對于恒定頻率段t∈[T,2T],雷達發射信號為:

雷達接收到的回波信號為:

其中A為振幅,f1為恒頻段頻率,Kr為反射系數,τ(t)為延時函數,φ為隨機初相,φ為目標反射后引起的相位變化。
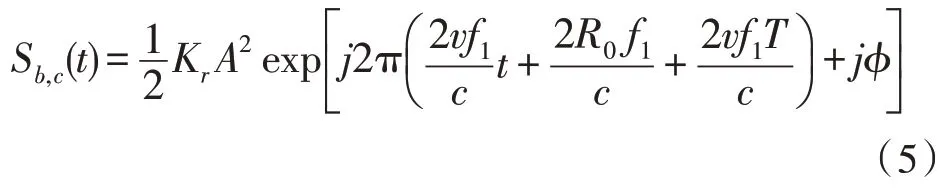
將St,c(t)和Sr.c(t)混頻,得到差拍回波信號:


將上式進行正交復變換得:
將上式作傅里葉變換得:
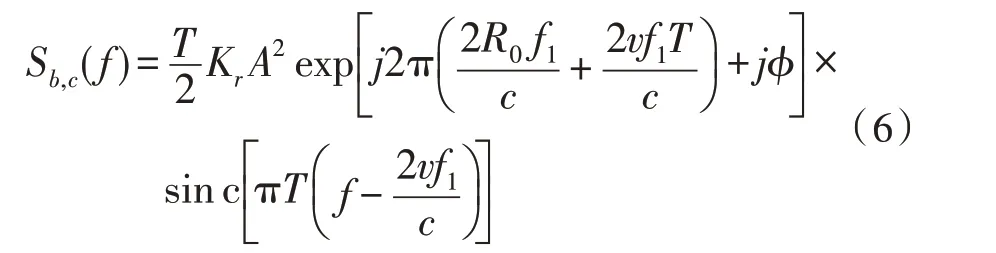
由式(6)可以看出,恒定頻率段的差拍回波信號頻譜幅度峰值處中心頻率為:

中心頻率只包含目標的速度信息,所以通過恒頻段可得到目標的速度。由上式可得目標的速度為:

顯然恒定頻率段測速精度取決于頻率fb,c的估計精度。
1.2 梯形波多目標配對原理
在多目標情況下,梯形波上下掃頻段頻譜圖中會出現多個峰值,這就面臨上下掃頻目標配對問題[13]。恒定頻率段由于未經過調制可直接測得目標的速度信息,通過恒頻段測得的目標速度與上下掃頻解距離-速度耦合得到的速度進行配對,這樣可望排除虛假目標得到真實目標。在理想情況下,可以通過該方法配對得到正確的目標。當恒頻段測得的目標速度存在誤差且真實目標速度與虛假目標的速度很接近時就很容易錯配[14],而通過M-Rife 算法測得目標速度更加準確,能夠防止虛假目標與正確目標進行配對,如圖2 所示。
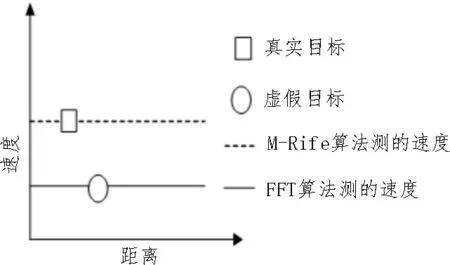
圖2 目標正確配對與錯誤配對
2 算法分析
2.1 Rife算法
Rife 算法[15]通過對信號幅度頻譜最大譜線和相鄰次最大譜線進行插值來進行頻率的估計。
假設信號經過FFT 之后,最大譜線出現在k0處,通過Rife 算法得到的頻率估計值為:

其中,fs為采樣頻率,N為采樣點數,|X(k0)|為最大譜線值,|X(k0+r)| 為相鄰次最大譜線值,當|X(k0+1)|≥|X(k0-1)|時,r=1,當X(k0+1)|<|X(k0-1)|時,r=-1。
2.2 M-Rife算法
有噪聲干擾情況下,當信號頻率位于離散傅里葉變換(DFT)量化頻率點附近時,Rife算法誤差較大[12],為了改善量化頻率點附近頻率估計誤差較大這一缺陷,文獻[12]中提出了M-Rife 算法。
針對Rife 算法當估計的頻率位于兩個相鄰量化點頻率中心區域估計精度高這一特點,M-Rife 算法主要通過信號序列的移位減小頻率估計的誤差。M-Rife 算法思想:先執行一次Rife 算法,若估計到的頻率值在兩個相鄰量化頻率點的中心區域時則算法停止;若估計到的頻率值接近量化頻率點,則信號序列移位Δf/3(Δf=Fs/M),Fs為采樣頻率,M為FFT 點數,然后重新執行一次Rife 算法以得到頻率的精確估計[16]。M-Rife 算法測速流程如圖3 所示。
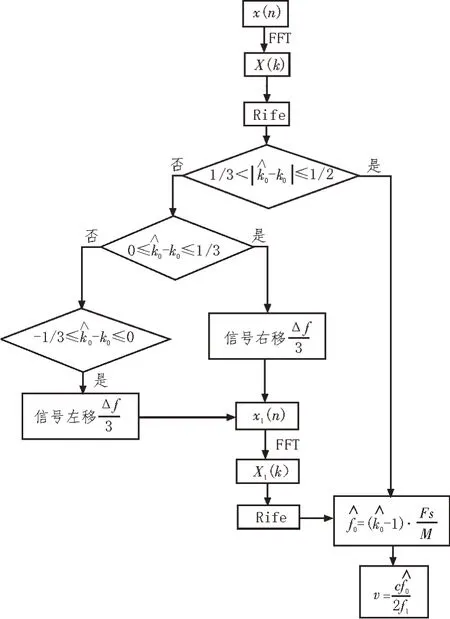
圖3 M-Rife算法測速流程圖
文中研究的M-Rife 測速法步驟如下:
1)對梯形波恒頻段差拍回波信號x(n) 作M點FFT 得X(k)。
2)由FFT 得到頻譜峰值最大值對應的FFT 點數k0,由Rife 算法得到的頻譜峰值的最大值對應的FFT點數為,計算Δk=-k0。
3)若1/3 <|Δk|≤1/2,直接計算頻率估計值,再由式(8)求得速度測量值。
4)若0 ≤Δk≤1/3,信號右移Δf/3 得到x1(n),將x1(n)進行FFT,再經過一次Rife 算法,計算頻率估計值,再由式(8)求得速度測量值。若-1/3 ≤Δk≤0,信號左移Δf/3 得到x1(n),將x1(n) 進行FFT,再經過一次Rife 算法,計算頻率估計值,再由式(8)求得速度測量值。
3 仿真分析
文中使用Matlab 進行仿真驗證,設定系統仿真參數,如表1 所示。通過實驗,采集了不同速度差拍回波信號的數據,分別利用FFT 算法、M-Rife 算法進行頻率估計,并計算出相應的速度,進行多目標配對。
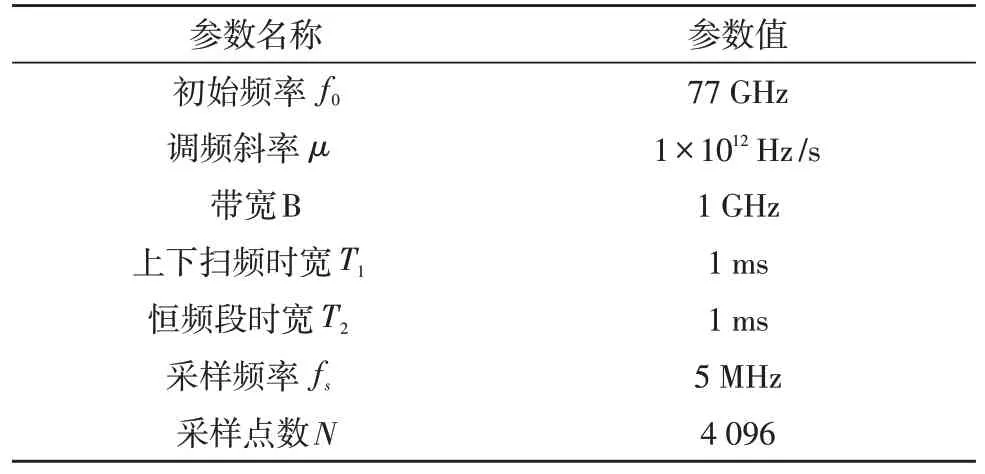
表1 系統仿真參數
信號的頻率分辨率為Δf=fs/N=1 220.703 125 Hz,根據式(8)可得v=fb,c/520,故速度分辨率為Δv=Δf/52=2.347 506 m/s。選取一個目標,距離保持不變,加入信噪比(SNR)為-5 dB 的加性高斯白噪聲進行仿真,表2 為速度在6.00~14.00 m/s 之間的仿真數據,圖4 為不同速度測量誤差的對比圖。
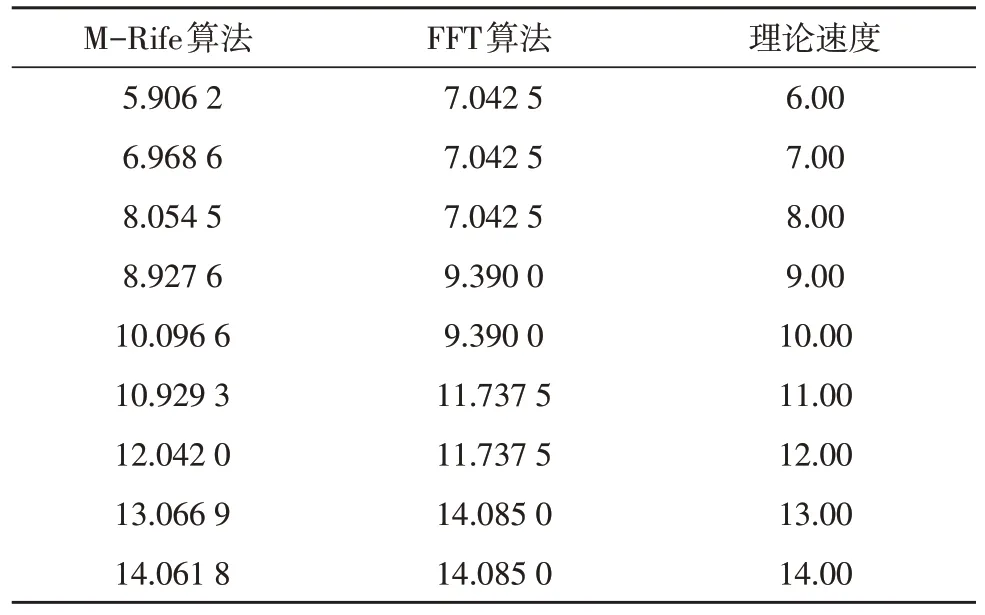
表2 不同算法得到的速度(m/s)與理論速度(m/s)的對比
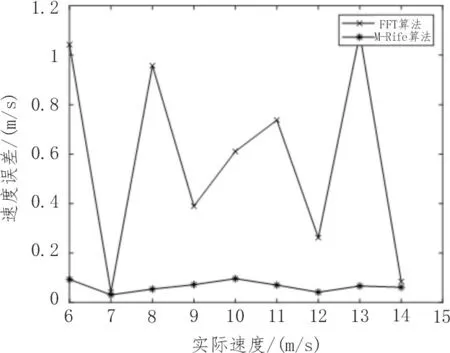
圖4 速度測量誤差對比
由表2 和圖4 的誤差曲線可以看出,該文采用的M-Rife 算法與FFT 算法相比,測速誤差在整個速度段上都有明顯的減小。由表2 中的數據可看出,在目標速度為13 m/s 時,FFT 算法的速度誤差為1.0850 m/s,為整個速度段中誤差最大的點。表3 為不同信噪比下的速度誤差。
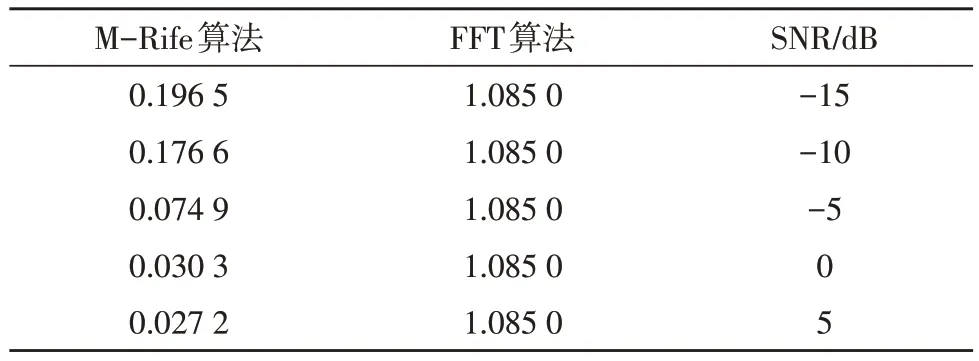
表3 不同信噪比下的速度誤差(m/s)
由表3 可以看出,隨著SNR 的增大,FFT 算法的測速誤差不變,而M-Rife 算法的測速誤差逐漸減小,并且M-Rife 算法的測速誤差遠小于FFT 算法。
以上仿真結果已經證明,與FFT 直接法相比,基于M-Rife 算法的恒頻測速精度更高。下面對此測速算法在提高梯形波FMCW 雷達多目標檢測能力方面進行仿真驗證。設置3 組目標,分別包含速度距離都不同、部分目標速度相同距離不同、部分目標距離相同速度不同的,目標參數如表4 所示。加入SNR 為-5 dB 的加性高斯白噪聲進行仿真,多目標配對結果分別如圖5、圖6、圖7 所示。每個圖中包含(a)、(b)、(c)、(d)4 個小圖,圖(a)和圖(c)為用FFT 算法和M-Rife 算法恒頻測速然后進行目標配對的圖,圖(b)和圖(d)為目標配對的結果。

表4 目標參數
在圖5 中,由FFT 算法在恒定頻率段測的速度進行多目標配對得到4 個目標,通過與真實目標對比,其中有兩個虛假目標。同樣在圖6 和圖7 中,FFT 算法恒頻測速進行多目標配對得到4 個目標中都有一個虛假目標。而通過M-Rife 算法恒頻測速再進行多目標配對的3 組配對結果都為真實目標。由以上目標配對結果可以看出,由FFT 算法恒頻測速再進行目標配對都出現了目標錯配的情況,得到的3 組目標中都存在虛假目標,而M-Rife 算法恒頻測速再進行目標配對得到目標全部為真實目標。以上仿真實驗結果表明,相比于FFT 算法,在相對復雜多目標環境中,用M-Rife 算法進行恒頻測速然后進行多目標配對能夠排除虛假目標而得到真實目標,其多目標檢測能力更強。
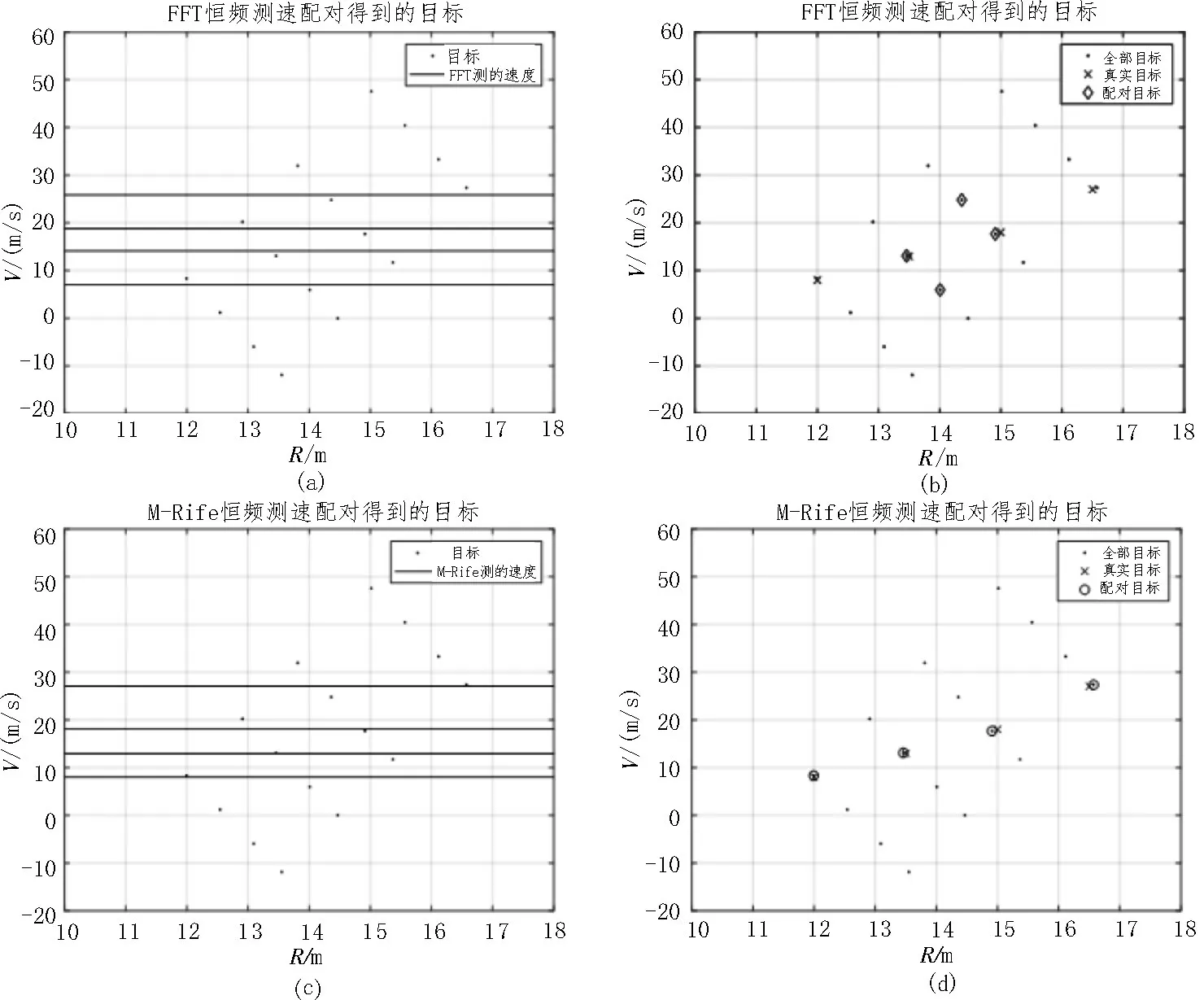
圖5 第一組目標配對結果
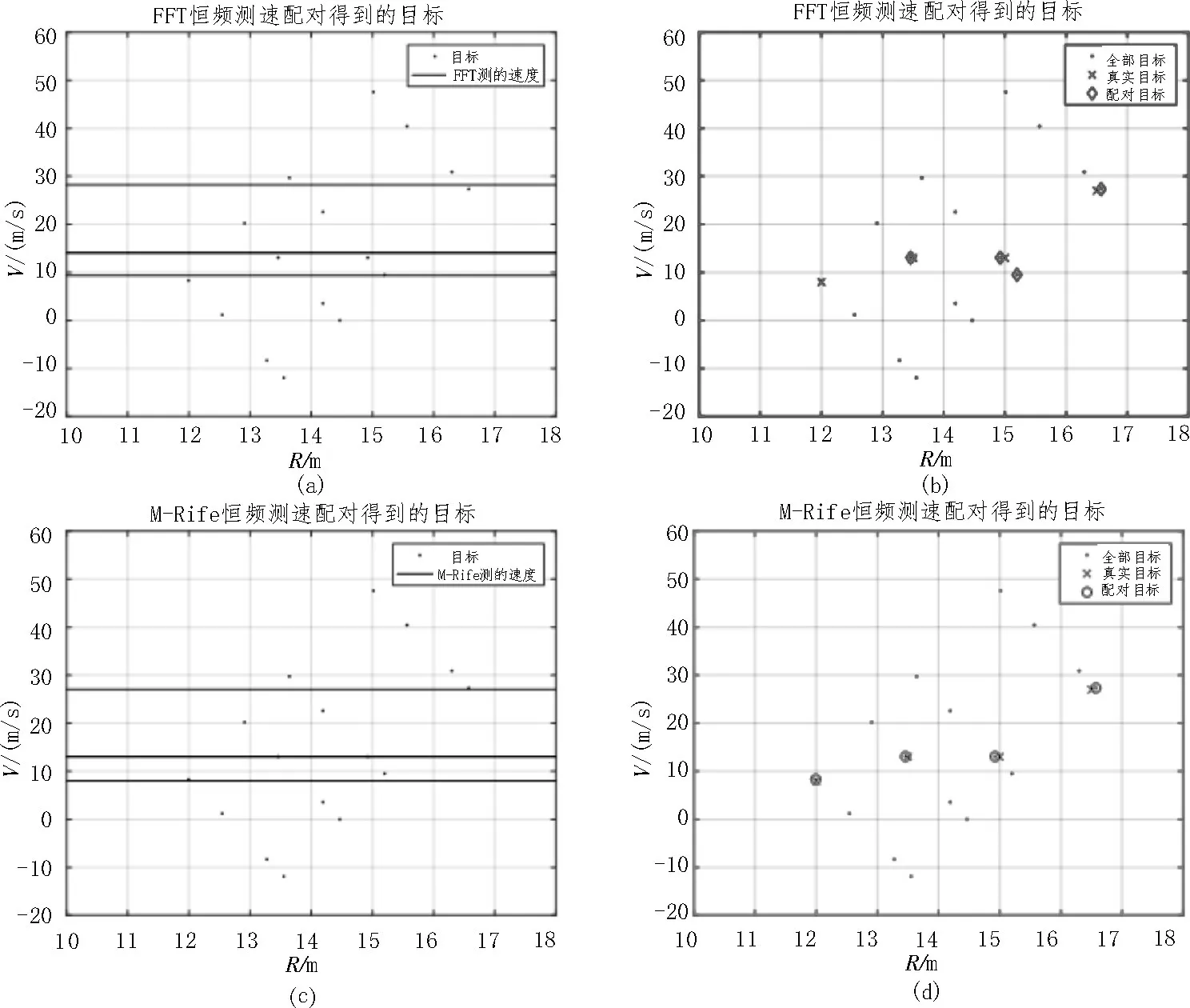
圖6 第二組目標配對結果
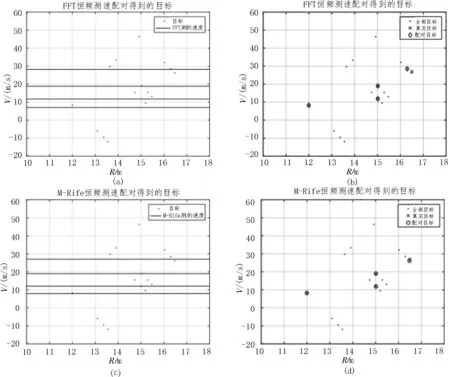
圖7 第三組目標配對結果
4 結論
該文研究了一種提高梯形波FMCW 雷達恒頻段測速精度以改善多目標檢測能力的方法,用M-Rife算法來估計梯形波恒頻段差拍回波信號的頻率。該算法與FFT 直接法相比,雖然增加了少量運算量,但顯著提高了頻率估計的精度,從而提高了測速的精度。仿真結果表明,在進行多目標檢測時,當恒頻段采用了M-Rife 算法進行頻率估計后,梯形波FMCW雷達多目標檢測能力提高很明顯。該算法易于實現,可應用于梯形波FMCW 雷達多目標檢測系統。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06