基于AI 圖像識別的油電混動多旋翼無人機自動控制系統
2022-01-06 12:33:24饒成成
電子設計工程 2021年24期
饒成成
(廣東電網有限責任公司機巡管理中心,廣東廣州 510000)
旋翼式無人機具備很多傳統的固定翼無人機不具備的優良低空性能,所以旋翼式無人機被廣泛地使用在社會的各個領域,例如農業監測和農藥噴灑、地質勘探及測繪等[1]。然而,現有旋翼類無人機的實際應用情況,多以電動或油動旋翼類無人機為主,這些類型旋翼無人機存在一定缺陷。電動旋翼類無人機重載飛行時間較短,需要頻繁更換電池,且其充電時間較長,需要備有多個電池。油動旋翼類無人機適合長時間重載飛行,但油機發生墜機事故的風險也較高[2-3]。
針對現有旋翼無人機動力不足而影響其使用性能的缺點,提出設計油電混合動力的多旋翼無人機控制系統。多旋翼無人機結構簡單,受到廣泛關注并得到廣泛應用。但傳統基于GPS 油電混合動力的多旋翼無人機控制精度較低,對無人機的控制無法達到設定目標,在此基礎上提出一種基于AI 圖像識別技術的多旋翼無人機油電混合動力自動控制系統。
1 硬件結構設計
多旋翼飛行器由機載控制系統、地面控制平臺和動力系統組成,空載平臺工作范圍可控制飛行器自身姿態和航向;地面控制站任務是對多旋翼飛行器的飛行狀態進行監控的同時,將飛行任務指令下發到飛行控制器;電力系統任務是對飛行器的運行提供電力[4]。飛行控制硬件系統的可靠性在很大程度上影響整個系統的穩定性與安全性,動力系統的優劣直接影響無人機運行時長[5]。
無人機飛行控制系統主要包括導航系統、飛行控制器、電源系統、無線通信模塊、電機驅動系統,如圖1 所示。
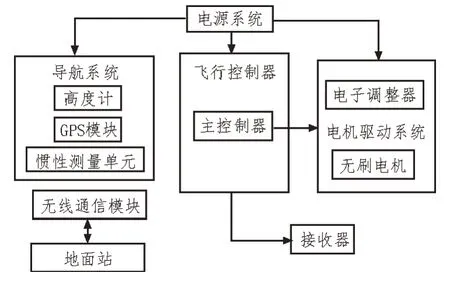
圖1 控制系統總體結構
1.1 主控制器
主控機部分為飛行控制系統的核心,主控板的任務范圍包括以下幾個方面:采集與獲取傳感器數據信息,結合算法求出飛行器姿態、高度、位置等信息;接收遙控信號或下達的控制命令,再將其轉換為對應的控制量,完成手動和自動操作并行;將獲取儲存的數據信息,借助無線方式傳達到基站[6-8]。其參數設置為:
1)包括最基本的電路,如5 V 轉3.3 V 電壓穩定電路、復位電路以及啟動選擇電路;
2)所有通用I/O 口均可引出,便于連接外部設備;具有外接接口、支持模擬、下載以及調試功能;
3)具有電源指示LED 燈,以及連接到I/O 口用戶可使用的LED 燈;
4)配置IIC 接口,有利于數據的存儲;預留NandFlash 接口,增大儲存空間;
5)配備SD 卡座,便于數據的儲存和讀取,外形尺寸小為60 mm×47 mm,便于嵌入使用。
1.2 GPS定位模塊
對GPS 定位模塊調和后,控制器能夠獲得定位點的緯度、經度信息。GPS 模塊結構如圖2 所示。
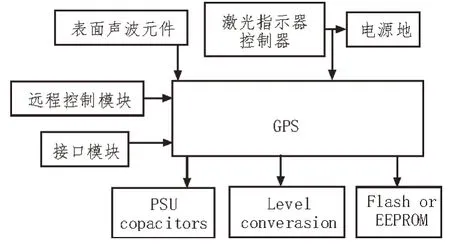
圖2 GPS模塊結構
GPS 由RX 遠程模塊、SAW 表面聲波元件、LDO激光指示器控制器、PSU copacitors、Level converasion以及一系列接口組成,接口組成如表1 所示。
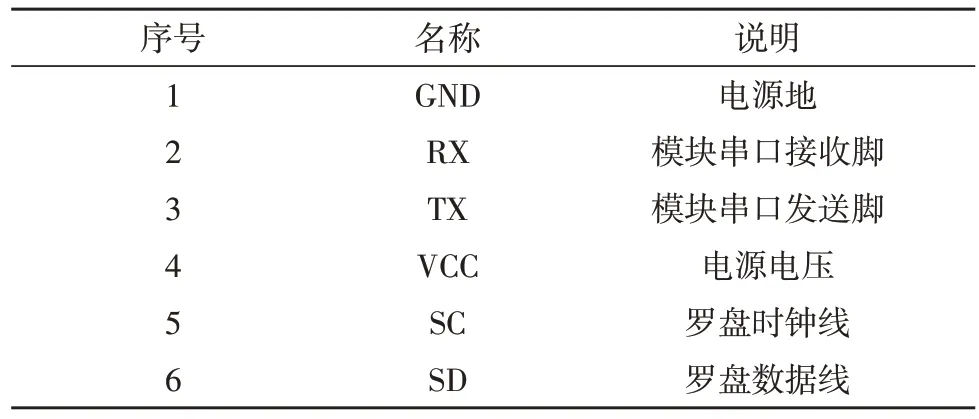
表1 GPS模塊接口組成
1.3 油電混合自動控制動力模塊
油電混合動力模塊的組成包括油動和電動模塊。將油電動力組合在一起,發揮其優勢性能,是一種復合動力模塊,隸屬于油電混動多旋翼無人機自動控制系統[9-10]。油電混合動力模塊按照連接方式的不同,分為串聯式油電混合動力模塊、并聯式油電混合動力模塊和混聯式油電混合動力模塊[11-12]。油電混合動力模塊安置在多旋翼無人機上,多旋翼無人機的設計根據結構特點,設計成串聯、并聯和混聯動力3 種布置形式。電機和油電混合動力模塊的基本設計結構如圖3、4 所示。
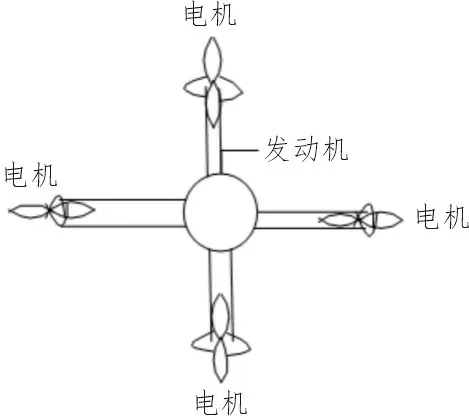
圖3 電機模塊構造
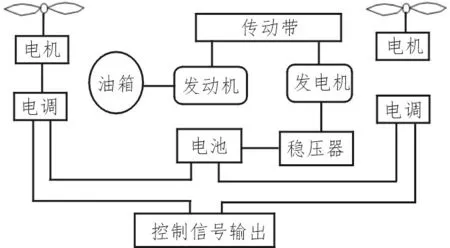
圖4 油電混合動力結構
硬件系統設計中,包括機載系統、GPS 定位模塊、油電混合動力模塊以及基礎電源電路、傳感設備、檢測設備等。采用傳感器獲取與存儲數據,GPS定位模塊通過控制器獲得數據,處理器調和與數據處理,可獲得定位點的緯度、經度信息[13]。將處理后的相關數據交付給控制系統,為油電混合動力模塊提供基礎數據。
2 軟件設計
2.1 PID控制算法
PID控制算法是對飛行器自動控制中相關數據參數的校正與處理。在控制中,PID 算法的表達式為:

式中,P(t) 代表控制器的輸出;kp代表數據控制器的比例系數;T1代表初始控制器積分時間;TD代表最終的控制器積分時間[14-16]。
對式(1)進行離散化處理操作,通過差分方程代替微分方程的方式,將微分項用增量式、積分項求和,得到:

式中,k代表采樣序號;E(k-1)代表第k-1 次采樣偏差;T代表控制器積分時間。
通過PID 控制算法有效縮短無人機多旋翼控制時間,更好地實現精確化控制。
2.2 基于AI圖像識別的無人機多旋翼控制
AI 圖像識別技術借助計算機對圖像進行處理,使計算機能像人一樣辨別圖像。AI 圖像識別原理如圖5 所示。
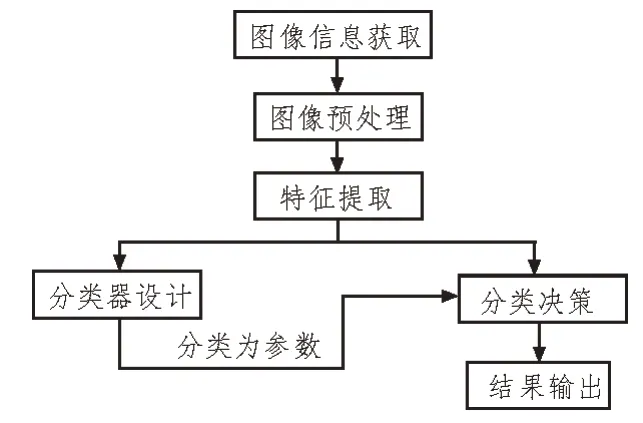
圖5 Al圖像識別原理
在圖像識別過程中,首先獲取圖像信息,通過傳感器把聲音、光線等信息轉換為電子信號;然后進行圖像信息的預處理,主要是指對圖像進行去噪、變換和平滑等操作;提取圖像特征。最后設計分類器和分類判定,其中設計分類器是基于訓練的識別,并對圖像的大小、形狀、顏色等特征進行分析、判斷,輸出識別結果[17]。
根據無人機航向、姿態等信息,采用PID 控制算法,設計多旋翼控制流程,如圖6 所示。
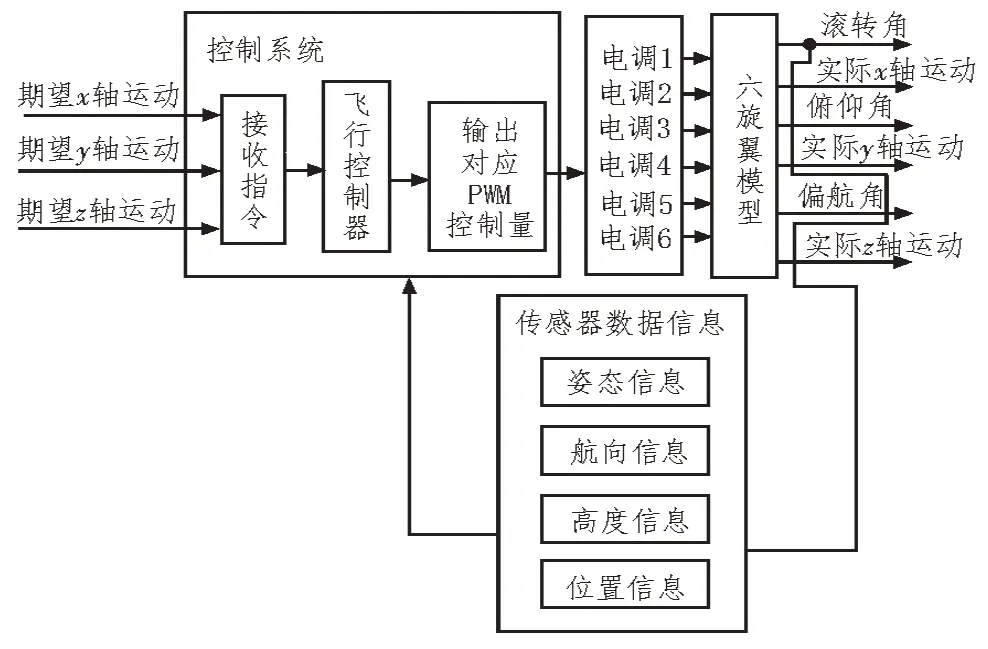
圖6 多旋翼控制流程
利用遙控器或地面站發出指令,飛行器接收到指令信號后由控制器控制,控制器接收傳感器數據后解算出的姿態、航向、高度和位置等信息,將期望值和反饋值進行差分運算,得到偏差量,借助相關控制算法計算出控制量對應的PWM 信號,電調按照不同的PWM 輸出電流對電機相應的轉速進行相關控制,改變六旋翼的姿態效果。姿態的變化能夠對其位置產生影響,位移的變化最終也是借助姿態的變化體現,姿態與位移相互聯系。垂直提升和下降依靠控制油門大小進行控制。
2.3 自動控制流程
多旋翼無人機控制流程,如圖7 所示。
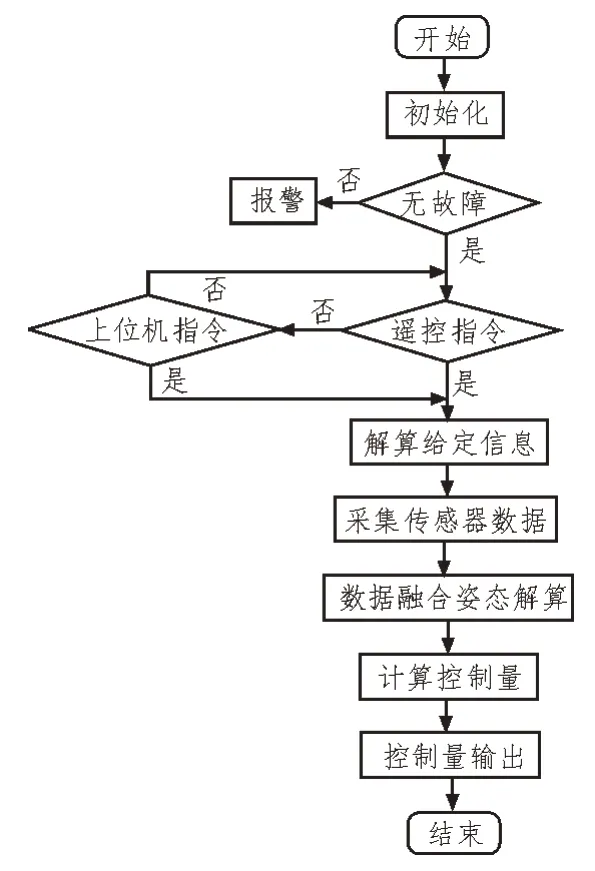
圖7 多旋翼無人機控制流程
主控制器元件開始運行后,接口配置、傳感器、控制裝置元件也被啟動,獲取初始化數據,檢測機體狀態與通信數據,若出現異常,則報警;飛行器自檢過程完成后,能夠對地面站發出的控制指令進行接收,控制器采集到傳感器的數據信息,經由濾波融合等相關處理過程之后,進行飛行器的姿態、位置、高度等信息的解算操作,將得到的信息和給定值作比較,借助PID 控制算法計算出控制數據,完成飛行任務。
3 實 驗
3.1 實驗操作
選擇DJIM600Pro 型無人機,設置在飛行器控制器內的模擬器,模擬調參軟件,創建虛擬3D 環境,將無人機飛行數據傳達到PC 機。對無人機飛行姿態進行實時監控,得到無人機經緯度坐標、實時仿真速度、無人機與起飛點的相對距離等飛行數據。
3.2 實驗結果與分析
設定控制多旋翼無人機的選擇角度為120°,以實際轉動為對照組,對比基于傳統GPS 油電混合多旋翼無人機自動控制系統與基于AI 圖像識別油電混合多旋翼無人機自動控制系統的無人機旋轉角與對照組旋轉角的關系。比較兩種控制系統下無人機飛行自動控制的精度。
兩種系統旋轉角對比結果如圖8 所示。
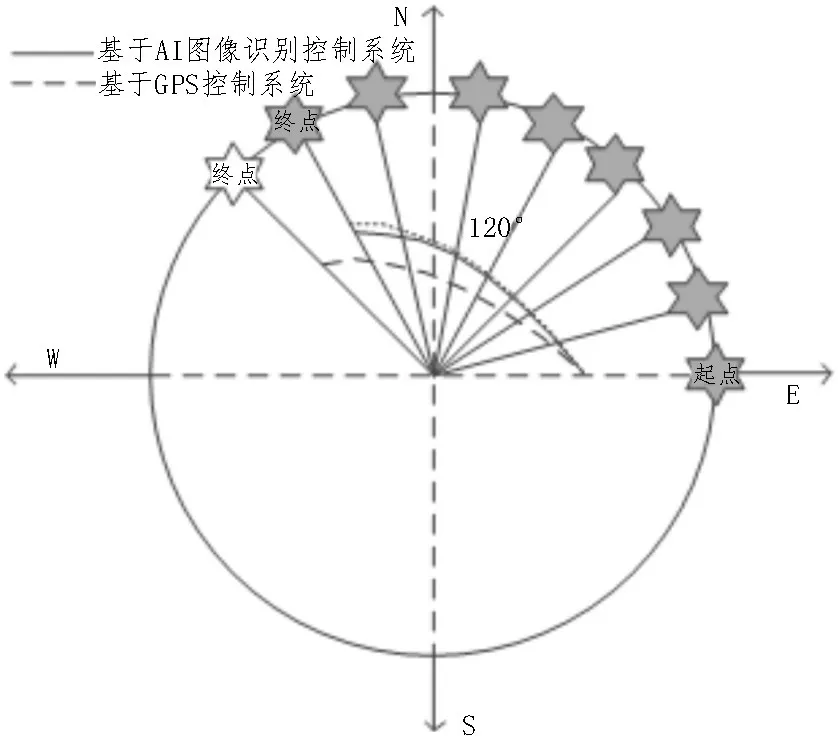
圖8 兩種系統旋轉角對比結果
由圖8 可知,從0 旋轉到120°情況下,基于GPS定位下控制下無人機的旋轉角超過120°,基于AI 圖像識別的選擇角與對照組差值小于基于GPS 的旋轉角。由此可知,使用基于AI 圖像識別控制系統旋轉角控制效果較好。
分別使用兩種系統分析控制時間,對比結果如表2 所示。
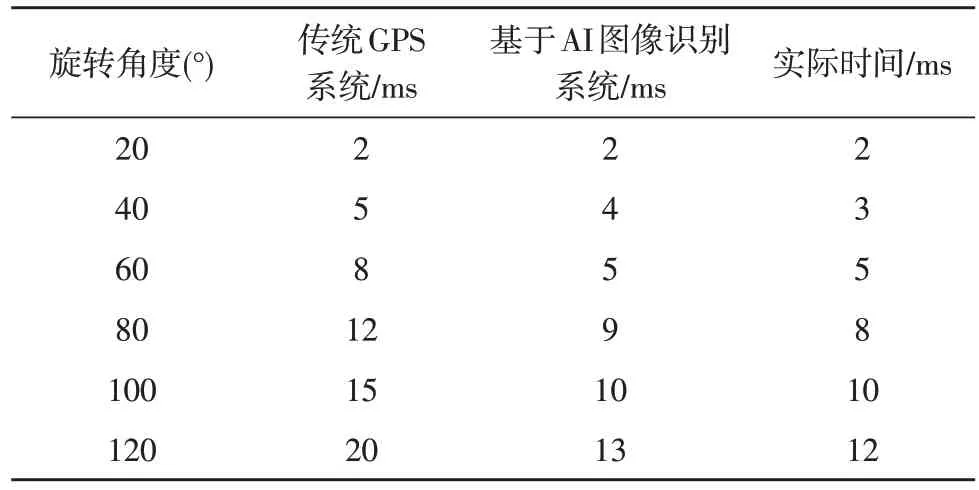
表2 兩種系統控制時間對比
由表2 可知,使用GPS 系統在不同旋轉角度下與實際所用時間不一致。當旋轉角度依次為20°、40°、60°、80°、100°、120°時,控制時間比實際所用時間分別多0 ms、2 ms、3 ms、4 ms、5 ms、8 ms。而采用所提系統在旋轉角度為40°、80°、120°時,控制時間比實際所用時間均多1 ms。
4 結束語
基于AI 圖像識別的油電混動多旋翼無人機自動控制系統,通過對主控制器和GPS 定位模塊,以及控制無人機多旋翼旋轉角度的設計,將油電混合,結合PID 控制算法校正無人機飛行數據,改善傳統系統耗時長的問題,在AI 圖像識別原理基礎上,控制無人機多旋翼,完成油電混動多旋翼無人機自動控制系統設計。然而該系統也存在一定缺點,在以后研究中也要注意對不足之處的改善。