基于純角度的快速收斂無人機環航控制算法
2022-01-06 12:32:56桂欣穎辛沙歐宋震林戚國慶
電子設計工程 2021年24期
關鍵詞:控制策略
桂欣穎,辛沙歐,宋震林,戚國慶
(南京理工大學自動化學院,江蘇南京 210094)
無人機一向以體積小巧、飛行靈活而受到歡迎,在民用和軍用領域都有廣泛應用。在軍用領域中,為了能順利完成目標追蹤,對無人機的隱蔽性有一定的要求,因此僅用角度信息進行目標定位的被動跟蹤方案成為近年來的研究熱點[1]。而無人機環繞目標飛行的跟蹤方式是一種能有效提高純角度目標定位可觀測性的跟蹤方式[2-3]。
文獻[4]討論了基于距離量測對一組運動目標進行環航跟蹤的問題。文獻[5]研究了自身位置信息未知的情況下對目標的跟蹤問題,實驗結果表明,機器人不需要測距傳感器,可以僅靠測角信息圍繞目標進行圓周運動。文獻[6]在跟蹤系統中同時使用角度信息和距離信息對非線性目標位置和速度進行估計。文獻[7]提出一種基于自身速度和角度信息估計目標運動速度的分布式算法,并在此基礎上設計了一種分布式導航算法,控制多個觀測器以一定的距離圍繞目標運動。也有學者使用多觀測器進行純角度定位與跟蹤的方法,但是由于對傳感器精確度和時間同步的要求導致多傳感器觀測方法相對復雜并且價格昂貴[8-9]。僅使用角度測量的純方位目標定位方法雖然能解決這一問題,但定位精度依舊需要進一步改進[10-11]。在純角度量測的情況下,目標位置的估計結果很大程度上取決于觀測平臺的運動軌跡[12]。文獻[13]和文獻[14]針對觀測平臺的運動軌跡對跟蹤精度的影響進行了研究,結果顯示在純角度目標跟蹤系統中使用環航飛行可以有效提高跟蹤精度。有學者[3,15]提出一種對較慢速運動目標進行純角度觀測下環航跟蹤的算法,但是該算法的收斂速度有待提高。
在現有的研究成果中,已有多種基于純角度的環航跟蹤策略,但是關于控制器的收斂速度的結論較少。而無人機是否能夠快速收斂至期望軌跡,在實際應用中非常重要,不僅會影響無人機對目標的狀態估計,在一些特殊情況下還可能因為沒有及時接近目標而導致目標丟失。因此該文根據無人機與目標間的相對運動模型提出一種控制方案,并給出可行的控制參數,通過與已有的控制策略進行對比實驗,驗證文中所述控制器的優越性。
1 純角度觀測下的目標狀態估計算法
該文主要考慮無人機對地面上運動的目標進行定位與跟蹤的問題。假定目標只在X-Y平面上運動,無人機也保持恒定高度飛行,且無人機的飛行速率始終大于目標運動的速率。無人機與目標的相對位置如圖1 所示。

圖1 無人機環航跟蹤示意圖
Po為無人機的位置,PT為目標位置,為目標估計位置,vo表示無人機的飛行速率,β(t)為角度量測,η(t)表示無人機與目標的測向矢量,表示η(t)逆時針旋轉90°的向量,D(t)表示無人機與目標間的實際距離。

根據文獻[1]提出的基于虛擬機交叉定位算法的目標估計策略,如圖2 所示。
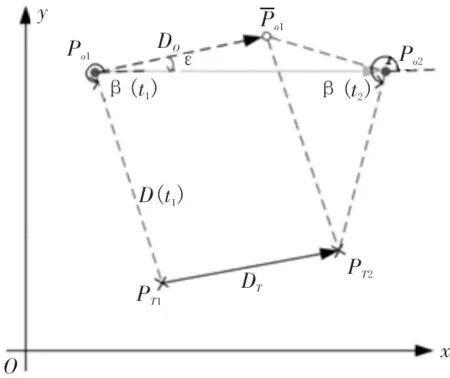
圖2 虛擬機交叉定位原理圖
Po1、Po2、PT1、PT2是t1和t2(t2>t1)時刻無人機與目標的位置。根據目標的運動速度,得出在Δt采樣時間內目標的運動距離為,將無人機以相同的方向移動同等距離,該點即為無人機在t2時刻的虛擬位置。

其中,Zβ(t)=β(t)+?(t)表示含有高斯白噪聲的量測信息。
2 無人機環繞控制策略
2.1 無人機環繞控制算法
在對運動目標進行純角度目標定位時,無人機以目標為圓心,以給定的距離為半徑進行環繞式飛行,這是一種對目標進行角度觀測的有效策略。在實際應用中,通常希望無人機能夠快速收斂到期望軌跡,以應對復雜的環境變化。該文針對這個問題提出一種能快速收斂的、具有更好抗干擾性的無人機環繞控制策略。
無人機與目標的相對運動模型如圖3 所示,無人機的運動模型為:

圖3 無人機與目標的相對運動模型圖

vo為無人機的運動速率,Po=[xo yo]T∈R2指無人機的位置,PT=[xt yt]T∈R2指目標的位置,vo=[vocosψo vosinψo]T∈R2表示無人機的速度,ψo為無人機的航向,ωo為無人機的控制輸入角速度。
而目標的運動模型為:
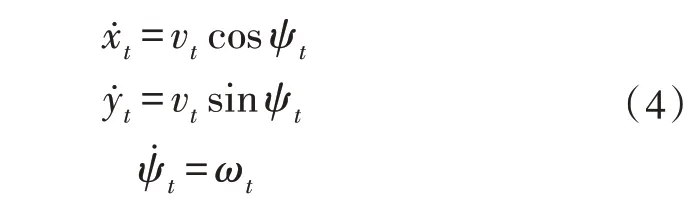
vt為目標的運動速率,PT=[xt yt]T∈R2指目標位置,vt=[vtcosψt vtsinψt]T∈R2表示目標的速度,ψt為目標的航向,ωt為目標的角速度。
設無人機與目標間的相對速度為vr,那么vr=vo-vt,根據式(3)和式(4)可得相對運動模型為:

其中,[xr yr]T∈R2為無人機相對于目標的位置。
在這個運動模型下給出無人機對目標進行環繞式飛行的控制策略,如下:

其中,ed=d-Dd表示實際環航距離與期望環航半徑的差,Dd表示期望的環航半徑。β為無人機與目標間的方向角,φ為相對速度與視線之間的夾角,Φ(ed)為控制器參數,在文中設計為:

取k1,k2∈R+,K∈(]0,1,α=p/q(其中0 <p<q,且均為奇數)。sat()為飽和函數,定義為:

式(6)表示的控制策略中,無人機能夠以目標位置為圓心,以給定距離為半徑做環繞式跟蹤飛行,并且能夠快速收斂。
2.2 算法有效性證明
無人機在進行環航跟蹤時,速率應始終大于目標運動速率,此節將在這一前提條件下對式(6)控制策略的穩定性進行證明。
定義無人機與目標的相對運動模型如下:

由式(5)和式(9)可得:

如 圖3 所 示,vr可由向量η(t) 和((t) 表示為。可求解出式(10)中的相對速度,如式(11)所示:

根據假設,無人機的最大運動速率應該大于目標的運動速率,因此相對速率vr∈R+。因此對于給定的恒定無人機輸入速率vo,可由式(8)得到唯一的一個相對速率vr。又由vr=vo-vt和式(11)可以得到無人機速度控制器的結構,應該為:

只需要調節角度變量φ,即可輸入給定的無人機速度控制量。
由于無人機飛行控制器的最終目的是使實際環航半徑收斂于期望環航半徑,即,由ed的定義,顯然ed∈(-Dd,∞),并且=-vrcosφ。為了達到這個目標,令φ的函數,如下所示:

于是由式(12)和式(13)可得無人機飛行控制策略,即式(6)。由無人機的控制參數(式(8)),和sat()函數的定義可知,當ed>0 時,Φ(ed) >0;當ed<0時,Φ(ed)<0;當ed=0時,Φ(ed)=0。
為了證明系統的輸出穩定性,選取Lyapunov 函數,如式(14)所示:

顯然,式(14)是正定的,其導數如式(15)所示,對于文中設計的如式(8)所示的控制參數,總是負半定的。

根據拉薩爾不變集原理[16],ed收斂至0,即實際環航半徑收斂于期望環航半徑。
3 仿真結果與分析
設定目標的初始位置Pt(0)=(2,3)Tm,目標的運動軌跡為Pt(t)=(2+t,3+10 sin(0.1t)+t)Tm,無人機的初始位置Po(0)=(9,8)Tm,設定無人機飛行速率為20 m/s,期望環航半徑Dd=10 m。設定控制器參數K=1,k1=0.1,k2=0.01,α=7/11。圖4 為目標環航跟蹤的軌跡圖,圖5 為實際環航半徑,圖6 為目標在x方向和y方向上的位置估計誤差。通過下圖可以看出,文中所述環航跟蹤方案能夠在較小的誤差下完成對目標的位置估計并進行環航跟蹤,且跟蹤效果良好。

圖4 目標環航跟蹤軌跡圖

圖5 實際環航半徑
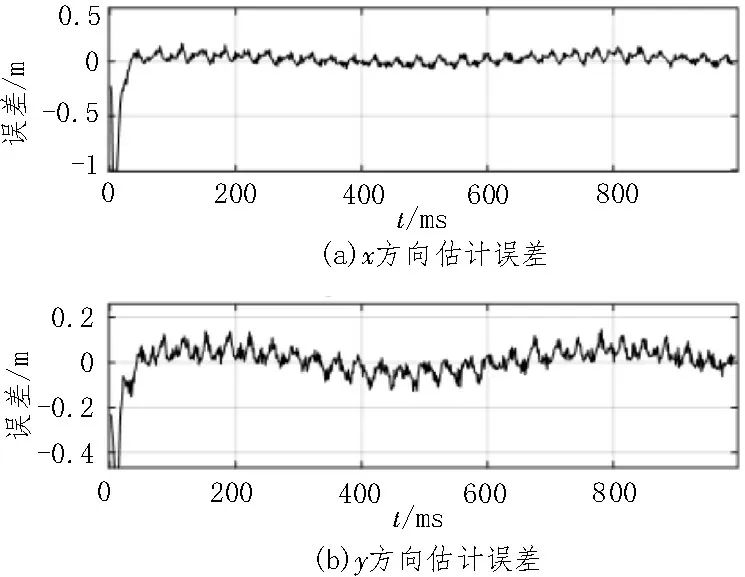
圖6 位置估計誤差
通過與文獻[2]中的純角度環航控制方法作比較來說明文中采用控制器的優越性,將文中提出的環航跟蹤策略記為M1,將文獻[2]中提出的環航跟蹤策略記為M2。兩個系統的目標初始位置和軌跡都與上文一致,無人機的初始位置Po(0)=(-20,-20)Tm,設定無人機飛行速率為20 m/s,期望環航半徑Dd=10 m。設定控制器參數K=1,k1=0.3,k2=0.03,α=7/11,對M1 和M2 進行控制策略的仿真實驗,無人機跟蹤軌跡如圖7 所示,圖7(a)和圖7(b)分別為t=2 s,t=4 s 時的跟蹤軌跡。從圖7 中可以看出M1在跟蹤開始2 s 內就迅速接近目標,實際環航半徑快速收斂至期望半徑;而M2 在4 s 后才收斂至期望半徑。環航半徑誤差如圖8 所示,從圖中可以看出,M1的環航半徑誤差和M2 相比有明顯的減小。

圖7 目標環航跟蹤
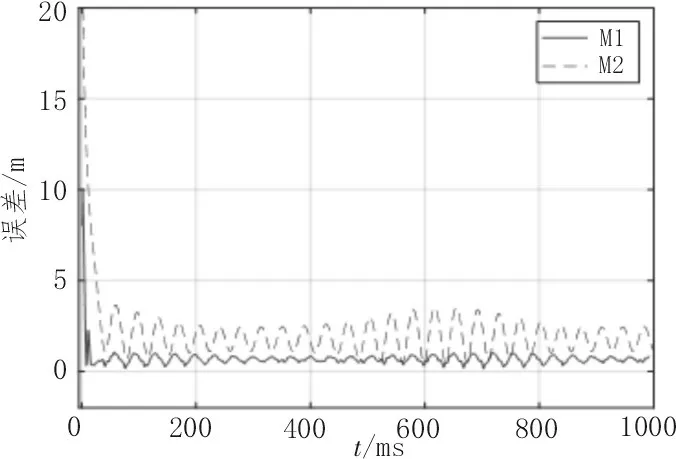
圖8 環航半徑誤差
上述實驗表明,文中提出的控制器能夠以較小的誤差對目標進行環航跟蹤,收斂速度和控制精度相較于文獻[2]所述控制器有明顯提高。
4 結論
該文針對單無人機對單個目標進行純角度環航跟蹤問題進行了相關研究,根據無人機的運動特性設計了一種控制器,以保證無人機能快速穩定地跟蹤運動中的目標;根據李雅普諾夫定理給出了控制器的參數,使得無人機的環航半徑能夠較快地收斂至期望半徑;并通過仿真實驗與已有控制策略進行對比分析,驗證了文中所述控制策略的精確性和快速性都有所提升。上述研究為快速收斂的無人機環航跟蹤提供了一定的技術基礎,進一步的研究可以將應用范圍擴展至多無人機環航跟蹤領域。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36