面向可變功能的機械產品變形設計研究*
2022-01-06 07:17:54徐靈浩賀華波鄧益民
機械制造 2021年12期
□ 徐靈浩 □ 賀華波 □ 鄧益民
1.寧波大學 機械工程與力學學院 浙江寧波 315211 2.浙江省零件軋制成形技術研究重點實驗室 浙江寧波 315211
1 可變功能機械產品概念
可變功能機械產品指可以通過更換系統構件或調整構件間連接方式,進而實現功能切換的特殊多功能機械產品[1]。目前關于可變功能機械產品的設計,主要集中于設計通過更換構件或結構體來實現功能切換的可變功能機械產品,在功能變換過程中存在零件頻繁拆卸和裝配的情況,不僅降低產品作業效率,而且會對產品的壽命造成影響。為此,有必要開展不需要更換系統構件就能夠達到功能變換的可變功能機械產品設計研究。壁掛式折疊桌、多功能工兵鏟等不需要更換系統構件,而是通過產品的結構變形來實現產品功能的變換。也就是說,這些產品基于可變形結構而具有可變功能。
目前,以可變功能機械產品為對象的研究在設計研究領域還相對較少。在設計研究領域中,可重構設計和可適應設計在研究對象上與可變功能機械產品設計存在一定程度的相似[2-3]。可重構設計主要通過重新改變系統配置,以獲得設計方案。可適應性設計主要側重于系統性能的可適應性,而非系統功能的可適應性。Meyer等[4]通過研究表明,在實際設計任務中,大約有70% 屬于變型設計。這里的變型主要指產品結構構成基本保持不變,設計人員根據新的設計要求對結構參數做相應調整、改變,從而產生新的產品型號或系列。另一方面,一些中文文獻對變型設計和變形設計兩者不加區分,認為變型設計不破壞原設計的基本結構特征和基本原理,通過現有產品尺寸、配置、結構的改變來高效、快速地滿足客戶對產品個性化的需求[5-7]。由此,變型設計部分涵蓋了筆者變形設計的內容,但相關研究并未涉及實現可變功能這一特定情況。筆者在對相關可變功能實例分析的基礎上,針對僅對系統結構進行變形就能實現目標功能轉變的可變功能機械產品設計方法展開研究,為機械系統的變形設計和開發提供技術支持。
2 產品相似性分析
目前,對于功能還不存在統一的定義。Pahl等[8]認為,功能是一個系統中輸入與輸出唯一確定且能夠再現的相互關系,用于完成系統能量、物料、信號的轉化。Stone等[9]提出功能基的概念。功能基是一種由流與功能組成,用于表達設計方案的語言,這種語言用動詞+名詞的形式來描述產品功能[10]。
不同的機械產品雖然具有不同的目標功能,但是在產品內部的部分功能上一定存在某種程度的相似,通常情況下,一個機械產品的總功能可以按照功能樹方法逐層進行分解,直到分解為元功能[11]。通過產品目標功能實現過程中執行的元功能的先后順序關系,結合能量、物料、信息流的傳遞方向與轉換位置,可以對元功能進行連接,進一步獲得功能鏈。將產品功能模型中包含元功能最多的功能鏈定義為主功能鏈,主功能鏈的相似性通常決定不同產品在功能方面的相似性。通過比較不同產品間主功能鏈中的相似或相同元功能的數量,可以判別兩條主功能鏈的相似度大小。一般而言,具有功能相似性的機械產品,某些結構或部件也具有一定的相似性,相似程度與所對應的功能存在一定關聯,由此這些機械產品具備設計為一個產品的潛力。
為了便于準確比較各元功能間的相似性,在0~1區間內選擇相似值,0代表兩者功能完全不相同,1代表兩者功能完全相同。按照不同的功能描述,以及輸入流、輸出流相似程度,劃分為不同的相似值范圍,每個相似值范圍中的具體相似值大小由設計人員結合具體情況決定。
功能相似度判定表見表1。
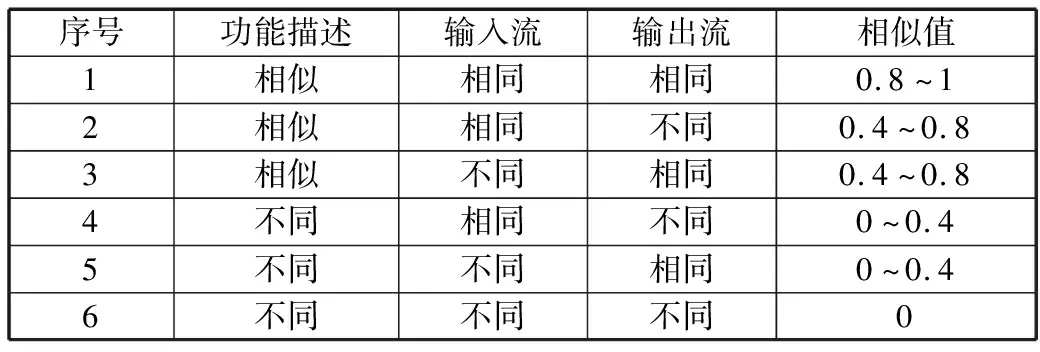
表1 功能相似度判定表
基于功能相似度判定表,以及在元功能實現過程中相關結構體的參與情況,可以進一步得到產品結構相似度。產品結構相似度表示產品結構間的關聯關系,是產品功能相似度的映射。
3 可變功能機械產品變形過程分析
3.1 產品結構體類型
為便于開展對多個原單一功能的機械產品進行面向可變功能的再設計,基于這些產品的結構在再設計過程中的作用特點,以及結構相似性分析,將不同相似度的結構體歸類,并定義為三種主要結構類型。具體劃分類別的相似值范圍,可以依據產品類型的不同適當調整。
(1)基礎部分。主要執行產品的基礎功能,由大多數相似度極高的結構體組成。實現基礎功能的結構體在客觀功能的表現上往往相似,并且結構體間的關聯性極強,所起到的功能作用基本相同,稍加修改基本可直接應用于可變功能機械產品。
(2)共性部分。主要執行產品的共性功能,由大多數相似度適中的結構體組成。這些結構體既表現出結構的相似性,又表現出結構的差異性,是功能相似性和差異性在物理層面的具體表現形式。
(3)個性部分。主要執行產品的個性功能,由少數相似度極低或毫無相似度的結構體組成,負責原產品的應用功能,表現產品的功能特點,是產品自身與其它產品相區別的應用集合。
3.2 結構體變更設計
由于產品結構體自身的設計思維差異和加工性能、材料的不同,為獲得能夠滿足多個功能目標要求的可變功能機械產品的結構體,需要對原產品的結構體去除差異性,并重新設計部分結構。為此,筆者針對三種主要類型結構體提出三種設計策略。
(1)選優設計。工程師結合不同產品結構體的加工性能和使用度,選擇基礎部分中性能較好的產品結構體予以保留,并稍加修改,來實現局部性能的提升,得到可以直接應用為可變功能機械產品的基礎結構體,作為承擔可變功能機械產品的基礎功能載體。
(2)集成設計。對共性部分中的結構體進行合成,將多個不同產品的結構體功能結構特征集成到一個新結構體上,使新結構體能結合變形操作手段,在不同功能狀態下發揮出不同的功能結構特征,可以應用為可變功能機械產品的共性結構體,作為承擔可變功能機械產品的共性功能載體。
(3)重新設計。對結構關聯性較弱的個性部分結構體分別進行重新設計,主要包括形狀、尺寸、材料,以配合可變功能機械產品不同結構狀態下實現不同目標功能。
3.3 變形類型
通過對多種不同類型可變功能機械產品的研究分析可知,基礎結構體、共性結構體、個性結構體在滿足相應約束條件下進行組合變形,可以實現不同的功能,從而使機械產品具有不同功能。筆者通過改變結構體間連接方式,以及對不同結構體采用旋轉、拉伸、折疊、壓縮、平移等變形操作手段,使結構體的空間幾何位置、形狀、組合方式等發生變化,實現共性結構體不同功能結構特征的釋放與壓縮,以及個性結構體的切換,最終達到可變功能的目的。基于上述分析,將可變功能機械產品的主要變形類型分為三類。
(1)類型一。產品僅包括基礎結構體和集成后的共性結構體,通過變形操作使同一共性結構體在不同目標功能狀態下發揮不同的功能結構特征,使目標功能發生改變,最終實現可變功能。
(2)類型二。產品僅包括基礎結構體和一個以上的個性結構體,通過變形操作對具有不同應用功能的個性結構體進行切換,使目標功能發生改變,最終實現可變功能。
(3)類型三。產品同時包括基礎結構體、共性結構體、個性結構體,通過變形操作使同一共性結構體在不同目標功能狀態下發揮不同功能結構特征,并對具有不同應用功能的個性結構體切換,實現可變功能。
4 可變功能產品機械結構-視圖模型
筆者以黃長林等[12]提出的零件族結構-視圖為參考,基于對可變功能機械產品變形過程的分析,建立面向可變功能機械產品的產品級結構-視圖模型。通過模型中的結構參數和空間約束,描述產品的規格和性能,同時描述產品、部件、結構體,以及它們之間的相互關系,得到將產品變形設計所需的結構體在實施空間上進行布局與拼接后構成的可變功能機械產品。
可變功能機械產品模型M可以表示出構成產品的結構體集合及相關的約束關系。
M=(C,E)
(1)
C為結構體的空間布局約束,包括所有結構體的空間定位關系及參數,可以表示產品各結構體間的位置及相互關系。E為構成可變功能機械產品的結構體集合,包括結構的幾何及拓撲關系、結構變形類型、結構尺寸參數等。
(2)
Sjk為第j個結構體第k種結構體類型的產品識別碼,k為1表示基礎結構體,k為2表示共性結構體,k為3表示個性結構體。A為結構體的屬性集合,包括結構體的材料、力學性能,以及經過結構體的輸入流、輸出流等。I為結構體變形編碼,包括多種結構體間的變形算子,如旋轉?、壓縮Ξ、拉伸ι、折疊Φ、平移-、無×。Dj為第j個結構體的尺寸參數集合。
結構體的視圖可以作為結構的信息載體,視圖模型V為:
V={Vl,Sjk,L,Q}
(3)
Vl為三維視圖的標志碼,l為1表示功能變更前,l為2表示功能變更后。L為定位點,包括定位點的位置坐標與相鄰結構體的變形算子。Q為旋轉角度,包括相對于上一結構體的相對角度和相對于坐標系統的絕對角度。在結構-視圖模型中,相對角度通常標注于絕對角度上方。
5 實例分析
對兩個單功能產品無人機和無人車進行面向可變功能的變形設計,使單功能無人機和無人車僅通過改變結構形態就能夠實現飛行與地面行駛功能,成為具有雙重功能的可變功能無人機。
分別對無人機和無人車的總功能按照功能樹進行逐層分解,直到獲得相應的元功能,并將元功能連接為功能鏈。分別選取無人機和無人車的主功能鏈,建立功能邏輯圖,分別如圖1、圖2所示。

▲圖1 無人機功能邏輯圖
根據主功能鏈中元功能的功能描述,結合表1,考慮各元功能實現過程中相關結構體的參與情況,進行結構相似度分析,并進一步根據各結構體不同的相似度及結構特點,將無人機與無人車的不同結構體劃分到基礎、共性、個性三部分,見表2。

▲圖2 無人車功能邏輯圖
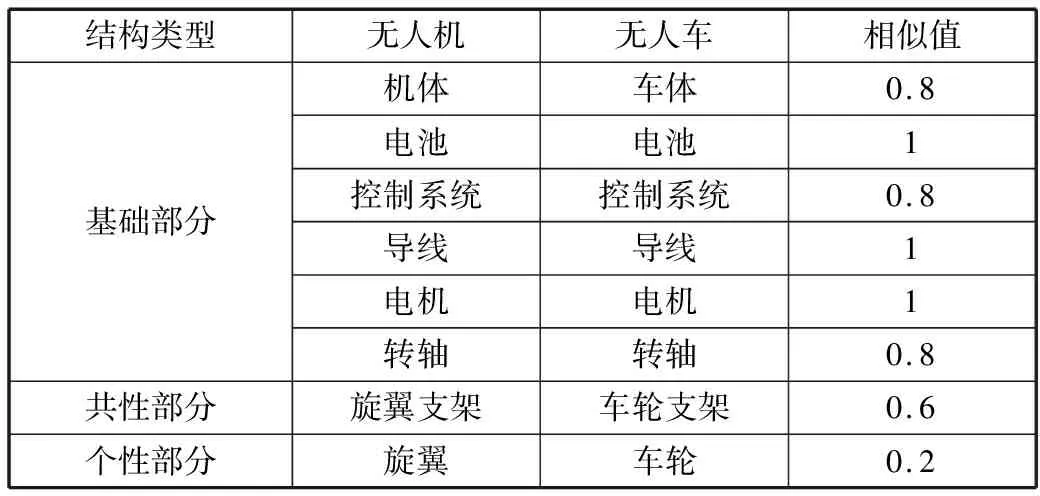
表2 無人機與無人車結構類型
通過進一步分析無人機和無人車的工作模式、結構,以及向目標環境的輸出屬性,包括力的大小和方向,筆者決定采用旋轉變形手段和平移變形手段來改變共性結構體的功能表面,切換個性結構體,傳遞動力,最終實現功能的切換。
在上述分析基礎上,分別針對不同類型結構體進行相應設計。對于基礎部分的結構體而言,分析無人機和無人車功能的使用度,考慮加工性能,選取無人機產品中的機體、充電電池、控制系統、導線、電機、轉軸稍加修改,作為新產品的基礎結構體,即機體S11。針對共性部分的結構體旋翼支架和車輪支架,集成設計為一個特殊支架,使其可以同時對旋翼和車輪起支撐作用,作為新產品的共性結構體,即支架S22。對個性部分的旋翼和車輪進行重新設計,增大車輪直徑,減小車輪厚度,將材料更換為更輕便的復合材料,并增大旋翼的尺寸。將重新設計后的結構件作為新產品的個性結構體,即旋翼S33和車輪S34,發揮不同的應用功能。最后根據各結構體的參數和空間約束,建立可變功能無人機的結構-視圖模型,如圖3所示。圖3中,實線箭頭表示處在工作時的結構位置層次從屬關系,虛線箭頭表示處在非工作時的結構位置層次從屬關系。
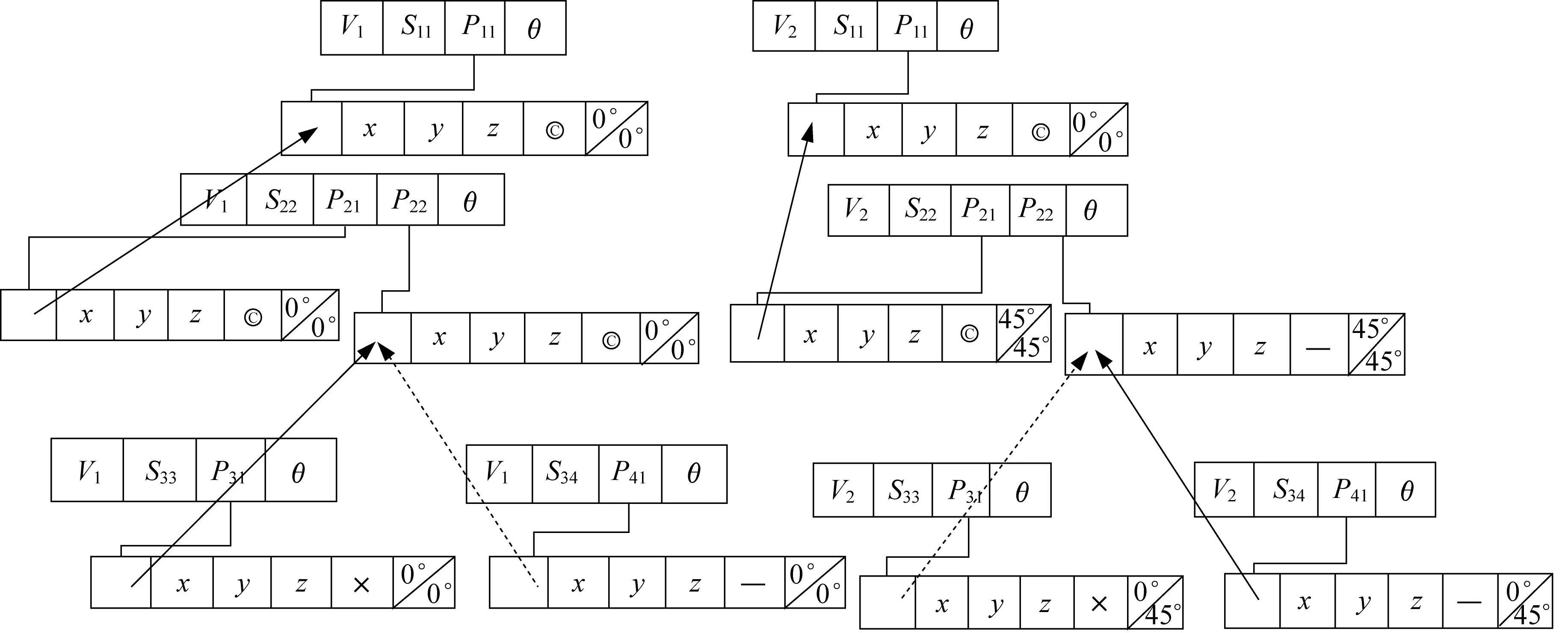
▲圖3 可變功能無人機結構-視圖模型
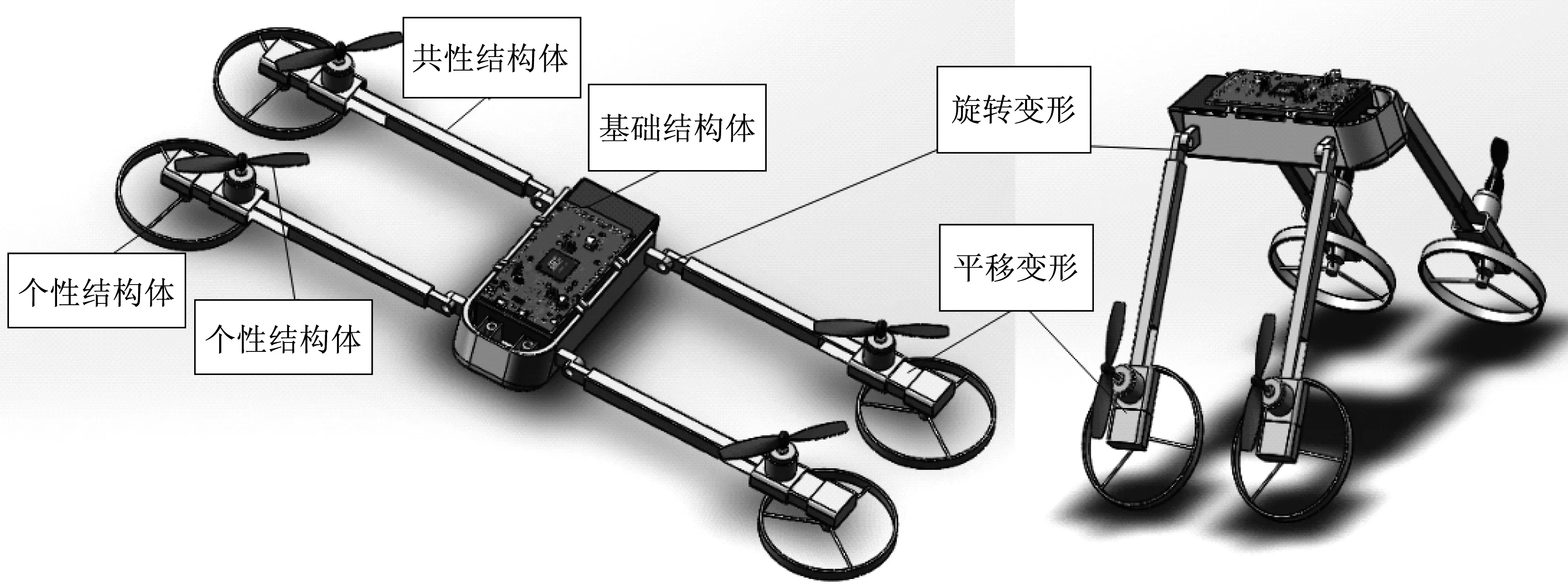
由于作為基礎結構體的無人機部分結構體變動不大,因此在結構-視圖模型中只對機體、支架、旋翼、車輪四個結構體進行分析,在此基礎上建立可變功能無人機概念模型,如圖4所示。
可變功能無人機在支架處于水平狀態時,旋翼與電機接觸,車輪結構體遠離電機,發揮無人機的功能。通過旋轉和平移變形操作后,車輪結構體與電機接觸,發揮無人車的功能。
6 結束語
目前設計研究領域中缺少通過系統結構形態改變來實現功能變換的機械產品設計方法,對此,筆者提出面向可變功能的機械產品變形設計方法。通過對不同產品的相似性,以及不同構件間運動連接方式的特點進行分析,對相關結構進行分類,對不同結構類型進行變更設計,得到可用于新產品的結構體,并在此基礎上構建相關的結構-視圖模型,描述新產品各結構體之間的相互關系,進而實現將多個單一功能產品再設計為一個僅需通過產品結構形態改變就可以實現功能切換的可變功能新產品。這一方法對可變功能機械產品的設計和開發具有一定的指導意義,其中不同結構類型的劃分方法,以及如何針對不同結構類型進行相應變更設計,還需要開展進一步研究工作。
▲圖4 可變功能無人機概念模型
猜你喜歡
藝術啟蒙(2023年2期)2023-11-03 17:07:38
中華詩詞(2020年1期)2020-09-21 09:24:52
當代工人(2020年8期)2020-05-25 09:07:38
雜文月刊(2019年14期)2019-08-03 09:07:20
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
中國工程科學(2017年3期)2017-09-05 09:40:54
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
高中生·天天向上(2016年10期)2016-11-23 09:02:08